
Способы движения машинно тракторных агрегатов реферат
Обновлено: 08.07.2024
Для выбора оптимального способа движения агрегата при его движении с петлевыми поворотами и с беспетлевыми определяют коэффициент рабочих ходов.
Коэффициент использования рабочих ходов φ показывает их долю по отношению ко всему пути, который прошел агрегат на участке:
где: - путь рабочих ходов на участке, м;
- путь холостых ходов на участке, м.
Алгоритм расчета коэффициентов использования рабочих ходов для движения с петлевыми и беспетлевыми поворотами следующий;
3.4.1. Определяют оптимальную ширину загона Сопт для загоновых способов
движения по формуле:
где: R - радиус поворота агрегата, м;
L - дайна поля (по заданию), м;
Кс - коэффициент пропорциональности, зависящий от способа
- Кс = 2 - при петлевых способах движения;
- Кc = 3 - при беспетлевых способах движения.
3.4.2. Полученную Сопт округляют в большую сторону, до значений кратных ширине захвата Вр т. е. до = целое · число
При Кс = 2 - петлевой способ движения;
При Кс = 3 - безпетлевой способ движения;
3.4.3. Определяют число холостых ходов nхх агрегата при работе в загоне:
При Кс = 2 - петлевой способ движения;
При Кс = 3 - безпетлевой способ движения;
3.4.4. Определяют длину холостого хода lхх.
- для петлевого грушевидного поворота равна lхх.
lхх = 6R + 2е=6*3,4+2*10,8=42 (21)
- для безпетлевого поворота lхх.
lхх = 3,14R + 2е=3,14*3,4+2*10,8=32,276 (22)
где: e =LKm+LKC+LKM - длина выезда агрегата, равная сумме кинематических длин трактора LKm сцепки LKC и сельхозмашины LKM.
3.4.5. Определяют суммарную величину холостых ходов для петлевых и
беспетлевых поворотов (одинакова для обоих видов):
- для петлевого способа:
- для безпетлевого способа:
3.4.6. Определяют количество рабочих ходов nрх для обоих видов ходов:
- для петлевого способа:
- для безпетлевого способа:
3.4.7. Определяют ширину поворотной полосы:
-для петлевых поворотов:
-для безпетлевых поворотов:
полученную Ер (для обоих видов движения) округлить в большую сторону до значений кратных ширине захвата Вр, т. е.:
целое · число (27)
-для петлевых поворотов:
-для безпетлевых поворотов:
3.4.8. Определяют длину рабочего хода lрх для обоих способов:
Lрх = L – 2 · Eр (28)
где: L - длина поля по заданию, м.
-для петлевых поворотов:
-для безпетлевых поворотов:
3.4.9. Определяют суммарную длину рабочих ходов Lpx для обоих способов:
-для петлевых поворотов:
-для безпетлевых поворотов:
3.4.10. Определяют коэффициент использования рабочих ходов φ. Для этогозначения и подставляют в формулу (18).
Выбирают способ, который обеспечивает меньшую длину холостого хода агрегата и соответственно больший коэффициент использования рабочих ходов φ.
-для петлевых поворотов:
-для безпетлевых поворотов:
Окончательно способ движения выбирают исходя из:
- качества выполнения операции;
- кинематических параметров агрегата и поля.
Вывод: В результате полученных расчетов для данного агрегата наиболее подходящий способ движения безпетлевой и петлевой – перекрытием. Эти способы обеспечивает меньшею длину холостого хода и большей коэффициент использования рабочих ходов.
Рис. Способ движения агрегата перекрытием.
3.5. Структура операционной карты
Операционно-технологическая карта - разрабатывается для технологической операции, полученной вами по заданию.
Машинно-тракторный агрегат в процессе работы перемещается по полю, проходя за смену значительные расстояния, измеряемые часто многими десятками километров. Пройденный агрегатом путь состоит из рабочих ходов и холостых поворотов с выключенными рабочими органами. При этом желательно, чтобы холостой путь агрегата и соответствующие потери времени смены, а также непроизводительный расход топлива были как можно меньше.
Успешное решение такой актуальной задачи зависит от конструктивных особенностей МТА, его маневренности, выбранного способа движения и соответствующей подготовки полей.
Под способом движения МТА подразумевается закономерность его перемещения по полю в процессе работы. Эта закономерность в основном определяется его геометрическими характеристиками: формой траектории; радиусом и видом поворота и т. д.
Подготовка полей в зависимости от выбранного способа движения предусматривает комплекс операций по разбивке поля на загоны требуемой формы и размера, обеспечивающие высокое качество технологического процесса и высокую производительность при возможно меньших затратах ресурсов.
Таким образом, основной задачей кинематики агрегатов является обоснование методов выбора эффективных способов движения МТА и подготовки полей с учетом следующих основных требований: высокое качество выполняемой работы; высокая производительность при возможно меньших затратах топлива и других ресурсов на единицу выполненной работы; обеспечение безопасных условий работы для механизаторов; наименьшее отрицательное воздействие на окружающую среду (почву, культурные растения и т. д.).
От уровня удовлетворения указанных требований значительно зависит реализация высоких потенциальных возможностей МТА, заложенных в процессе их оптимального комплектования.
При успешном решении задач кинематики агрегатов будет иметь место эффект сложения показателей ресурсосбережения, заложенных как при комплектовании МТА, так и при выборе способа его движения. В противном случае преимущества оптимальных агрегатов могут быть утеряны частично или полностью как по производительности, так и по ресурсосбережению, что свидетельствует об актуальности рассматриваемых вопросов.
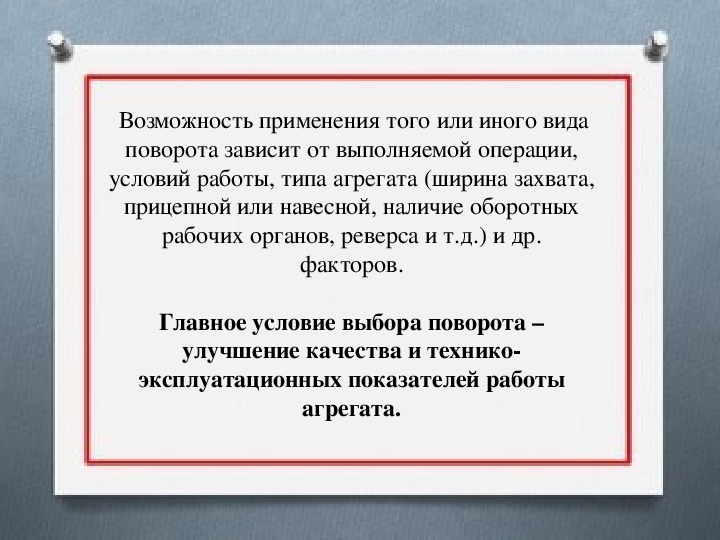
Основные кинематические характеристики МТА зависят от конструктивных особенностей трактора, сцепки и рабочих машин. К таким характеристикам агрегата относятся: кинематический центр; кинематическая длина; длина выезда; кинематическая ширина; радиус и центр поворота; ширина колеи и продольная база трактора; ширина захвата.
Под кинематическим центром агрегата (рис. 3) подразумевается условная геометрическая точка на плоскости движения (поверхности поля), траектория которой рассматривается как траектория МТА в процессе движения по полю. Такое упрощение приемлемо в связи с тем, что геометрические размеры МТА неизмеримо меньше размеров обрабатываемого участка или загона. Расположение центра агрегата зависит от типа трактора.
Для агрегатов, составляемых на базе колесных тракторов с жесткой рамой, точка центра определяется как проекция середины задней ведущей оси трактора на плоскость движения (рис. 3, а). У агрегатов с тракторами, имеющими шарнирно-сочлененную раму, за центр агрегата принимается проекция на плоскость движения центра шарнира (рис. 3, б). Для МТА с гусеничными тракторами центр агрегата соответствует проекции на плоскость движения точки пересечения диагоналей, проведенных через наружные края гусениц (рис. 3, в).
Рисунок 3. Основные схемы расположения центра агрегата
При решении задач кинематики траектория центра агрегата условно принимается как траектория всего агрегата.
Кинематической длиной агрегата называется проекция расстояния между центром агрегата и линией, перпендикулярной продольной оси трактора и проходящей через наиболее удаленные по ходу МТА точки рабочих органов машин при прямолинейном движении.
Основные кинематические характеристики рабочего участка: общая и рабочая длины гона; ширина загона; ширина поворотной полосы; длина выезда (рис. 4).

Рисунок 4. Основные кинематические характеристики рабочего участка
Под рабочим участком подразумевается часть поля, отведенная для выполнения определенной сельскохозяйственной операции. Загон представляет собой часть рабочего участка прямоугольной формы, отведенную для работы на ней одного или группы агрегатов.
Длина гона часто определяется размерами поля, а ширина загона — шириной захвата и способом движения МТА. Ширина поворотной полосы зависит от ширины захвата и условий безопасного поворота агрегата. Рабочая длина гона . По соображениям удобства в качестве расчетной используется общая длина гона .
Движение МТА в процессе работы часто состоит из прямолинейных рабочих ходов вдоль гона и поворотов на конце гона. При этом в зависимости от типа агрегата повороты могут совершаться как с включенными, так и выключенными рабочими органами (во втором случае происходит холостой поворот).
С учетом большого влияния вида поворота на показатели работы МТА необходимо при его выборе учитывать следующие основные требования: высокое качество выполняемой работы; возможно меньшая ширина поворотной полосы; высокая производительность МТА при наименьших потерях времени, топлива и других ресурсов; обеспечение безопасных условий работы; возможно меньшее отрицательное воздействие на окружающую среду, особенно на почву.
Рисунок 5. Основные виды поворотов МТА: беспетлевые – круговой (1); с
прямолинейным участком (2); угловой (3); петлевые – закрытая петля (4);
грушевидный (5); односторонний (6); грибовидный.
Все повороты основных видов для удобства изучения делят на две группы: петлевые и беспетлевые. В пределах каждой группы дополнительно различают способы поворота по углу поворота МТА.
Важнейшие кинематические характеристики всех поворотов: длина , время , радиус , требуемая ширина поворотной полосы.
Под способом движения подразумевается закономерность движения агрегата по полю в процессе работы.
Способы движения агрегатов классифицируют по следующим основным признакам: по характеру разбивки поля на загоны; по числу одновременно обрабатываемых загонов; по направлению рабочих ходов; по виду поворотов. Используют и такие классификационные признаки, как направление поворотов МТА и др.; однако они не имеют существенного значения для решения основных задач кинематики агрегатов.
По характеру разбивки поля на загоны различают загонные (поле разбивают на отдельные загоны) и беззагонные (поле на загоны не разбивают) способы движения. В зависимости от числа одновременно обрабатываемых загонов возможны одно- и многозагонные способы.
Для расчета количественных показателей холостого хода МТА основное значение имеют классификации способов движения по направлению рабочих ходов и по виду поворотов.
Все способы движения МТА по направлению рабочих ходов делят на три группы: гоновые, круговые, диагональные. При гоновых способах движения агрегат совершает рабочие ходы параллельно одной или двум сторонам загона с холостыми поворотами на обоих его концах.
При круговом способе движении МТА рабочие ходы совершаются вдоль всех четырех сторон загона без выключения рабочих органов, за исключением центра загона, где неизбежны несколько холостых петлевых поворотов. Различают круговые способы движения от периферии к центру и, наоборот, от центра к периферии.
При диагональном способе движения рабочие ходы агрегата совершаются под острым или тупым углом к сторонам загона. При этом обработка загона может начинаться как от угла, так и от диагонали поочередно с одной и другой стороны.
На основе различных сочетаний гоновых способов движения могут быть получены комбинированные способы. Способ считают петлевым, если в процессе работы на загоне МТА совершает хотя бы один петлевой поворот. При отсутствии петлевых поворотов способ движения МТА считается беспетлевым.
Один из важнейших способов уменьшения непроизводительных потерь времени и топлива при холостом ходе МТА — предварительная разбивка полей на загоны оптимальной ширины с одновременной отбивкой поворотных полос. Для этой цели желательно иметь специальные агрегаты сравнительно небольшой мощности, обеспечивающие прокладку прямолинейных борозд и отбивку загонов прямоугольной формы.
Указанные агрегаты должны выполнять также другие вспомогательные операции, связанные с заравниванием свальных гребней и развальных борозд, обработкой поворотных полос и т. д. При этом более мощные МТА освобождаются от выполнения вспомогательных операций и их производительность существенно возрастает при более высоком качестве работы. Важное значение имеет также придание полям прямоугольной формы при одновременном удалении препятствий (камней, кустов деревьев, столбов и т.д.).
Сельское хозяйство, а именно земледелие – древнейшая и очень сложная сфера человеческой деятельности, возникшая и сформировавшаяся за тысячелетия. Появление земледелия было крупнейшим событием в развитии цивилизации. Оно позволило перейти от кочевого и создать основу для совершенного нового оседлого образа жизни и труда человека. Основная задача земледелия – обеспечение населения продуктами питания, перерабатывающую промышленность сырьем и животноводство кормами. Для расширения этих задач необходимо обеспечить дальнейший рост сельскохозяйственного производства, увеличение валового сбора сельскохозяйственной продукции, всемирное повышение земледелия как отрасли. Целью урока является: Изучение способов движения и виды поворотов МТА. Машинно-тракторный агрегат в процессе работы перемещается по полю, проходя за смену значительные расстояния, измеряемые часто многими десятками километров. Пройденный агрегатом путь состоит из рабочих ходов и холостых поворотов с выключенными рабочими органами. При этом желательно, чтобы холостой путь агрегата и соответствующие потери времени смены, а также непроизводительный расход топлива были как можно меньше.
Презентация по технологии механизированных работ на тему "Способы движения МТА и показатели работ".
Способы движения МТА и показатели работ. Тема: Вопросы лекции 1.Значение рациональных способов движения агрегатов. 2.Кинематические характеристики агрегата и рабочего участка. 3. Основные виды поворотов МТА. 4. Способы движения МТА.
Презентация по технологии механизированных работ на тему "Способы движения МТА и показатели работ".
Презентация по технологии механизированных работ на тему "Способы движения МТА и показатели работ".
Под способом движения агрегата подразумевают закономерность его перемещения по полю при выполнении технологического процесса. Эта закономерность характеризуется геометрической формой траектории при рабочем ходе (прямолинейная, криволинейная и т. д.), а также радиусом и видом поворота. Задача при этом состоит в том, чтобы холостой путь агрегата и соответствующие потери времени, топлива и других ресурсов были как можно меньше при высоком качестве технологического процесса
Презентация по технологии механизированных работ на тему "Способы движения МТА и показатели работ".
Презентация по технологии механизированных работ на тему "Способы движения МТА и показатели работ".
Основной задачей кинематики агрегатов является обоснование методов выбора рациональных способов движения МТА и воздействие на окружающую среду (почву, культурные растения и т. д.). подготовки полей с учетом следующих основных требований: высокое качество выполнения работы; высокая производительность при возможно меньшем расходе топлива и других ресурсов на единицу выполняемой работы; обеспечение безопасных условий работы для механизаторов и всего агрегата; наименьшее отрицательное
Презентация по технологии механизированных работ на тему "Способы движения МТА и показатели работ".
Презентация по технологии механизированных работ на тему "Способы движения МТА и показатели работ".
Повороты — наиболее сложный элемент кинематики агрегатов, поэтому при выборе вида поворота необходимо учитывать высокое качество выполняемой работы; возможно меньшую ширину поворотной полосы и длину холостого пути агрегата; меньшие потери времени и топлива на холостые повороты; обеспечение безопасных условий работы; меньшее отрицательное воздействие на окружающую среду, особенно на почву. Все виды поворотов МТА для удобства изучения делят на петлевые и беспетлевые, а также по углу поворота на 90 и 180°. Наиболее широко на практике применяют повороты МТА, представленные на рисунке. Повороты а, б, д, е, ж, з совершаются на 180°, а в и г — на 90°.
Презентация по технологии механизированных работ на тему "Способы движения МТА и показатели работ".

Основные виды поворотов МТА Беспетлевые: о —круговой; б—с прямолинейным участком; в —угловой; петлевые: г — закрытая петля; д — грушевидный; е — односторонний; ж и з — грибовидные с открытой и закрытой петлей
Презентация по технологии механизированных работ на тему "Способы движения МТА и показатели работ".
Преимущества и недостатки: 1. Наличие петли той или иной формы удлиняет траекторию поворота, а в ряде случаев значительно увеличивает и ширину поворотной полосы (грушевидный, восьмёркообразный, петлевой с открытой петлёй). 2. Отсутствие петли той или иной формы сокращает длину беспетлевого поворота по сравнению с петлевым и значительно уменьшает ширину поворотной полосы (беспетлевой с прямолинейным участком, беспетлевой дугообразный). 3. Петлевые повороты с задним ходом применимы только для движения агрегатов с навесными машинами и хотя для них не требуется широкая поворотная полоса, время поворота tП увеличивается вследствие двух дополнительных остановок трактора для переключения движения с переднего хода движения на задний и наоборот.
Презентация по технологии механизированных работ на тему "Способы движения МТА и показатели работ".
Возможность применения того или иного вида поворота зависит от выполняемой операции, условий работы, типа агрегата (ширина захвата, прицепной или навесной, наличие оборотных рабочих органов, реверса и т.д.) и др. факторов. Главное условие выбора поворота – улучшение качества и технико эксплуатационных показателей работы агрегата.
Машинно-тракторный агрегат в процессе работы перемещается по полю, проходя за смену значительные расстояния, измеряемые часто многими десятками километров. Пройденный агрегатом путь состоит из рабочих ходов и холостых поворотов с выключенными рабочими органами. При этом желательно, чтобы холостой путь агрегата и соответствующие потери времени смены, а также непроизводительный расход топлива были как можно меньше.
Успешное решение такой актуальной задачи зависит от конструктивных особенностей МТА, его маневренности, выбранного способа движения и соответствующей подготовки полей.
Под способом движения МТА подразумевается закономерность его перемещения по полю в процессе работы. Эта закономерность в основном определяется его геометрическими характеристиками: формой траектории; радиусом и видом поворота и т. д.
Подготовка полей в зависимости от выбранного способа движения предусматривает комплекс операций по разбивке поля на загоны требуемой формы и размера, обеспечивающие высокое качество технологического процесса и высокую производительность при возможно меньших затратах ресурсов.
Таким образом, основной задачей кинематики агрегатов является обоснование методов выбора эффективных способов движения МТА и подготовки полей с учетом следующих основных требований: высокое качество выполняемой работы; высокая производительность при возможно меньших затратах топлива и других ресурсов на единицу выполненной работы; обеспечение безопасных условий работы для механизаторов; наименьшее отрицательное воздействие на окружающую среду (почву, культурные растения и т. д.).
От уровня удовлетворения указанных требований значительно зависит реализация высоких потенциальных возможностей МТА, заложенных в процессе их оптимального комплектования.
При успешном решении задач кинематики агрегатов будет иметь место эффект сложения показателей ресурсосбережения, заложенных как при комплектовании МТА, так и при выборе способа его движения. В противном случае преимущества оптимальных агрегатов могут быть утеряны частично или полностью как по производительности, так и по ресурсосбережению, что свидетельствует об актуальности рассматриваемых вопросов.
Основные кинематические характеристики МТА зависят от конструктивных особенностей трактора, сцепки и рабочих машин. К таким характеристикам агрегата относятся: кинематический центр; кинематическая длина; длина выезда; кинематическая ширина; радиус и центр поворота; ширина колеи и продольная база трактора; ширина захвата.
Под кинематическим центром агрегата (рис. 3) подразумевается условная геометрическая точка на плоскости движения (поверхности поля), траектория которой рассматривается как траектория МТА в процессе движения по полю. Такое упрощение приемлемо в связи с тем, что геометрические размеры МТА неизмеримо меньше размеров обрабатываемого участка или загона. Расположение центра агрегата зависит от типа трактора.
Для агрегатов, составляемых на базе колесных тракторов с жесткой рамой, точка центра определяется как проекция середины задней ведущей оси трактора на плоскость движения (рис. 3, а). У агрегатов с тракторами, имеющими шарнирно-сочлененную раму, за центр агрегата принимается проекция на плоскость движения центра шарнира (рис. 3, б). Для МТА с гусеничными тракторами центр агрегата соответствует проекции на плоскость движения точки пересечения диагоналей, проведенных через наружные края гусениц (рис. 3, в).

Движение машинно-тракторных агрегатов на загонах
При выполнении технологических операций машинно-тракторные агрегаты проходят большие расстояния. Например, при вспашке 100 га трактором ДТ-75 с плугом ПН-4-35 агрегат перемещается на пути 700— 800 км, из них до 60 км вхолостую (в зависимости от конфигурации загонов). При этом его движение на значительной части пути повторяется. Порядок циклично повторяющихся ходов агрегата называется способом движения.
На каждой технологической операции может быть несколько различных способов движения. Из них выбирают тот, который при данном агрегате и конкретных эксплуатационных условиях дает наилучшие показатели по качеству работы. При одинаковом же качестве принимают такой, при котором обеспечивается сокращение холостых заездов, снижаются затраты времени, увеличивается производительность агрегата, уменьшается расход топлива.
На основной части гона агрегат совершает рабочий ход под нагрузкой по траектории, близкой к прямолинейной. На конце гона агрегат поворачивает по криволинейной траектории и, как правило, вхолостую.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Всякий лишний километр пройденного агрегатом холостого хода является непроизводительной тратой времени и топлива.
Холостые ходы агрегата можно разделить на три группы:
а) холостые заезды и повороты на концах гонов;
б) дополнительные проезды по полю с неполной шириной захвата, когда часть машин движется вхолостую;
в) холостые переезды с одного поля на другое или на стан бригады.
Две первые группы холостых ходов, связанные непосредственно с данной технологической операцией, зависят от формы загонов и принятого способа движения.
Коэффициент рабочих ходов характеризует степень использования на полезную работу общего пути агрегата на загоне. Чем больше коэффициент, тем меньше доля холостого пути агрегата. Этот коэффициент оценивает правильность выбора способа движения и ширины загона при определенной ее длине. Наибольшему значению соответствует оптимальная ширина загона, т. е. такая ширина, при которой агрегат при обработке всего поля имеет наименьшую длину холостых заездов (с учетом заездов при разбивке поля на загоны).
Вторая группа холостых ходов характеризует точность разбивки поля на загоны и качество вождения агрегата.
Для машинно-тракторных агрегатов характерно сложное движение по полю. Каждая машина и ее рабочие органы движутся по различным траекториям, отличным друг от друга. Чтобы упростить изучение закономерностей движения агрегатов, принято характеризовать это движение траекторией одной точки, названной условным центром агрегата. Для гусеничного трактора этот центр находится на пересечении продольной его оси с линией, соединяющей середины опорных поверхностей гусениц.
К другим характеристикам агрегата, влияющим на его движение по загону, относятся:
а) конструктивная ширина агрегата
б) — расстояние между его крайними точками по ширине;
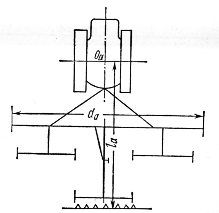
Рис. 1. Ширина и длина агрегата.
Эти характеристики нужны для определения длины выезда агрегата до начала поворота и ширины поворотной полосы. Очень важное значение при этом имеет наименьший допустимый радиус поворота агрегата, т. е. такой, при движении с которым все колеса машин перемещаются без бокового сдвига (или проскальзывания), а также отсутствует опасное сближение машин, входящих в агрегат. Чем меньше этот радиус, тем более маневренным оказывается агрегат на повороте, меньше ширина поворотной полосы и длина холостых заездов.
Величина радиуса поворота зависит от ширины и длины агрегата, а также от скорости движения. Ниже приведены примерные значения радиуса поворота агрегата в зависимости от ширины захвата при скорости движения 5 км/ч.
Значения радиусов поворота агрегатов при других скоростях движения можно получить умножением радиусов поворота (при скорости 5 км/ч) на соответствующие коэффициенты.
Применение самоустанавливающихся колес на сцепке и машинах, входящих в агрегат, позволяет значительно уменьшить радиус поворота и ширину поворотной полосы.
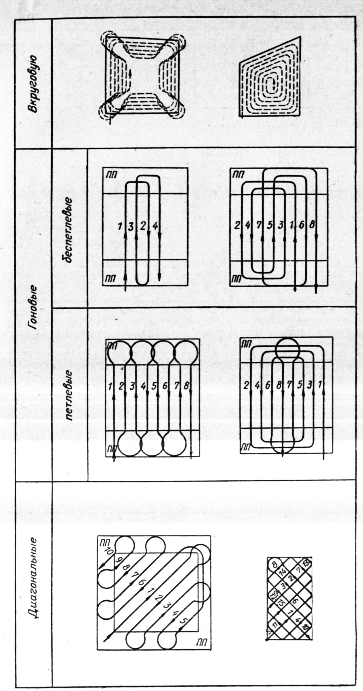
Рис. 2. Схема основных групп способов движения агрегатов.
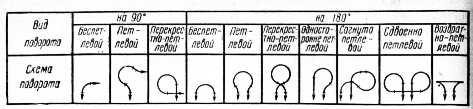
Рис. 3. Виды поворотов агрегата.
Способы движения агрегатов могут быть классифицированы по ряду признаков:
а) по направлению рабочих ходов агрегатов;
б) по организации территории (загонный, беззагонный);
в) по направлению поворотов агрегата (правоповоротный, левоповоротный, комбинированный);
г) — по схеме обработки рабочего участка (однозагонный, двухзагонный, многозагонный):
д) по способу выполнения поворотов (беспетлевой, петлевой, с задним ходом агрегата, игольчатый, реверсивный и др.).
Наибольшее распространение получила классификация способов движения агрегатов по первому признаку — по направлению рабочих ходов, где выделяют три главные группы способов движения агрегатов.
1. Движение вкруговую; рабочие ходы агрегата направлены вдоль всех сторон участка, на котором работает агрегат.
2. Тоновое движение; рабочие ходы агрегата направлены вдоль одной или двух сторон обрабатываемого участка (чаще всего — вдоль длинной стороны).
3. Движение по диагонали. В этом случае рабочие ходы осуществляются под углом к сторонам участка.
Схемы основных групп способов движения представлены на рисунке 35. Известно большое количество поворотов агрегатов. Наиболее распространенные из них приведены на рисунке 36.
Подготовка полей и загонов. Подготовка полей и загонов преследует цель создать наилучшие условия для организации и проведения работ с высоким качеством и производительностью. До разбивки полей на загоны необходимо выбрать направление рабочих ходов агрегатов с учетом действия вредных ветров (суховеев), направления движения агрегатов на предыдущей и последующей операциях, а для районов, подверженных почвенной эрозии,— с учетом наиболее эффективной борьбы с ней. Эти вопросы определяются требованиями агротехники возделывания культур, поэтому разметку полей производя под непосредственным руководством агронома.
После определения направления движения агрегата выбирают ширину загона.
Ширину поворотной полосы устанавливают с учетом характеристик агрегата, скорости движения его на повороте и состояния почвы. С ростом скорости движения и снижением прочности почвенного покрова ухудшаются условия поворота, возрастает радиус поворота и увеличивается ширина поворотной полосы.
Учитывая необходимость обработки поворотных полос этим же агрегатом, их ширину принимают кратной захвату агрегата (с округлением в большую сторону).
После установления ширины загона и размера поворотной полосы приступают к разметке поля.
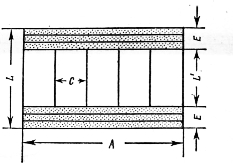
Рис. 4. Разбивка поля на загонки:
А — ширина поля; L — длина поля; С— ширина загонки; Е — ширина поворотной полосы; L — длина гона.
Наиболее удобная форма загона — прямоугольник. На поле неправильной формы намечают загоны прямоугольной или трапецевидной формы. Небольшие участки, оставшиеся после такой разметки, обрабатывают отдельно колесными тракторами.
При групповой работе агрегатов наиболее правильной является индивидуальная расстановка агрегатов по загонам в одном поле. Это позволяет контролировать качество и количество работы, выполненной каждым агрегатом в отдельности, устраняет затрату времени на объезд впереди идущего агрегата и облегчает организацию социалистического соревнования.
Читайте также: