
Реферат способы регулирования скорости
Обновлено: 04.07.2024
Общая характеристика способов пуска асинхронных двигателей, их классификация, достоинства и недостатки. Условия для выбора метода и расчет необходимых показателей. Аспекты регулирования скорости вращения двигателя с короткозамкнутым и фазным ротором.
| Рубрика | Производство и технологии |
| Вид | реферат |
| Язык | русский |
| Дата добавления | 10.04.2009 |
| Размер файла | 2,3 M |
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
ПУСК ТРЕХФАЗНЫХ АСИНХРОННЫХ ДВИГАТЕЛЕЙ И РЕГУЛИРОВАНИЕ ИХ СКОРОСТИ ВРАЩЕНИЯ
1. Способы пуска асинхронных двигателей
Общая характеристики вопроса. Прямой пуск. При рассмотрений возможных способен пуска и ход асинхронных двигателей необходимо учитывать следующие основные положения: 1) двигатель должен развивать при пуске достаточно большой пусковой момент, который должен быть больше статического момента сопротивления на валу, чтобы ротор двигателя мог прийти во вращение и достичь номинальной скорости вращения; 2) пусковой ток должен быть ограничен таким значением, чтобы не происходило повреждения двигателя и нарушения нормального режима работы сети; 3) схема пуска должна быть по возможности простой, а число и стоимость пусковых устройств -- малыми.
При пуске асинхронного двигателя на холостом ходу в активном сопротивлении его вторичной цепи выделяется тепловая энергия, равная кинетической энергии приводимых во вращение маховых масс, а при пуске под нагрузкой количество выделяемой энергии соответственно увеличивается. Выделение энергии в первичной цепи обычно несколько больше, чем во вторичной. При частых пусках, а также при весьма тяжелых условиях пуска, когда маховые массы приводимых в движение механизмов велики, возникает опасность перегрева обмоток двигателя. Подробно динамика движения электропривода и энергетические соотношения при пуске рассматриваются в курсах электропривода. Число пусков асинхронного двигателя в час, допустимое по условиям его нагрева, тем больше, чем меньше номинальная мощность двигателя и чем меньше соединенные с его валом маховые массы. Двигатели мощностью 3--10 кВт в обычных условиях допускают до 5--10 включений в час.
Асинхронные двигатели с короткозамкнутым ротором проще по устройству и обслуживанию, а также дешевле и надежнее в работе, чем двигатели с фазным ротором.
Поэтому всюду, где это возможно, применяются двигатели с короткозамкнутым ротором и подавляющее большинство находящихся в эксплуатации асинхронных двигателей являются двигателями с короткозамкнутым ротором.
Наиболее простым способом пуска двигателя с короткозамкнутым ротором является включение обмотки его статора непосредственно в сеть, на номинальное напряжение обмотки статора
При этом пусковой ток двигателя Iп = (4 - 7) Iн.
Современные асинхронные двигатели с короткозамкнутым ротором проектируются с таким расчетом, чтобы они по значению возникающих при пуске электродинамических усилий, действующих на обмотки, и по условиям нагрева обмоток допускали прямой пуск. Поэтому прямой пуск всегда возможен, когда сеть достаточно мощна и пусковые токи двигателей не вызывают недопустимо больших падений напряжения в сети (не более 10--15%). Современные энергетические системы, сети и сетевые трансформаторные подстанции обычно имеют токмо мощности, что в подавляющем большинстве случаев возможен прямой пуск асинхронных двигателей.
Нормальным способом пуска двигателей с короткозамкнутым ротором поэтому является прямой пуск.
Нередко таким образом осуществляется пуск двигателей мощностью в тысячи киловатт.
Поэтому эти способы пуска применимы, когда возможен пуск, двигателя на холостом ходу или под неполной нагрузкой.
Для весьма мощных двигателей применяются также реакторы без ферромагнитного сердечника, с обмотками, укрепленными на бетонном каркасе.
Выключатель В1 выбирается на такую отключающую мощность, которая позволяет отключить двигатель при глухом коротком замыкании за выключателем, а выключатель * В2 может иметь низкую отключающую мощность. Если составляющие сопротивления короткого замыкания двигателя равны rк и хк, то начальный пусковой ток при прямом пуске
а при реакторном пуске, при пренебрежении активным сопротивлением реактора,
Следовательно,, при реакторном пуске "начальный" пусковой ток уменьшается в
раз. Во столько же раз уменьшается также напряжение на зажимах двигателя в начальный момент пуска. Начальный пусковой момент при реакторном пуске Мп.р уменьшается по сравнению с моментом при прямом пуске Мп.п в
Если пусковой автотрансформатор понижает пусковое напряжение двигателя к kат раз, то пусковой ток в двигателе или на стороне НН автотрансформатора Iп.д уменьшается также в kат раз, а пусковой ток на стороне ВН автотрансформатора или в сети Iп.с уменьшается в раз. Пусковой момент Мп, пропорциональный квадрату напряжения на зажимах двигателя, уменьшается также в раз.
Таким образом, при автотрансформаторном пуске Мп и Iп.с уменьшаются в одинаковое число раз. В то же время при реакторном пуске пусковой ток двигателей Iп.д является также пусковым током в сети Iп.с и пусковой момент Мп уменьшается быстрее пускового тока (в квадратичном отношении). Поэтому при одинаковых значениях Iп.c при автотрансформаторном пуске пусковой момент будет больше. Однако это преимущество автотрансформаторного пуска достигается ценой значительного усложнения и удорожания пусковой аппаратуры.
Поэтому автотрансформаторный пуск применяется реже реакторного, при более тяжелых условиях, когда реакторный пуск не обеспечивает необходимого пускового момента.
Недостатком этого способа - пуска по сравнению с реакторным и автотрансформаторным являетсй то, что при пусковых переключениях цепь двигателя разрывается, что связана с возникновением коммутационных перенапряжений. Этот способ ранее широко применялся при пуске низковольтных двигателей, однако с увеличением мощности сетей потерял свое прежнее значение и в настоящее время используется сравнительно редко.
Перед пуском щетки должны быть опущены на контактные кольца ротора, а все ступени реостата включены. Далее в процессе пуска
производится переключение реостата на вторую ступень. При этом двигатель будет работать по характеристике 2, и при дальнейшем разбеге двигателя скольжение уменьшится от s = s3 до s = s2, а момент -- от значения М = Ммакс до М = Ммин. Затем производится переключение на первую ступень и т. д. После выключения последней ступени реостата двигатель переходит на работу по естественной характеристике 0 и достигает установившейся скорости. При наличии у двигателя короткозамыкающего механизма после окончания пуска щетки с помощью этого механизма поднимаются с контактных колец и кольца замыкаются накоротко, а реостат возвращается и пусковое положение. Тем самым пусковая аппаратура приводится в готовность к следующему пуску. Необходимо отметить, что дистанционное управление короткозамыкающим механизмом контактных колец сложно осуществить; это затрудняет автоматическое управление двигателем. Поэтому в последнее время фазные асинхронные двигатели строятся без таких механизмов. При этом щетки постоянно налегают на контактные кольца, что несколько увеличивает потери двигателя и износ щеток. Число ' ступеней пускового реостата с целью упрощения схемы пуска и удешевления аппаратуры в автоматизированных установках выбирается небольшим (обычно 2--3 ступени).
Пусковые характеристики асинхронного двигателя при реостатном пуске наиболее благоприятны, так как высокие значения моментов достигаются при невысоких значениях пусковых токов.
Самозапуск асинхронных двигателей. В электрических сетях в результате, коротких замыканий случаются кратковременные, длительностью до нескольких секунд, большие понижения напряжения или перерывы питания. Включенные в сеть асинхронные двигатели при этом начинают затормаживаться и чаще всего полностью останавливаются. При восстановлении напряжения начинается одновременный самозапуск не отключившихся от сети двигателей. Такой самозапуск двигателей способствует быстрейшему восстановлению нормальной работы производственных механизмов и поэтому целесообразен, а в ряде случаев даже чрезвычайно желателен. Однако одновременный самозапуск большого числа асинхронных двигателей загружает сеть весьма большими токами, что вызывает в ней большие падения напряжения и задерживает процесс восстановления нормального напряжения. Время самозапуска двигателей при этом увеличивается, а в ряде случаев значение пускового момента недостаточно для пуска двигателя. Кроме того самозапуск некоторых двигателей в подобных условиях недопустим или невозможен (например, двигатели с фазным ротором с пуском с помощью реостата и двигатели с короткозамкнутым ротором с пуском с помощью реакторов и автотрансформаторов, не снабженные специальной автоматической аппаратурой для автоматического самозапуска). Поэтому целесообразно возможность самозапуска использовать только для двигателей наиболее ответственных производственных механизмов, а все остальные двигатели снабдить релейной защитой для их отключения от сети при глубоких падениях напряжения.
Самозапуск асинхронных двигателей широко применяется для двигателей механизмов электрических станций.
2. Регулирование скорости вращения асинхронных двигателей с короткозамкнутым ротором
Скорость вращения ротора асинхронного двигателя
1) регулирование скорости вращения первичного магнитного поля
что достигается либо регулированием первичной частоты f1, либо изменением числа пар полюсов р двигателя;
2) регулирование скольжения двигателя s при n1 = соnst.
В первом случае к. п. д. двигателя остается высоким, а во втором случае к. п. д. снижается тем больше, чем больше s, так как при этом мощность скольжения (см. § 24-5)
теряется во вторичной цепи двигателя (мощность скольжения используется полезно только в каскадных установках).
Рассмотрим здесь главнейшие способы регулирования скорости вращения.
Регулирование скорости изменением первичной частоты (частотное регулирование) требует применения источников питания с регулируемой частотой (синхронные генераторы с переменной скоростью вращения, ионные или полупроводниковые преобразователи частоты и др.). Поэтому данный способ регулирования используется главным образом в случаях, когда для целых групп двигателей необходимо повышать (n > 3000 об/мин) скорости вращения (например, ручной металлообрабатывающий инструмент, некоторые механизмы деревообрабатывающей промышленности и др.) или одновременно и плавно их регулировать (например, двигатели рольгангов мощных прокатных станов и др.). С развитием полупроводниковых преобразователей все более перспективным становится также индивидуальное частотное регулирование скорости вращения двигателей. Схему короткозамкнутого асинхронного двигателя с частотным управлением при помощи полупроводниковых преобразователей можно получить, если на схеме рис. 11-14 заменить явно-полюсный ротор па ротор с обмоткой в виде беличьей клетки и питать эту схему от сети переменного тока через полупроводниковый выпрямитель. Управление инвертором при этом производится особым преобразователем частоты вне зависимости от положения ротора двигателя. Напряжение регулируется с помощью выпрямителя.
Если пренебречь относительно-небольшим падением напряжения в первичной цепи асинхронного двигателя, то
Отступление от этого правила целесообразно только в случаях, когда Мст быстро уменьшается с уменьшением n (например, приводы вентиляторов, когда Мст ~ ). В этом случае более быстрое уменьшение U по сравнению с f1 вызывает уменьшение Ф и улучшает энергетические показатели двигателя (и к. п. д.) и в то же время уменьшение Мт с точки зрения перегрузочной способности не опасно.
При широком диапазоне регулирования правильнее поддерживать
К недостаткам частотного регулирования относится громоздкость и высокая стоимость питающей установки.
Регулирование скорости изменением числа пар полюсов р используется обычно для двигателей с короткозамкнутым ротором, так как при этом требуется изменять р только для обмотки статора. Изменять р можно двумя способами: 1) применением на статоре нескольких обмоток, которые уложены в общих пазах и имеют разные числа пар полюсов р; 2) применением обмотки специального ' типа, которая позволяет получить различные значения р путем изменения (переключения) схемы соединений обмотки. Предложено значительное количество различных схем обмоток с переключением числа пар полюсов, однако широкое распространение из них получили только некоторые. Применение нескольких обмоток невыгодно, так как при этом из-за ограниченного места в пазах сечение проводников каждой из обмоток нужно уменьшать, что приводит к снижению мощности двигателя. Использование обмоток с переключением числа пар полюсов вызывает усложнение коммутационной аппаратуры, в особенности, если с помощью одной обмотки желают получить более двух скоростей вращения. Несколько ухудшаются также энергетические показатели двигателей.
Двигатели с изменением числа пар полюсов называются многоскоростными. Обычно они выпускаются на 2, 3 или 4 скорости вращения, причем двухскоростные двигатели изготовляются с одной обмоткой на статоре и с переключением числа пар полюсов в отношении р2 : p1 == 2 : 1, трехскоростные двигатели- с двумя обмотками на статоре, из которых одна выполняется с переключением р2 : р1 = 2 : 1, четырехскоростные двигатели -- с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Например, двигатель на f1 = 50 Гц с синхронными скоростями вращения 1500/1000/750/ /500 об/мин имеет одну обмотку с переключением на 2р = 4 и 8 и другую обмотку с переключением на 2p=6 и 12.
Многоскоростные двигатели применяются в металлорежущих и деревообрабатывающих станках, в грузовых и пассажирских лифтах, для приводов вентиляторов и насосов и в ряде других случаев.
Ширина фазной зоны, занимаемой сторонами катушек катушечной группы, и шаг обмотки в зубцовых делениях одинаковы при обоих числах полюсов. Поскольку, однако, при переключении числа пар полюсов в отношении 2 : 1 полюсное деление изменяется в два раза, то величина фазной зоны в электрических градусах и относительный шаг обмотки при этом также изменяются в два раза.
Переключаемую обмотку выполняют так, что при меньшем числе пар полюсов (р1) фазная зона б== 60° эл. Тогда при удвоенном числе пар полюсов (р2 =2р1) ширина этой зоны будет б = 120° эл.
Из сказанного следует, что обмотка с переключением числа полюсов создает н. с. с большим значением бьющих гармоник поля,
При переключении многоскоростной обмотки магнитные индукции на отдельных участках магнитной цепи в общем случае изменяются, что необходимо иметь в виду при проектировании двигателя, чтобы, с одной стороны, добиться по возможности более полного использования
материалов двигателя, а с другой -- не допустить чрезмерного насыщения магнитной цепи.
Масса и стоимость многоскоростных двигателей несколько больше, чем у нормальных асинхронных двигателей такой же мощности.
Регулирование скорости уменьшением первичного напряжения.
Следует учитывать, что во вторичной цепи возникают потери, равные мощности скольжения Рs и вызывающие повышенный нагрев ротора. Этот метод регулирования скорости применяется также для двигателей с фазным ротором, причем в этом случае в цепь ротора включаются добавочные сопротивления.
Каскад асинхронного двигателя с машиной постоянного тока.
Выпрямитель преобразовывает переменный ток частоты скольжения f2 = sf1 во вторичной цепи АД в постоянный ток в цепи якоря МПТ. Э. д. с. якоря МПТ в данном случае и является той рассмотренной выше добавочной э. д. с. Ед, которая (в данном случае с помощью выпрямителя В) вводится во вторичную цепь двигателя АД. Регулирование этой э. д. с. и скорости вращения АД производится путем регулирования тока побуждения МПТ.
также остается при всех скоростях постоянной и равной номинальной мощности. В связи с этим электромеханический каскад иногда условно называют также каскадом постоянной мощности. Необходимая номинальная мощность вспомогательной машины каскада (в данном случае МПТ) зависит от пределов регулирования скорости:
Рассмотрим возможные способы регулирования скорости асинхронных двигателей (см. рис.6.1). Скорость двигателя определяется двумя параметрами: скоростью вращения электромагнитного поля статора ω0 и скольжением s:
ω = ω0 – ω0s (6.1)

Рис.6.1. Классификация способов регулирования асинхронных двигателей
Исходя из (6.1) принципиально возможны два способа регулирования скорости: регулирование скорости вращения поля статора и регулирование скольжения при постоянной величине ω0.
Скорость вращения поля статора определяется двумя параметрами (см.3.3): частотой напряжения, подводимого к обмоткам статора _f1, и числом пар полюсов двигателя рп. В соответствии с этим возможны два способа регулирования скорости: изменение частоты питающего напряжения посредством преобразователей частоты, включаемых в цепь статора двигателя (частотное регулирование), и путем изменения числа пар полюсов двигателя.
Регулирование скольжения двигателя при постоянной скорости вращения поля статора для короткозамкнутых асинхронных двигателей возможно путем изменения величины напряжения статора при постоянной частоте этого напряжения. Для асинхронных двигателей с фазным ротором, кроме того, возможны еще два способа: введение в цепь ротора добавочных сопротивлений (реостатное регулирование) и введение в цепь ротора добавочной регулируемой э.д.с. посредством преобразователей частоты, включаемых в цепь ротора (асинхронный вентильный каскад и двигатель двойного питания).
плавность регулирования и высокая жесткость механических характеристик, что позволяет регулировать скорость в широком диапазоне;
экономичность регулирования, определяемая тем, что двигатель работает с малыми величинами абсолютного скольжения, и потери в двигателе не превышают номинальных.
Изменение скорости переключением числа пар полюсов асинхронного двигателя позволяет получать несколько (от 2 до 4) значений рабочих скоростей, т.е. плавное регулирование скорости и формирование переходных процессов при этом способе невозможно. Поэтому данный способ имеет определенные области применения, но не может рассматриваться, как основа для построения систем регулируемого электропривода.
Регулирование скорости асинхронного двигателя изменением величины питающего напряжения при постоянной (стандартной) его частоте для асинхронных двигателей с короткозамкнутым ротором имеет ограниченное применение вследствие того, что регулирование скорости здесь сопряжено с потерями энергии скольжения, выделяющимися в роторе двигателя и ведущими к его перегреву. Получаемые при этом способе механические характеристики неблагоприятны для качественного регулирования. Диапазон регулирования не превышает 1,5:1; более глубокое регулирование скорости можно допускать только кратковременно. Исходя из данной оценки, регулирование изменением величины питающего напряжения применяется, главным образом, только для обеспечения плавного пуска нерегулируемых асинхронных электроприводов или для кратковременного снижения скорости. Иногда этот способ регулирования используется для регулирования скорости насосов и вентиляторов (механизмов с вентиляторным характером нагрузки) небольшой мощности (до 15 кВт), однако и в этом случае необходимо увеличение установленной мощности двигателя.
Для асинхронных двигателей с фазным ротором регулирование скорости может производиться воздействием на роторную цепь двигателя. При введении добавочного сопротивления в цепь ротора энергия скольжения рассеивается не в объеме двигателя, а в сопротивлениях. Этот способ регулирования оценивается как неэкономичный. При использовании релейно-контакторных схем исключается плавность регулирования скорости. В настоящее время управление с введением добавочных сопротивлений в цепь ротора используется, в основном, для пуска асинхронных двигателей с фазным ротором. Электроприводы с реостатно-контакторным управлением не рассматриваются нами, как регулируемые электроприводы.
Все способы регулирования, основанные на изменении скольжения асинхронного двигателя, связаны с выделением энергии скольжения в роторной цепи двигателя. В рассматриваемых выше способах эта энергия расходовалась на нагрев обмотки ротора и роторных сопротивлений. Существуют системы регулируемого электропривода, в которых энергия скольжения не теряется в сопротивлениях, а используется полезно – возвращается в питающую сеть, что делает регулирование в этих системах экономичным. К таким системам регулируемого привода относятся асинхронные вентильные каскады и двигатели двойного питания. Особенностью каскадных схем асинхронного привода является ограниченный диапазон регулирования – не больше, чем 2:1. В этом диапазоне каскадные схемы обеспечивают плавное и экономичное регулирование скорости. Такие системы электропривода наиболее целесообразны для мощных турбомеханизмов-насосов и вентиляторов.
4.1. Регулирование скорости изменением числа пар полюсов
Скорость вращения электромагнитного поля статора зависит от числа пар полюсов двигателя рп,, поэтому имеются специальные модификации асинхронных короткозамкнутых двигателей, позволяющие изменять число пар полюсов машины и тем самым получать две или более (3 и 4) рабочие скорости двигателя. Конструктивно изменение числа пар полюсов может быть достигнуто двумя способами. При первом в пазы статора укладываются две или три независимые обмотки с различными значениями рп. При этом значительно увеличиваются габариты двигателей, но возможно получение любого соотношения числа пар полюсов.
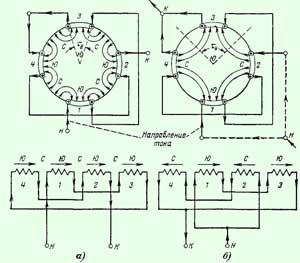
При другом способе используется для получения различного числа пар полюсов одна и та же обмотка, а изменение рп достигается переключением секций этой обмотки. Наибольшее распространение получили две схемы обмоток: звезда ( ) - двойная звезда () и треугольник (Δ) - двойная звезда.
Рассмотрим схему звезда - двойная звезда (см. рис.3.21). В этой схеме каждая из фазных обмоток состоит из двух секций, которые могут включаться параллельно или последовательно. При параллельном соединении напряжение подводится к средним точкам обмоток, а начала обмоток замыкаются между собой. Образуются две параллельно включенные системы обмоток, соединенные в двойную звезду (). Такое соединение соответствует меньшему числу пар полюсов рп. Этой схеме соединения отвечает механическая характеристика с индексом на рис.3.21,б.
При последовательном соединении секций обмоток число пар полюсов увеличивается вдвое, поэтому номинальная скорость двигателя в этом случае будет вдвое меньше. Так, например, если схеме соединения соответствует число пар полюсов рп = 2, то номинальная скорость вращения будет 1470 об/мин (п0 = 1500 об/мин). Переключив обмотки для соединения в звезду ( ), получим рп = 4 и номинальную скорость вращения 735 об/мин (п0 = 750 об/мин).

Рис.3.21. Схема (а) и механические характеристики
(б) двухскоростного асинхронного двигателя со схемой соединения
Поскольку длительно допустимый ток в обмотках должен остаться неизменным, то номинальная мощность на валу двигателя будет:
при схеме Рдв = 3U1 · 2I1н · cosφ1 · ήн,
при схеме Рдв = 3U1 · I1н · cosφ1 · ήн,
Т.е. мощность двигателя при высокой скорости будет примерно в 2 раза выше, чем при низкой скорости. Однако длительно допустимый номинальный момент сохраняется постоянным, т к
Рассмотрим схему треугольник - двойная звезда (рис.3. 22) В этой схеме соединение обмоток двойная звезда соответствует высокой скорости.
При последовательном включении полуобмоток и соединении их в треугольник число пар полюсов увеличивается вдвое, следовательно, вдвое снижается скорость двигателя.

Рис.3.22. Схема и механические характеристики двухскоростного двигателя
Мощность двигателя при этом будет:
здесь U1 – фазное напряжение питания.
Длительно допустимый момент при соединении обмоток в Δ будет в раз больше, чем при соединении в двойную звезду. Таким образом, при обеих схемах соединения двигатель примерно сохраняет свою мощность.
Двух и многоскоростные двигатели применяются в тех случаях, когда по условиям технологии необходимо иметь две или более фиксированные скорости вращения приводного электродвигателя.
4.2 Регулирование скорости АД изменением скольжения
В то же время преднамеренное снижение (регулирование) напряжения, подаваемого на статорные обмотки, иногда используется для регулирования скорости асинхронного двигателя и для обеспечения плавности пуска.
при малом диапазоне снижения скорости относительно номинальной;
при сниженном относительно номинального моменте сопротивления на валу двигателя;
использовании двигателя с повышенным скольжением.
Предположим, что момент сопротивления на валу двигателя остается постоянным и равным номинальному Мс = Мн. При снижении напряжения до величины U12 двигатель будет работать со скоростью, равной ω0 (1 –sр) со скольжениемsр. Мощность скольжения Рsвыделяемая в виде потерь в роторе двигателя будет равна Рs = Мн · ω0 ·sр и пропорциональна заштрихованной площади прямоугольника. Электромагнитная мощность Рэм = Мс · ω0 пропорциональна площади Оаг1, полезная мощность на валу двигателя
Ммех = Мс · ω0 = Мс · ω0 ·(1 –sр) будет пропорциональна площади sрв,г1.

Рис.3.13. Механические характеристики асинхронного двигателя при регулировании напряжения питания а) при постоянном моменте; б) при вентиляторном моменте нагрузки
Поэтому регулирование скорости изменением напряжения питания возможно в том случае, если момент сопротивления Мс при снижении скорости существенно меньше номинального. Такой способ регулирования применяется иногда для привода насосов и вентиляторов, у которых момент сопротивления на валу резко снижается при уменьшении скорости. Этот случай рассмотрен на рис.3.13,6. Поскольку со снижением скорости Мс уменьшается примерно в квадрате от величины снижения скорости, то мощность скольжения Рs со снижением скорости растет не столь существенно. Если нагрузка на валу двигателя носит вентиляторный характер, то максимальная величина мощности скольжения составляет 15% от мощности на валу при номинальной скорости. Поэтому для привода вентиляторов и насосов достаточно увеличение установленной мощности двигателя с повышенным скольжением в 1,5-2 раза.
4.3. Регулирование скорости асинхронного двигателя в каскадных схемах его включения
Регулирование скорости АД при использовании некоторых рассмотренных способов сопровождается выделением в цепи ротора потерь мощности ΔР2 = Мω0s, что значительно снижает экономические показатели асинхронного ЭП.
Первые схемы, в которых полезно использовалась энергия потерь, создавалась путем специального соединения АД с другими электрическими машинами. Поэтому эти схемы получили название каскадных: "В настоящее время существуют схемы, использующие энергию скольжения АД без добавочных электрических машин, а с помощью полупроводниковых приборов и трансформаторов. Однако эти схемы также называют каскадными.
В общем случае каскадными называют такие схемы включения АД, которые, обеспечивая регулирование его скорости, позволяют одновременно полезно использовать энергию потерь в роторе.

Рис. 5.31. Схемы электромеханического (а) и электрического
(б) вентильно-машинных каскадов
По способу использования этой энергии различают схемы электромеханического машинно-вентильного каскада и электрического каскада.
В электромеханическом машинно-вентильном каскаде (рис. 5.31, а) обмотка ротора АД 2, приводящего в движение рабочую машину 1, подключается к трехфазному неуправляемому выпрямителю 4, собранному на полупроводниковых вентилях. К выводам выпрямителя присоединен якорь вспомогательной машины 3 постоянного тока, ЭДС которой Ев м направлена навстречу ЭДС выпрямителя Ев. АД 2 и машина 3 соединены одним валом..
Если пренебречь потерями в схеме, то можно установить, что рабочей машине 1 передается вся электромагнитная мощность Рэм. Действительно, на вал от АД 2 поступает мощность
Р2 = Мω, от вспомогательной машины 3— мощность РВ М= ΔР2 = = Мω0s, в результате суммарная механическая мощность на валу рабочей машины РР М = Р2 + Рв м = Мω + Мω0s = Мω0 = Рэм.
В электрическом каскаде (рис. 5.31,6) в отличие от электромеханического вспомогательная машина 3 не имеет механической связи с АД 2, а соединена одним валом с синхронным генератором 5, подключенным к сети переменного тока. За счет этого I, энергия потерь передается не на вал рабочей машины 1, а с помощью генератора 5 отдается в сеть, а рабочей машине передается только механическая мощность Р2 = Мω.
Рассмотрим регулирование скорости в каскадных схемах, которое происходит за счет изменения ЭДС Евм вспомогательной машины 3 за счет воздействия на ток возбуждения IВ этой машины.
Предположим, что при работе ЭП в установившемся режиме происходит увеличение тока возбуждения IВ. Это повлечет за собой увеличение ЭДС Евм и вследствие этого уменьшение выпрямленного.
тока Id, который определяется выражением
Уменьшение Id и тем самым тока ротора АД 2 вызовет снижение его момента, который станет меньше момента нагрузки Мс, создаваемого рабочей машиной 1. В результате скорость двигателя начнет снижаться, а его скольжение и ЭДС роторной обмотки Е2 = Е2кs начнут возрастать. Увеличение ЭДС ротора приведет к увеличению тока ротора и тем самым момента АД, который вновь станет равным моменту нагрузки, и скорость АД перестанет изменяться. Двигатель опять будет работать в установившемся режиме, но уже при более низкой скорости. В случае уменьшения тока Iв скорость АД будет возрастать.
Из механических характеристик электромеханического каскада для разных значений токов Iв (рис. 5.32, а) видно, что максимальный, момент по мере снижения скорости каскада возрастает, поскольку по мере увеличения тока возбуждения вспомогательной машины ее момент также возрастает. При этом максимальная механическая мощность каскада, определяемая произведением максимального момента на соответствующую этому моменту скорость, при I разных токах возбуждения вспомогательной машины 1 примерно одинакова. Поэтому электромеханический каскад называют каскадом постоянной мощности.

Рис. 5.32. Механические характеристики электромеханического (а) и электрического (в) каскадов: 1—4—соответственно при Iв = 0; 0,2; 0,4
При токе возбуждения вспомогательной машины, близком к нулю, механическая характеристика (рис. 5.32, б) электрического каскада близка к естественной характеристике АД. По мере увеличения тока возбуждения искусственные характеристики 2—4 располагаются ниже естественной 1, причем номинальному току возбуждения Iв ном соответствует самая низкая характеристика. Максимальный момент каскада, определяемый только АД 2 (см. рис. 5.31), сохраняется на разных характеристиках примерно постоянным. Поэтому электрический каскад называют каскадом постоянного момента.
В настоящее время в связи с широким распространением силовых тиристорных преобразователей появилась возможность заменять ими электромашинные вращающиеся преобразователи. В частности, электромашинный агрегат 3—5 (см. рис. 5.31,6) представляет собой преобразователь энергии постоянного тока, поступающей от выпрямителя 4, в энергию переменного тока, отдаваемую в сеть. Такой машинный агрегат может быть заменен на статический преобразователь "частоты, состоящий из трансформатора 2 и инвертора 3 (рис. 5:33). К обмотке ротора АД 1 подключен неуправляемый выпрямитель 5 и инвертор 3, а также реактор 4, который служит для сглаживания пульсаций выпрямленного тока. Асинхронный ЭП по схеме рис. 5.33 получил название асинхронного вентильного каскада.
Инвертор, представляет собой преобразователь энергии постоянного тока в энергию переменного тока. Электродвижущую силу инвертора можно регулировать аналогично тому, как регулируется ЭДС машины постоянного тока. Поэтому механические характеристики асинхронного вентильного каскада аналогичны характеристикам вентильно-машинного электрического каскада.

Рис 5.33. Схема асинхронного винительного каскада
Существует много схем асинхронных вентильных каскадов, аналогичных рассмотренной. Эти схемы несколько отличаются по своей сложности, техническим возможностям регулирования скорости, энергетическим показателям и т. д: Однако принцип действия и назначение этих схем аналогичны: использование энергии скольжения для .совершения, полезной работы и возможность плавного регулирования скорости АД.
Отметим основные показатели регулирования скорости АД в каскадных схемах включения.
Асинхронный двигатель является наиболее массовым электрическим двигателем. Эти двигатели выпускаются мощностью от 0,1 кВт до нескольких тысяч киловатт и находят применение во всех отраслях хозяйства. Основным достоинством асинхронного двигателя является простота его конструкции и невысокая стоимость. Однако по принципу своего действия асинхронный двигатель в обычной схеме включения не допускает регулирования скорости его вращения. Особое внимание следует обратить на то, что во избежание значительных потерь энергии, а, следовательно, для короткозамкнутых асинхронных двигателей во избежание перегрева его ротора, двигатель должен работать в длительном режиме с минимальными значениями скольжения.
Рассмотрим возможные способы регулирования скорости асинхронных двигателей (см. рис.1). Скорость двигателя определяется двумя параметрами: скоростью вращения электромагнитного поля статора ω0 и скольжением s:

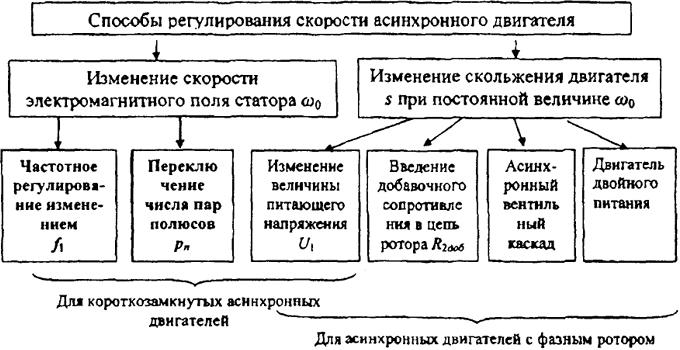
Рис.1. Классификация способов регулирования асинхронных двигателей
Исходя из (1) принципиально возможны два способа регулирования скорости: регулирование скорости вращения поля статора и регулирование скольжения при постоянной величине ω0.
Скорость вращения поля статора определяется двумя параметрами (см.3.3): частотой напряжения, подводимого к обмоткам статора f1, и числом пар полюсов двигателя рп. В соответствии с этим возможны два способа регулирования скорости: изменение частоты питающего напряжения посредством преобразователей частоты, включаемых в цепь статора двигателя (частотное регулирование), и путем изменения числа пар полюсов двигателя.
Регулирование скольжения двигателя при постоянной скорости вращения поля статора для короткозамкнутых асинхронных двигателей возможно путем изменения величины напряжения статора при постоянной частоте этого напряжения. Для асинхронных двигателей с фазным ротором, кроме того, возможны еще два способа: введение в цепь ротора добавочных сопротивлений (реостатное регулирование) и введение в цепь ротора добавочной регулируемой э.д.с. посредством преобразователей частоты, включаемых в цепь ротора (асинхронный вентильный каскад и двигатель двойного питания).
В настоящее время благодаря развитию силовой преобразовательной техники созданы и серийно выпускаются различные виды полупроводниковых преобразователей частоты, что определило опережающее развитие и широкое применение частотно-регулируемого асинхронного электропривода. Основными достоинствами этой системы регулируемого электропривода являются:
- плавность регулирования и высокая жесткость механических характеристик, что позволяет регулировать скорость в широком диапазоне;
- экономичность регулирования, определяемая тем, что двигатель работает с малыми величинами абсолютного скольжения, и потери в двигателе не превышают номинальных.
Недостатками частотного регулирования являются сложность и высокая стоимость (особенно для приводов большой мощности) преобразователей частоты и сложность реализации в большинстве схем режима рекуперативного торможения.
Подробно принципы и схемы частотного регулирования скорости асинхронного двигателя рассмотрены ниже.
Изменение скорости переключением числа пар полюсов асинхронного двигателя позволяет получать несколько (от 2 до 4) значений рабочих скоростей, т.е. плавное регулирование скорости и формирование переходных процессов при этом способе невозможно.
Поэтому данный способ имеет определенные области применения, но не может рассматриваться, как основа для построения систем регулируемого электропривода.

Почти все станки в качестве электропривода оснащаются асинхронными двигателями. У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем (редукторы, шкивы), что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя.
Для некоторых узлов автоматического оборудования подходит именно электрическое регулирование скорости вращения вала асинхронного электродвигателя. Только так можно добиться плавной и точной настройки рабочих режимов. Существует несколько способов управления частотой вращения путём манипуляций с частотой, напряжением и формой тока. Все они показаны на схеме.
Из представленных на рисунке способов, самыми распространёнными для регулирования скорости вращения ротора являются изменение следующих параметров:
· напряжения подаваемого на статор,
· вспомогательного сопротивления цепи ротора,
· числа пар полюсов,
· частоты рабочего тока.
Последние два способа позволяют изменять скорость вращения без значительного снижения КПД и потери мощности, остальные способы регулировки способствуют снижению КПД пропорционально величине скольжения. Но и у тех и других есть свои преимущества и недостатки. Поскольку чаще всего на производстве применяются асинхронные двигатели с короткозамкнутым ротором, то все дальнейшие обсуждения будут касаться именно этого типа электродвигателей.
Для частотного регулирования применяют в основном полупроводниковые преобразователи. Их принцип действия основан на особенности работы асинхронного двигателя, где частота вращения магнитного поля статора зависит от частоты напряжения питающей сети. Скорость вращения поля статора определяется по следующей формуле:
n1 = 60f/p, где n1 — частота вращения поля (об/мин), f-частота питающей сети (Гц), p-число пар полюсов статора, 60 — коэффициент пересчета мерности.
Для эффективной работы асинхронного электродвигателя без потерь нужно вместе с частотой изменять и подаваемое напряжение. Напряжение должно меняться в зависимости от момента нагрузки. Если нагрузка постоянная, то напряжение изменяется пропорционально частоте.
Современные частотные регуляторы позволяют уменьшать и увеличивать обороты в широком диапазоне. Это обеспечило их широкое применение в оборудовании с управляемой протяжкой, например, в многоконтактных станках сварной сетки. В них скорость вращения асинхронного двигателя, приводящего в движение намоточный вал, регулируется полупроводниковым преобразователем. Такая регулировка позволяет оператору, следящему за правильностью выполнения технологических операций, ступенчато ускоряться или замедляться по мере настройки станка.
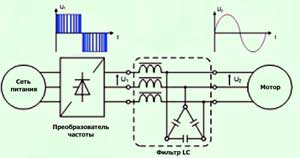
Остановимся на принципе работы преобразователя частоты более подробно. В его основе лежит принцип двойного преобразования. Состоит регулятор из выпрямителя, импульсного инвертора и системы управления. В выпрямителе синусоидальное напряжение преобразуется в постоянное и подаётся на инвертор. В составе силового трёхфазного импульсного инвертора есть шесть транзисторных переключателей. Через эти автоматические ключи постоянное напряжение подаётся на обмотки статора так, что в нужный момент на соответствующие обмотки поступает то прямой, то обратный ток со сдвигом фаз 120°. Таким образом, постоянное напряжение трансформируется в переменное трёхфазное напряжение нужной амплитуды и частоты.
Необходимые параметры задаются через модуль управления. Автоматическая регулировка работы ключей осуществляется по принципу широтно-импульсной модуляции. В качестве силовых переключателей используются мощные IGBT-транзисторы. Они, по сравнению с тиристорами, имеют высокую частоту переключения и выдают почти синусоидальный ток с минимальными искажениями. Не смотря на практичность таких устройств, их стоимость для двигателей средней и высокой мощности остаётся очень высокой.
Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
· укладывание сразу нескольких обмоток с разными числами пар полюсов в общие пазы статора,
· применение специальной намотки с возможностью переключения существующих обмоток под нужное число пар полюсов.
В первом случае чтобы уложить в пазы дополнительные обмотки нужно уменьшить сечение провода, а это приводит к уменьшению номинальной мощности электродвигателя. Во втором случае имеет место усложнение коммутационной аппаратуры, особенно для трёх и более скоростей, а также ухудшаются энергетические характеристики. Более подробно этот и другие способы регулирования скорости асинхронного двигателя описаны в архивном файле, который можно скачать внизу страницы.
Обычно многоскоростные двигатели выпускаются на 2, 3 или 4 скорости вращения, причем 2-х скоростные двигатели выпускаются с одной обмоткой на статоре и с переключением числа пар полюсов в отношении 2 : 1 = р2 : pt , 3-х скоростные двигатели — с двумя обмотками на статоре, из которых одна выполняется с переключением 2 : 1 = Рг : Pi , 4-х скоростные двигатели — с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Многоскоростными электродвигателями оснащаются различные станки, грузовые и пассажирских лифты, они используются для приводов вентиляторов, насосов и т.д.
3. Схема нереверсивного управления пуском трехфазного асинхронного двигателя с фазным ротором.
Контактор 1У срабатывает, и в цепи ротора двигателя останутся включенными сопротивления гр2 + г„3 двух ступеней реостата. Этим начинается второй этап пуска двигателя. Контактор /У приведет в действие сочлененное с ним реле 2РВ, которое через 12 секунд замкнет свой контакт в цепи катушки контактора 2У. Контактор 2У сработает и выключит вторую ступень реостата. В цепи ротора останется включенным только сопротивление грз- Контактор 2У приведет в действие реле ЗРВ и спустя ta секунд замкнется цепь катушки контактора ЗУ. Последний сработает и замкнет обмотки ротора двигателя накоротко, чем и будет завершен процесс пуска двигателя.
4. Внутренние РУ
Распределительное устройство (РУ) — электроустановка, служащая для приёма и распределения электрической энергии одного класса напряжения.
Распределительное устройство содержит набор коммутационных аппаратов, вспомогательные устройства РЗиА и средства учёта и измерения
Читайте также: