
Силы и моменты органов управления летательного аппарата реферат
Обновлено: 02.07.2024
На летательном аппарате в зависимости от его типа (самолет, ракета, и т.д.), аэродинамической схемы и назначения могут быть применены различные органы управления, такие как аэродинамические рули(руль высоты, руль направления, элероны), поворотные крылья, интерцепторы, газовые рули, поворотные двигатели.
Работа содержит 1 файл
Анализ устойчивости.doc
1. Летательный аппарат как объект регулирования
Органы управления ЛА
На летательном аппарате в зависимости от его типа (самолет, ракета, и т.д.), аэродинамической схемы и назначения могут быть применены различные органы управления, такие как аэродинамические рули(руль высоты, руль направления, элероны), поворотные крылья, интерцепторы, газовые рули, поворотные двигатели.
Наиболее широкое распространение имеют аэродинамические (воздушные) рули. Они представляют собой небольшие несущие поверхности, расположенные на некотором расстоянии от центра масс ЛА. При отклонении соответствующего руля возникает аэродинамическая сила, которая создает момент относительно центра масс ЛА и поворачивает его вокруг соответствующей оси. При непосредственном повороте крыльев (поворотные крылья) значительно быстрее, чем при повороте руля высоты, устанавливается необходимое значение подъемной силы. Однако использование поворотных крыльев усложняет конструкцию ЛА и требует сравнительно большой мощности привода. Поэтому этот вид органов управления обычно находит применение лишь на небольших ЛА, особенно если требуются высокая маневренность и широкая полоса пропускания частот.
Интерцепторы (прерыватели потока) представляют собой небольшие пластинки, выдвигаемые из профиля крыла или оперения перпендикулярно набегающему потоку. Интерцепторы и их привода отличаются простотой, малыми массой и габаритами. Но при отклонении интерцепторов создается большое аэродинамическое сопротивление полету ЛА. Это ограничивает применение интерцепторов.
Газовые рули располагаются в струе газов, вытекающих из сопла двигателя. Они выполняются из жаростойких материалов и ведут себя в газовой струе подобно воздушным рулям в потоке воздуха, на газовом руле при его отклонении от нейтрального положения возникает подъемная сила, которая создает момент относительно центра масс и поворачивает ЛА. Их недостатком является то, что они обгорают от воздействия раскаленных газов, а это ведет к снижению их эффективности, смещению центра аэродинамического давления на руль.
Для управления угловым движением ЛА иногда используют изменение направления силы тяги двигателя. В этом случае камера сгорания двигателя устанавливается в кардановом подвесе и может поворачиваться относительно двух взаимно перпендикулярных осей. При повороте камеры на некоторый угол поворачивается и вектор тяги двигателя. Составляющая вектора тяги, перпендикулярная продольной оси, создает относительно центра масс момент. Применение поворотной камеры сгорания существенно осложняет конструкцию реактивного двигателя.
Иногда (например, на спутниках) для создания управляющих моментов используются небольшие дополнительные реактивные сопла. Эти сопла могут питаться или от основной камеры сгорания, или от источника сжатого газа, или от специальных управляющих двигателей.
Пространственное движение ЛА
ЛА является одним из наиболее сложных объектов управления. Движение ЛА как твердого тела в связанной системе координат описывается шестью нелинейными дифференциальными уравнениями второго порядка (уравнениями Эйлера). Причем силы и моменты, входящие в эту систему уравнений, зависят от высоты, скорости и режима полета, от времени полета (изменяются масса и моменты инерции ЛА в результате расхода топлива, сброса груза).
При исследовании процессов управления уравнения движения ЛА упрощают. С этой целью движение ЛА рассматривают как два независимых движения: продольное и боковое. К продольному движению относят вращательное движение ДА вокруг поперечной оси Оzс и поступательное движение в направлении продольной Охс и нормальной Оyс осей. Боковое движение включает вращение относительно осей Оxс , Оус и поступательное движение в направлении оси Оzс
Уравнения продольного и бокового движения ЛА линеаризуют в предположении, что в процессе полета параметра движения ДА изменяются незначительно. Последнее допущение тем более справедливо, если полет ДА управляется автопилотом.
Уравнения продольного движения и передаточные функции ЛА
В данной работе будем рассматривать продольное движение ЛА. Рассмотрим плоское движение ЛА, при котором вектор скорости центра масо совпадает с вертикальной плоскостью. Такое движение называется продольным.
Для получения уравнений продольного движения ЛА приравняем проекции внешних и инерционных оил на касательную (ось Ох ) и на нормаль (ось Оу ) к траектории, а также внешний и инерционный моменты относительно оси Oz (рисунок.1).
Рисунок 1. К выводу уравнений продольного движения.
На ЛА действуют следующие внешние силы:
У - подъемная сила, направленная перпендикулярно вектору скорости V
X - сила лобового сопротивления, направленная противоположно вектору скорости V ;
Р - сила тяги двигателей, которую будем считать направленной по связанной оси вперед;
mg - вес тела ( m - масса ЛА; g - ускорение свободного падения);
Мz - аэродинамический момент тангажа.
В соответствии с рисунком 1 можно записать уравнения продольного движения в следующем виде:
где ( - угол наклона траектории; - момент инерции ЛА относительно поперечной оси; - скорость тангажа.
Внешние силы Р , X, Y и момент сложным образом зависят от ряда параметров:
где ( - параметр, регулирующий тягу двигателя.
Зависимость параметров от высоты Н определяется через плотность воздуха ρ .
Полученная система дифференциальных уравнений (1) является нелинейной математической моделью продольного движения ЛА. При аналитическом исследовании обычно ограничиваются рассмотрением линеаризованных уравнений.
После некоторых математических операций получим уравнение удобное для исследования:
В уравнениях (3) коэффициенты с индексом 1 характеризуют эффективность аэродинамического демпфирования, коэффициенты с индексом 2 - эффективность момента статической устойчивости, а коэффициенты с индексам 3 - эффективность действия руля.
Запишем передаточные функции ЛА, соответствующие уравнениям (3).
Преобразование Лапласа для уравнений (3) при нулевых начальных условиях имеет вид:
Где s – комплексная переменная.
Исключая из системы 4 переменные и получим:
Полагая отсутствующим возмущающее воздействие , запишем передаточную функцию тангажа по управляющему воздействию:
Полагая отсутствующим управляющее воздействие , запишем передаточную функцию тангажа по возмущающему воздействию:
Для удобства анализа и выяснения смысла входящих в передаточные функция коэффициентов будем записывать их в типовой стандартной форме. Так, передаточные функции, характеризующие продольное движение ЛА, запишем в виде:
где -коэффициент передачи ЛА от управляющего воздействия к углу тангажа, - коэффициент передачи ЛА от возмущающего воздействия к углу тангажа, - постоянная времени, характеризующая маневренность ЛА по тангажу, - постоянная времени, равная периоду собственных (недемпфированных) колебаний ЛА по тангажу, - степень затухания собственных колебаний ЛА по тангажу, .
Исследование передаточной функции ЛА
Передаточная функция летательного аппарата по возмущающему воздействию имеет вид:
Составим структурную схему ЛА по приведенной выше передаточной функции.
Рисунок 2. Структурная схема ЛА
Исследуем устойчивость ЛА по ЛАФЧХ, для этого необходимо произвести расчет всех коэффициентов и постоянных времени. Исходя из задания, высота полета H= м, число маха M=, скорость полета м/с, коэффициенты .
На основании выше изложенных данных произвели расчет коэффициентов и постоянных времени:
Зная коэффициенты и постоянные времени, можно построить ЛАФЧХ системы. Анализ систем с помощью ЛАФЧХ весьма прост и удобен. Воспользуемся самым простым графическим методом асимптот, то есть передаточная функция разбивается на элементарные звенья, ЛАФЧХ которых известна, а результирующая ЛАФЧХ строится путем сложения.
Подсчитаем значение 20lg(k) и логарифмы от постоянных времени:
ЛАФЧХ представлена в приложении 1.
2. Система летательный аппарат – автопилот
Типовая функциональная схема АП
Функциональную схему автопилота рассмотрим на примере АП, состоящего из трех отдельных каналов, т.е. автоматов, воздействующих каждый на свой орган управления угловым положением ЛА: автомат крена элероны, автомат тангажа - на руль высоты, автомат курса - на руль направления. Обычно все три автомата выполняются по одинаковым схемам, отличающимся лишь второстепенными деталями. Поэтому для ознакомления с типовой схемой автопилота достаточно ознакомиться со схемой любого из трех каналов управления. На рисунке 3 представлена типовая схема одного из каналов АП. Для общности регулируемый параметр обозначен , а отклонение руля.
Сигналы с чувствительных элементов (ДУ, ДУС, ДУУ, ДП), пропорциональные параметрам движения ЛА, преобразуются и суммируются в вычислительном устройстве (ВУ), затем усиливаются в усилителе мощности (У) и поступают в качестве командного сигнала на рулевую машинку (РМ), которая, отклоняет орган управления ЛА (руль). Обратная связь с выхода рулевой машинки на вход вычислительного устройства применяется в АП для получения желаемого закона управления и улучшения динамических характеристик привода (рулевой машинки). Механизм согласования (МС) служит для автоматической подготовки АП к включению его силовой части.
Рисунок 3. Типовая функциональная схема АП: ДУ - датчик угла; ДУС - датчик угловой скорости; ДУУ - датчик углового ускорения; ДП - датчик перегрузок (датчик линейного ускорения); ЗУ - задающее устройство (задатчик); БФК - блок формирования команд ВУ - вычислительное устройство; У -усилитель; МС - механизм согласования; РМ - рулевая машинка; ОС - устройство обратной связи; ОСрм - устройство обратной связи рулевой машинки
Задающее устройство (ЗУ) служит для введения в AП заданного значения регулируемого параметра . В качестве ЗУ могут быть использованы ручка задатчика на пульте AП, программный механизм или блок связи с системой наведения.
В АП могут отсутствовать такие элементы, как ДУС, ДУУ, ДП, МС; обратная здесь может охватывать только РМ.
Системы стабилизации беспилотных ЛА по принципу действия не отличаются от самолетных АП, хотя в конструктивном отношении более просты.
Каналы стабилизации рыскания и тангажа асимметричных объектов по своей схеме не отличаются друг от друга. Все три канала стабилизации таких ЛА обычно независимы и построены по прямой схеме.
В современных самолетах для улучшения качества процесса управления между отдельными каналами AП существуют перекрестные связи. Говорят, что АП построен по перекрестной схеме. С помощью этих связей сигнал, пропорциональный углу рыскания, подается на привод элеронов, а сигнал, пропорциональный углу крена, - на привады руля высоты и руля направления. В этом случае, принято называть отдельные каналы АП не по виду регулируемого параметра, а по виду органа управления, обслуживаемого данным каналом. Таким образом, вместо канала крена называют канал элеронов, вместо канала рыскания - канал руля направления.
Рулевой привод
Блок формирования команд, включающий вычислительное устройство (сумматор) и усилитель, совместно с рулевой машинкой образуют рулевой привод (сервопривод), входом которого является совокупность сигналов на сумматоре, а выходом - угол отклонения руля. Рулевой привод может рассматривать как автоматическую систему, предназначенную для управления перемещением органов управления ЛА рисунок 4.
Рисунок 4. функциональная схема рулевого привода
В зависимости от типа ЛА, назначения системы управления, требуемых характеристик управления и стабилизации в автопилотах могут применяться различные типы рулевых приводов.
Рулевой привод с жесткой обратной связью
Жесткая обратная связь () обеспечивает пропорциональность угла отклонения руля величине управляющего сигнала и слабую зависимость этого отклонения от шарнирного момента. Сигнал, пропорциональный углу отклонения руля, при помощи цепи обратной связи сравнивается с управляющим сигналом. В качестве элемента обратной связи может быть использован потенциометрический датчик, измеряющий угол отклонения руля. На рисунке 5 показана структурная схема рулевого привода с жесткой обратной связью.
Рисунок 5. Структурная схема рулевого привода с жесткой обратной связью
Передаточная функция рулевого привода:
где: - постоянная времени рулевого привода,
- степень затухания колебаний рулевого привода, - коэффициент передачи рулевого привода,.
Управление движением летательного аппарата (ЛА), полет которого происходит в атмосфере Земли, осуществляется с помощью аэродинамических органов управления, к которым относятся руль высоты, руль направления и элероны. Создавая моменты относительно центра масс, эти органы управления изменяют угловое положение ЛА, что позволяет управлять действующими на ЛА силами и формировать желаемую траекторию.
На рис. 2.1. и 2.2. показаны органы управления для различных типов самолетов, на рис. 2.3. правила знаков для отклонения руля высоты (dв), руля направления (dн) и элеронов (dэ).
Управление движением ЛА относительно центра масс обеспечивает установку и поддержание заданных значений угловых координат. Этот процесс часто называют угловой стабилизацией, а систему управления движением относительно центра масс – системой угловой стабилизации ЛА. Эта система содержит три канала, каждый из которых предназначен для стабилизации объекта управления относительно осей прямоугольной декартовой системы координат, связанной с летательным аппаратом.
Угловое движение ЛА относительно продольной оси определяется углом крена (рис. 2.4.), управление этим угловым движением осуществляет канал крена системы управления, а органом управления в этом канале являются элероны. Поскольку момент крена, как и всякий момент, пропорционален расстоянию от точки приложения силы до оси вращения, элероны на самолетах располагаются на концах крыльев (рис. 2.1. – 2.4.). Это дает возможность при одинаковой аэродинамической силе, возникающей на элеронах, получить больший момент управления.
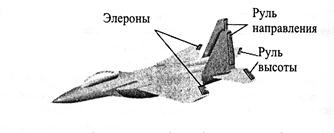
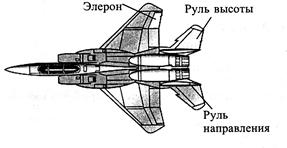
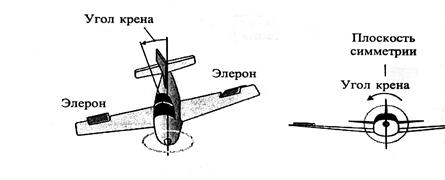
Рис. 2.5. Принципиальная схема управления движением относительно
центра масс (угловой стабилизации) летательного аппарата.
Принципиальная схема управления движением летательного аппарата (самолета) относительно центра масс приведена на рис. 2.5. и содержит все необходимые элементы системы управления: объект управления, измерительные, задающие и сравнивающие устройства, устройство формирования закона управления, исполнительный механизм и органы управления.
Построение областей устойчивости для различных моментов времени полета и исследование эффективности органов управления. Область устойчивости при повороте маршевого двигателя. Отклонение летательных аппаратов, возмущающая сила и область устойчивости.
| Рубрика | Транспорт |
| Вид | контрольная работа |
| Язык | русский |
| Дата добавления | 06.11.2013 |
| Размер файла | 1,6 M |
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Введение
область устойчивость летательный аппарат
При исследовании устойчивости и управляемости летательного аппарата (ЛА) анализируется возмущенное движение, отличное от программного из-за воздействия различных возмущающих факторов. Динамические характеристики ЛА и автомата стабилизации (АС) должны обеспечивать максимальное совпадение параметров возмущённого и невозмущённого (программного) движения.
После выбора k1, k2 и определения всех коэффициентов уравнений возмущённого движения ЛА можно приступать к исследованию эффективности заданных органов управления. Под эффективностью понимают ускорение (линейное или угловое), которое приобретает ЛА при отклонении органов управления на единичный угол.
Эффективность в сочетании с предельно допускаемыми углами отклонения органов управления определяет максимальные управляющие моменты. Которые должны обеспечивать значения параметров возмущённого движения ЛА в пределах заданных ограничений.
При разработке технического проекта необходимо рассматривать ЛА с подвижным жидким топливом в баках. Алгоритм построения областей устойчивости с учетом малых колебаний жидкого топлива в баках приведен в работе [4]. В данной работе приводится методика выбора параметров демпфирующих устройств (приложение 3) с целью обеспечения локальной устойчивости ЛА с жидким топливом.
Цель работы. Методы расчета
Построение областей устойчивости для различных моментов времени полета и исследования эффективности органов управления.
При исследовании устойчивости и управляемости ЛА анализируются возмущенное движение, отличное от программного из-за воздействия различных возмущающихся факторов. Динамические характеристики ЛА и автомата стабилизации должны обеспечить максимальное совпадение параметров возмущенного и невозмущенного (программного) движения.
После выбора k1, k2 и определения всех к-ов уравнения возмущенного движения ЛА можно приступать к исследованию эффективности органов управления. Под эффективностью понимают ускорение (угловое или линейное), которое приобретает ЛА при отклонении органов управления на единичный угол. Эффективность в сочетании с предельно допускаемыми углами отклонения органов управления определяет максимальные управляющие моменты, которые должны обеспечивать значения параметров возмущенного движения ЛА в пределах заданных ограничений.
- смещение центра масс ЛА в возмущённом движении в проекции на связанную ось Cy;
- возмущение угла тангажа;
- отклонение органов управления в возмущенном движении по каналу тангажа;
- максимальный угол отклонения рулей по тангажу;
- момент инерции ЛА относительно связанной оси Cz;
, - возмущающая сила и момент в плоскости тангажа;
- скорость ЛА в возмущенном движении в проекции на связанную ось Cy;
- скорость центра масс ЛА в программном движении;
, - производные от коэффициентов подъемной силы по углам атаки и отклонения рулей;
- коэффициент лобового сопротивления ЛА при нулевом угле атаки;
, - тяга двигателей и управляющих двигателей соответственно;
, - коэффициенты демпфирования по каналу тангажа;
T1, T2 - постоянные времени автомата стабилизации;
k1, k2, k3, k4 - коэффициенты усиления автомата стабилизации;
a - расстояние между осями двигателей в плоскости Cxy;
- расстояние от центра масс ЛА до свободной поверхности жидкости в баке с номером k;
- расстояние от центра масс ЛА до точки приложения управляющей силы;
, - коэффициенты уравнений движения ЛА.
Исходные данные
Секунда полета 4
Время действия ветра 4
Профиль ветра а, в
Способ управления: поворотные маршевые двигатели и управление дросселированием
Геометрические размеры Sмид=28, 2мІ L=52, 5м
Окислитель О?, с=1100 кг/мі
Горючее H?, с=70 кг/мі
Масса топлива первой ступени Мт1=251т
Весовое соотношение компонентов топлива 5
Объем газовой подушки в баках 0, 03*Vкомпонентов
Момент инерции и ц. т. всего ЛА Хцт=33, 6м
При не заправленной первой ступени lz=19610 т мІ
Способ управления по тангажу рассогласование тяги
Перекос двигательной установки 0, 001
Ускорение свободного падения g=9, 81 м/сІ
Расстояние между осями двигателей, а=2, 2м
Краткое изложение методики выполнения работы
Алгоритм построения областей устойчивости ЛА
Замкнутая система уравнений возмущённого движения по каналу тангажа имеет вид:
Динамические к-ты подсчитываются по следующим формулам:
К-ты, характеризующие эффективность средств управления, определяются по формулам:
при использовании поворотного маршевого двигателя
где - расстояние от точки приложения управляющих сил до центра масс ЛА;
В случае рассогласования тяги связи маршевых двигателей:
При управлении рассогласованием тяги под понимается степень дросселирования или форсирования тяги:
Значения k1 и k2, соответствующие границе области устойчивости, определяются в зависимости от частоты по формулам:
Каждому значению соответствуют определённые значения k1 и k2. Т. е. точка в плоскости. Частота варьируется не от -? до +?, а только от до . Зависимости и являются чётными.
После построения нескольких кривых D-разбиения определяется зона общей устойчивости, прямоугольник ограниченный прямыми , , , . Разбив этот прямоугольник на сетку и обеспечив достаточный шаг, проверяются точки плоскости, являющиеся узлами сетки, на принадлежность к общей области устойчивости. Каждая точка проверяется по критерию Рауса-Гурвица для всех рассматриваемых моментов времени. После обнаружения 50 точек общей области или после перебора всех узлов сетки (если общих точек меньше 50) вычисляются коэффициенты k1 * и k2 * по формулам
где k1 * min, k1 * max, k2 * min, k2 * max - минимальные и максимальные значения коэффициентов, принадлежащих общей области устойчивости.
Определяются все коэффициенты, входящие в уравнения системы (1). Проводится интегрирование этой системы уравнений. В процессе интегрирования определяются возмущения параметров движения ЛА . ?Vy, ?y и ?д?.
Выполнения работы
Управление отклонением маршевого двигателя.
Область устойчивости при повороте маршевого двигателя
Динамические коэффициенты, характеризующие эффективность органов управления:
cyd=3705000, 000 ctd=-85406984, 600
k1= 2, 788 k2= 2, 053
а) Профиль ветра - а. Время действия - 4 с. Максимальная скорость - 20 м/с
Об эффективности органов управления и качестве переходного процесса судить по диаграммам угла тангажа ЛА и угла отклонения рулей.
Отклонение ЛА по тангажу
Отклонение рулей ЛА
б) Профиль ветра - в. Время действия - 4 с. Максимальная скорость - 20 м/с
Об эффективности органов управления и качестве переходного процесса можно судить по диаграммам угла тангажа ЛА и угла отклонения рулей.
Отклонение ЛА по тангажу
Отклонение рулей ЛА
Управление дросселированием тяги маршевых двигателей.
Динамические коэффициенты, характеризующие эффективность органов управления:
cyd=0, 000 ctd=-8151000, 000
k1= 29, 225 k2= 21, 515
а) Профиль ветра - а. Время действия - 4 с. Максимальная скорость - 20 м/с
Об эффективности органов управления и качестве переходного процесса можно судить по диаграммам угла тангажа ЛА и угла отклонения рулей.
Отклонение ЛА по тангажу
Отклонение рулей ЛА
б) Профиль ветра - в. Время действия - 4 с. Максимальная скорость - 20 м/с
Об эффективности органов управления и качестве переходного процесса можно судить по диаграммам угла тангажа ЛА и угла отклонения рулей.
Отклонение ЛА по тангажу
Отклонение рулей ЛА
В обоих случаях ?? и ?д? стремятся к нулю, затухают. Система устойчива (критерий Ляпунова).
При сравнении областей устойчивости для разных органов управления можно заметить, что при управлении дросселированием значения коэффициентов k1 и k2, образующих границу области устойчивости, на порядок больше соответствующих коэффициентов при управлении поворотом МДУ. Это говорит о том, что при управлении дросселированием требуются большие коэффициенты усиления, следовательно, органы управления сами по себе менее эффективны.
Сравнение воздействия ветровой нагрузки показывает, что при знакопеременной возмущающей силе и моменте (профиль в) амплитуда отклонения угла ЛА в начальный момент действия возмущения значительно меньше, это объясняется тем, что импульс силы в случае знакопеременного ветрового воздействия значительно меньше импульса силы в случае знакопостоянного воздействия.
На графиках видно, что при одном и том же угле отклонения ЛА углы отклонения органов управления, следовательно, можно сделать вывод о том, что отклонение МДУ является более эффективным.
1) Сравнение эффективности органов управления ЛА
[1/cІ] - угловое ускорение поворота ЛА при отклонении органа управления на 1 градус.
1) Отклонение мду
Анализ ветровой нагрузки.
Вид ветровой нагрузки не влияет на построение областей устойчивости, так как силой и возмущающим моментом при решении системы уравнений возмущенного движения для построения областей устойчивости мы пренебрегаем из-за их малости.
Подобные документы
Особенности динамики полета - науки о законах движения летательных аппаратов под действием аэродинамических и гравитационных сил. Расчет трасполагаемых тяг, характеристик устойчивости и управляемости самолета. Определение аэродинамической хорды крыла.
контрольная работа [79,2 K], добавлен 14.06.2010
Типы беспилотных летательных аппаратов. Применение инерциальных методов в навигации. Движение материальной точки в неинерциальной системе координат. Принцип силовой гироскопической стабилизации. Разработка новых гироскопических чувствительных элементов.
реферат [49,2 K], добавлен 23.05.2014
Обеспечение безопасности полетов. Анализ опасных сближений самолетов. Цифровой метод определения временного критерия опасности. Определение взаимного расположения летательных аппаратов в горизонтальной плоскости. Модуль динамической экспертной системы.
дипломная работа [885,0 K], добавлен 16.04.2012
Проведение расчета показателей эксплуатационной надежности по изделиям летательных аппаратов и авиационных двигателей с учетом периодичности их ТО. Анализ режимов выборочного контроля опасных зон в конструкции планера. Авиамодели технического состояния.
контрольная работа [439,1 K], добавлен 26.10.2013
Изучение устройства и принципа действия системы курсовой устойчивости автомобиля. Определение наступления аварийной ситуации. Исследование способов сохранения устойчивости и стабилизации движения автомобиля с помощью системы динамической стабилизации.
Равнодействующая аэродинамических сил RА создает относительно центра масс самолета момент МR. Изменяя величину и направление этого момента можно управлять самолетом. Для этого на самолете используются рулевые поверхности.
Разложение момента МR на оси связанной системы координат дает следующие составляющие:
- Мх - момент крена (поперечный),
- Мy - момент рыскания (путевой),
- Мz - момент тангажа (продольный).
Рекомендуемые материалы
Вариант ДМ 713, РПЗ и листы. Привод ленточного транспортера с коническо-цилиндрическим редуктором (быстроходная ступень - коническая передача с круговым зубом зубом, тихоходная ступень - цилинрическая прямозубая) 2022 г.
 |
Момент МR можно рассматривать как сумму моментов отдельных частей самолета с учетом интерференции.
Правило знаков для моментов, действующих на самолет, такое же, как и для моментов крыла.
Следует заметить, что существует правило знаков и для отклонения рулевых поверхностей. За их положительное отклонение принимается такое, при котором на самолете возникает соответствующий отрицательный момент. Например, за положительное отклонение руля высоты принимается отклонение его хвостиком вниз ( для нормальной схемы самолета), при котором возникает пикирующий момент, имеющий отрицательный знак.
Аэродинамический момент МR и его составляющие будут зависеть от тех же факторов, от которых зависят аэродинамические характеристики частей самолета, т.е. от угла атаки , угла скольжения , числа М полета, угла отклонения рулевых поверхностей, геометрических параметров самолета, координаты центра масс и др.
7.2. Аэродинамический момент тангажа и его зависимость от угла атаки
При полете без скольжения и при не отклоненных органах путевого и поперечного управления моменты Мх и Му отсутствуют и возникает только момент тангажа Мz, действующий в продольном канале (относительно поперечной оси Z)
В общем случае Мz создается нормальной силой Y, приложенной в центре давления

Из рисунка видно, что момент Мz определяется выражением:
где хц.д. и хц.м. - координаты центра давления и центра масс соответственно относительно начала координат, за которое чаще всего принимается носок средней аэродинамической хорды.
Коэффициент продольного момента:

mz= (7.3)

(7.4)

(7.5)
При бессрывном обтекании самолета момент тангажа, как и коэффициент подъемной силы, линейно зависит от угла атаки
 |
 |

Производная коэффициента продольного момента по углу атаки так же, как и суа a , зависит от геометрических параметров самолета и числа М полета. Характер протекания данной зависимости объясняется характером изменения суа от М и тем, что при М > Мкр. Центр давления смещается назад вследствие перераспределения давления на отдельных частях самолета.
 |
7.3. Аэродинамический фокус по углу атаки и зависимость его положения от формы, упругих деформаций летательного аппарата и числа М.
Различают четыре вида аэродинамических фокусов: фокус по углу атаки или просто фокус; фокус по углу скольжения; фокус по отклонению органа управления тангажа; фокус по отклонению органа управления рысканием. Рассмотрим первый фокус.

Используя правила параллельного переноса сил можно записать, что момент Мz относительно центра масс самолета

(7.6)

(7.7)
где МZF - момент относительно фокуса,
Так как по определению фокуса момент МZF остается постоянным при изменении , в том числе таким же, как и при о (cу=0), то очевидно, что МZF=МZO и mZF=mZO. Поэтому, при достаточно малых (в пределах линейной зависимости mz от ) будет иметь место равенство:

(7.8)
Форма крыла в плане качественно так же, как и форма горизонтального оперения, влияет на положение фокуса. Но крыло на самолетах располагается вблизи центра масс и поэтому изменение несущих свойств крыла в меньшей степени смещает фокус самолета.
Корпус, как правило, смещает фокус вперед. На смещение фокуса влияет форма головной части корпуса и ее удаление от масс. Заостренная головная часть создает, при прочих условиях, наибольшую подъемную силу и сильнее смещает
Влияние формы отдельных частей самолета на положение фокуса может менятся при изменении режима полета. Так, наплыв малого удлинения и большой стреловидности, расположенный впереди базового крыла, на малых и умеренных углах атаки создает небольшую подъемную силу; на больших же углах атаки за счет образования мощного вихря существенно увеличивает подъемную силу и на самом наплыве, и на крыле и может вносить заметные коррективы в положение фокуса самолета.
На положение фокуса влияют деформации всех основных частей самолета. Наиболее существенное влияние на положение фокуса самолета оказывают деформация крыла и оперения и деформация хвостовой части фюзеляжа, приводящая к изменению фактических углов атаки оперения. Современные самолеты имеют, как правило, стреловидные крылья и оперение. Крыло и оперение под действием скоростного напора может закручиваться, увеличивая или уменьшая угол атаки, или изгибаться. Изгиб стреловидного крыла прямой стреловидности вызывает уменьшение местных углов атаки в концевых его сечениях (рис. 7.7), что ведет к уменьшению несущих свойств ( ) и абсолютной величины . В зависимости от того, какая из этих величин меняется в большей степени, фокус может смещаться или вперед, или назад. Как правило, с ростом скоростного напо- ра фокус крыла смещается вперед (рис. 7.8).


Горизонтальное оперение на основных режимах полета создает положительную подъемную силу, изгибая хвостовую часть корпуса в направлении уменьшения местных углов атаки горизонтального оперения. При этом фокус самолета смещается вперед.
Положение фокуса самолета зависит от числа М полета в силу изменения характера распределения давления при переходе на закритические числа М.
Одним из способов борьбы с этим явлением является применение на самолете "наплыва".
Коэффициент mZO также изменяется по числам М
 |
Понятие аэродинамического фокуса используется при рассмотрении вопросов устойчивости самолета.
Определение: устойчивость - это способность самолета без вмешательства летчика возвращаться к исходному режиму полета после прекращения действия внешних возмущений.
Различают продольную устойчивость (по тангажу) и боковую (по крену и рысканию). Кроме того различают статическую и динамическую устойчивость.
Под статической устойчивостью понимается первоначальная тенденция самолета создавать стабилизирующий момент (на ликвидацию последствий возмущения). Однако переходный процесс к исходному режиму полета может быть при этом или сходящимся или расходящимся. При сходящемся переходном процессе самолет будет не только статически, но и динамически устойчив. Вопросы динамической устойчивости рассматриваются в дисциплине "Динамика полета".
Познакомимся с понятием продольной статической устойчивости.

Определение: продольной статической устойчивостью самолета называется его способность без вмешательства летчика создавать момент тангажа, направленный на возвращение к исходному углу атаки после прекращения действия внешних возмущений.
Пусть самолет под действием возмущения увеличит угол атаки на величину D . При этом возникает приращение подъемной силы DYа, приложенное в фокусе, и приращение момента DМZ. Если фокус расположен за центром масс, то DМz будет направлен на уменьшение .
 |
Таким образом, условием продольной статической устойчивости является

Если , то самолет неустойчив, если , то он нейтрален, т.е. не реагирует на изменение угла атаки.
В пределах линейной зависимости коэффициента mz от Суа

(7.9)
Таким образом, условием продольной статической устойчивости является:

(7.10)


Величина называется запасом продольной статической устойчивости и выражается в долях или в % средней аэродинамической хорды.
Известно, что общее движение ракеты или ЛА можно разделить на движение центра масс и движение ЛА вокруг собственного центра масс. Поэтому задачу управления полетом ЛА можно разделить на две части:
– управление движением центра масс, т.е. изменение величины и направления вектора скорости;
– управление вращательным движением относительно центра масс.
В общем случае в полете на ракету действуют следующие силы:
RA – полная аэродинамическая сила;
Примечание: При старте на ракету могут действовать силы реакции стартовых устройств.
Для изменения траектории полета нужно изменить величину и направление равнодействующей всех этих трех сил. Т.к. на силу тяжести влиять невозможно, то управлять полетом можно лишь изменяя величину и направление RA и Р (рис. 15).
Заменим эти две силы равнодействующей: . Разложим ее на нормальную и касательную составляющие к траектории движения ЛА:.

В проекции на касательную к траектории движения ЛА: .

Изменение достигается (и в баллистических расчетах также) изменением тяги маршевых двигателей. Для баллистических ракет с ЖРД изменение силы тяги происходит за счет изменения секундного расхода топлива.

Ту часть силы , которую можно использовать для регулирования скорости ракеты принято называть тангенциальной управляющей силой. Нормальная составляющая управляющей силы обеспечивает управление положением ЛА в пространстве (рис. 16).
Рассмотрим :так как, то. В проекциях на оси координат, где– нормальная управляющая сила, а– боковая управляющая сила.

Создавая необходимые по величине и направлению тангенциальную, нормальную и боковую управляющие силы можно обеспечить заданную траекторию полета ракеты.
Органы управления Управляющие моменты
Органы управления – это агрегаты и устройства, создающие управляющие усилия, которые действуют на ЛА и обеспечивают движение по заданной траектории, а также парирование возмущающих сил и моментов, возникающих во время этого движения.

Они действуют в соответствии с сигналами, вырабатываемыми системой управления. В большинстве случаев изменение требует поворота корпуса ракеты относительно ее вектора скорости на некоторый угол (угол атаки, скольжения или крена).
Для поворота корпуса к нему необходимо приложить соответствующий момент относительно центра масс. Такой момент называют управляющим моментом.
Необходимо отметить – управляющие моменты нужны не только для того, чтобы ЛА двигался по заданной траектории, но и для того, чтобы поддерживать угловую ориентацию ЛА в пространстве (т.е. поддерживать угловую стабилизацию). Необходимость такой поддержки связана с тем, что на ЛА непрерывно действуют различные возмущения. Возмущения могут быть вызваны:
– воздействием неспокойной атмосферы.
Устройства, которые создают управляющие моменты, необходимые для угловой стабилизации ЛА принято называть органами стабилизации.
У баллистических ракет функции органов управления и органов стабилизации могут выполняться одними и теми же устройствами. У ракет-носителей эти устройства разделены.
Читайте также: