
Реферат на тему устройства мягкого пуска асинхронных двигателей
Обновлено: 05.07.2024
- Для учеников 1-11 классов и дошкольников
- Бесплатные сертификаты учителям и участникам
Министерство образовании Рязанской области
Областное государственое бюджетное
профессиональное образовательное учреждением
Асинхронные электродвигатели (АД) находят в народном хозяйстве широкое применение. По разным данным до 70% всей электрической энергии, преобразуемой в механическую энергию вращательного или поступательного движения, потребляется асинхронным двигателем. Электрическую энергию в механическую энергию поступательного движения преобразуют линейные асинхронные электродвигатели, которые широко используются в электрической тяге, для выполнения технологических операций. Широкое применение АД связано с рядом их достоинств.
Асинхронные двигатели - это самые простые в конструктивном отношении и в изготовлении, надежные и самые дешевые из всех типов электрических двигателей. Они не имеют щеточноколлекторного узла либо узла скользящего токосъема, что помимо высокой надежности обеспечивает минимальные эксплуатационные расходы. В зависимости от числа питающих фаз различают трехфазные и однофазные асинхронные двигатели.
Трехфазный асинхронный двигатель при определенных условиях может успешно выполнять свои функции и при питании от однофазной сети. АД широко применяются не только в промышленности, строительстве, сельском хозяйстве, но и в частном секторе, в быту, в домашних мастерских, на садовых участках.
Однофазные асинхронные двигатели приводят во вращение стиральные машины, вентиляторы, небольшие деревообрабатывающие станки, электрические инструменты, насосы для подачи воды. Чаще всего для ремонта или создания механизмов и устройств промышленного изготовления или собственной конструкции применяют трехфазные АД. Причем в распоряжении конструктора может быть как трехфазная, так и однофазная сеть. Возникают проблемы расчета мощности и выбора двигателя для того или другого случая, выбора наиболее рациональной схемы управления асинхронным двигателем, расчета конденсаторов, обеспечивающих работу трехфазного асинхронного двигателя в однофазном режиме, выбора сечения и типа проводов, аппаратов управления и защиты. Такого рода практическим проблемам посвящена предлагаемая вниманию читателя книга. В книге приводится также описание устройства и принципа действия асинхронного двигателя, основные расчетные соотношения для двигателей в трехфазном и однофазном режимах.
Устройство и принцип действия асинхронных электродвигателей
Устройство трехфазных асинхронных двигателей
Трехфазный асинхронный двигатель (АД) традиционного исполнения, обеспечивающий вращательное движение, представляет собой электрическую машину, состоящую из двух основных частей: неподвижного статора и ротора, вращающегося на валу двигателя. Статор двигателя состоит из станины, в которую впрессовывают так называемое электромагнитное ядро статора, включающее магнитопровод и трехфазную распределенную обмотку статора. Назначение ядра - намагничивание машины или создание вращающегося магнитного поля. Магнитопровод статора состоит из тонких (от 0,28 до 1 Мм) изолированных друг от друга листов, штампованных из специальной электротехнической стали. В листах различают зубцовую зону и ярмо (рис. 1.а). Листы собирают и скрепляют таким образом, что в магнитопроводе формируются зубцы и пазы статора (рис. 1.б). Магнитопровод представляет собой малое магнитное сопротивление для магнитного потока, создаваемого обмоткой статора, и благодаря явлению намагничивания этот поток усиливает.

Рис. 1 Магнитопровод статора
В пазы магнитопровода укладывается распределенная трехфазная обмотка статора. Обмотка в простейшем случае состоит из трех фазных катушек, оси которых сдвинуты в пространстве по отношению друг к другу на 120°. Фазные катушки соединяют между собой по схемам звезда, либо треугольник (рис. 2).

Рис 2. Схемы соединения фазных обмоток трехфазного асинхронного двигателя в звезду и в треугольник

Рис. 3. Ротор аснхронного двигателя с короткозамкнутой обмоткой
Общий вид асинхронного двигателя серии 4А представлен на рис. 4 [2]. Ротор 5 напрессовывается на вал 2 и устанавливается на подшипниках 1 и 11 в расточке статора в подшипниковых щитах 3 и 9, которые прикрепляются к торцам статора 6 с двух сторон. К свободному концу вала 2 присоединяют нагрузку. На другом конце вала укрепляют вентилятор 10 (двигатель закрытого обдуваемого исполнения), который закрывается колпаком 12. Вентилятор обеспечивает более интенсивное отведение тепла от двигателя для достижения соответствующей нагрузочной способности. Для лучшей теплоотдачи станину отливают с ребрами 13 практически по всей поверхности станины. Статор и ротор разделены воздушным зазором, который для машин небольшой мощности находится в пределах от 0,2 до 0,5 мм. Для прикрепления двигателя к фундаменту, раме или непосредственно к приводимому в движение механизму на станине предусмотрены лапы 14 с отверстиями для крепления. Выпускаются также двигатели фланцевого исполнения. У таких машин на одном из подшипниковых щитов (обычно со стороны вала) выполняют фланец, обеспечивающий присоединение двигателя к рабочему механизму.

Рис. 4. Общий вид асинхронного двигателя серии 4А
Выпускаются также двигатели, имеющие и лапы, и фланец. Установочные размеры двигателей (расстояние между отверстиями на лапах или фланцах), а также их высоты оси вращения нормируются. Высота оси вращения - это расстояние от плоскости, на которой расположен двигатель, до оси вращения вала ротора. Высоты осей вращения двигателей небольшой мощности: 50, 56, 63, 71, 80, 90, 100 мм.
Принцип действия трехфазных асинхронных двигателей
Выше отмечалось, что трехфазная обмотка статора служит для намагничивания машины или создания так называемого вращающегося магнитного поля двигателя. В основе принципа действия асинхронного двигателя лежит закон электромагнитной индукции. Вращающееся магнитное поле статора пересекает проводники короткозамкнутой обмотки ротора, отчего в последних наводится электродвижущая сила, вызывающая в обмотке ротора протекание переменного тока. Ток ротора создает собственное магнитное поле, взаимодействие его с вращающимся магнитным полем статора приводит к вращению ротора вслед за полями. Наиболее наглядно идею работы асинхронного двигателя иллюстрирует простой опыт, который еще в XVIII веке демонстрировал французский академик Араго (рис. 5). Если подковообразный магнит вращать с постоянной скоростью вблизи металлического диска, свободно расположенного на оси, то диск начнет вращаться вслед за магнитом с некоторой скоростью, меньшей скорости вращения магнита.

Рис. 5. Опыт Араго, объясняющий принцип работы асинхронного двигателя.
Это явление объясняется на основе закона электромагнитной индукции. При движении полюсов магнита около поверхности диска в контурах под полюсом наводится электродвижущая сила и появляются токи, которые создают магнитное поле диска. Читатель, которому трудно представить проводящие контуры в сплошном диске, может изобразить диск в виде колеса со множеством проводящих ток спиц, соединенных ободом и втулкой. Две спицы, а также соединяющие их сегменты обода и втулки и представляют собой элементарный контур. Поле диска сцепляется с полем полюсов вращающегося постоянного магнита, и диск увлекается собственным магнитным полем. Очевидно, наибольшая электродвижущая сила будет наводиться в контурах диска тогда, когда диск неподвижен, и напротив, наименьшая, когда близка к скорости вращения диска. Перейдя к реальному асинхронному двигателю отметим, что короткозамкнутую обмотку ротора можно уподобить диску, а обмотку статора с магнитопроводом - вращающемуся магниту. Однако вращение магнитного поля в неподвижном статоре а осуществляется благодаря трехфазной системе токов, которые протекают в трехфазной обмотке с пространственным сдвигом фаз.
Курсовая работа содержит 27 страниц, 8 рисунков, 3 таблицы, 6 использованных источников.
Асинхронный двигатель, короткозамкнутый ротор, фазный ротор, пусковой реостат, электрические потери, тепловое состояние, эквивалентная мощность, номинальный момент.
Объектом исследования является асинхронный двигатель с фазным ротором.
Цель работы - расчет основных параметров и характеристик АД, изучение пусковых схем.
Курсовая работа содержит расчет асинхронного двигателя 4АК225M6УЗ серии 4А с фазным ротором.
В курсовой работе определена, по заданной нагрузочной диаграмме электропривода, эквивалентная мощность и выбран асинхронный двигатель с фазным ротором. Произведена проверка выбранного двигателя на нагрев по методу средних потерь, а так же проверка на перегрузочную способность при снижении напряжения в сети, расчет теплового режима выбранного двигателя по заданной нагрузочной диаграмме
Определено сопротивление добавочного резистора, который необходимо включить в цепь ротора, выбранного двигателя для снижения частоты вращения на заданную величину при номинальном моменте сопротивления. Построены естественная и реостатная характеристики выбранного двигателя.
Рассчитаны сопротивления секций пускового резистора и потери электрической энергии при реостатном и прямом пуске, начерчены и изучены схемы управления пуском и реверсом асинхронных двигателей.
1.Асинхронные двигатели в системах электропривода
1.1 Параметры задания и выбор варианта задания
1.2 Расчет эквивалентной мощности и выбор АД
1.3 Проверка выбранного двигателя по нагреву
1.4 Проверка на перегрузку при снижении напряжения
1.5 Расчет теплового состояния АД
1.6 Расчет механических характеристик
1.7 Расчет резисторов пускового реостата
1.8 Расчет электрических потерь при пуске двигателя
2.1 Общие положения
2.2 Управление пуском АД с короткозамкнутым ротором
2.3 Управление пуском АД с фазным ротором в функции времени
3 Управление реверсом АД с короткозамкнутым ротором
Асинхронные двигатели широко используются в промышленности благодаря простоте их конструкции, надежности в эксплуатации и сравнительно низкой себестоимости.
Наиболее простыми в отношении устройства и управления, надежными в эксплуатации, имеющими наименьшую массу, габариты и стоимость при определенной мощности, являются асинхронные двигатели с короткозамкнутым ротором. Их масса на единицу мощности в 1,5-2,0 раза ниже, чем у машин постоянного тока. Чаще всего асинхронные двигатели применяются при невысокой частоте включений, когда не регулируют частоту вращения или возможно ступенчатое её регулирование.
В установках, где требуется регулирование частоты вращения в относительно небольших пределах, необходимы плавный пуск, хорошие тормозные качества, ограничение токов в переходных процессах и т.д., находят широкое применение асинхронные двигатели с фазным ротором. Характерной особенностью этих двигателей является возможность уменьшения с помощью реостатов их пусковых токов при одновременном увеличении пускового момента.
При выборе двигателя по мощности следует исходить из необходимости его полного использования в процессе работы. В случае завышения номинальной мощности двигателя снижаются технико-экономические показатели электропривода, т.е. КПД и коэффициент мощности. Если же нагрузка на валу двигателя превышает номинальную, то это приводит к росту токов в его обмотках, а значит и потерь мощности выше соответствующих номинальных значений.
Для обоснованного выбора асинхронного двигателя необходимо знать, как изменяется нагрузка на валу двигателя во времени, что в свою очередь позволяет судить о характере изменения потерь мощности. С целью определения нагрузки двигателя большинства производственных механизмов, строятся так называемые нагрузочные диаграммы, под которыми понимаются зависимости развиваемых двигателем момента и мощности от времени, т.е. M=f(t) и P=f(t).
Различают следующие режимы работы двигателя: продолжительный при постоянной нагрузке на валу двигателя; кратковременный; повторно-кратковременный; ударный (момент статистической нагрузки резко увеличивается по различным законам, а затем снижается до момента холостого хода).
1.1 Параметры задания и выбор варианта задания
Вариант задания выбирается по двузначному шифру, присвоенному студенту преподавателем; для студентов заочной формы обучения – по двум последним цифрам шифра зачетной книжки.
Параметры нагрузки на каждой ступени, синхронная частота вращения АД и требуемое снижение частоты вращения ротора в процентах от номинальной приведены в таблице 1.1, а длительность ступеней – в таблице 1.2.
При расчете принять, что в период паузы (t 5 ) двигатель работает в режиме холостого хода без отключения от сети.
Напряжение питающей (цеховой) сети принять в зависимости от мощности двигателя:
от 22 до 75 кВт – 380 В,
от 45 до 110 кВт – 660 В,
от 45 до 75 кВт – 380 либо 660 В (выбрать по желанию).
Снижение напряжения в питающей сети для проверки выбранного АД на перегрузочную способность принять 10 % от номинального для всех вариантов.
Число ступеней пускового реостата для всех вариантов z = 2.
Таблица 1.1 - Параметры нагрузки
Мощность на ступенях
Синхронная частота вращения,
Таблица 1.2 - Длительность ступеней нагрузки
| Длительность ступеней нагрузки, мин | Предпоследняя цифра варианта (шифра) | |||||||||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| t 1 | 10 | 13 | 12 | 13 | 9 | 6 | 16 | 10 | 11 | 7 |
| t 2 | 5 | 7 | 9 | 8 | 15 | 8 | 6 | 12 | 7 | 14 |
| t 3 | 15 | 9 | 14 | 9 | 8 | 18 | 13 | 15 | 18 | 10 |
| t 4 | 8 | 13 | 8 | 11 | 12 | 10 | 9 | 6 | 9 | 13 |
| t 5 | 7 | 8 | 7 | 4 | 6 | 8 | 6 | 7 | 5 | 6 |
Из приведенных таблиц 1.1 и 1.2 в соответствии с вариантом 08 следует:
мощности на ступенях нагрузки, кВт,
длительность каждой ступени нагрузки, мин,
Синхронная частота вращения АД–1000об/мин. Требуемое снижение частоты вращения на реостатной характеристике Δn=4,5%.
1.2 Расчет эквивалентной мощности и выбор АД
Многоступенчатый график нагрузки, характеризующий длительный переменный режим работы электропривода (рисунок 1), можно привести к равномерному, воспользовавшись понятием эквивалентной (среднеквадратичной) мощности, кВт,

, (1.1)
где Pi – мощность, кВт,
ti – продолжительность нагрузки каждой i-й ступени графика, включая паузу, мин,

кВт.
По каталогу выбираем двигатель 4АК225M6УЗ, имеющий следующие параметры:
номинальная мощность Рн =30 кВт,
номинальное скольжение Sн =3,5%,
КПД в номинальном режиме hн =89%,
кратность номинального момента Km =2,5;
напряжение ротора Uр =140 В,
ток ротора Iр =150А,
постоянная времени нагрева Тн =30 мин,
суммарный момент инерции,
приведенный к валу двигателя J=55×10 -2 кг ×м 2 .
Характеристика двигателя 4АК225M6УЗ: двигатель серии 4А с фазным ротором; исполнение по способу защиты – IP44 – защита от проникновения внутрь оболочки предметов длиной до 80 мм и твердых тел размером свыше 12 мм; степень защиты от проникновения внутрь машины воды 3 ; станина алюминиевая, щиты чугунные; высота оси вращения – 225мм; установочный размер по длине станины средний; число полюсов–6; климатическое исполнение – УЗ, т.е. возможность эксплуатации электрической машины в зоне умеренного климата, в закрытых помещениях.
1.3 Проверка выбранного двигателя по нагреву
Выбор АД гарантирует, что данный двигатель при заданном графике нагрузки удовлетворяет требованиям по нагреву, однако проведем проверку.
Проверка по нагреву производится по методу средних потерь. Для этого вначале определяются потери в номинальном режиме по данным каталога:
Потери в номинальном режиме, кВт,

, (1.2)
где Рн – номинальная мощность выбранного АД, кВт,
ηн – КПД в номинальном режиме по каталогу.

кВт.
Найденные потери являются суммой потерь в меди обмоток статора и ротора, в стали и механических. Будем считать, что механические потери остаются постоянными, тогда сумму потерь разделим на две группы:
-постоянные потери или потери х.х., включающие в себя потери в стали, механические и дополнительные,
-переменные потери в обмотках, изменяющиеся с изменением нагрузки.
В большинстве случаев соблюдаются следующие соотношения:

, (1.3)

, (1.4)
где Pм – потери в меди обмоток при номинальной нагрузке, кВт,
P0 – потери х.х. (постоянные потери), кВт.

кВт,

кВт.
Потери в обмотках являются переменными, они пропорциональны квадрату тока или квадрату коэффициента нагрузки. Исходя из этого:

, (1.5)
где Pi – мощность i-й ступени нагрузки,
Кнi – коэффициент нагрузки i-й ступени.

кВт,

кВт,

кВт,

кВт,

кВт.
Потери на каждой ступени графика нагрузки, кВт,

, (1.6)

кВт,

кВт,

кВт,

кВт,

кВт.
Средние потери за цикл, кВт,

, (1.7)

кВт .
Проверка выбранного двигателя по нагреву заключается в проверке условия:

, (1.8)
Вы можете изучить и скачать доклад-презентацию на тему Устройство плавного пуска асинхронных и синхронных двигателей среднего и высокого напряжения. Презентация на заданную тему содержит 36 слайдов. Для просмотра воспользуйтесь проигрывателем, если материал оказался полезным для Вас - поделитесь им с друзьями с помощью социальных кнопок и добавьте наш сайт презентаций в закладки!


































Курс 2. Устройство плавного пуска асинхронных и синхронных двигателей среднего и высокого напряжения Лектор: к.т.н., доцент Тергемес К.Т.
Прямой пуск. Этот способ применяют для пуска асинхронных двигателей с короткозамкнутым ротором. Двигатели этого типа малой и средней мощности обычно проектируют так, чтобы при непосредственном подключении обмотки статора к сети возникающие пусковые токи не создавали чрезмерных электродинамических усилий и превышений температуры, опасных с точки зрения механической и термической прочности основных элементов машины. Прямой пуск. Этот способ применяют для пуска асинхронных двигателей с короткозамкнутым ротором. Двигатели этого типа малой и средней мощности обычно проектируют так, чтобы при непосредственном подключении обмотки статора к сети возникающие пусковые токи не создавали чрезмерных электродинамических усилий и превышений температуры, опасных с точки зрения механической и термической прочности основных элементов машины. В асинхронных двигателях отношение L/R сравнительно мало (особенно в малых двигателях), поэтому переходный процесс в момент включения характеризуется весьма быстрым затуханием свободного тока. Это позволяет пренебречь свободным током и учитывать только установившееся значение тока переходного процесса. Двигатели обычно пускают с помощью электромагнитного выключателя К - магнитного пускателя (рис. 4.27, а) и разгоняют автоматически по естественной механической характеристике М (рис. 4.27,6) от точки П, соответствующей начальному моменту пуска, до точки Р, соответствующей условию М = Мст. Ускорение при разгоне определяется разностью абсцисс кривых М и Мст и моментом инерции ротора двигателя и механизма, который приводится во вращение. Если в начальный момент пуска Мп
Отношение моментов Мп /Мном = kп.м называют кратностью начального пускового момента. Для двигателей с короткозамкнутым ротором мощностью 0,6—100 кВт ГОСТом установлено kп.м = 1,0÷2,0; мощностью 100-1000 кВт - kп.м = 0,7÷1,0. Отношение моментов Мп /Мном = kп.м называют кратностью начального пускового момента. Для двигателей с короткозамкнутым ротором мощностью 0,6—100 кВт ГОСТом установлено kп.м = 1,0÷2,0; мощностью 100-1000 кВт - kп.м = 0,7÷1,0.
Получение кратностей пускового момента, больших регламентированных ГОСТом, обычно нежелательно, так как это связано либо с увеличением активного сопротивления ротора (см. 4.58), либо с изменением конструкции ротора (см. § 4.11), что ухудшает энергетические показатели двигателя. Получение кратностей пускового момента, больших регламентированных ГОСТом, обычно нежелательно, так как это связано либо с увеличением активного сопротивления ротора (см. 4.58), либо с изменением конструкции ротора (см. § 4.11), что ухудшает энергетические показатели двигателя. Недостатком данного способа пуска кроме сравнительно небольшого пускового момента является также большой бросок пускового тока, в пять — семь раз превышающий номинальное значение тока. Несмотря на указанные недостатки, пуск двигателя путем непосредственного подключения обмотки статора к сети широко применяют благодаря простоте и хорошим технико-экономическим свойствам двигателя с короткозамкнутым ротором — низкой стоимости и высоким энергетическим показателям (η, cos φ1, kм и др.).
Данный способ пуска наиболее эффективен при пуске без нагрузки или при очень слабо загруженном пуске, однако при пуске двигателя под большой нагрузкой его применение невозможно. Большая проблема при данном способе пуска появляется при пуске, например, насосов. Двигатель начнет разгоняться до 80-85 % от номинальной скорости до того, как момент нагрузки сравняется с крутящим моментом двигателя и ускорение прекратится. Для достижения номинальной скорости необходимо переключение на треугольник, которое часто приводит к высоким переходным значениям и большого по амплитуде пикового тока. В некоторых случаях пиковый ток может превышать значение тока при прямом пуске. Кроме того, как и при прямом пуске, единственным способом остановки двигателя при использовании схемы звезда-треугольник является прямой останов. Данный способ пуска наиболее эффективен при пуске без нагрузки или при очень слабо загруженном пуске, однако при пуске двигателя под большой нагрузкой его применение невозможно. Большая проблема при данном способе пуска появляется при пуске, например, насосов. Двигатель начнет разгоняться до 80-85 % от номинальной скорости до того, как момент нагрузки сравняется с крутящим моментом двигателя и ускорение прекратится. Для достижения номинальной скорости необходимо переключение на треугольник, которое часто приводит к высоким переходным значениям и большого по амплитуде пикового тока. В некоторых случаях пиковый ток может превышать значение тока при прямом пуске. Кроме того, как и при прямом пуске, единственным способом остановки двигателя при использовании схемы звезда-треугольник является прямой останов.
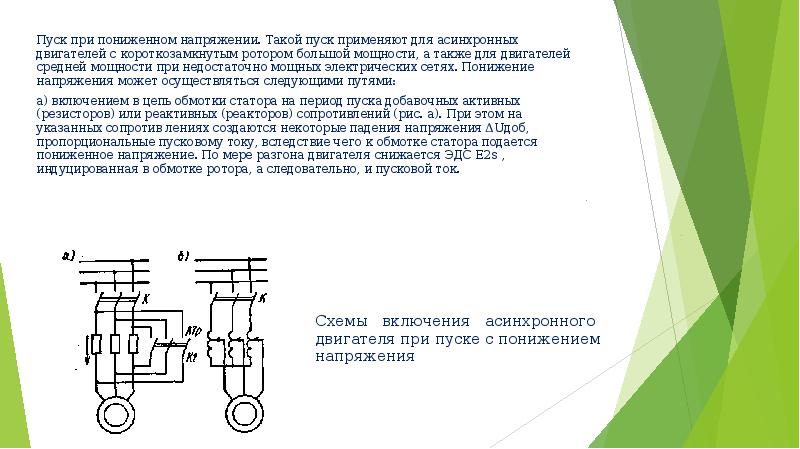
Пуск при пониженном напряжении. Такой пуск применяют для асинхронных двигателей с короткозамкнутым ротором большой мощности, а также для двигателей средней мощности при недостаточно мощных электрических сетях. Понижение напряжения может осуществляться следующими путями: Пуск при пониженном напряжении. Такой пуск применяют для асинхронных двигателей с короткозамкнутым ротором большой мощности, а также для двигателей средней мощности при недостаточно мощных электрических сетях. Понижение напряжения может осуществляться следующими путями: а) включением в цепь обмотки статора на период пуска добавочных активных (резисторов) или реактивных (реакторов) сопротивлений (рис. а). При этом на указанных сопротив лениях создаются некоторые падения напряжения ΔUдоб, пропорциональные пусковому току, вследствие чего к обмотке статора подается пониженное напряжение. По мере разгона двигателя снижается ЭДС Е2s , индуцированная в обмотке ротора, а следовательно, и пусковой ток.
В результате уменьшается падение напряжения ΔUдоб на указанных сопротивлениях и автоматически возрастает приложенное к двигателю напряжение. После окончания разгона добавочные резисторы или реакторы замыкаются накоротко контактором К1 ; В результате уменьшается падение напряжения ΔUдоб на указанных сопротивлениях и автоматически возрастает приложенное к двигателю напряжение. После окончания разгона добавочные резисторы или реакторы замыкаются накоротко контактором К1 ; в) подключением двигателя к сети через понижающий автотрансформатор АТр (рис. б), который может иметь несколько ступеней, переключаемых в процессе пуска соответствующей аппаратурой. Недостатком указанных методов пуска путем понижения напряжения является значительное уменьшение пускового и максимального моментов двигателя, которые пропорциональны квадрату приложенного напряжения, поэтому их можно использовать только при пуске двигателей без нагрузки.
Использование устройства плавного пуска позволяет уменьшить пусковой ток и тем самым избежать падения напряжения в сети. Также при этом уменьшается пусковой крутящий момент и механические воздействия на оборудование, что снижает необходимость в обслуживании и ремонте. Как и привод, устройство плавного пуска может выполнять плавный останов, устраняя гидроудар и скачки давления в насосных системах и позволяя избежать повреждения хрупкого материала на ленточных конвейерах. Использование устройства плавного пуска позволяет уменьшить пусковой ток и тем самым избежать падения напряжения в сети. Также при этом уменьшается пусковой крутящий момент и механические воздействия на оборудование, что снижает необходимость в обслуживании и ремонте. Как и привод, устройство плавного пуска может выполнять плавный останов, устраняя гидроудар и скачки давления в насосных системах и позволяя избежать повреждения хрупкого материала на ленточных конвейерах.
Пуск с помощью реостата в цепи ротора. Этот способ применяют для пуска двигателей с фазным ротором. Если в цепь ротора включить пусковой реостат Rп, то активное сопротивление цепи ротора увеличится, вследствие чего точка К на круговой диаграмме (рис. а) сместится ближе к точке О (точка К'). При этом максимальный момент (отрезок АмЕм) не изменяется, а пусковой момент возрастает от значения Мп до М'п, так как увеличивается отрезок КЕп, пропорциональный этому моменту. Одновременно повышается критическое скольжение, а поэтому зависимость М =f(s) сдвигается в область больших скольжений, а зависимость п2= f(М) — в область меньших частот вращения (рис. б и в, кривые 1—4). Пуск с помощью реостата в цепи ротора. Этот способ применяют для пуска двигателей с фазным ротором. Если в цепь ротора включить пусковой реостат Rп, то активное сопротивление цепи ротора увеличится, вследствие чего точка К на круговой диаграмме (рис. а) сместится ближе к точке О (точка К'). При этом максимальный момент (отрезок АмЕм) не изменяется, а пусковой момент возрастает от значения Мп до М'п, так как увеличивается отрезок КЕп, пропорциональный этому моменту. Одновременно повышается критическое скольжение, а поэтому зависимость М =f(s) сдвигается в область больших скольжений, а зависимость п2= f(М) — в область меньших частот вращения (рис. б и в, кривые 1—4). Для того чтобы пусковой момент был равен максимальному, необходимо так подобрать сопротивление пускового реостата Rп, чтобы точка К' находилась вблизи точки Ам. Это условие выполняется при R'п + R'2 + R1 ≈ X1 + X'2 . Включение сопротивления R пуменьшает также и пусковой ток двигателя, так как в этом случае In = U1 /√(R'n + R'2+ R1 )2 + (X1 + Х'2 )2.
Пусковой реостат имеет обычно три — шесть ступеней (рис. а), что позволяет в процессе пуска постепенно уменьшать пусковое сопротивление, поддерживая высокое значение пуско-вого момента двигателя. Сначала двигатель пускается по характеристике (рис.б), соответствующей сопротивлению Пусковой реостат имеет обычно три — шесть ступеней (рис. а), что позволяет в процессе пуска постепенно уменьшать пусковое сопротивление, поддерживая высокое значение пуско-вого момента двигателя. Сначала двигатель пускается по характеристике (рис.б), соответствующей сопротивлению
Круговая диаграмма при включении реостата в цепь ротора асинхронного двигателя и получаемые при этом механические характеристики Круговая диаграмма при включении реостата в цепь ротора асинхронного двигателя и получаемые при этом механические характеристики
пускового реостата Rп3 = Rдоб1 + Rдоб2 + Rдоб3 , и развивает вращающий момент Мп.mах . По мере увеличения частоты вращения вращающий момент М уменьшается и может стать меньше некоторого момента Mп.min . Поэтому при M = Mп.min часть пускового реостата Rдоб3 выводят, замыкая контактор КЗ . Вращающий момент при этом мгновенно возрастает до Мп.mах , а затем с увеличением частоты вращения изменяется по характеристике 3, соответствующей сопротивлению реостата Rп2 = Rдоб1 + Rдоб2 . При дальнейшем уменьшении момента М до Mп.min часть реостата Rдоб2 снова выключается контактором К2 и двигатель переходит на работу по характеристике 2, соответствующей сопротивлению Rп1 = Rдоб1 . Таким образом, при постепенном (ступенчатом) уменьшении сопротивления пускового реостата вращающий момент двигателя изменяется от Мп.mах до Mп.min , а частота вращения возрастает по ломаной кривой, показанной на рис. б, жирной линией. пускового реостата Rп3 = Rдоб1 + Rдоб2 + Rдоб3 , и развивает вращающий момент Мп.mах . По мере увеличения частоты вращения вращающий момент М уменьшается и может стать меньше некоторого момента Mп.min . Поэтому при M = Mп.min часть пускового реостата Rдоб3 выводят, замыкая контактор КЗ . Вращающий момент при этом мгновенно возрастает до Мп.mах , а затем с увеличением частоты вращения изменяется по характеристике 3, соответствующей сопротивлению реостата Rп2 = Rдоб1 + Rдоб2 . При дальнейшем уменьшении момента М до Mп.min часть реостата Rдоб2 снова выключается контактором К2 и двигатель переходит на работу по характеристике 2, соответствующей сопротивлению Rп1 = Rдоб1 . Таким образом, при постепенном (ступенчатом) уменьшении сопротивления пускового реостата вращающий момент двигателя изменяется от Мп.mах до Mп.min , а частота вращения возрастает по ломаной кривой, показанной на рис. б, жирной линией.
В конце пуска пусковой реостат полностью выводят контактором К1, обмотка ротора замыкается накоротко, и двигатель переходит на работу по естественной характеристике 1. Выключение отдельных ступеней пускового реостата в процессе разгона двигателя может осуществляться вручную или автоматически. Таким образом, посредством реостата, включенного в цепь ротора, можно осуществить пуск двигателя при Mп ≈ Мmах и резко уменьшить пусковой ток. В конце пуска пусковой реостат полностью выводят контактором К1, обмотка ротора замыкается накоротко, и двигатель переходит на работу по естественной характеристике 1. Выключение отдельных ступеней пускового реостата в процессе разгона двигателя может осуществляться вручную или автоматически. Таким образом, посредством реостата, включенного в цепь ротора, можно осуществить пуск двигателя при Mп ≈ Мmах и резко уменьшить пусковой ток. На рис. (в), в показан характер изменения тока I1 и частоты вращения n2 при пуске двигателя рассматриваемым способом. Ток также изменяется по ломаной кривой между двумя крайними значениями Imах и Imin. Недостатком данного способа является его относительная сложность и необходимость применения более дорогих двигателей с фазным ротором. Кроме того, указанные двигатели имеют несколько худшие рабочие характеристики, чем двигатели с короткозамкнутым ротором такой же мощности (кривые η и cos φ1 проходят ниже). В связи с этим двигатели с фазным ротором применяют только при тяжелых условиях пуска, когда необходимо развивать максимально возможный пусковой момент.
Неподвижная часть машины называется статор, подвижная – ротор. Сердечник статора набирается из листовой электротехнической стали и запрессовывается в станину. На рис. 2.1 показан сердечник статора в сборе. Станина (1) выполняется литой, из немагнитного материала. Чаще всего станину выполняют из чугуна или алюминия. На внутренней поверхности листов (2), из которых выполняется сердечник статора, имеются пазы, в которые закладывается трёхфазная обмотка (3). Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения, реже – из алюминия.
Обмотка статора состоит из трёх отдельных частей, называемых фазами. Начала фаз обозначаются буквами с1, с2, с3, концы – с4, с5, с6.

Начала и концы фаз выведены на клеммник (рис. 2.2 а), закреплённый на станине. Обмотка статора может быть соединена по схеме звезда (рис. 2.2 б) или треугольник (рис. 2.2 в). Выбор схемы соединения обмотки статора зависит от линейного напряжения сети и паспортных данных двигателя. В паспорте трёхфазного двигателя задаются линейные напряжения сети и схема соединения обмотки статора. Например, 660/380, Y/∆. Данный двигатель можно включать в сеть с Uл = 660В по схеме звезда или в сеть с Uл =380В – по схеме треугольник.
Основное назначение обмотки статора – создание в машине вращающего магнитного поля.

Сердечник ротора (рис. 2.3 б) набирается из листов электротехнической стали, на внешней стороне которых имеются пазы, в которые закладывается обмотка ротора. Обмотка ротора бывает двух видов: короткозамкнутая и фазная. Соответственно этому асинхронные двигатели бывают с короткозамкнутым ротором и фазным ротором (с контактными кольцами).

Доливо-Добровольский первым создал двигатель с короткозамкнутым ротором и исследовал его свойства. Он выяснил, что у таких двигателей есть очень серьёзный недостаток – ограниченный пусковой момент. Доливо-Добровольский назвал причину этого недостатка – сильно закороченный ротор. Им же была предложена конструкция двигателя с фазным ротором.
На рис. 2.4 приведен вид асинхронной машины с фазным ротором в разрезе: 1 – станина, 2 – обмотка статора, 3 – ротор, 4 – контактные кольца, 5 – щетки.

У фазного ротора обмотка выполняется трёхфазной, аналогично обмотке статора, с тем же числом пар полюсов. Витки обмотки закладываются в пазы сердечника ротора и соединяются по схеме звезда. Концы каждой фазы соединяются с контактными кольцами, закреплёнными на валу ротора, и через щётки выводятся во внешнюю цепь. Контактные кольца изготавливают из латуни или стали, они должны быть изолированы друг от друга и от вала. В качестве щёток используют металлографитовые щётки, которые прижимаются к контактным кольцам с помощью пружин щёткодержателей, закреплённых неподвижно в корпусе машины. На рис. 2.5 приведено условное обозначение асинхронного двигателя с короткозамкнутым (а) и фазным (б) ротором.

На рис. 2.6 приведен вид асинхронной машины с короткозамкнутым ротором в разрезе: 1 – станина, 2 – сердечник статора, 3 – обмотка статора, 4 – сердечник ротора с короткозамкнутой обмоткой, 5 – вал.

На щитке машины, закреплённом на станине, приводятся данные: Рн, Uн, Iн, nн, а также тип машины.
Рн – это номинальная полезная мощность (на валу)
Uн и Iн – номинальные значения линейного напряжения и тока для указанной схемы соединения. Например, 380/220, Y/∆, IнY/Iн∆.
nн – номинальная частота вращения в об/мин.
Тип машины, например, задан в виде 4AH315S8. Это асинхронный двигатель (А) четвёртой серии защищённого исполнения. Если буква Н отсутствует, то двигатель закрытого исполнения.
315 – высота оси вращения в мм;
S – установочные размеры (они задаются в справочнике);
8 – число полюсов машины.
Получение вращающегося магнитного поля
наличие не менее двух обмоток;
токи в обмотках должны отличаться по фазе
оси обмоток должны быть смещены в пространстве.
В трёхфазной машине при одной паре полюсов (р=1) оси обмоток должны быть смещены в пространстве на угол 120°, при двух парах полюсов (р=2) оси обмоток должны быть смещены в пространстве на угол 60° и т.д.
Рассмотрим магнитное поле, которое создаётся с помощью трёхфазной обмотки, имеющей одну пару полюсов (р=1) (рис. 2.7). Оси обмоток фаз смещены в пространстве на угол 120° и создаваемые ими магнитные индукции отдельных фаз (BA, BB, BC) смещены в пространстве тоже на угол 120°.
Магнитные индукции полей, создаваемые каждой фазой, как и напряжения, подведённые к этим фазам, являются синусоидальными и отличаются по фазе на угол 120°.
Приняв начальную фазу индукции в фазе А (φA) равной нулю, можно записать:


Магнитная индукция результирующего магнитного поля определяется векторной суммой этих трёх магнитных индукций.

Найдём результирующую магнитную индукцию (рис. 2.8) с помощью векторных диаграмм, построив их для нескольких моментов времени.

а) При

t=0


б) При




в) При



Как следует из рис. 2.8, магнитная индукция B результирующего магнитного поля машины вращается, оставаясь неизменной по величине. Таким образом, трёхфазная обмотка статора создаёт в машине круговое вращающееся магнитное поле. Направление вращения магнитного поля зависит от порядка чередования фаз. Величина результирующей магнитной индукции

Частота вращения магнитного поля n0 зависит от частоты сети f и числа пар полюсов магнитного поля р.
n0 = (60 f) / p, [об/мин].
Обратите внимание, что частота вращения магнитного поля не зависит от режима работы асинхронной машины и её нагрузки.
При анализе работы асинхронной машины часто используют понятие о скорости вращения магнитного поля ω0, которая определяется соотношением:
ω0 = (2 π f) / p = π n0 / 30, [рад/сек].
Режимы работы трёхфазной асинхронной машины
Асинхронная машина может работать в режимах двигателя, генератора и электромагнитного тормоза.
Режим двигателя
Этот режим служит для преобразования потребляемой из сети электрической энергии в механическую.

Пусть под действием электромагнитного момента ротор начал вращаться с частотой вращения магнитного поля (n = n0). При этом в обмотке ротора ЭДС E2 будет равна нулю. Ток в обмотке ротора I2 = 0, электромагнитный момент M тоже станет равным нулю. За счёт этого ротор станет вращаться медленнее, в обмотке ротора появится ЭДС, ток. Возникнет электромагнитный момент. Таким образом, в режиме двигателя ротор будет вращаться несинхронно с магнитным полем. Частота вращения ротора будет изменяться при изменении нагрузки на валу. Отсюда появилось название двигателя – асинхронный (несинхронный). При увеличении нагрузки на валу двигатель должен развивать больший вращающий момент, а это происходит при снижении частоты вращения ротора. В отличие от частоты вращения ротора частота вращения магнитного поля не зависит от нагрузки. Для сравнения частоты вращения магнитного поля n0 и ротора n ввели коэффициент, который назвали скольжением и обозначили буквой S. Скольжение может измеряться в относительных единицах и в процентах.
S = (n0 – n) / n0 или S = [(n0 – n) / n0] 100%
При пуске в ход асинхронного двигателя n=0, S=1. В режиме идеального холостого хода n = n0, S=0. Таким образом, в режиме двигателя скольжение изменяется в пределах:
0 n0). Этот режим может наступить, например, при регулировании частоты вращения ротора.
Пусть n > n0. При этом изменится (по сравнению с режимом двигателя) направление ЭДС и тока ротора, а также изменится направление электромагнитной силы и электромагнитного момента (рис. 2.10). Машина начинает развивать на валу тормозной момент (потребляет механическую энергию) и возвращает в сеть электрическую энергию (изменилось направление тока ротора, т.е. направление передачи электрической энергии).

Таким образом, в режиме генератора скольжение изменяется в пределах:
Режим электромагнитного тормоза
Этот режим работы наступает, если ротор и магнитное поле вращаются в разные стороны. Этот режим работы имеет место при реверсе асинхронного двигателя, когда изменяют порядок чередования фаз, т.е. изменяется направление вращения магнитного поля, а ротор по инерции вращается в прежнем направлении.
Согласно рис. 2.11 электромагнитная сила будет создавать тормозной электромагнитный момент, под действием которого будет снижаться частота вращения ротора, а затем произойдёт реверс.
В режиме электромагнитного тормоза машина потребляет механическую энергию, развивая на валу тормозной момент, и одновременно потребляет из сети электрическую энергию. Вся эта энергия идёт на нагрев машины.

Таким образом, в режиме электромагнитного тормоза скольжение изменяется в пределах:
0 > R2, угол ψ2 близок к 90° (рис. 2.13 а).

За счет малого cosψ2 в момент пуска в ход асинхронные двигатели имеют ограниченный пусковой момент. Кратность пускового момента (по сравнению с номинальным) у них составляет
Мпуск / Mн = 0,8 ÷ 1,8.
Причем большие цифры относятся к двигателям специальной конструкции с улучшенными пусковыми свойствами.
По мере разгона ротора двигателя частота тока ротора падает, уменьшается индуктивное сопротивление ротора Х2S и угол ψ2 уменьшается (рис. 2.13 б). Это приводит к увеличению вращающего момента и дальнейшему разгону двигателя.
Подставим в выражение для электромагнитного момента соотношения для I2, cosψ2 и Ф, полученные ранее:
,


где: ктр – коэффициент трансформации асинхронной машины.
Выразим Е2 =E1 / ктр, а Е1 приравняем к напряжению U1, подведенному к обмотке статора (Е1≈U1). В результате получим другое выражение для электромагнитного момента, которое удобно использовать при анализе работы машины, при построении ее характеристик

Из полученного выражения для электромагнитного момента следует, что он сильно зависит от подведенного напряжения (М). При снижении, например, напряжения на 10%, электромагнитный момент снизится на 19% (М. Это является одним из недостатков асинхронных двигателей, так как приводит на производстве к снижению производительности труда и увеличению брака.
Зависимость электромагнитного момента от скольжения
Выражение для электромагнитного момента (*) справедливо для любого режима работы и может быть использовано для построения зависимости момента от скольжения при изменении последнего от +∞ до -∞ (рис. 2.14).

Рассмотрим часть этой характеристики, соответствующая режиму двигателя, т.е. при скольжении, изменяющемся от 1 до 0. Обозначим момент, развиваемый двигателем при пуске в ход (S=1) как Мпуск. Скольжение, при котором момент достигает наибольшего значения, называют критическим скольжением Sкр, а наибольшее значение момента – критическим моментом Мкр. Отношение критического момента к номинальному называют перегрузочной способностью двигателя
Мкр / Mн = λ = 2 ÷ 3.
Из анализа формулы (*) на максимум можно получить соотношения для Мкр и Sкр

Критический момент не зависит от активного сопротивления ротора, но зависит от подведенного напряжения. При уменьшении U1 снижается перегрузочная способность асинхронного двигателя.

Если в эту формулу подставить вместо М и S номинальные значения момента и скольжения (Мн и Sн), то можно получить соотношение для расчета критического скольжения.

Участок характеристики (рис. 2.14), на котором скольжение изменяется от 0 до Sкр, соответствует устойчивой работе двигателя. На этом участке располагается точка номинального режима (Мн, Sн). В пределах изменения скольжения от 0 до Sкр изменение нагрузки на валу двигателя будет приводить к изменению частоты вращения ротора, изменению скольжения и вращающего момента. С увеличением момента нагрузки на валу частота вращения ротора станет меньше, что приведет к увеличению скольжения и электромагнитного (вращающего) момента. Если момент нагрузки превысит критический момент, то двигатель остановится.
Участок характеристики, на котором скольжение изменяется от Sкр до 1, соответствует неустойчивой работе двигателя. Этот участок характеристики двигатель проходит при пуске в ход и при торможении.
1 Электротехника: Учебник для неэлектротехнических специальностей вузов/ Зейдель Х.Э., Коген-Далин В.В., Крымов В.В. и др.; Под ред. В.Г. Герасимова. – М.: Высш. шк., 1985. – 480 с., ил.
2 Данилов А.И., Иванов П.М. Общая электротехника с основами электроники: Учебное пособие для студентов неэлектротехнических специальностей средних специальных учебных заведений. – 4-е изд., стер. – М.: Высш. шк., 2000. – 752 с., ил.
3 Липатов Д.Н. Вопросы и задачи по электротехнике для программированного обучения: Учеб. пособие для студентов вузов. – 3-е изд., испр. и доп. – М.: Энергоатомизадт, 1984. – 360 с., ил.
5 Электротехника с основами электроники: Руководство к лабораторным работам на стендах ЭВ-4/ Составители: Н.П. Блинова, Г.И. Волович, Ю.А. Губочкин, Г.П. Дубовицкий, И.М. Коголь, В.П. Кормухов, Г. А Машихина, Л.В. Мурзина, Л.В. Розенфельд, А.Я. Эргард, В.Я. Яковлев; Под ред. В.П. Кормухова. – Челябинск: ЧГТУ, 1992. – 67 с., ил.
6 Электротехника, электроника, электрооборудование: Методические указания к выполнению лабораторных работ / Составители: Волков Ю.К., Дубовицкий Г.П., Клиначёв Н.В., Коголь И.М., Кормухов В.П. и д.р.; Под редакцией Губочкина Ю.А. – Челябинск: ЮУрГУ, 1999.
7 Титце У., Шенк К. Полупроводниковая схемотехника: Справочное руководство/ Пер. с нем. – М.: Мир, 1982.
8 Хоровиц П., Хилл У. Искусство схемотехники: В 3 т./ Пер. с англ. – М.: Мир, 1993
Читайте также: