
Замкнутые системы управления реферат
Обновлено: 04.07.2024
ЗАМКНУТые СУЭП В замкнутой СУЭП (или системе с отрицательной обратной связью) управление U(t) формируется в зависимости от отклонения управляемой переменной у(t) от задающего воздействия x(t). U(t)=f[x(t)-y(t)]=f[(t)]. Точность стабилизации координаты оценивается отклонением ее от заданного значения под действием возмущающего воздействия. Во многих промышленных механизмах системы регулирования предназначены для стабилизации с
заданной точностью скорости и момента М электродвигателя и связанного с ним рабочего механизма при действии на систему различного рода возмущений. Одним из основных возмущающих воздействий, влияние которого должно быть скомпенсировано системой является момент статического сопротивления Мс(t) на валу ЭД. Регулирование скорости с высокими статическими и динамическими свойствами в настоящее время проектируются с помощью
одно- и многоконтурных систем с различными видами обратных связей. В одноконтурных системах применяются следующие обратные связи: отрицательная по скорости, отрицательная или положительная по току и отрицательная по напряжению; В двухконтурных системах - сочетание перечисленных обратных связей одноконтурных систем. По структуре замкнутые СУЭП выполняются трех видов: с общим сумматором; с независимым регулированием
параметров; системы подчиненного регулирования. Система с общим сумматором Рис. 1 В системе для регулирования параметров используется непрерывное и задержанное (с отсечками) ОС. Все сигналы суммируются с задающим сигналом Uз на входе усилителя У, который служит для повышения коэффициента усиления системы. Такие системы обычно используют для регулирования одного параметра (скорости). Настройка качеств регулирования
осуществляется компромиссно для разных параметров. Независимая настройка каждого параметра невозможна. Система с независимым регулированием Рис.2 Каждому параметру соответствует свой регулятор Р1-Рn и свой сигнал задания ( Uз1. Uзn) .В такой системе в каждый момент времени регулируется только один параметр. Это обеспечивает логическое переключающее устройство ЛПУ , которое подключает на вход системы выход регулятора
В самом общем смысле управление и отображение — всегда взаимная вложенность понятий, выражающих эти процессы, и самих объективных процессов, протекающих в Объективной реальности.
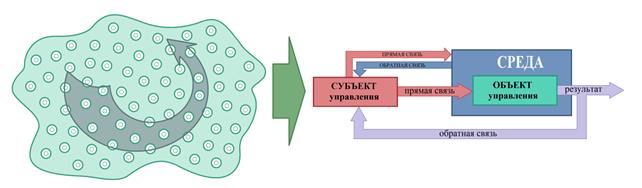
УПРАВЛЕНИЕ — информационно-алгоритмический процесс — является отображением: из объекта и среды, окружающей объект управления, в систему управления объектом — обратные связи; и из системы управления объектом в объект и среду — прямые связи. Обратные связи, по которым поступает информация о состоянии среды и положении объекта в ней, — внешние обратные связи; а по которым поступает информация о состоянии элементов объекта и системы управления им, — внутренние обратные связи. Аналогичным образом на внешние и внутренние подразделяются и прямые связи (рис 66).
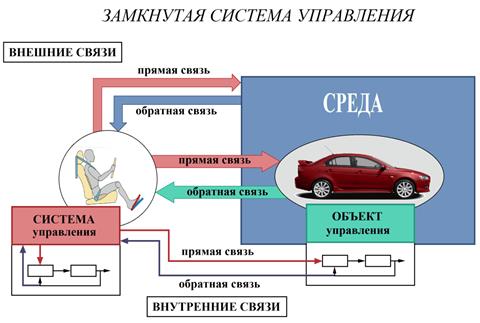
Объект, находящийся в среде, и система управления им, связанные друг с другом цепями прямых и обратных связей, далее будем называтьЗАМКНУТОЙ СИСТЕМОЙ(далее это термин).
В прошлых редакциях ДОТУ нашёл выражение расширительный подход, однако он не был пояснён, что у некоторой части читателей (особенно знакомых с какими-то техническими версиями теорий управления) вызывало вопросы.
В настоящей редакции мы сохраняем расширительный подход к толкованию упомянутых терминов, и потому в контексте ДОТУ следует принять определения прямых и обратных связей с подразделением их на внешние (уходящие в средy) и внутренние (локализованные в пределах объекта управления и системы управления) так, как они даны ранее.
Ø для прямых связей — на основе соотнесения мощности управляющего воздействия на объект или среду, порождаемого системой управления, с собственными характеристиками объекта управления (смотря по обстоятельствам, так в случае управления движением в смысле теоретической механики это может быть соотнесение сил управляющего воздействия с массой, с моментами инерции, с характеристиками сил и моментов сопротивления движению);
Ø для обратных связей — на основе соотнесения мощности управляющего воздействия, порождаемого системой управления, с параметрами, характеризующими отклонение объекта от заданного режима и параметрами, характеризующими воздействие среды на объект, реакцией на которые является вырабатываемое системой управление.
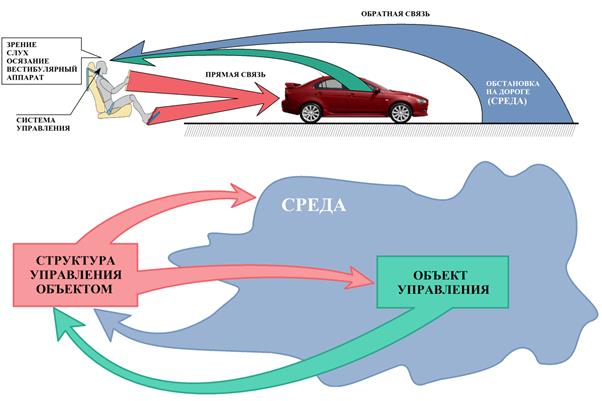
Примером замкнутой системы является — автомобиль с водителем (рис. 67). Автомобиль — объект управления. Водитель, ещё более точно, — его алгоритмика психики, — система управления. Обратные связи замкнуты через зрение, слух, осязание и вестибулярный аппарат водителя, а прямые — через его руки и ноги, воздействующие на исполнительные органы: руль, педали, рукоятку переключения передач, тумблеры и кнопки. Кроме того, иерархии замкнутых контуров прямых и обратных связей имеются в системах и устройствах автомобиля и в самом человеке.
Ø САМОУПРАВЛЯЮЩИЙСЯ ОБЪЕКТ, в котором не удаётся выделить систему управления им, также представляет собой замкнутую систему,
— поскольку в нём самом имеет место кольцевая замкнутость прямого и обратного отображений в некоторой иерархии контуров циркуляции информации.
Примером такого рода самоуправляющихся объектов с нелокализуемой системой управления является сливной бачок унитаза с поплавковым регулятором уровня воды. Система управления не локализована в том смысле, что её невозможно отличить от самого объекта, как возможно отличить водителя от автомобиля или блок автопилота от самолёта в целом. Кроме того, и методом изъятия узлов в замкнутой системе с нелокализованной системой управления невозможно достичь ничего, кроме как привести её в аварийное или в принципе неработоспособное состояние;
ð в замкнутых системах с локализованной системой управления изъятие системы управления НЕ нарушает в принципе работоспособности объекта управления.
Управляющий сигнал через прямые связи подаётся на исполнительные органы (и в окружающую среду при необходимости), что и обеспечивает управляющее воздействие на объект. По цепям обратных связей в систему управления в процессе управления подаётся информация о состоянии окружающей среды, объекта, исполнительных органов, самой системы управления (рис. 69).




Управление — ЦЕЛОСТНАЯ ФУНКЦИЯ:целостная в том смысле, что изъятие из неё тех или иных этапов делает данное управление невозможным, т.е. концепцию неосуществимой, а цели недостижимыми.
7. Структурный и бесструктурный
способы управления
В процессе управления замкнутая система и её часть — система управления — образуют СТРУКТУРУ:
ð подчинённую вектору целей (обусловленную им)
ð и несущую концепцию управления и составляющие её целевые функции.

Ошибки в построении структуры, вызывающие её общее несоответствие:
· вектору целей
· и множеству допустимых векторов ошибки,
— могут свести практически на НЕТвысокую функциональную пригодностьэлементов структуры.
Поэтому при функционально пригодных (хороших в этом смысле) элементах, образующих структуру, вектор ошибки управления тем не менее, будет ВНЕ допустимых пределов.
ЕСЛИпри этом:
Ø структура создаётся до начала процесса управления,
Ø и её архитектура и элементнаябазане изменяются в его ходе,
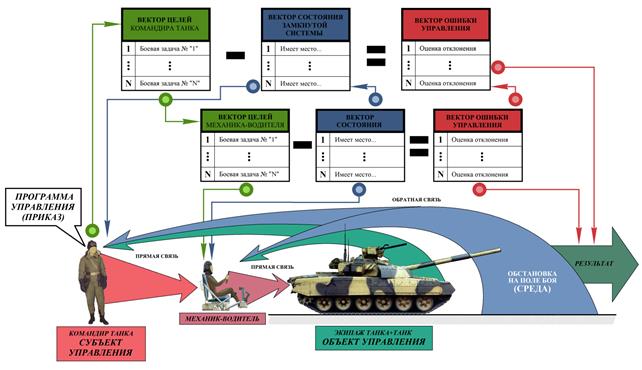
— то характеристики вектора ошибкиуправления определяются прежде всего соответствием архитектуры структуры вектору целей и множеству допустимых векторов ошибки управления(рис. 73): это даёт основание к тому, чтобы такой способ управления назвать СТРУКТУРНЫМ.

При управлении структурным способом происходит:
Ø адресное распространение функционально ориентированной информации по элементам структуры, неизменной в процессе управления.
Примеры структурного управления:
- управление самолётом при помощи автопилота, представляющего собой структуру разнородных элементов;
- командный состав любой воинской части,
- административный состав любого завода, института и т.п. также представляют собой структуру.
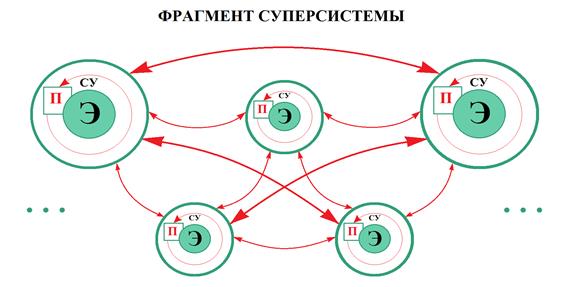
Каждый из элементов суперсистемы обладает способностью:
· запоминать проходящую через него информацию вероятностным образом
и также вероятностным образом
· передавать информацию другим элементам, входящим в это множество;
— то есть во множестве могут протекать процессы прямого и обратного отображения.
Поведение же элементов этого множества определяется их внутренним информационно-алгоритмическим состоянием.
В совокупности это означает, что:
1) Все элементы самоуправляемы на основе информации их памяти.
2) Каждым из них можно управлять извне, поскольку они могут принимать информацию в память (по 1).
3) Они могут управлять другими элементами (по 1, 2), поскольку могут выдавать информацию из памяти другим элементам множества.
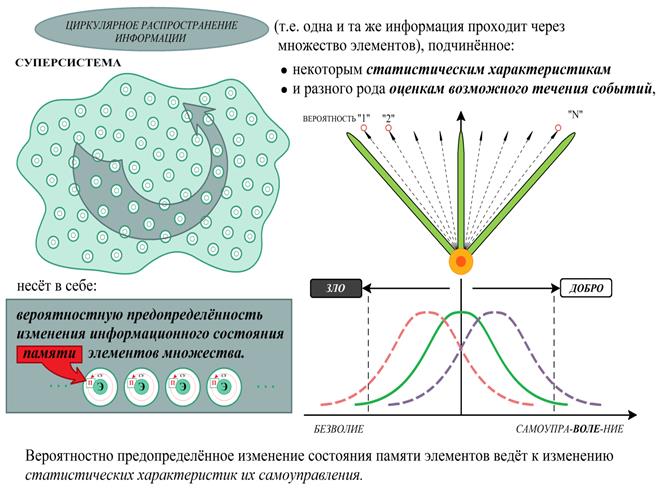
Если распространение информации в этом множестве и его последствия обладают устойчивой предсказуемостью в статистическом смысле (то есть порождает предсказуемую статистику явлений), то возможно:
ð БЕССТРУКТУРНОЕ УПРАВЛЕНИЕ этим множеством,
ð БЕССТРУКТУРНОЕ САМОуправление.
В таком множестве элементов,
· обладающих различным информационным состоянием их памяти,
· подчинённым статистическим закономерностям,
— существует вероятностная предопределённость и вероятностьтого, что:
циркулярное безадресное прохождение в среде информационного модуля определённого содержания приведёт к тому, что элементы множества на основе самоуправления сложатся в одну или более структур, ориентированных на некий, соответствующий указанному информационному модулю вектор целей в течение вполне приемлемого интервала времени, а вектор ошибки в возникшем процессе управления не выйдет за допустимые пределы.
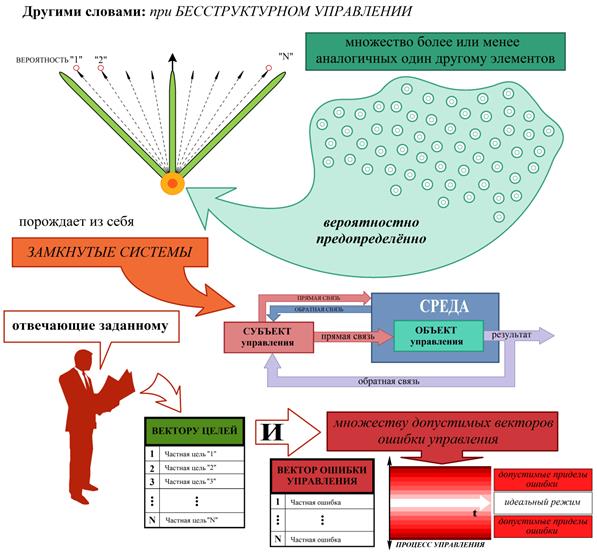
Главное отличие бесструктурного управления от структурного: структура формируется НЕ директивно-адресно до начала процесса управления, а возникает управляемо и вероятностно предопределённо в ходе процесса управления на основе преимущественно безадресного циркулярного распространения информации.
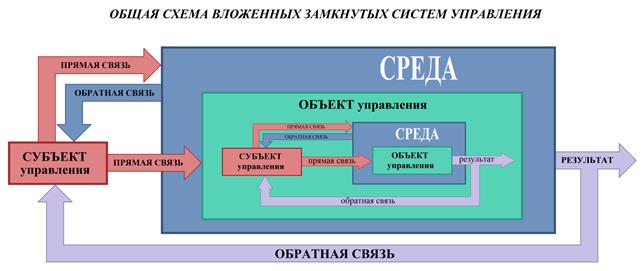
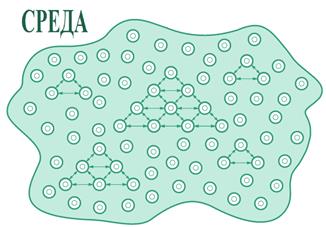
Ø Поэтому множество элементов, в котором протекает процесс бесструктурного управления, само является замкнутой системой иерархически упорядоченных контуров прямых и обратных связей, архитектура которой меняется в ходе процесса управления (рис. 77).
Также это множество элементов является СРЕДОЙ, порождающей из себя структуры в процессе её самоуправления (рис. 78).
Поясним разницу в понимании этого термина в физике и ДОТУ.
Система является замкнутой в том и только в том случае, если поток энергии на входе и выходе системы равен нулю. Однако такая ситуация является лишь частным случаем. В общем случае поток энергии на входе и выходе системы не равен нулю. Замкнутые системы являются частным случаем открытых систем. Система является открытой тогда и только тогда, когда она обменивается потоками энергии с окружающей её средой.
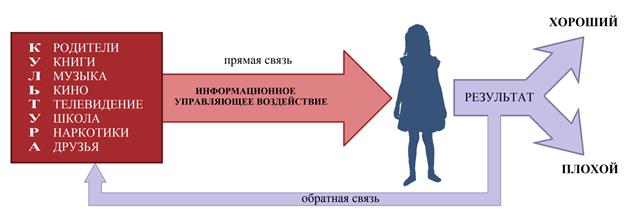
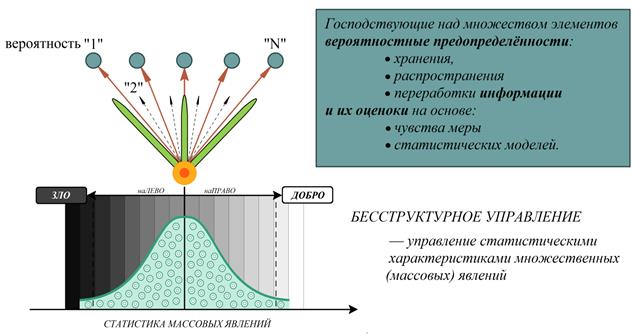
Бесструктурное управление в его существе — управление статистическими характеристиками множественных (массовых) явлений на основе господствующих над множеством элементов вероятностных предопределённостей хранения, распространения и переработки информации и их оценок на основе чувства меры и статистических моделей (рис. 79). Совместное управление структурным и бесструктурным способом мы рассмотрим далее.
Яркий пример бесструктурного управления — автобус без кондуктора с кассами.
Цель управления:
- взимание платы за проезд,
- оповещение об остановках.
— всё это ложится на плечи пассажиров, поскольку в большинстве случаев трансляция в автобусах не работает, кроме того, водителю просто не следует отвлекаться от управления машиной: продавать билеты и объявлять остановки — помеха его работе.
Концепция управления включает в себя:
- и консультации пассажиров о том, где им надо выйти.
ð Приструктурном управлении:ОНА же — обязанность кондуктора;
ð При бесструктурном управлении: их исполняет вся совокупность пассажиров автобуса, на основе информации их памяти.
Этот пример показывает, что одна и та же цель управления может быть осуществлена:
Ø СТРУКТУРНЫМ (кондуктор, хоть и один, но всё же структура)
Ø и БЕССТРУКТУРНЫМ СПОСОБОМ.
Здесь же виден и СУБЪЕКТИВИЗМв оценках качества управления, достигаемых при каждом из способов:
Ø Если вы хотите, чтобы максимальный процент пассажиров ехал с билетами и никто не ошибся в остановке, то кондуктор лучше.
Ø Если же вы смотрите на всю систему общественного городского транспорта с точки зрения хозяина государства-суперконцерна (в этом качестве может пребывать только концептуально властный народ), то печатать и распространять билеты — вредная растрата какой-то части общественного фонда рабочего времени и природных ресурсов, поскольку отпечатанный и тут же выброшенный билет не удовлетворяет ни чьих личных потребностей ни в пище, ни в одежде, ни в жилье, ни в Знании — ни в чём, чего так не хватает людям, но зато при их производстве и распространении изводится рабочее время, лес, энергия, замусоривается среда обитания.
Современные прокатные станы предъявляют ойень жесткие требования К электроприводу в части обеспечения требуемого режима работы Эти Требования выполняются при помощи замкнутых систем автоматического управления, которые пришли на смену разомкнутым системам управления. _
Разомкнутые системы управления характеризуются тем, что в них задается необходимое значение регулируемой величины, но в процессе работы значение регулируемой величины не контролируется и система не реагирует на отклонение регулируемой величины от заданного значения. Другими словами, в разомкнутых системах управления выходная величина не сравнивается с входным сигналом, т. е, система не имеет обратной связи.
В замкнутых системах производится непрерывный контроль выходной величины и система управления при помощи цепи обратной связи реагирует на отклонение выходного сигнала от заданной величины. ,
Цець обратной связи образуется тем, что сигнал берется" с выхода участка системы управления (выходная величина) и подается на какой-либо предыдущий элемент основной цепр прохождения сигнала,
Наибольшее распространение в металлургических электроприводах находит замкнутая система с отрицательной обратной связью, в которой выходная ве-
Личина сравнивается с входным сигналом и для управления выходной величиной используется рассогласование (ошибка) как разность между задающим (входным) сигналом и некоторой функцией регулируемой (выходной) величины, т е замкнутая система регулирования, работающая по отклонению регулируемой величины.
Действительное рассогласование усиливается в регуляторах, и исполни тельное устройство с определенной степенью точности приводит регулируемую величину в соответствие с задающим сигналом
Статические и динамические свойства таких систем определяются законом регулирования, под которым понимается вид зависимости, связывающей регулирующее воздействие (выходная величина регулятора) с ошибкой регулирования На рис 4, 6 приведена упрощенная структурная схема замкнутой системы управления двигателем Многие приводы обеспечивают косвенное регулирование скорости двигателя по величине напряжения, подводимого к якорю Поэтому регулируемой величиной является напряжение Ег, которое при помощи потен-
Рис 4 Структурная схема разомкнутой (а) и замкнутой (б) систем управле ния _
вдометра П преобразуется в напряжение Ur и сравнивается с задающим (входном) сигналом U0, определяющим требуемое значение скорости двигателя. Рассогласование (ошибка) AU = U0 — Ur через регулятор У обеспечивает на выходе генератора Г требуемое значение напряжения £г
Задачей замкнутых систем автоматического регулирования является под держание регулируемой (выходной) величины в заданном отношении к входному сигналу. Это соотношение нарушается во время переходного режима, возникающего под действием возмущающих сил
Различают следующие виды систем автоматического регулирования
1. Системы автоматической стабилизации, в которых регулируемая величина должна оставаться неизменной (в соответствии с неизменным входным сигналом), независимо от изменения возмущающих сил
2. Системы программного регулирования, в которых регулируемая величина, изменяется по заранее известной программе во времени (в соответствии с изменением во времени входного сигнала по заранее известной программе)
3. Следящие системы, в которых заданное значение регулируемой величины зависит от значения другой (входной) величины процесса, закон изменения которой заранее не известен
В автоматизированном электроприводе прокатного производства широкое применение получили системы автоматической стабилизации, которые делятся на статические и астатические системы автоматического регулирования
Статическими системами автоматического регулирования называются такие, в которых регулирующее воздействие пропорционально ошибке регулирования, Т. е. регулирующее воздействие при изменении возмущающей силы (нагрузки)
в установившемся режиКіб не остается кеизменныМ, а изменяется в соответствий с изменением возмущающей силы.
Астатическими системами автоматического регулирования называются такие, в которых регулирующее воздействие пропорционально интегралу от ошибки регулирования. Состояние равновесия (установившийся режим работы) - в таких системах может наступить только при отсутствии регулирующего воздействия, т. е. при отсутствии ошибки регулирования. Поэтому в астатических системах при установившемся режиме работы значение регулируемой величины всегда равно заданному значению независимо от значения возмущений. Применение астатических регуляторов часто затруднено вследствие замедленного их действия и невозможности обеспечить в ряде случаев устойчивость при регулировании.
Системы, которые после прекращения в них действия возмущающих сил со временем приходят к установившемуся состоянию, называются устойчивыми.
Системы, в которых не восстанавливается устновившееся состояние, а при отклонении от него в них возникают колебания с возрастающей амплитудой или монотонное движение в направлении удаления от установившегося состояния, называются неустойчивыми.
Замкнутая система-регулирования должна обеспечивать изменение регулируемой величины только при наличии определенного типа входных сигналов, на другие типы сигналов система не реагирует или реагирует незначительно, т. е. она должна обеспечивать устойчивую работу при помехах.
Обратная связь является важнейшим средством систем автоматического управления сложными объектами. Если обратная связь действует как при установившемся режиме работы системы, так и при переходном режиме, она называется жесткой обратной связью. Если обратная связь действует только в переходном режиме, она называется гибкой обратной связью.
Когда при увеличении выходной величины сигнал обратной связи уменьшает входной сигнал элемента, на который подается обратная связь, тогда такая обратная связь называется отрицательной. Она приводит к снижению передаточного коэффициента соответствующего участка системы управления и обеспе - •чнвает стабилизацию работы системы. Если при увеличении выходной величины сигнал обратной связи увеличивает входной сигнал элементарна который подается обратная связь, такая обратная связь называется положительной. Положительная обратная связь используется обычно для увеличения передаточного коэффициента соответствующего участка или элемента системы управления.
Для нахождения оптимального варианта замкнутой системы регулирования важно иметь простые методы синтеза и анализа системы, исключающие трудоемкие математические исследования. Современные методы анализа и синтеза систем «регулирования позволяют находить такие решения при условии хорошего изучения физических основ систем автоматического регулирования.
В подавляющем большинстве случаев объекты (процессы), с которыми мы имеем дело в жизни, не обладают свойством самоуправления в желательном для нас режиме. Соответственно этому обстоятельству мы и оказываемся перед необходимостью решать те или иные задачи управления. Решение их состоит в том, чтобы:
- либо выявить в объекте (процессе) некую систему управления и настроить её на управление объектом (процессом) в желательном для нас режиме;
- либо построить систему управления и связать её с объектом (процессом), управлять которым мы намереваемся.

Назначение системы управления (как компоненты замкнутой системы) — вырабатывать управляющий сигнал и направлять его в объект и среду по прямым связям. Понятно, что система управления должна соответствовать как вектору целей управления, так и объекту управления и воздействию среды на него.
В самом общем смысле управление и отображение — всегда взаимная вложенность понятий, выражающих эти процессы, и самих объективных процессов, протекающих в Объективной реальности. Управление — информационно-алгоритмический процесс — является отображением: из объекта и среды, окружающей объект управления, в систему управления объектом — обратные связи; и из системы управления объектом в объект и среду — прямые связи. Прямые связи подразделяются на внутренние и внешние: локализованные в пределах объекта и системы управления им — внутренние прямые связи; уходящие из системы управления и объекта во внешнюю среду — внешние прямые связи.
Аналогичным образом на внешние и внутренние подразделяются и обратные связи: те, по которым поступает информация о состоянии среды, положении объекта в ней, — внешние обратные связи; а те, по которым поступает информация о состоянии элементов объекта и системы управления им, — внутренние обратные связи.
В прошлых редакциях ДОТУ нашёл выражение расширительный подход, однако он не был пояснён, что у некоторой части читателей (особенно знакомых с какими-то техническими версиями теорий управления) вызывало вопросы.
В настоящей редакции мы сохраняем расширительный подход к толкованию упомянутых терминов, и потому в контексте ДОТУ следует принять определения прямых и обратных связей с подразделением их на внешние (уходящие в средý) и внутренние (локализованные в пределах объекта управления и системы управления) так, как они даны ранее.
- для прямых связей — на основе соотнесения мощности управляющего воздействия на объект или среду, порождаемого системой управления, с собственными характеристиками объекта управления (смотря по обстоятельствам, так в случае управления движением в смысле теоретической механики это может быть соотнесение сил управляющего воздействия с массой, с моментами инерции, с характеристиками сил и моментов сопротивления движению);
- для обратных связей — на основе соотнесения мощности управляющего воздействия, порождаемого системой управления, с параметрами, характеризующими отклонение объекта от заданного режима и параметрами, характеризующими воздействие среды на объект, реакцией на которые является вырабатываемое системой управление.
Примером замкнутой системы является — автомобиль с водителем (рис. 84). Автомобиль — объект управления. Водитель, ещё более точно, — его алгоритмика психики, — система управления. Обратные связи замкнуты через зрение, слух, осязание и вестибулярный аппарат водителя, а прямые — через его руки и ноги, воздействующие на исполнительные органы: руль, педали, рукоятку переключения передач, тумблеры и кнопки. Кроме того, иерархии замкнутых контуров прямых и обратных связей имеются в системах и устройствах автомобиля и в самом человеке.

Самоуправляющийся объект, в котором не удаётся выделить систему управления им, также представляет собой замкнутую систему, поскольку в нём самом имеет место кольцевая замкнутость прямого и обратного отображений в некоторой иерархии контуров циркуляции информации.
Примером такого рода самоуправляющихся объектов с нелокализуемой системой управления является сливной бачок унитаза с поплавковым регулятором уровня воды. Система управления не локализована в том смысле, что её невозможно отличить от самого объекта, как возможно отличить водителя от автомобиля или блок автопилота от самолёта в целом. Кроме того, и методом изъятия узлов в замкнутой системе с нелокализованной системой управления невозможно достичь ничего, кроме как привести её в аварийное или в принципе неработоспособное состояние;
в замкнутых системах с локализованной системой управления изъятие системы управления не нарушает в принципе работоспособности объекта управления.
Управляющий сигнал через прямые связи подаётся на исполнительные органы (и в окружающую среду при необходимости), что и обеспечивает управляющее воздействие на объект. По цепям обратных связей в систему управления в процессе управления подаётся информация о состоянии окружающей среды, объекта, исполнительных органов, самой системы управления (рис. 85, 86, 87, 88, 89).






То есть управление — это единая упорядоченная совокупность разнокачественных действий, осуществляемых элементами, образующими замкнутую систему, представляющую собой иерархию контуров циркуляции и преобразований информации в процессе осуществления концепции управления, образованную частными концепциями управления (целевыми функциями) в их совокупности.

Управление — целостная функция: целостная в том смысле, что изъятие из неё тех или иных этапов делает данное управление невозможным, т.е. концепцию неосуществимой, а цели недостижимыми.
Читайте также: