
Реферат на тему шасси рулевое управление тормоза
Обновлено: 02.07.2024
Для осуществления движения транспортного средства (ТС) по выбираемой водителем траектории служит рулевое управление (РУ), конструкция которого во многом определяет безопасность движения и утомляемость водителя. К рулевому управлению ТС предъявляются специфические требования, основными из которых являются:
- обеспечение высокой маневренности ТС
- легкость управления (за счет применения усилителей рулевого управления)
- обеспечение по возможности чистого качения (без бокового скольжения) всех колес ТС при поворотах (за счет правильной конструкции привода)
- автоматическая стабилизация управляемых колес, т.е. возвращение их в состояние прямолинейного движения после снятия воздействия со стороны водителя
- необратимость рулевого управления — отсутствие передачи ударов управляемых колес о неровности дороги на руки водителя
- обеспечение следящего действия (любое воздействие водителя на рулевое управление должно вызывать соответствующее изменение направления движения)
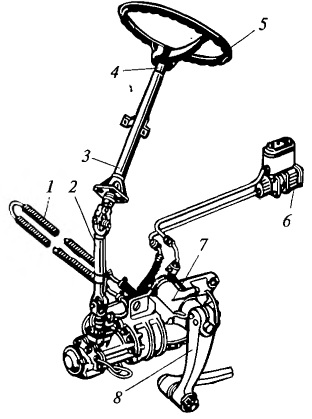
Рис. Рулевое управление:
1 — масляный радиатор; 2, 4 — валы; 3 — рулевая колонка; 5 — рулевое колесо; 6 — насос гидроусилителя руля; 7 — рулевой механизм; 8 — сошка
Система рулевого управления представляет собой совокупность устройств, служащих для поворота управляемых колес автомобиля при воздействии водителя на рулевой управляющий орган (рулевое колесо).
Устройство рулевого управления
Рассмотрим устройство рулевого управления колесных машин с управляемыми колесами. Конструктивно рулевое управление состоит из:
- рулевого механизма;
- усилителя;
- рулевого привода.
Компоновка рулевого управления грузового автомобиля с управляемыми колесами первой оси (КамАЗ, МАЗ) показана на рисунке. Использование регулируемых рулевых колонок позволяет менять угол наклона ступенчато, как правило, с шагом 5° в пределах до 40°. Рулевое управление с передними управляемыми колесами применяется у двух- и трехосных автомобилей. Компоновка и конструкция рулевого управления сравнительно просты и принципиально могут быть сведены к схемам, приведенным на рисунке.
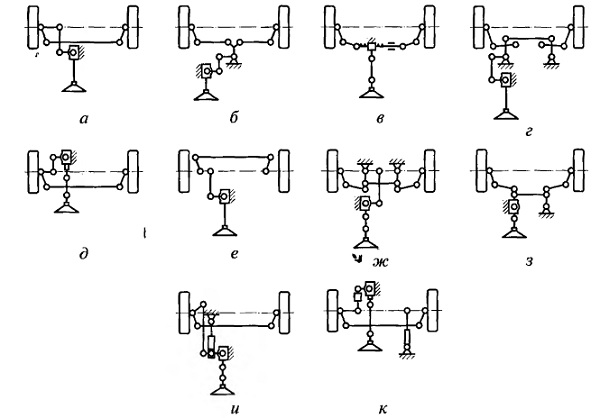
Рис. Схемы рулевого управления автомобилей с управляемыми колесами передней оси:
а — с задней неразрезной трапецией; б — с разрезной трапецией и маятниковым рычагом; в — с реечным рулевым механизмом; г — с разрезной трапецией и двумя маятниковыми рычагами; д — с расчлененным рулевым валом; е — с передней неразрезной трапецией; ж — с разрезной трапецией и двумя маятниковыми рычагами, направленными назад; з — с неразрезной трапецией и одним маятниковым рычагом; и — с неразрезной трапецией и объединенным рулевым усилителем; к — с неразрезной трапецией и раздельным рулевым усилителем
На четырехосных автомобилях чаще всего устанавливают рулевое управление с поворотом колес первой и второй осей, первой и четвертой, либо всех осей.
Для многоосных (шестиосных) шасси большой грузоподъемности используют рулевое управление с поворотом колес первых трех осей (в последних схемах для повышения маневренности применяют поворотные колеса самоустанавливающегося типа на шестой оси). При прямолинейном движении автомобиля самоустанавливающиеся колеса, связанные друг с другом приводом, блокируются специальным устройством. При движении в повороте с повышенной кривизной траектории эти колеса разблокируются и свободно поворачиваются в режиме слежения.
Рулевое управление служит для изменения направления движения автомобиля. При неподвижной передней оси изменение направления движения автомобиля осуществляется поворотом передних управляемых колес.
Для того чтобы при движении автомобиля на повороте колеса его имели качение без бокового скольжения, они должны катиться по окружностям, описанным из одного центра, который называется центром поворота. В этом центре О (рис. 1) должны пересекаться продолжения осей всех колес. Для соблюдения данного условия внутреннее к центру поворота управляемое колесо должно поворачиваться круче, т. е. на больший угол, чем наружное колесо. Для одновременного поворота колес на необходимые различные углы служит рулевая трапеция.
В трапецию входят (рис. 2, а) передняя ось 5, рулевые рычаги 3 и 6, соединенные с поворотными кулаками 1 и 7, и поперечная рулевая тяга 4. Поворотные кулаки шарнирно соединены с осью шкворнями 2.
При повороте одного колеса через рычаги 3 и 6 и тягу 4 поворачивается и другое колесо. При этом вследствие изменения положения поперечной тяги 4 относительно передней оси внутреннее к центру поворота колесо поворачивается на угол а (рис. 2, б), больший, чем угол Р поворота наружного колеса.
Правильность соотношения угла а и Р поворота колес обеспечивается соответствующим подбором угла наклона рулевых рычагов к продольной оси автомобиля и длины рулевых рычагов и поперечной тяги.
Кроме трапеции в рулевое управление входят (рис. 3) рулевое колесо / с валом 3, установленным в рулевой колонке 2, и рулевой механизм 4, заключенный в картер, а также рулевая сошка 5, продольная рулевая тяга 6, рулевой рычаг 7 продольной тяги.
При повороте рулевого колеса / в ту или другую сторону вместе с ним вращается вал 3, приводя в действие рулевой механизм 4, поворачивающий сошку 5. Нижний конец сошки перемещается вперед или назад, поворачивая через тягу 6 рулевой рычаг 7 с поворотным кулаком, соединенным шарнирно с осью 10. Через рулевые рычаги 8 и поперечную тягу 9 на соответствующий угол поворачивается и другой кулак 11 с установленным на его цапфе колесом.
Рулевую нерасчлененную трапецию такого устройства применяют на грузовых автомобилях, у которых управляемые колеса установлены на общей оси, подвешенной на рессорах к раме.
При независимой подвеске колес у легковых автомобилей рулевую трапецию делают расчлененной с несколько измененным расположением тяг и рычагов. Расчлененная рулевая трапеция с передним (рис. 2, в) или задним (рис. 2, г) расположением обычно включает рулевую сошку 8, конец которой перемещается в поперечном направлении, и маятниковый рычаг 10, соединенные средней поперечной тягой 9. . •
Маятниковый рычаг 10 установлен шарнирно на оси в кронштейне, закрепленном на раме основания кузова. Концы сошки 8 и маятникового рычага 10 или средней тяги соединены шарнирно двумя промежуточными боковыми тягами 11 с рычагами 12 поворотных кулаков 13 или поворотных стоек колес. Такая схема с расчлененной рулевой трапецией обеспечивает правильный поворот управляемых колес при качании их на независимой подвеске.

Рис. 1. Схема поворота автомобиля

Рис. 2. Схемы рулевых трапеций
У легковых автомобилей получает применение энергопоглощающее рулевое управление, повышающее безопасность водителя при аварии автомобиля. Такое рулевое управление имеет составной телескопический рулевой вал и колонку с фрикционными элементами или включает другие упругие элементы. В случае удара автомобиля о препятствие и смятия его передней части энергия удара поглощается в фрикционных или упругих элементах рулевого управления, а удар и перемещения не передаются на верхнюю часть его вала с рулевым колесом, предохраняя водителя от травм.
РУЛЕВОЙ МЕХАНИЗМ
Рулевой механизм 4 (см. рис. 3) служит для передачи усилий от рулевого колеса 1 с валом 3 на сошку 5. Рулевой механизм имеет передаточное число, доходящее обычно до 15— 20, вследствие чего усилие, развиваемое на сошке, получается значительно больше, чем усилие, приложенное к рулевому колесу, что облегчает поворот рулевого колеса и управление автомобилем.
Наибольшее применение получил рулевой механизм, выполненный в виде пары — глобоидальный червяк и ролик на подшипниках качения.
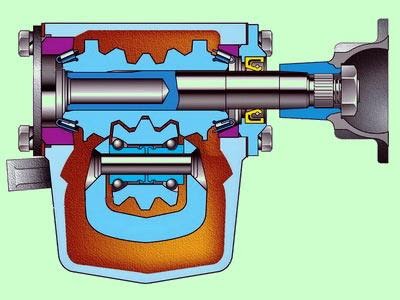
Такой рулевой механизм состоит из стального глобоидального (т. е. с вогнутой поверхностью) червяка 2 (рис. 4), в зацепление с которым входит двух- или трехгребневой ролик 5.
Червяк 2 закреплен на рулевом валу 1 и установлен на подшипниках 11 в картере 10 рулевого механизма. Ролик n5 установлен на шариковом 9 или игольчатом 4 подшипнике на оси 3, закрепленной в головке вала 6. Бал лежит на подшипниках в приливе картера. На наружном конце вала закреплена сошка 7.
При повороте червяка ролик перемещается по его винтовой нарезке, поворачивая вал с сошкой. При вогнутой поверхности червяка получается правильное зацепление червяка с роликом при различных его положениях. В такой паре трение и износ значительно уменьшаются, так как при работе ролик не скользит, а катится по червяку.
Вогнутая поверхность червяка и дуга, по которой поворачивается ролик, описаны разными радиусами R1 и R2 из разных центров так, что дуги сближаются в средней плоскости и расходятся по краям. Вследствие этого обеспечиваются малый зазор между роликом и червяком в' среднем положении и увеличенные зазоры в крайних положениях ролика. Это повышает чувствительность рулевого управления при среднем положении колес, облегчает вывод рулевого колеса из крайних положений и способствует более равномерному износу червяка.
Рулевой механизм расположен в картере 10, который крепится на раме и заполнен маслом.
Система рулевого управления (CРУ) — это комплекс механизмов, которые позволяют водителю поворачивать колёса в нужную сторону и управлять направлением движения авто. Вместе с тормозной системой образуют систему управления автомобилем. Конструктивные особенности, состояние СРУ напрямую влияют на управляемость транспортного средства.
Устройство рулевого управления
CРУ базируется на следующих элементах:
- Руль (рулевое колесо) — устройство в форме круга, позволяющее задать транспортному средству направление движения автомобиля. Также в руль транспортных средств встраивают передние подушки безопасности, мультимедийные устройства, аудиорегуляторы, регуляторы круиз-контроля, рециркуляции воздуха. Рули на авто устанавливаются с 1984 года (в первых авто вместо них были рычаги). Руль через ступицу присоединен к колонке. Работа руля может осуществляться разными способами — механически (с помощью рейки, от пары “винт-гайка” — на этих аспектах мы ещё остановимся при рассмотрении типов СРУ), гидравлически (на моделях с гидроусилителями), посредством электроники.
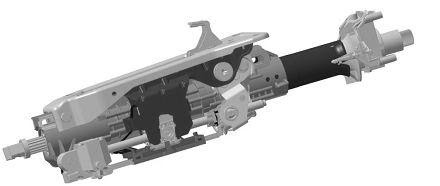
- Рулевая колонка – механизм в виде вала, предназначенный, в первую очередь для передачи крутящего момента от руля на рулевой механизм. Также среди функций колонки — предотвращение риска угона транспортного средства. На колонке же крепятся замок зажигания, указатели поворота, механизмы управления светотехникой и стеклоочистителем, подрулевой переключатель указателей поворота, демпфер для ударов при езде по неровному дорожному полотну.
- Рулевой механизм (редуктор). Выполняет сразу несколько важных задач: увеличивает усилие, которое водитель прилагает к рулю и возвращает его при снятии нагрузки в нейтральное положение, передает усилие к приводу.
- Рулевой привод. Нужен для того, чтобы передать усилие от рулевого механизма к поворотным кулакам колес. Компоненты узла, рулевые тяги, рычаги и наконечники. Тяга выполняет роль связующей между рулем, колонкой, колёсами. Благодаря ей воздействие на руль превращается непосредственно в повороты колёс. Наконечник тяги (подшипник + шаровой палец + пыльник) ответственен за правильный угол поворота ведущих колес, маневренность транспортного средства.
- Датчик крутящего момента. Позволяет высокоточно и объективно измерить крутящий момент.
- Усилитель. Позволяет снизить мышечное усилие водителя, прикладываемое к колесу. Относится к факультативным устройствам рулевого управления легкового автомобиля. А вот в тракторах, грузовиках – обязательный компонент.
На рисунке вы также видите карданный вал. Схема рулевого управления не может быть рассмотрена в его “отрыве”. Но важно понимать что это уже элемент трансмиссии.
Модернизация СРУ
СРУ постоянно совершенствуется. Особенно продуктивно идёт работа над совершенствованием колонок, усилителей. Очень активно совершенствованием рулевых колонок занимается, например, компания Bosch. Постоянно идёт работа над улучшением эргономических показателей, функций устройства.
В частности, производитель смог обеспечить водителю возможность плавно регулировать положение рулевого колеса по наклону и высоте. Среди существенных достоинств современных колонок компании — и нулевой люфт, а также специальный механизм управления деформацией при аварии (это существенно увеличивает ремонтопригодность колонки, восстановить узел можно без серьёзных затрат и потерь времени).

Огромное внимание уделяется электрически регулируемым решениям, ориентированным на серьёзные нагрузки (особенно актуально для коммерческого транспорта). При этом у устройств постоянно появляются доп. функции. Начиная от автокалибровки до памяти положения колонки.
;
Виды рулевого управления
Самая распространенная классификация – по типам редуктора, установленного на авто:



В зависимости от решаемых задач рулевое управление легкового автомобиля, грузовика может быть:
- Активным (AFS или Active Front Steering) и динамическим. Решение позволяет учитывать текущую скорость, угол поворота на скользкой дороге и корректировать в зависимости от них величину передаточного отношения. У AFS корректировка осуществляется с помощью планетарного редуктора, у динамической СРУ – посредством волновой передачи. Динамическое РУ легко встретить на Audi, активное РУ – на BMW.
- Адаптивным (DAS или Direct Adaptive Steering). Решение позволяет легко маневрировать на низких скоростях (очень ценно, когда водитель паркуется), а на более высоких скоростях – ехать мягко, не ощущая жесткую связь между рулем автомобиля и его колесами. СРУ фактически подстраивается под индивидуальные запросы и условия движения. Достигнуть результата помогают датчики усилия на колеса и датчик угла поворота рулевого колеса. Система активно ставится на Infiniti.
- Servotwin. Интегрированное электрогидравлическое решение. Направлено на целенаправленное управление задней осью. Ориентировано на улучшение маневрирования тяжёлого транспорта (грузовиков, автобусов с широкой колесной базой). Крутящий момент СРУ подстраивается к скорости движения транспортного средства, при внезапных порывах ветра корректируется положение руля. Разработчиком решения является компания Bosch. При этом оно адаптивно для транспортных средств разных производителей. В том числе, можно модернизировать ранее выпущенные автобусы, грузовики. Servotwin располагает ассистентом движения в выбранной полосе. Этот помощник уберегает от риска отклонения от своей полосы движения, а при медленном трафике с такой системой РУ легко поддержать безопасное расстояние до впереди идущего транспортного средства.
Виды усилителей руля
СРУ может оснащаться гидравлическими, электрическими усилителями:
- Гидравлические. Состоят из редуктора, силового гидроцилиндра и золотника. Проверенные десятилетиями конструкции. Обеспечивают оперативный отклик. При этом требуют внимания при обслуживании: важно постоянно держать под контролем уровень рабочей жидкости.
- Электрические. Наиболее прогрессивный вариант и наиболее точная регулировка настроек. Отсутствует необходимость контролировать жидкость, как в случае использования гидравлических конструкций. Особенно на практике хорошо себя зарекомендовали электроусилители с сервоприводом. Такие решения позволяют не просто снизить мышечное усилие, но и снизить потребляемое топливо. Наиболее подходящий вариант для внедорожников, небольших грузовиков.
- Электрогидравлические усилители. Это комбинированные системы. Задействована гидравлика, но приводятся действием, а не ДВС. Подходящий вариант для коммерческого транспорта, включая крупногабаритный транспорт.
Левый или правый руль?
В странах с правосторонним движением (таких большинство) руль монтируется слева, с левосторонним (Великобритания, Кипр, Мальта, Ирландия, Япония, Сингапур, Япония, Индия, Шри-Ланка, Индонезия, Таиланд, Малайзия, Мальдивы, Восточный Тимор, Бангладеш, Бруней, Макао, Пакистан и некоторых других) — справа.
При этом есть отдельная категория автовладельцев, которые, несмотря на то, что живут в странах с правосторонним движением, предпочитают только машины с правым рулем (и наоборот).
Плюсы правого руля (при езде в странах с правосторонним движением) и левого руля (при езде с левосторонним движением) такие:
- Комфортнее сделать поворот в плотном потоке.
- Лучше виден бордюр, когда водитель паркуется.
- Специфическая особенность рулевого управления легкового автомобиля в этом случае обеспечивает идеальные условия для выхода водителя на тротуар.
Существенная “загвоздка” — и фары. Если вы покупаете машину с правым рулем для страны с правосторонним движением, то фары нужно обязательно заменять, отрегулировать. Иначе то, что вы будете при ночной езде “слепить” других водителей — это неоспоримый факт. В принципе, и ТО в большинстве стран в этом случае вы не пройдете.
Также переставлять придётся и дворники. Они изначально производителями “заточены” на левое и правое направление, исключение только отдельные транспортные средства со симметричными “дворниками” (например, некоторые модели Mercedes-Benz).
Регулировка
Для того, чтобы повысить безопасность при движении, снизить нагрузку на руки и спину водителя механизмы рулевого управления автомобиля требуют регулировки. Регулировка может быть механической и электронной.
Чаще всего регулируется наклон рулевого колеса. Регулировка позволяет обеспечить водителю наиболее эргономичное и комфортное положение.
Самый популярный вариант — механический регулирующий механизм регулирования угла наклона рулевого колеса с нижним расположением шарнира. Он состоит из стопоров, кронштейна и блокировочного болта.

Стопоры поворачиваются. При положении рычага в заблокированном положении, выступы стопоров оказываются друг напротив друга, возникает осевое усилие, кронштейн колонки фиксируется. При положении рычага в разблокированном положении, выступы одного из стопоров оказываются в положении ровно напротив впадин другого стопора.
Очень популярен и механический механизм регулировки высоты руля. Регулировка осуществляется за счёт совместной работы скользящего вала, блокировочного болта, стопорных клиньев.

Стопорные клинья во время поворота рычага меняют положение. При блокировке рычага стопорные клинья фиксируют скользящий вал в нужном положении. При разблокировке рычага, возникает свободное пространство между скользящим валом и стопорными клиньями, создаются идеальные условия для перемещения вала по оси.
Что же касается электрорегулировки, то самый выигрышный вариант — комбинированные решения для одновременной регулировки угла наклона и высоты посредством сервопривода.

Для водителя регулировка очень проста. Требуется просто нажимать клавиши “Вверх”, “Вниз”. Поэтому хоть решение и не самое дешёвое, очень востребованное.
Основные неисправности
- износ шарнира наконечника тяги,
- пробуксовка ремня привода насоса гидроусилителя,
- потеря герметичности РМ,
- разрушение подшипника вала,
- ослабление крепежа.
О неполадках свидетельствуют стуки, биение или увеличенный люфт руля, шум в усилителе, течь рабочей жидкости (с РСУ с гидравликой).
Самые распространённые меры, предпринимаемыми мастерами на СТО в случае обнаружения проблем с СРУ, — замена наконечника тяги (либо тяги полностью), пыльника, жидкости гидроусилителя. Также часто может требоваться ремонт насоса гидроусилителя, рейки, редуктора.
Специальная электронная обучающая программа, которая посвящена системе рулевого управления доступна на базе платформы ELECTUDE. Учебные модули ориентированы на базовый уровень подготовки и позволяют усвоить принципы работы системы, ознакомиться с трапецией рулевого управления, гидравлическими и электрическими усилителями, разобраться, чем отличаются системы прямого и непрямого управления.
Всем привет. В продолжение темы описания авиационных систем "для чайников" (тут и тут), я подготовил новый текст про шасси и колёсные тормоза самолётов.

Система колёс, на которые опирается самолёт при движении по земле, называется шасси. В современных авиалайнерах используется трёхстоечная система шасси с двумя основными стойками, расположенными под крылом позади центра тяжести и одной передней стойкой, расположенной в носу самолёта. Основные стойки шасси оснащаются тормозами, а передняя стойка делается поворотной, чтобы самолет мог маневрировать при движении по земле.
На больших самолетах типа Аirbus 380 или Boeing 747 в дополнение к основным стойкам делают вспомогательные, чтобы распределить значительный вес гигантского самолета. На всех стойках шасси установлены амортизаторы. Принцип действия и назначение которых похожи на автомобильные, но основная задача — смягчить перегрузки на посадке, чтобы нагрузки на узлы самолёта не превышали допустимых. .
1. Поворотная носовая стойка

Кроме распределения веса самолета, носовая стойка поворачивается влево-вправо, чтобы самолет мог маневрировать при движении на земле.
Поворотом носовой стойки можно управлять двумя способами:
- С помощью педалей управления рулём направления,
- С помощью специальной ручки управления разворотом носовой стойки.
Управление поворотом носовой стойки с помощью педалей осуществляется на разбеге при взлёте и пробеге при посадке, когда скорость самолета достаточно велика. Одновременно, с помощью этих же педалей, летчик управляет отклонением руля направления.

картинка кликабельная
Предел отклонения носовой стойки при управлении от педалей специально ограничен, как правило это 10 градусов. Поворачивать на рулёжные дорожки, когда надо отклонять носовую стойку на углы порядка 50-70 градусов, не получится. На малых скоростях для руления используется ручка управления носовой стойкой.

Эта ручка используется только при рулёжке и автоматически отключается при больших скоростях движения.

картинка кликабельная
2. Основные опоры шасси и Колёсные тормоза
Основные опоры шасси представляют собой тележку, на которую навешиваются колеса, оснащённые тормозами.

Тормоза на самолёте похожи на автомобильные, только существенно мощнее, что не удивительно, т.к. им приходится тормозить машину массой 30-600 тонн со скоростей порядка 250 км/ч до нуля на ограниченной по длине взлётно-посадочной полосе (ВПП).
Самолётные тормоза состоят из "бутерброда" тормозных дисков и колодок.

Колёсные тормоза могут быть задействованы двумя разными способами: "вручную" и автоматически.
"Вручную" пилот тормозит педалями. Может возникнуть вопрос, как пилот умудряется педалями и носовой стойкой управлять и тормозить? Дело в том, что педали самолёта устроены совсем не так, как в автомобиле. Управление по направлению выполняется перемещением педалей вперёд-назад. При этом две педали двигаются синхронно: левая вперёд-правая назад и наоборот. Управление тормозами осуществляется нажатием на педаль. Каждую педаль можно нажимать отдельно, так называемое дифференциальное торможение — это ещё один из способов управления направлением движения по земле. Если левым тормозом пользоваться интенсивнее, чем правым, то и самолёт будет разворачивать влево и наоборот.

Автоматический режим торможения включается сам при наступлении определенного события. Таких событий может быть два:
- Во время посадки: Одновременное касание полосы (срабатывание датчиков обжатия шасси) и нахождение ручек управления двигателями в положении "малый газ",
- Во время взлёта: Перевод ручек управления двигателем из положения "взлётный режим" в положение "малый газ". Этот режим торможения называется "прерванный взлёт" (Rejected Takeoff, RTO)
Активировать/деактивировать режим автоторможения в самолётах Airbus и SSJ-100 лётчик может с помощью одной из четырёх кнопок под ручкой уборки-выпуска шасси (В Boeing для этого используется переключатель). Три кнопки (LOW, MED, MAX) соответствуют различным интенсивностям торможения при посадке, а четвертая (RTO) активирует режим прерванного взлёта.

С автоторможением при посадке всё очевидно. Давайте рассмотрим режим прерванного взлёта.
Прерванный взлёт — это режим, когда экипаж решает прекратить взлёт по причине существенного отказа. Прервать взлёт можно только до достижения "скорости принятия решения". Скорость принятия решения зависит от длины и состояния поверхности ВПП и рассчитывается исходя из возможности затормозить, не выкатившись за пределы ВПП. Если в процессе набора скорости неисправность происходит после достижения скорости принятия решения, экипаж продолжит взлёт, что бы не случилось. Если до — будет тормозить.
Перед каждым взлётом экипаж обязан активировать автоторможение. Скорость начала и интенсивность торможения при прерванном взлёте напрямую влияет на то, выкатится ли самолёт за пределы полосы или нет. Активированное автоторможение гарантирует, что торможение начнётся немедленно после вывода двигателей из взлётного режима.
Если прерывать взлёт приходится при максимальной взлётной массе и на предельной скорости, то несмотря на то, что кроме колёсных тормозов экипаж задействует реверс и воздушные тормоза, энергия, которую должны поглотить тормоза, разогревает их так, что они начинают светиться не хуже лампочки. После полной остановки самолёта работа тормозов не заканчивается. Они должны выдержать ещё не менее 90 секунд, прежде чем подожгут стойки шасси. По нормативам, что за 90 секунд к самолёту подоспеет пожарная команда, которая всегда дежурит в аэропортах (и успевает!).

Спасибо комментариям — напомнили об одной очень важной функции тормозов авиалайнера: антиблокировочной системе (АБС). Основное отличие АБС самолёта от таковой автомобиля заключается в последствиях блокировки колёс: если у автомобиля блокировка приводит к снижению управляемости и увеличению тормозного пути, то заблокированные колёса самолёта при посадке просто взрываются от трения об асфальт. А без покрышек основных стоек торможение не будет ни эффективным ни безопасным. Так что АБС на самолёте неотключаемая и довольно критическая функция.
3. Уборка — выпуск шасси
Кроме тормозов и управления носовой стойкой с шасси связана ещё одна важная функция — уборка/выпуск шасси. Управление уборкой-выпуском шасси в нормальном режиме осуществляется с помощью соответствующей ручки на приборной панели.

Вверх — убрать, вниз — выпустить. Кстати, можно не бояться случайно "сложить" стойки шасси, когда самолёт стоит на земле — в современных авиалайнерах предусмотрена блокировка от таких действий, когда шасси "обжаты" — амортизаторы находятся в сжатом состоянии под действием веса ЛА .
Для улучшения аэродинамических свойств ЛА ниши, в которых размещаются убранные шасси, закрываются створками, поэтому процедура нормальной уборки шасси выглядит примерно так:
- Вычислитель снимает замки закрытого положения створок и подаёт команду на открытие створки
- Створки полностью открыты и зафиксированы в открытом положении. Соответствующие датчики сообщают об этом вычислителю
- Вычислитель открывает замки выпущенного положения стоек шасси и начинает их уборку.
- Стойки полностью убраны и зафиксированы в закрытом положении. Соответствующие датчики сообщают об этом вычислителю
- Вычислитель открывает замки открытого положения створок и начинает их закрывать
- Створки полностью закрыты и зафиксированы в закрытом положении. Вычислитель фиксирует признак окончания уборки шасси

Весь процесс занимает 20-40 секунд. Если в процессе что-то идёт не так, то система прерывает процесс, т.к. есть вероятность что-то сломать. Нормальный выпуск шасси происходит в обратном порядке.
На случай неисправностей в системе уборки-выпуска предусмотрен особый порядок выпуска шасси — аварийный выпуск. Аварийный выпуск активируется кнопкой аварийного выпуска, расположенной под колпачком рядом с ручкой уборки-выпуска шасси. При аварийном выпуске средствами, не зависящими от вычислителя системы уборки-выпуска шасси, снимаются замки убранного положения стоек шасси и створок. Шасси вываливается под собственным весом. Массы каждой из стоек достаточно чтобы выломать створку, даже если та не откроется сама. На замки нижнего положения стойки также встают под действием собственного веса.
4. Датчики обжатия стоек шасси
Информация об обжатии стоек шасси, которые я упоминал выше, это очень нужная многим системам информация. Пожалуй, стоит перечислить кое-какие функции, зависящие от этого сигнала:
При появлении сигнала обжатия шасси:
При снятии сигнала обжатия шасси:
Параграф добавлен после прочтения комментариев: Датчики обжатия стоек шасси как правило выполняются многоканальными и располагаются на каждой из стоек. Данные с многочисленных датчиков собираются специальными устройствами, концентраторами данных. На основании полученных данных формируются сигналы об обжатии каждой из стоек и сигнал обжатия всех стоек. В логике работы описанных выше функций используются разные сигналы: для начала автоторможения достаточно сигналов обжатия двух основных стоек, а для включения режима тех. обслуживания надо чтобы были обжаты все три стойки. Но это уже другая история.
Бонус
Пока я готовил этот текст, решил для себя разобраться, почему на некоторых самолётах, например Boeing 757 тележка основных стоек шасси в полете наклонена так, что передние колёса находятся выше задних:

А на Boeing 767 наоборот, передние колеса ниже задних:

Как выяснилось всё дело в том, как спроектирована ниша, куда убираются стойки шасси, спасибо видео:
И, что самое любопытное, в военно-транспортном C5 Galaxy основные стойки шасси выпускаются в положении поперёк движения самолёта и только потом разворачиваются на 90 градусов в нужное положение.
Читайте также: