
Роботокомплекс для ремонта трубопроводов реферат
Обновлено: 05.07.2024
Использование промышленной робототехники является ключевым фактором для стабильного развития предприятий в условиях жесткой конкуренции — ее внедрение позволяет значительно повысить надежность, гибкость и эффективность всего производства. При этом до недавнего времени роботы были известны способностью выполнять только узконаправленную и механическую работу.
С развитием робототехнической индустрии на рынке стали появляться сложные диагностические устройства, способные четко выявлять недостатки эксплуатируемого оборудования, в том числе трубопроводных систем с любым уровнем доступности. Это позволило открыть новые перспективы как для промышленных предприятий, так и для новых подрядчиков. О таких роботах, и возможностях, которые открывают их появление, пойдет речь в этой статье.
Зачем это нужно
Для предупреждения подобных инцидентов добывающие и перерабатывающие компании вынуждены регулярно проверять состояние своих трубопроводов. Обычно эта процедура осуществляется при помощи такого метода, как гидротестирование, когда в трубу под давлением подается вода, либо просто путем проведения выборочных проверок. При этом компании не могут полностью удостовериться, в каком реальном стоянии находятся трубы, и насколько велика вероятность их прорыва.
Ситуация сильно изменилась с приходом на рынок робототехнических компаний. Они предлагают использовать для диагностики специально созданных роботов, которые проникают в трубопроводы природного газа и жидкого топлива для проверки на износ, разрыв и коррозию.
Как все начиналось
Следующим этапом в развитии манипуляторов стало появление на рынке сварочного робота, профессиональные возможности которого, например, помогли успешно провести работы на водно-графитовом реакторе канального типа Билибинской АЭС. Далее был создан уже полнофункциональный комплекс, умеющий проводить восстановительный ремонт телескопических соединений трактов технологических каналов реакторов большой мощности — ему удалось провести успешную модернизацию энергоблоков на Ленинградской АЭС.
Гусеничный робот с электромагнитным-акустическим методом работы успел успешно проявить себя и в США — его функциональные возможности позволили провести подземное исследование трубопроводов высокого давления с локтевыми сгибами на АЭС Cooper в штате Небраска, диагностику газо- и нефтепроводов в Калифорнии и Аляске, а также проверку безопасности систем газоснабжения в Нью-Йорке в районе Манхэттена.

Принцип работы
Длинный и прочный кабель соединяет робота со специально обученным оператором, который располагается в фургоне на безопасном расстоянии от трубопровода. В его задачи входит мониторинг и обработка полученных данных для выявления недостатков трубопровода.
Сколько это стоит
В среднем за один день такому роботу удается проверить 400 метров трубопровода.
Что дальше
На данный момент одной из последних разработок робототехнической индустрии стало устройство, позволяющее проводить исследования в танках-емкостях нефтехранилищ и других технологических емкостях.
Дно таких хранилищ отличается особой труднодоступностью, поэтому предприятиям обычно приходится их высушивать, приостанавливая на срок от 6 до 8 недель. Очистить такое количество легковоспламеняющегося осадка из резервуара — довольно трудоемкий процесс, который может вылиться в несколько десятков миллионов рублей, не говоря уже об опасности проведения таких работ для сотрудников предприятия. Поэтому появление специально созданного для таких функций робота является выгодным решением для обеих сторон.
Уже сейчас можно с уверенностью сказать, что данный робот позволит открыть совершенно новые возможности для решения технологических задач промышленности.
Под роботизированной системой я понимаю систему, у которой есть два или более программно управляемых привода, предназначенных для перемещения датчиков относительно объекта контроля или наоборот (по ГОСТ Р ИСО 8373-2014)
Под неразрушающим контролем имеем в виду метод контроля, при котором не нарушается пригодность объекта. Неразрушающий контроль обязателен при производстве и эксплуатации опасных промышленных объектов: трубопроводов, сосудов, транспорта и сооружений. Ограничимся здесь ультразвуковым, вихретоковым и телевизионным видами контроля, не вдаваясь в детали.
Задача, которую я себе ставлю — рассказать всем интересующимся об отечественных разработках в роботизации неразрушающего контроля. О кейсах и фичах, которые уже внедрены или будут решены в будущем.
Почему я могу писать об этом — я 20+ лет участвую в разработке и эксплуатации подобных систем и накопил достатоно знаний о реальных возможностях оборудования. Технические характеристики и описания я взял по большей части из открытых источников. Личный опыт автора отражен курсивом.
Зачем нужны роботы в неразрушающем контроле
Роботы в неразрушаюшем контроле заменяют человека:
там, куда человек не влезет по причинам размеров (например технологический канал реактора РБМК-1000 диаметром 82 мм или трубопровод Ду400 компрессорной станции)
куда человек не полезет из-за опасных условий (корпус реактора АЭС, обшивка судна, стоящего в мокром доке)
где требуется документирование результатов контроля с привязкой координат датчиков при движении или нужна принципиально высокая скорость контроля, в том числе однотипных изделий
Роботы для внутритрубной диагностики

Робот для внутритрубной диагностики А2072
Решенные технологические задачи для такого робота:
Связь на основе WiFi, обеспечивающая расстояние передачи свыше 1 километра
Магнитные колеса-редукторы (усилие отрыва от ферромагнитной поверхности 60 кг ) позволяют пробираться в тройники, зависать в потолочном положении
LiFe полимерные аккумуляторы емкостью 200 Вт*ч, обеспечивают до 8 часов автономной работы
3-х осевой МЭМС-инклинометр фиксирует угловое положение (погрешность измерения ± 0,1 градус), что позволяет реализовать функции трассировки пройденного участка и автоматическое управление движением
Блок ультразвукового контроля построен на базе преобразователей с сухим точечным контактом, то есть не нужно тащить с собой контактную жидкость. Низкая чувствительность таких датчиков компенсируется тем, что используется решетка из 32 элементов, работающих совместно
Конечно присутствует телекамера с подсветкой для поиска посторонних предметах в трубах (чего там только не бывает!) и выявления больших дефектов
Как приятная добавка — датчик метана на борту
Еще одно семейство роботов российской разработки применяется в том числе в России, Франции и США, согласимся это не такой частый случай. Это разработки ТДК-400-М-Л, RODIS-8.

Внутритрубный робот ТДК-400-М-Л на гусеничном ходу
Особенности этих роботов:
в зависимости от исполнения пролезают в трубопроводы Ду200-Ду1400
перемещение идёт на гусеничном ходу враспор
всё-таки питаются по кабелю длиной до 550 м, зато гарантировано будут извлечены из трубы в случае необходимости
Системы для телеинспекции трубопроводов Sigma с манипуляторами Р150 и Р200К позволяют проводить телевизионный контроль, измерение деформации, отслеживание трассы труб внутренним диаметром от 150 мм.
Дополнительная камера заднего вида
Устройство намотки кабеля, синхронизированное с движением робота
Защита от опрокидывания
Задача внутритрубной диагностики автономными роботами весьма актуальна — в России десятки тысяч километров трубопроводов, которые не могут быть проконтролированы традиционными внутритрубными снарядами. Как говорят медики, не бывает здоровых, бывают недообследованные.
Роботы для контроля трубопровода снаружи
Другой пример контроля основного металла и сварных швов труб при эксплуатации — сканер-дефектоскоп АВТОКОН-МГТУ, который, как видно из названия, разработан в МГТУ (МВТУ) им. Баумана. Только этот сканер автономно перемещается по наружной стороне трубы, вдоль трубы или по её окружности. Данные тоже передаются на управляющий компьютер по WiFi.
У него два ведущих магнитных колеса, аккумуляторы и блоки с ультразвуковыми датчиками для контроля сварного шва с обеих сторон. Его особенность в том, что он тащит на себе баллончики с густой смазкой, которая постепенно подаётся под ультразвуковые датчики.

Сканер-дефектоскоп АВТОКОН
Интересная задача для подобных роботов, которые ползают по трубе изнутри или снаружи — отслеживать и контролировать позицию относительно валика усиления сварного шва. Потому что промах означает, что контроль не был проведен полноценно. Точность позиционирования зависит от методики контроля и толщины стенки трубы, и желательно, чтобы она составляла до 1/4 толщины.
Наиболее простым в реализации, однако не самым дешевым, способом выглядит применение лазерного триангуляционного профиломера, по измерениям профиля валика усиления шва без труда определяются его границы и отклонение центра от желаемого. Рисунок ниже поясняет как выглядят исходные данные профилометрии.

Построение профиля сварного шва лазерным триангуляционным датчиком
Другой способ состоит в том, что лазерная линия проецируется простой указкой, а относительно дешевая видеокамера снимает профиль и управляющий компьютер пытается рассчитать профиль подобный показанному выше по видеоизображению (облаку точек). На практике требуемая точность позиционирования вполне может быть достигнута.
Сканирующие устройства для трубопроводов и оборудования АЭС
Для контроля оборудования и трубопроводов атомных электростанций еще с 1970-х годов применяются системы автоматизированного контроля: корпусов реакторов и технологических каналов, трубопроводов различных типоразмеров, теплообменных трубок парогенераторов.
Задача решается примерно одна и та же — переместить группу датчиков (ультразвуковых, вихретоковых) по заданной траектории, обеспечив их равномерное прижатие и высокую повторяемость позиционирования.
В зависимости от сложности задачи такие сканеры бывают двух-, трех- координатные, крепятся к объекту контроля на монтируемые направляющие или передвигаются на магнитных колёсах. Применяемые приводы обычно или на основе цепной, ремённой или зубчатой передачи. Реже используются винтовые передачи, пневмоприводы. Информация о текущей координате обычно передается в дефектоскоп с помощью квадратурных энкодеров.
Системы контроля корпусов реактора ВВЭР-1000 (СК.27, СК.187) и каналов РБМК-1000 (СК.26), разработанные в НИКИМТ в советское время, выпускаются и применяются поныне. Эти системы предусматривают удаление оператора на расстоянии 100-150 м от объекта контроля.
Одно из важных требований к таким системам, которые применяются на вскрытом оборудовании, состоит в том, чтобы ничего от них не отвалилось и не попало в первый контур реакторной установки. Еще к особенностям СК.187 — робот несет также и оборудование для зачистки наружной поверхности корпуса и днища реактора и как видно на фотографии, катается по настоящим рельсам, если не ошибаюсь, Р50.

Система контроля корпуса реактора снаружи СК.187
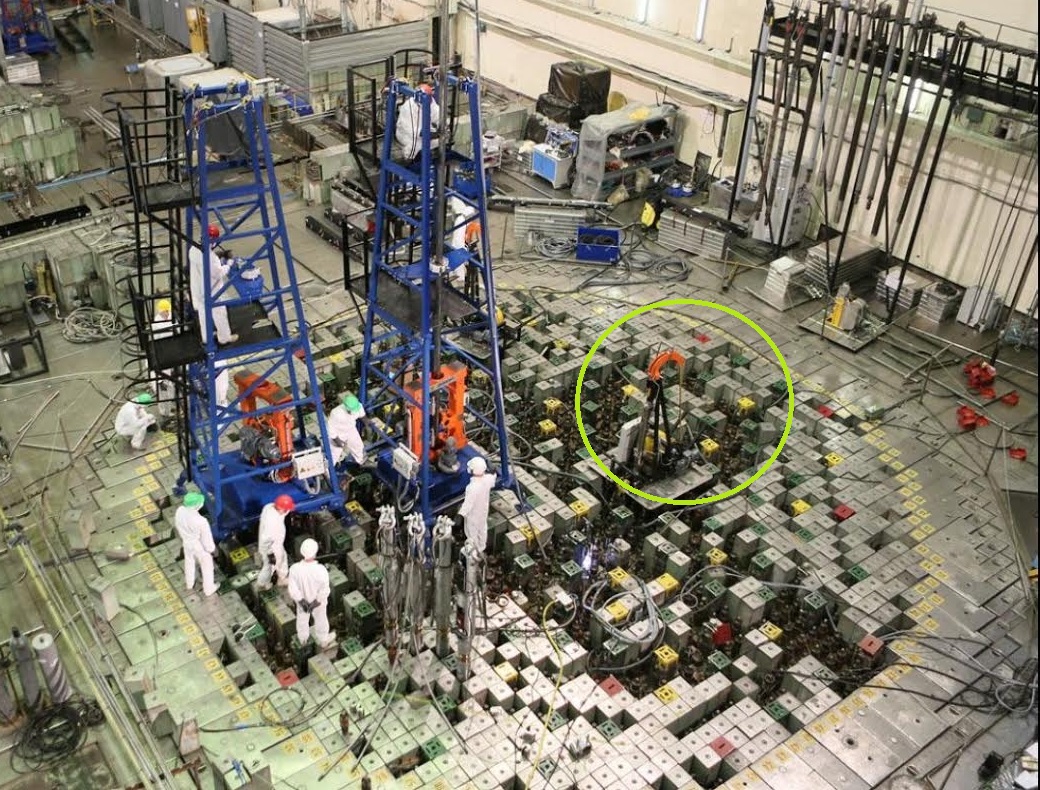
Так выглядят каналы РБМК-1000. На фото показаны системы для ремонта графитовой кладки, а не система СК.26. Что-то похожее на СК.26 по размерам обведено в зелёный кружок
Настоящие вызовы возникают когда разработчик упирается в ограничения, например по габаритам, по нагрузке, которую должен нести сканер. Если сам сканер доставляет к объекту белковый помощник, то нужно сделать оборудование легким и удобным в переноске, к примеру, по вертикальным лестницам, в узких проёмах.
На примере ниже сканер СК.1335 для сварного шва парогенератора АЭС ВВЭР-1000. Он устанавливается на небольшой доступный участок шириной 120 мм и должен нести шесть ультразвуковых датчиков типа фазированной решётки и камеру телевизионного контроля, обеспечивать сканирование по всей доступной поверхности.

Сканер СК.1335 для кольцевого шва парогенератора
Сканер приводится в движение магнитными колёсами, не сбиться с пути ему помогает направляющий трек. Поперёк сварного шва группу датчиков перемещает каретка. Весит такой сканер в сборе со всеми направляющими и прижимами около 12 кг, длину имеет около 750 мм. Когда мне в руки попадают подобные сканеры, мне хочется их сравнить с пулемётом Калашникова, по весу и (желаемой) надежности.
Еще один пример — сканер для контроля сварных соединений роторов паровой турбины. Особенность геометрии такова, что в зазор шириной порядка 200 мм между дисками нужно впихнуть сканер и обеспечить двухкоординатное сканирование. Для фиксации сканера на объекте выбран направляющий поликлиновый ремень, который натягивается храповиком. Из-за своеобразной формы сканер получил наименование сканер “КОНЬ”.

Сканер "Конь"
Решенные технологические проблемы для подобных сканеров и систем:
Точность позиционирования порядка 0,1 мм при использовании сервомоторов (сами сервомоторы и контроллеры к ним швейцарские) или шаговых двигателей (раньше были советские, теперь обычно японские). Такая точность необходимо для применения продвинутых методов обработки исходных данных контроля
При работе с шаговыми двигателями в зависимости от конструкции сканирующего устройства требовалось подбирать диапазон рабочих частот, чтобы не впадать в нежелательный резонанс
Для работы с несколькими сервомоторами удобно использовать CAN BUS
Для компенсации потери координаты из-за прокручивания ведущих колёс по объекту иногда применяются внешние энкодеры, для того чтобы давать обратную связь о фактически пройденном пути
При работе с вращающимися частями при перемещении 16-канального зонда внутри 15-метрового канала в системе СК.26 применяются многоканальные токосъемники, которые несколько портят качество сигнала, однако позволяют выявлять дефекты на требуемом уровне чувствительности
Для ряда систем контроля применяются радиационно-стойкие видеокамеры
Подводные роботы
Для обследования корпусов судов применяется подводный робот, разработанный в МВТУ им. Баумана. Робот имеет восемь винтов, может маневрировать в подводном положении.
Пристыковавшись к корпусу судна за счет прижимного винта, робот перемещается по обшивке с помощью колёс.
Робот несёт и зачистную машинку для подготовки “пятачка” для ультразвуковой толщинометрии.

Подводный робот МВТУ
Стационарные комплексы для контроля
В описанных выше случаях робот или сам добирается до объекта контроля или его приносят его биологические помощники, но есть еще и вариант, когда объект контроля приходит к роботу сам, например по технологической линии или загружается краном.
К таким комплексам относятся различные системы контроля труб, колёсных пар подвижного состава, дисков, валов, колец и прутков. Контакт между датчиками и объектом может быть воздушный с зазором, струйный, щелевой, иммерсионный. Реже встречается вариант непосредственного контакта датчика и объекта.
При иммерсионном контроле изделие целиком погружается в ванну, а приводы вращают изделие и перемещают датчики по заданной траектории. В простейшем виде подобная система планшетного типа собирается из стандартных компонентов — алюминиевые направляющие и сервоприводы. Но если требуется увеличить число степеней свободы, то система становится сложнее. Система ультразвукового контроля авиационных дисков УКД-1200 имеет 5 степеней свободы и шестая это вращение планшайбы с диском.
Система иммерсионного контроля дисков УКД-1200 Комплекс контроля колёсных пар "Пеленг-Автомат"
Решенные технологические задачи для подобных систем:
Высокая скорость движения объекта контроля (более 100 мм/с) для обеспечения требуемой производительности
Перемещение датчиков по траектории, считанной из CAD модели объекта
Автоматическая сортировка изделий на дефектные и бездефектные
Краскопульты для автоматической маркировки дефектных участков
"Акустический глаз" в иммерсионных системах для выставления точного расстояния от ультразвуковых датчиков до поверхности объекта
Программное обеспечение для управления роботами
В этой области всё достаточно сложно, потому что каждый производитель создает собственную систему и пишет собственный софт. Насколько мне известно, не сложилось единого стандарта управления, унификация есть только по формату сигналов энкодеров, которые передаются в дефектоскопы.
Общие принципы, которые закладываются в программное обеспечение для автоматизированных систем в неразрушающем контроле:
диагностика приводов при включении
выполнение заранее заданной программы перемещения и режим ручного управления
обнуление точки отсчета и задание направления осей перемещения
калибровка энкодеров непосредственно на объекте контроля
наблюдение за процессом движения по телевизионному изображению, совмещённому изображению 3D модели робота и объекта
Заключение
За пределами рассмотрения осталось то, в чем я совсем не имею опыта — различные дроны — крылатые и с пропеллерами, насколько я знаю, они применяются в России для диагностики трасс трубопроводов. Мне также неизвестно о российских разработках универсальных промышленных роботов. Буду рад, если такие разработки существуют. Могу сказать, что таким роботам-рукам точно найдется применение в области неразрушающего контроля.
Надо понимать, что средства доставки и перемещения датчиков это лишь половина задачи автоматизированного неразрушающего контроля, вторая половина это разработка методики и алгоритмов обработки данных. Но об этом не расскажешь вкратце, хотя я готов сделать обзор наиболее интересных алгоритмов.
Выводы
Потребности российской промышленности в роботизированном неразрушающем контроля есть и продолжают расти, учитывая что во многих отраслях (Газпром, Росатом и другие) на уровне нормативных документов приоритет отдается автоматизированным методам неразрушающего контроля
В борьбе за снижение влияния человеческого фактора, для увеличения производительности и информативности контроля применяется разнообразное оборудование, в том числе и разработанное в России; это вполне соответствует понятию Индустрия 4.0 (а точнее, NDT 4.0)
Разработчики стараются оснастить роботов наибольшим количеством датчиков, реализующих разные виды контроля одновременно
Разработчикам также есть чем заняться дальше — всегда актуальна задача сделать перемещение быстрее, точнее, самих роботов сделать меньшего размера или увеличить их автономность
Не претендовав на 100% освещение всех разработок, я упомянул разработки государственных и частных компаний: "Алтек", "АКС", "Кропус", "МВТУ им. Баумана", "Никимт-Атомстрой", "ЭХО+". Если читатель посчитает нужным дополнить мой обзор, приглашаю в комментарии или готов принять их лично.

Настоящая статья посвящена дальнейшему развитию робототехники для трубопроводов коммунального хозяйства, а именно созданию ТВ-роботов для адресного прецизионного ремонта трубопроводов.
Робототехнический комплекс для ремонта трубопроводов монтируется в автомобиле, в котором размещается пост управления, электрогенератор, кабельный барабан и другое оборудование. Комплекс может быть оснащен датчиком пути и системой ввода видеостроки, а также компьютерной системой документирования. Для удобства загрузки ремонтного робота в трубопровод предусмотрен специальный подъемный механизм (рис. 2).
Видеодиагностика трубопровода. Внутренняя телеинспекция трубопровода, проводимая цветной телекамерой с высокой разрешающей способностью, дает информацию о состоянии трубопровода. Робот с такой телекамерой обнаруживает даже небольшие трещины и течи, засоры и посторонние предметы; определяет точное местоположение и характер дефекта, состояние трубопровода вокруг дефекта для принятия решения о локальном ремонте или о замене участка трубопровода.
Локальный ремонт трубопроводов. Если в трубопроводе имеется дефект, находящийся под автомагистралью, железной дорогой, трамвайными путями или под речным переходом, раскопка в месте дефекта вызывает большие сложности. В этом случае возможен ремонт при помощи робота, вводимого в трубу в более удобном месте, расположенном на расстоянии в несколько десятков или сотен метров от дефекта. Перед заделкой робот выполняет локальную зачистку места дефекта фрезами, щетками или специальными составами. В ходе ремонта робот накладывает на внутреннюю поверхность трубы кольцевой бандаж (полосу специальной ткани, пропитанной полимерным составом), надежно перекрывающий утечку. Впервые такие бандажи были установлены при аварийных работах в действующих сетях водоснабжения в начале 1996 г., время, прошедшее с тех пор, позволяет сделать вывод о надежности метода.
Устранение выступающих элементов. Присутствующие в коммунальных трубопроводах выступающие элементы: стальные или деревянные ремонтные штыри, элементы катодной защиты, грат на сварных швах (в водопроводе, газопроводе и нефтепроводе), выступающие внутрь домовые вводы (в канализации) уменьшают проходное сечение трубопровода, способствуют образованию засоров и препятствуют проведению санации трубопроводов любым из известных методов. Устранение таких элементов возможно при помощи фрезерного робота, способного подрезать стальные, чугунные, керамические и прочие элементы и зачищать сварные швы от грата. Применение роботов для решения данной задачи особенно актуально, если дефект находится под автомагистралью, трамвайными или железнодорожными путями и другими подобными объектами.
Вскрытие боковых отводов после санации. При восстановлении старых трубопроводов путем их внутренней облицовки пластиком за один проход санируется участок протяженностью от 50 до 500 м. На данном участке возможно наличие боковых отводов, которые после проведения внутренней облицовки основной трубы пластиком оказываются заглушенными. Для восстановления работоспособности всей трубопроводной системы необходимо проделать отверстие в новой пластиковой облицовке в месте бокового отвода при помощи ремонтного робота с фрезерной головкой.
Удаление из труб посторонних предметов. Практика обследований коммунальных сетей Москвы при помощи телевизионных роботов позволяет сделать вывод о наличии в трубопроводах большого количества посторонних предметов, которые не только засоряют трубопровод и сокращают его проходное сечение, но и могут в ряде случаев приводить к аварийным ситуациям и к необходимости замены элементов трубопровода. Например, камень, находящийся под задвижкой, препятствует перекрытию задвижки и фактически требует ее замены. Для удаления посторонних предметов из трубопроводов перспективно использовать ремонтно-осмотровые роботы, оснащенные манипулятором и накопительным поддоном.
Выводы
В настоящее время, когда остро стоят проблемы безраскопочных методов ремонта трубопроводов, на-прямую связанные с экологией го-рода и высокой загруженностью ав-тотранспортных магистралей, ремонтные роботы для трубопроводов находят все более широкое применение, а высокая рентабельность отечественных робототехнических комплексов привлекает к ним внимание как крупных муниципальных предприятий, так и независимых подрядных организаций.

15с. В реферате рассмотрено современное состояние развития электрофизических методов обработки и показана возможность их роботизации.
Имеются разделы:
Современное состояние развития электрофизических методов обработки и возможность их роботизации.
Роботизированные установки для напыления тонкослойных покрытий на поверхность листового материала.
Список литературы. 3 ист.
Аншин С.С., Бабич А.В. Проектирование и разработка промышленных роботов
- формат djvu
- размер 3.07 МБ
- добавлен 09 октября 2008 г.
С. С. Аншин, А. В. Бабич, А. Г. Баранов и др.; Под общ. ред. Я. А. Шифрина, П. Н. Белянина. — М.: Машиностроение, 1989г. —272 с. — (Автоматические манипуляторы и робототехнические системы). В книге отражен опыт проектирования и разработки серийно выпускаемых в СССР промышленных роботов (ПР). Изложены принципы построения ПР, методы их расчета, конструирования и проектирования. Описано устройство ряда отечественных ПР и даны их характеристики. Рас.
Бансявичюс Р.Ю., Иванов А.А. Промышленные роботы для миниатюрных изделий
- формат djvu
- размер 2.99 МБ
- добавлен 05 апреля 2009 г.
Р. Ю. Бансявичюс, А. А. Иванов, Н. И. Камышный и др.; Под ред. В. Ф. Шаньгина. —М,: Машиностроение, 1985г. — 264 с. — (Автоматические манипуляторы и робототехнические системы). В книге освещен опыт создания и применения сверхлегких промышленных роботов для манипулирования миниатюрными объектами. Рассмотрены управляемые роботы, функционирующие в составе технологического оборудования и исследовательских комплексов. Описаны варианты их структурной.
Бурдаков С.Ф., Дьяченко В.А., Тимофеев А.Н. Проектирование манипуляторов промышленных роботов и роботизированных комплексов
- формат djvu
- размер 2.74 МБ
- добавлен 04 мая 2009 г.
Воротников С.А. Информационные устройства робототехнических систем
- формат djvu
- размер 22.36 МБ
- добавлен 27 сентября 2010 г.
Малахов М.В., Нейбергер Н.А., Сидорин Г.Н. Монтаж, наладка, эксплуатация и ремонт промышленных роботов
- формат djvu
- размер 4.35 МБ
- добавлен 21 сентября 2011 г.
М.: Металлургия, 1989. - 224 с.: ил. Промышленные роботы и роботизированные комплексы: общие сведения; подготовка производства к использованию; порядок и правила монтажа, наладки и эксплуатации и ремонта механических,информационных систем, электро-, пневмо- и гидрооборудования, устройств управления. Практические примеры.
Малахов М.В., Нейбергер Н.А., Сидорин Г.Н. Монтаж, наладка, эксплуатация и ремонт промышленных роботов
- формат pdf
- размер 23.1 МБ
- добавлен 21 сентября 2011 г.
М.: Металлургия, 1989. - 224 с.: ил. Промышленные роботы и роботизированные комплексы: общие сведения; подготовка производства к использованию; порядок и правила монтажа, наладки и эксплуатации и ремонта механических,информационных систем, электро-, пневмо- и гидрооборудования, устройств управления. Практические примеры.
Мачульский И.И., Запятой В.П., Майоров Ю.П. и др. Робототехнические системы и комплексы
- формат djvu
- размер 4.03 МБ
- добавлен 21 августа 2009 г.
Учеб. пособие для вузов/ И. И. Мачульский, В. П. Запятой, Ю, П. Майоров и др.; Под ред. И. И. Мачульского. М.: Транспорт, 1999г. — 446 с. Приведены теоретические основы робототехники и общие сведения о манипуляторах и роботах, основы создания систем автоматизированного проектирования манипуляционных систем, приводов, передаточных механизмов, захватных устройств и несущих конструкций манипуляторов и робототехнических комплексов больший грузоподъе.
Назаров Х.Н. Робототехнические системы и комплексы
- формат pdf
- размер 2.03 МБ
- добавлен 12 июля 2011 г.
Т.: ТГТУ, 2004 Учебное пособие, 102 стр. Роботы и их применение в робототехнических и гибких производственных системах Математическое описание роботов Робототехнические системы и комплексы Робототехнические комплексы сборочных операций Робототехнические комплексы механической обработки Робототехнические комплексы кузнечно - прессовых операций Робототехнические комплексы литейного производства и гальванопокрытий Роботизированные сварочные комплекс.
Реферат - Использование планетарных передач и мехатронных моделей в робототехнике
- формат doc
- размер 25.06 МБ
- добавлен 05 ноября 2010 г.
МГТУ им. Н. Э. Баумана, 16 стр. Факультет "Робототехника и Комплексная автоматизация (РК)" Специальность "Робототехнические системы (РК-10)" Дисциплина "Проектирование и Конструирование Мобильных Роботов (ПКМР)", 4 курс Содержание: Мехатронный модуль Преимущества мехатронных модулей Обобщенная структура мехатронной системы Методика расчета универсального мехатронного модуля Планетарные передачи Распространённые передачи КПД планетарных передач.
Тимофеев А.В. Адаптивные робототехнические комплексы
- формат djvu
- размер 2.68 МБ
- добавлен 16 сентября 2008 г.
Л.: Машиностроение. Ленингр. отд-ние, 1988г. — 332 с. В книге изложены принципы, методы и средства конструирования адаптивных робототехнических комплексов (РТК). Рассмотрены вопросы гибкого программирования и адаптивного управления РТК. Описаны различные типы манипуляционных и транспортных роботов, станков и обрабатывающих центров с микропроцессорными системами адаптивного управления. Рассмотрены особенности систем адаптивного контроля и перспе.
Читайте также: