
Система пч ад реферат
Обновлено: 05.07.2024
Наиболее простым, дешевым и надежным электрическим двигателем является асинхронный короткозамкнутый двигатель, поэтому его использование в регулируемом электроприводе представляет особый интерес. Как было установлено, возможности регулирования, аналогичные возможностям изменения напряжения на якоре двигателя постоянного тока с независимым возбуждением, в асинхронном электроприводе обеспечиваются путем изменения частоты напряжения и тока статорной обмотки. Для реализации этих возможностей необходимо осуществлять питание статорной обмотки двигателя от управляемого преобразователя частоты.
Регулирование частоты представляет собой технически более сложную задачу, чем регулирование выпрямленного напряжения, так как, как правило, требует дополнительных ступеней преобразования энергии.
Наибольшее число ступеней преобразования характерно для электромашинных преобразователей частоты. Для регулирования частоты вырабатываемого синхронным генератором напряжения необходимо регулировать его скорость. Для этой цели привод генератора необходимо осуществлять либо по системе Г-Д, либо по системе ТП-Д. Электромашинный преобразователь частоты содержит соответственно два преобразовательных агрегата: асинхронный двигатель, вращающий генератор постоянного тока, и двигатель постоянного тока, вращающий синхронный генератор с регулируемой скоростью. Электропривод с таким преобразователем частоты имеет пять ступеней преобразования энергии, увеличенные примерно в 5 раз массу, габариты и стоимость (по сравнению с нерегулируемым электроприводом), ухудшенный КПД, и его использование экономически нецелесообразно.
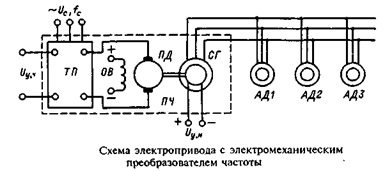
На рисунке приведена схема вентильно-электромашинного преобразователя частоты, в котором регулирование скорости синхронного генератора производится по системе ТП-Д. Здесь вместо электромашинного агрегата, вырабатывающего регулируемое напряжение постоянного тока, применен более экономичный тиристорный преобразователь. Однако и в этом случае преобразователь частоты содержит три ступени преобразования энергии, из них две - электромеханического преобразования. Схема непосредственного регулирования скорости по системе ТП-Д проще и дешевле, поэтому применение системы ПЧ-АД, показанной на рисунке, может иметь место только в специальных установках, например в случаях, когда двигатель постоянного тока не может быть применен для привода исполнительного механизма по техническим условиям.
В данной схеме присутствуют два канала управления: канал управления частотой (Uyч), воздействующий на скорость синхронного генератора СГ, и канал управления напряжением, воздействующий на возбуждение СГ(Uун).
Канал регулирования частоты имеет структуру системы ТП-Д (см. рис.) и обладает значительной инерционностью, обусловленной механической инерцией преобразовательного агрегата ПД-СГ. Канал регулирования напряжения также инерционен в связи с наличием электромагнитной инерции цепи возбуждения синхронного генератора. Поэтому как объект управления представленная на рисунке система обладает неблагоприятными свойствами.
Наименьшим числом ступеней преобразования энергии обладают вентильные преобразователи частоты Они содержат ступень преобразования переменного тока в постоянный и ступень инвертирования. Эти две ступени в самостоятельном виде присутствуют в преобразователях частоты со звеном постоянного тока В преобразователе частоты с непосредственной связью функции выпрямления и инвертирования совмещены в реверсивном преобразователе постоянного тока, выпрямленное напряжение или ток которого изменяются с требуемой частотой с помощью системы управления преобразователем. Как следствие, наиболее близкими к системе ТП-Д массогабаритными показателями обладает система ПЧ-АД с преобразователем с непосредственной связью, а система с преобразователями, содержащими ступень постоянного тока, уступает по этим показателям системе ТП-Д. Однако различия по мере совершенствования вентильных преобразователей частоты постепенно сокращаются, и существенные преимущества асинхронного двигателя определяют несомненную перспективность системы ПЧ-АД.
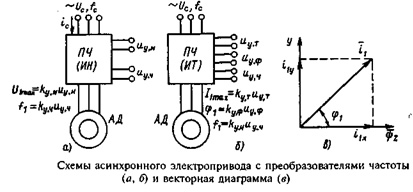
Известно, что вентильные преобразователи частоты могут обладать либо свойствами источника напряжения, либо свойствами источника тока. В первом случае наряду со входом управления частотой Uy.ч преобразователь имеет вход управления напряжением Uун (рис. a). В случае инвертора тока регулирование магнитного потока машины при регулировании частоты осуществляется по входу управления током Uут (рис. б).
Канал управления частотой может осуществлять либо дискретное, либо непрерывное формирование частоты напряжения и тока. При непрерывном формировании синусоидальных напряжений или токов заданной частоты его можно считать практически безынерционным. Канал управления напряжением или током воздействует на тиристорный преобразователь, и его быстродействие может оцениваться быстродействием этого управляемого преобразователя.
- Построение графиков статических характеристик для трех способов регулирования в зависимости от нагрузки.
- Исследование устойчивости САУ с помощью критериев устойчивости (критерий устойчивости Найквиста, критерий устойчивости Гурвица, критерий устойчивости Михайлова). Построение ЛАЧХ и ФЧХ. Определение запаса устойчивости системы.
- Построение графиков переходного процесса.
Исходные данные:
САУ переменного тока. Вариант №9.
U ф.с.м , В
nc , об / мин
Глава 1. Описание САУ частотно-регулируемого ЭП
Разработка автоматических систем состоит из следующих этапов: изучение управляемого объекта; определение его характеристик, параметров, условий работы и воздействий, которые он испытывает; формулирование требований, предъявляемых к системе; выбор функциональной схемы, разработка принципиальной схемы автоматической системы, выбор и расчет ее элементов и параметров на основе требований, предъявляемых к статическим свойствам системы; составление структурной схемы, характеризующей динамику системы; исследование устойчивости системы; выбор корректирующих устройств на основе требований, предъявляемых к динамическим свойствам системы (качество процесса управления).
Управление САУ возможно тремя способами:
1) Изменение модуля того или иного вектора;
2) Изменение модуля и аргумента;
3) Изменение проекции вектора на координатную ось.
1 – Скалярное управление;
2 – Полярное управление (модуль, фаза);
3 – Векторное управление (проекции на оси).
U / f - регулированием, или скалярным регулированием, скорости электропривода с асинхронным двигателем называют регулирование, при котором изменение скорости достигается путем воздействия на частоту напряжения на статоре при одновременном изменении модуля этого напряжения. При U / f – регулировании напряжение и ток рассматриваются как скалярные величины, т.е. используются модули этих величин.
При U / f – регулировании вид механической характеристики определяется тем, как соотносятся между собой частота и значение напряжения питания статора двигателя. Таким образом, частота и напряжение выступают как два управляющих воздействия, которые обычно регулируются совместно. Такой способ регулирования скорости АД называется частотным, а характер согласования напряжения и частоты – законом частотного регулирования.
В значительном числе случаев желаемым законом регулирования считается такой, при котором во всем диапазоне регулирования скорости поддерживается постоянство перегрузочной способности двигателя:


Системы скалярного управления применяются в ЭП с наибольшим диапазоном регулирования скорости, которые работают при малых изменениях нагрузки. На этом участке ошибка регулирования очень мала и она определяется сопротивлением ротора, и поэтому эти системы выполняются без обратных связей.
Различают три закона скалярного управления, выбор которого зависит от характера изменения нагрузки на валу при изменении скорости:
1. Регулирование при поддержании постоянного потокосцепления статора:
(за счет ),
где f – частота напряжения на статоре (Mкрит = const ).
2. Регулирование при постоянстве мощности:


3. Закон для вентиляторных нагрузок:


а) ТПЧ со звеном постоянного тока на основе АИН

Рис. 1 - Структура преобразователя частоты со звеном постоянного тока и управляемым выпрямителем
Преобразователь частоты включает в себя автономный инвертор напряжения (АИН ) с системой управления инвертора (СУИ )и управляемый выпрямитель (УВ ). На выходе предусмотрен конденсаторный фильтр (Сф ), предназначенный для сглаживания выпрямленного напряжения Ud .
В промышленных установках управляемый выпрямитель питается от сети переменного тока промышленной частоты 50 Гц. Управляющим воздействием для него является сигнал задания напряжения на входе системы управления выпрямителем (СУВ).
Наиболее распространенной схемой силовой части инвертора является трехфазная мостовая схема, состоящая из шести управляемых ключей, которые должны обладать двусторонней проводимостью, и поэтому выполнены на транзисторах, обеспечивающих протекание тока в прямом направлении от плюса напряжения Ud к минусу. Обратная проводимость обеспечивается включенными параллельно транзисторам диодами обратного тока. С их помощью создается цепь для протекания обратного тока в процессе коммутации транзисторов и в тормозном режиме двигателя.
б) Функциональная схема:

Рис. 2 - Функциональная схема ТПЧ на основе АИН
Исходные дифференциальные уравнение по закону Кирхгофа:



в) Структурная схема:
Применим преобразование Лапласа, введем оператор р и
запишем эти уравнения в операторной форме:



;

 |

Рис. 3 - Структурная схема ПЧ на основе АИН
Глава 2. Статические характеристики САУ переменного тока
Получим механическую характеристику системы, а именно зависимость скорости от момента:

Известно, что критический момент АД вычисляется по формуле:

где n 0 – скорость холостого хода,
А – const ,
x = x 1 + x ’2
Таким образом, критический (max) момент зависит от напряжения и частоты питания в квадрате.
Коэффициент перегрузочной способности:


Mc – момент статической нагрузки.
Из последнего выражения видно, что, чтобы регулирование происходило при постоянстве λ (коэффициент перегрузочной способности), необходимо изменять напряжение и частоту по закону Костенко:

В зависимости от нагрузочной способности могут быть следующие варианты регулирования:
а) регулирование при постоянстве критического момента (M кр - const ):













Получили график механических характеристик для четырех частот:

Рис. 4 - График механических характеристик при регулировании при постоянстве критического момента (M кр - const )
б) регулирование при постоянстве мощности, потребляемой двигателем (p=const ):
Если у вас возникли сложности с курсовой, контрольной, дипломной, рефератом, отчетом по практике, научно-исследовательской и любой другой работой - мы готовы помочь.


Белорусский
национальный технический университет
Кафедра “Электропривод и автоматизация промышленных установок и технологических комплексов”
Факультет ИТР
КУРСОВОЙ ПРОЕКТ
по дисциплине “Теория электропривода”
на тему “Электропривод передвижения тележки
мостового крана по системе ПЧ-АД”
Исполнитель: Петрусевич А.Ю.
Руководитель: Фираго Б.И.
1 Описание работы механизма …..……….…………………………………. 3
2 Расчет статической мощности и времени выполнения
технологических операций за цикл ……… ……………………………………4
3 Построение скоростной и нагрузочной диаграмм механизма и
предварительный выбор мощности ЭД . ……. ……………….……..7
4 Выбор типа ЭД и расчёт оптимального передаточного числа
5 Расчёт и построение упрощённой скоростной и нагрузочной
диаграмм ЭП за цикл работы ……………………………………………. 9
6 Предварительная проверка ЭД по нагреву и перегрузочной
7 Расчёт и построение естественной механической и
электромеханической характеристик ЭД……………. …………………….13
8 Расчет искусственных механических характеристик,
обеспечивающих выполнение технологических операций…………………
9 Выбор преобразователя ………
10 Расчет переходных процессов за цикл работы и построение
11 Окончательная проверка двигателя по нагреву и перегрузочной
12 Расчёт расхода электрической энергии за цикл и расчёт
1 Описание работы механизма
В соответствии с заданием по курсовому проекту необходимо произвести расчёт электропривода передвижения тележки мостового крана по системе ПЧ-АД.
Номинальная грузоподъемность крана
Номинальная скорость тележки
Пониженная скорость
Диаметр колеса тележки
Диаметр цапфы
Длина пролёта крана
Номинальный к. п. д. передачи
Продолжительность включения ПВ=60%;
1) движение тележки с номинальным грузом на расстояние 30м,
3) движение тележки без груза в исходное положение,
2 Расчёт статической мощности и времени выполнения технологической операции за цикл работы
Масса тележки мостового крана связана с номинальной грузоподъёмностью и определяется по формуле:
Статическая сила для передвижения механизма по горизонтальному рельсовому пути:
где - масса номинального груза и масса механизма без груза, кг;
- коэффициент трения скольжения в подшипниках колес (обычно для подшипников качения, - для подшипников скольжения), принимаем ;
- коэффициент трения качения ходовых колес (обычно , принимаем; ;
- коэффициент, учитывающий сопротивление от трения реборд о рельсы, принимаем ;
- радиус ходового колеса, м;
- радиус цапфы (ступицы) ходового колеса, м.
Статическая сила для передвижения механизма с номинальным грузом по горизонтальному рельсовому пути:
,
Статическая сила для передвижения механизма без груза по
горизонтальному рельсовому пути:
,
К. п. д. передачи определяется по формуле:
где - коэффициент, который можно принять равным (0,07-0,1), принимаем
- коэффициент загрузки определяется по формуле:
Тогда КПД передачи:
Статическая мощность при перемещении номинального груза:
Статическая мощность при перемещении пустой тележки:
С целью ограничения динамических нагрузок, обеспечения надёжного сцепления колёс механизмов передвижения с рельсами принимаем ускорение .
Находим время разгона и торможения тележки.
Время работы в установившемся режиме определяется:
Время работы ЭП определяется:
Исходя из формулы (2.14) время цикла:
Суммарное время паузы:
Суммарное время пауз разбиваем на два участка:
Время загрузки и разгрузки:
Так как время цикла меньше 10мин, то режимом работы ЭП является повторно-кратковременным.
3 Построение скоростной и нагрузочной диаграмм механизма и предварительный выбор мощности ЭД
Скоростная и нагрузочная диаграммы механизма представлены на рисунке 3.1
Рисунок 3.1- Скоростная и нагрузочная диаграммы
Произведем предварительный выбор электродвигателя.
Эквивалентная статическая мощность при ПВ=60% за время работы:
В качестве расчетной мощности принимаем:
Приводим двигатель к ПВ=100%:
Выбираем в каталоге электродвигатели с мощностью .
4 Выбор типа ЭД и расчёт оптимального передаточного числа редуктора
В соответствии с полученными расчётами выбираем тип АД с короткозамкнутым ротором.
По каталогу, в соответствии с принятым Р расч. , выбираем двигатель так, чтобы Р н Р расч.
Таблица 4.1- Двигатели серии 4А и мощностью 7,5кВт
Выбираем двигатель 4А132 S У3, двигатель имеет следующие данные:
Номинальный ток статора находится по формуле:
Полное фазное сопротивление:
Найдём абсолютные параметры двигателя:
Номинальная скорость двигателя рассчитывается по формуле:
Передаточное число определяем:
Номинальный момент двигателя:
5 Расчёт и построение упрощённой скоростной и нагрузочной диаграмм ЭП за цикл работы
Радиус приведения поступательного перемещения к вращательному:
,
Допустимое угловое ускорение:
Суммарный момент инерции электропривода, приведенный к валу электродвигателя:
где - коэффициент, учитывающий момент инерции вращающихся частей передаточного механизма , принимаем .
Суммарный момент инерции электропривода, приведенный к валу электродвигателя при перемещении номинального груза:
Суммарный момент инерции электропривода, приведенный к валу электродвигателя при перемещении пустой тележки
Динамический момент при перемещении номинального груза:
Динамический момент при перемещении пустой тали:
Допустимое угловое ускорение имеет знак плюс при пуске, а минус при торможении.
Статический момент при перемещении номинального груза:
Статический момент при перемещении пустой тали:
Электромагнитный момент электродвигателя при разгоне электропривода и перемещении номинального груза:
Электромагнитный момент электродвигателя при перемещении номинального груза с постоянной скоростью:
Электромагнитный момент электродвигателя при торможении электропривода и перемещении номинального груза:
Электромагнитный момент электродвигателя при разгоне электропривода и перемещении пустой тележки:
Электромагнитный момент электродвигателя при движении пустой тележки с постоянной скоростью:
Электромагнитный момент электродвигателя при торможении электропривода и перемещении пустой тали:
Упрощенная скоростная и нагрузочная диаграммы электропривода за цикл работы представлены на рисунке 5.1.
Рисунок 5.1- Скоростная и нагрузочная диаграммы.
6 Предварительная проверка ЭД по нагреву и перегрузочной способности
Эквивалентный момент электродвигателя за время работы, приняв ухудшение условий при пуске и торможении :
Приводим к ПВ=100%:
Условие проверки по нагреву:
Условие по нагреву выполняется.
Проверка двигателя по перегрузочной способности.
- двигатель по перегрузочной способности подходит.
7 Расчёт и построение естественной механической и электромеханической характеристик ЭД
Естественная механическая характеристика выражается уточненной формулой Клосса:
- действующее значение номинального фазного напряжения, В;
Естественная механическая характеристика показана на рисунке 7.1.
Таблица 7.1- Расчетные данные
Рисунок 7.1- Естественная механическая характеристика.
Естественная электромеханическая характеристика выражается следующей формулой:
Таблица 7.2- Расчетные данные
Естественная электромеханическая характеристика показана на рисунке 7.2.
Рисунок 7.2- Естественная электромеханическая характеристика
8 Расчёт искусственных механических характеристик, обеспечивающих выполнение технологических операций
Примем систему частотного управления АД со стабилизацией потокосцепления статора .Механическая характеристика выражается формулой:
- номинальная ЭДС статора, В.
где - критический момент, зависящий от закона частотного управления, Н*м;
- критическое значение параметра абсолютного скольжения;
- относительные частота и скорость;
- синхронная угловая скорость двигателя при номинальной частоте.
Расчёт механической характеристики для α=1.
Механическая характеристика представлена на рисунке 8.1.
Расчётные данные представлены в таблице 8.1
Произведём расчёт механической характеристики для частоты, которая обеспечит необходимую пониженную скорость.
Расчёт механической характеристики для α=0,1.
Механическая характеристика представлена на рисунке 8.1.
Расчётные данные представлены в таблице 8.1.
Рисунок 8.1- Механические характеристики при α=1 и α=0,1.
Произведём расчёт искусственной электромеханической характеристики при ψ= const .
Произведём расчёт для α=1.
Расчётные данные приведены в таблице 8.2.
Электромеханическая характеристика показана на рисунке 8.2.
Произведём расчёт электромеханической характеристики для α=0,1.
Расчётные данные приведены в таблице 8.2.
Электромеханическая характеристика показана на рисунке 8.2
Таблица 8.2- Расчётные данные
Рисунок 8.2- Электромеханические характеристики при α=1 и α=0,1.
Необходимая величина напряжения для реализации закона ψ= const выражается следующей формулой:
Произведём расчёт характеристик для α=1 и α=0,1.
Рисунок 8.3- Графики функций
9 Выбор преобразователя
Для регулирования скорости электродвигателя выбираем из каталога преобразователь частоты:
10 Расчет переходных процессов за цикл работы и построение
кривых
Жёсткость линеаризованной механической характеристики при
Электромеханическую постоянную времени определяем по формуле:
Электромеханическую постоянную времени при перемещении тележки с грузом и без груза:
Расчет и выбор аппаратуры релейно-контакторной схемы управления электроприводом АД с короткозамкнутым ротором. Определение значений номинального и пускового тока двигателя. Выбор тепловых реле, автоматического выключателя, плавких предохранителей.
| Рубрика | Физика и энергетика |
| Вид | курсовая работа |
| Язык | русский |
| Дата добавления | 06.08.2013 |
| Размер файла | 123,3 K |
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
-
1. Задание на контрольную работу
- 2. Расчет и выбор аппаратуры релейно-контакторной схемы управления электроприводом АД с короткозамкнутым ротором
- 2.1 Определение значений номинального и пускового тока двигателя
- 2.2 Выбор рубильника
- 2.3 Выбор максимальных токовых реле
- 2.4 Выбор магнитного пускателя
- 2.5 Выбор тепловых реле
- 2.6 Выбор предохранителей
- 3. Расчёт и выбор аппаратов защиты системы ПЧ-АД
- 3.1 Выбор автоматического выключателя
- 3.2 Выбор плавких предохранителей
- Список использованных источников
- Приложение
- 1 Задание на контрольную работу
электропривод аппарат ток реле
1. Произвести расчет и выбор аппаратуры в релейно-контакторной схеме управления электроприводом асинхронного двигателя с короткозамкнутым ротором в соответствии с техническими данными двигателя. Данные двигателя приведены в таблице 1.1.
2. Произвести расчёт и выбор аппаратуры для защиты системы ПЧ-АД (асинхронный двигатель выбирается в соответствии с первой частью задания).
Принципиальная схема защиты преобразователя частоты (ПЧ) с автономным инвертором напряжения (АИН).
Таблица 1.1 - Характеристики выбранного двигателя
Синхронная скорость вращения 3000 об/мин
2. Расчет и выбор аппаратуры релейно-контакторной схемы управления электроприводом АД с короткозамкнутым ротором
Рисунок 2.1 - Принципиальная схема реверсивного пуска асинхронного короткозамкнутого электродвигателя с реверсом скорости
2.1 Определения значений номинального и пускового тока двигателя
На рисунке 2.1 представлена принципиальная схема реверсивного пуска асинхронного короткозамкнутого электродвигателя с реверсом скорости при помощи реверсивного магнитного пускателя. При включенном рубильнике Р схема подготовлена к работе.
Для пуска двигателя в нужном направлении, например, вперед, необходимо нажать кнопку КнВ. При этом включается группа контактов КВ магнитного пускателя и присоединяет двигатель к сети. Одновременно замыкающий блок-контакт КВ блокирует кнопку КнВ. Для остановки двигателя необходимо нажать кнопку КнС, которая отключит контакты магнитного пускателя, и двигатель будет отсоединен от сети.
Для пуска двигателя в обратном направлении необходимо нажать кнопку КнН, которая включит группу контактов КН. Две фазы статора двигателя (А и В) поменяются местами, и он начнет вращаться в обратном направлении. Если нажать кнопку КнН при включенных контактах КВ, то размыкающий контакт этой кнопки отключит контакты КВ, после чего включатся контакты КН. В результате произойдет торможение противовключением с последующим реверсом двигателя.
Защита двигателя осуществляется с помощью максимальных токовых реле РМ1, РМ2, РМ3 и тепловых реле РТ1 и РТ2. При срабатывании любого из реле размыкается его контакт в цепи контакторов в схеме управления. Последние отключаются и отсоединяют двигатель от сети. В схеме используются кнопки с двумя контактами - замыкающим и размыкающим. Эти контакты включены в разные цепи, обеспечения надежную электрическую блокировку.
Прежде чем приступить к непосредственному выбору пускозащитной аппаратуры, необходимо по данным номинальным параметрам двигателя и сети рассчитать номинальный ток двигателя и его пусковой ток.
Номинальный ток двигателя можно определить по следующей формуле:
где m - число фаз статора.
По известной кратности пускового тока можно определить его значение:
После определения значений номинального и пускового тока можно приступить к выбору требуемой аппаратуры.
2.2 Выбор рубильника
Выбор рубильников необходимо, в общем случае, осуществлять, исходя из следующих условий:
3. Iоткл.доп ? Iраб ф (в случае, если рубильник имеет дугогасительные камеры или разрывные контакты)
В указанных выше соотношениях представлены следующие обозначения: Uном - номинальное напряжение, на которое рассчитан рубильник; Uном.сети - номинальное напряжение сети; Iном - номинальный ток контактов рубильника; Iпрод.расч - продолжительно допустимый ток проводника; Iоткл.доп - предельно допустимое значение тока отключения; Iрабф - рабочий ток цепи в момент начала расхождения дугогасительных контактов аппарата. Выбираем переключатель-разъединитель с центральным рычажным приводом серии ППЦ-32, со следующими номинальными параметрами: Uном = 380 В, Iном = 250 А.
2.3 Выбор максимальных токовых реле
1. Выбираем ток уставки реле в зависимости от типа двигателя:
Так как в данной схеме используется асинхронный короткозамкнутый двигатель, то ток уставки реле выбираем по следующему выражению:
2. Выбираем номинальный ток реле
Исходя из условий выбора максимальных токовых реле по номинальному току Iном.р, нужно выбирать такие реле, чтобы выполнялось условие:
Iном.р? Iном.дв =23,8А (2.4)
Указанным двум условия удовлетворяет реле серии РЭО-401 со следующими номинальными параметрами: Iном=63А, Iсраб.р=(82 ч252)А.
2.4 Выбор магнитного пускателя
Для пуска, реверса и аварийного отключения в схеме электропривода используется реверсивный магнитный пускатель. Для выбора требуемого магнитного пускателя обратимся к пункту 2.2.3 методических указаний. Параметры выбираемых магнитных пускателей должны удовлетворять следующим условиям:
Uном ? Uном.сети =380В
Указанным условиям удовлетворяет магнитный пускатель типа ПME-200 со следующими номинальными параметрами: Uном = 380 В; Iном = 25 А; Iпред = 280 А; пусковая мощность, потребляемая обмоткой, Pв = 160 ВА; номинальная мощность обмотки Pр = 8 ВА.
2.5 Выбор тепловых реле
При выборе теплового реле будем придерживаться порядка, настоящих методических указаний:
1. Выбираем предварительное значение номинального тока нагревателя Iном.нагр номинального тока реле Iном.р:
т.е. Iном.нагр =23,8А. В соответствии с этим значением предварительно выбираем серию реле. Таким образом, можно взять тепловое реле серии ТРН, для которого значение коэффициента д = 2%.
2. Приводим Iном.нагр к действительной температуре окружающей среды, т.е. к tокр (считаем, что tокр = 75°С):
3. Выбираем номинальное значение тока уставки Iном.уст
Так как двигатель работает при температуре, отличной от номинальной, то ток уставки выбирается исходя из следующего выражения:
4. Окончательно выбираем номинальный ток нагревателя Iном.нагр:
Читайте также: