
Реферат на тему рекуперативное торможение
Обновлено: 02.07.2024
Применение рекуперации. Одним из самых сложных вопросов, возникающих перед машинистом как в момент перехода на рекуперацию, так и во время ее применения,— это имеются ли другие электровозы или электропоезда на участке, работающие в режиме тяги. Ведь тяговые двигатели образуют тормозной момент лишь тогда, когда есть потребители рекуперируемой энергии. Если потребителя нет, то тока в цепи не будет и тормозной момент у двигателя не возникнет.
На некоторых участках тяговые подстанции не имеют специальных устройств для преобразования или гашения избыточной энергии, возвращаемой в сеть рекуперирующими электровозами, и если на данном участке нет электровозов, потребляющих энергию, то применять электрическое торможение трудно.
Высокое напряжение в сети часто указывает, что на участке нет потребителей (других электровозов или электропоездов) или они берут малую нагрузку, однако этот признак не всегда точен. Поэтому не рекомендуется собирать цепи рекуперации при напряжении в сети выше 3800 В, в противном случае режим рекуперации можно создать лишь завышая напряжение на тяговых двигателях сверх допустимых значений.
На ряде участков с большой неравномерностью движения поездов во избежание возникновения перенапряжений на коллекторах двигателей машинисты применяют рекуперативное торможение при последовательно-параллельном соединении якорей и высоких скоростях движения (до 80 км/ч). Это снижает экономичность торможения, несколько повышается нагрев якорей двигателей, но в значительной мере исключает возможность появления круговых огней и перебросов дуги по изоляторам кронштейнов щеткодержателей.
Рекуперативное торможение нельзя применять в случае выключения хотя бы одного из тяговых двигателей или мотор-вентиляторов, а также при повреждении защитных аппаратов (быстродействующих контакторов, автоматических выключателей управления, вентилей электрического торможения).
Время работы с током возбуждения свыше 300А не должно превышать 40 мин во избежание превышения допустимой температуры нагрева обмотки якоря преобразователя.
Режимы рекуперации.
Схемы соединения якорей при электрическом торможении машинист выбирает в зависимости от скорости движения. При движении с малой скоростью (примерно 15—30 км/ч) ЭДС якорей невелика даже при значительном токе возбуждения, поэтому для получения достаточной суммарной ЭДС якоря соединяют последовательно. При средних скоростях движения (25—60км/ч) применяют последовательно-параллельное соединение якорей, а при скоростях выше 55 км/ч на BЛ10— параллельное. При последовательном соединении напряжение на якорях невысокое (до 500В) и по коммутации тока якорей двигателей ограничений нет даже при неблагоприятном соотношении токов якоря и возбуждения. Это соотношение наступает при верхнем диапазоне скорости (т. е. 25—30 км/ч), поскольку при небольшом токе возбуждения ЭДС и ток якорей достаточно велики за счет высокой частоты их вращения.
При движении со средними скоростями соединяют последовательно по четыре якоря в каждой цепи, ЭДС каждого из них в зависимости от скорости движения и тока возбуждения (т. е. от положения тормозной рукоятки контроллера) может находиться в пределах 800—1000В. В этом случае нежелательное соотношение токов якоря может быть достигнуто при движении в диапазоне высших скоростей, т. е. 45—55км/ч. На параллельном соединении соотношение токов якоря и возбуждения не должно превышать значения, равного 3; оно возникает при скоростях выше 65 км/ч, а при низком напряжении в контактной сети до начала рекуперации может быть и при меньших скоростях.
Если большие тормозные усилия не требуются, то на СП соединении можно достигать скорости до 80км/ч.
Примененная на электровозах схема с противовозбуждением генераторов преобразователей обеспечивает практически неизменным ток рекуперации при мгновенных колебаниях напряжения сети Эта стабилизация обеспечивается за счет почти одновременного автоматического колебания ЭДС якорей при колебаниях напряжения сети, чем поддерживается постоянство силы торможения электровоза. Только в том случае, когда происходит резкое уменьшение числа потребителей энергии (срабатывание БВ на соседнем электровозе, моторном вагоне), это может привести к завышению т. е. перенапряжению на двигателях. Следовательно, при наличии на участке небольшого числа потребителей рекуперацию при параллельном соединении и высоком напряжении следует применять осторожно.

Двигатель постоянного тока, стоящий в моноколесе, может работать как генератор, заряжая батареи на торможении. Однако возможность еще не означает, что рекуперация непременно есть. Из того, что у людей заряжались колеса при, например, спуске с горы, можно сделать вывод, что рекуперация в моноколесах все-таки используется, но ее точный вклад в торможение оставался неизвестным. Но недавно пользователи форума Электротранспорт.ру сделали полноценный ваттметр с логгером и посмотрели, что происходит с током и напряжением при езде. По результатам измерений рекуперация есть точно, но куда-то пропал еще один тип торможения.
Немного физики
Электродвигатели постоянного тока, которые стоят на моноколесах, имеют три варианта торможения.
Рекуперативное торможение. В этом случае двигатель превращается в генератор и переводит кинетическую энергию в электрический ток, который уходит в сеть (электровозы и метро) или в аккумуляторы (электрокары). Рекуперативное торможение возможно, когда скорость вращения превышает скорость идеального холостого хода.
Реостатное торможение. Здесь двигатель также работает, как генератор, но получаемая энергия уходит в нагрев тормозных резисторов. Довольно распространено на железной дороге.

Тормозные резисторы
Реверсивное торможение, оно же торможение противотоком или противовключением. В этом случае двигатель не превращается в генератор, но начинает тянуть в противоположную движению сторону. Например, если электромотор тянет вверх груз, и на этот груз запрыгивает хулиган, перевешивая возможности мотора, то груз начнет опускаться, а двигатель окажется в режиме реверсивного торможения. В таком режиме протекающий через обмотки ток гораздо выше, чем при нормальной работе, и это может создать определенные проблемы.
Специфика моноколеса
У многих моноколес нет передней и задней части, и контроллер не разгоняется и не тормозит, а все время решает задачу обратного маятника, пытаясь подъехать под ездока, который может пользоваться этим для эффектных трюков.

Например, здесь райдер очень резко тормозит и начинает разгоняться вправо.
Также, известно, что в конструкции моноколеса нет тормозных резисторов, и реостатное торможение в принципе невозможно. Теоретически, логично предположить, что в процессе торможения сначала на высокой скорости будет задействоваться рекуперативное торможение, которое на каком-то этапе перейдет в торможение противовключением, которое, если мы не прекратим давить на педаль в ту же сторону, перейдет уже в двигательный режим, и мы поедем в противоположную сторону. Но реальные измерения оказались очень любопытными.
Исследования на железе

В собранном виде на колесе другого пользователя Ripido

Ваттметр учитывал направление тока, там, где батареи заряжались, ток и мощность уходили в минус.
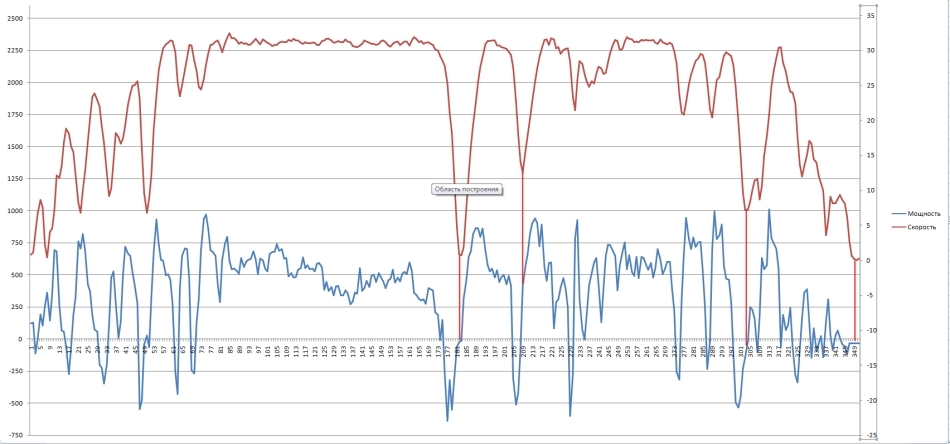
График в полном размере
Если посмотреть на красные линии, то получается, что в глубоком устоявшемся торможении не видны следы торможения противотоком — пока скорость падает, ток идет в батареи.
Интересно, что показатели встроенного логгера, если не учитывать ток по модулю, отличаются от данных ваттметра только на участках довольно резких маневров.
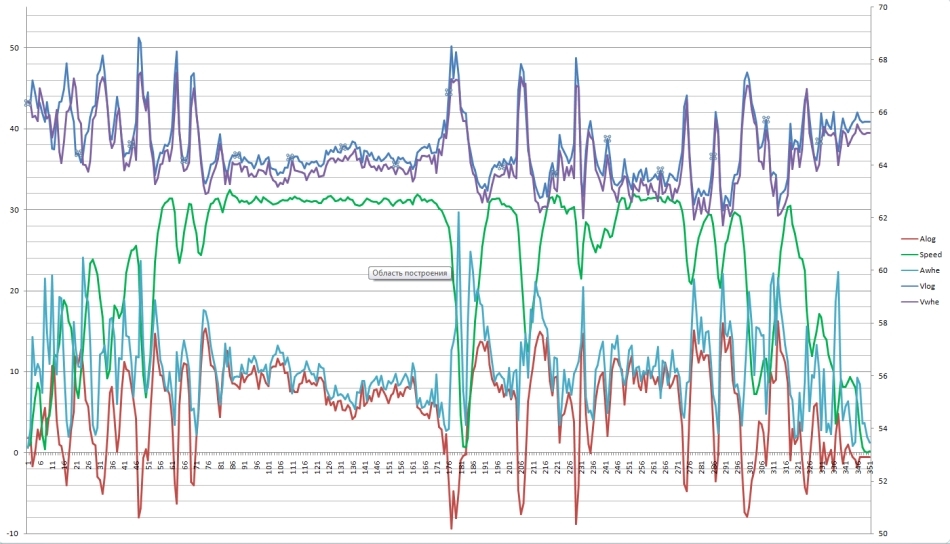
График в полном размере, Awhe, Vwhe — встроенный логгер колеса, Alog, Vlog — логи ваттметра
Гипотезы и возможные эксперименты
- Торможение противотоком пропало из-за усреднения или рассинхронизации данных, графики не отражают реального положения вещей.
- Очень низкое значение скорости идеального холостого хода позволяет тормозить почти до нуля, и переход на торможение противотоком мы не замечаем
Также, попробуем провести следующий мысленный эксперимент. Ситуация первая — мы катимся с горки со скоростью 20 км/ч. В этом случае, очевидно, работает рекуперация. Ситуация вторая — мы стоим на горке (моноколесо стоять не может, так что мы легко касаемся пальцами столба и за счет этого не заваливаемся набок). В этом случае мы, очевидно, работаем в тяговом режиме, потому что надо прикладывать усилие, чтобы не покатиться вниз. Ситуация третья — мы спускаемся со скоростью 1 миллиметр в секунду с крутой горки, придерживаясь за столб. В этом случае колесо, очевидно, работает в режиме противовключения, потому что итоговый баланс энергии отрицательный — она расходуется на то, чтобы не скатиться под горку быстрее, чем мы движемся. И где-то между ситуациями 1 и 3 у нас будет переходный момент, когда итоговый энергетический баланс будет околонулевым — скатываться быстрее будет выгодно энергетически, а движение медленнее будет требовать энергетических затрат.
Практическое применение
У всех этих рассуждений есть очень простые следствия:
Есть забавная история о том, как на трассе заряжали электромобиль Tesla — его взяли на буксир, и водитель Tesla давил на педаль тормоза, чтобы рекуперация заряжала батареи. С моноколесами то же самое — если у вас почти сел аккумулятор, пусть вас возьмет на буксир соратник на велосипеде, самокате, роликах или моноколесе (пожалуйста, берегите себя и не пробуйте цепляться за машины или общественный транспорт!).
Заключение
В публикации использованы фотографии пользователей Ripido и Drift3r, темы, где обсуждалась рекуперация тут и тут. Также использованы стоп-кадры из рекламного ролика с участием недавнего победителя конкурса моноколесных талантов Дамьена Гоме. Дамьен — профессиональный акробат, поэтому ролик, на мой взгляд, красив сам по себе и наглядно показывает возможности любого хорошего моноколеса.
1.Расчётная схема электрических цепей; краткое пояснение принципа стабилизации тормозного тока.
2.Функциональная схема системы стабилизации тормозного тока ; краткое пояснение функционального назначения элементов.
3.Расчёт статических характеристик и динамических параметров элементов системы стабилизации тормозного тока.
4.Статические характеристики замкнутой системы стабилизации тормозного тока .
5.Структурная схема системы ; краткое пояснение физической сущности передаточных функций структурной схемы .
6.Логарифмические частотные характеристики разомкнутой системы. Приближенная оценка качества регулирования .
7. Расчет переходного процесса выходной переменной – тока рекуперации при ступенчатом изменении напряжения контактной сети .Оценка качества регулирования.
1. Тип ЭПС: грузовой электровоз постоянного тока ВЛ – 10
2. Тип тяговых электродвигателей: ТЛ2К1
3. Количество тяговых электродвигателей ая = 4 , mя = 2
4. Группировка тяговых электродвигателей: П
5. Режим работы ЭПС: рекуперативное торможение
6. Скорости расчётных режимов: V1 = 80 км/ч , V2 = 60 км/ч
7. Ток тяговых электродвигателей в расчётном режиме: 350 А
8. Напряжение контактной сети: 3300 В
9. Параметры потребителя: rкс = 0,15 Ом , Lкс = 15 мГн
Цель проектирования - приобретение практических навыков расчёта систем автоматического регулирования (САР) на примере системы стабилизации тока электрического рекуперативного торможения электровозов ВЛ10.
Основные задачи проектирования.
1.Разработка принципиальной расчётной схемы электрических цепей и функциональной схемы САР.
2.Расчёт статических, динамических, частотных характеристик основных элементов и системы автоматического регулирования.
3.Оценка устойчивости САР и качества процесса регулирования.
1. Принципиальная и функциональная схемы системы
стабилизации тормозного тока.
1.1.Принципиальная расчётная схема электрических цепей.
Регулирование величины тока рекуперации производится изменением сопротивления rтР регулировочного резистора в цепи обмотки независимого возбуждения (ОНВ) генератора возбуждения (В) посредством тормозной рукоятки контроллера машиниста. Стабилизация тока рекуперации осуществляется обмотками противовозбуждения (ОПВ) генератора В.
Потребитель рекуперируемой электрической энергии электровоз или электропоезд попутного или встречного движения представлен в виде источника ЭДС (напряжения Uкс) с внутренним сопротивлением rкс и индуктивностью Lкс.
На схеме обозначены переменные величины: токи якорей iя, токи возбуждения iв, магнитные потоки Ф тяговых электродвигателей, ток возбуждения iн, магнитный поток Фв генератора возбуждения.
На схеме обозначены также все расчётные параметры элементов системы: сопротивление rя, индуктивность Lя обмоток якорей Я1…Я4, сопротивление rв и число витков w полюсных катушек обмоток возбуждения ОВ1…ОВ4 тяговых электродвигателей, сопротивление обмоток якоря rяв, сопротивление rн, число витков wн обмотки возбуждения ОНВ генератора В. Суммарное число витков обмоток противовозбуждения ОПВ генератора В wпв=2 (см. рис.1).
1.2.Функциональная схема системы стабилизации тормозного тока.
__________________
Если не можете скачать файл. / Наше приложение ВКонтакте / Какими программами открывать скачанное? | Распоряжения 1
В частотно-регулируемых электроприводах можно реализовать все три основные способы торможения: рекуперативное, динамическое и противовключением. В силу известных недостатков: большие токи и трехкратные потери энергии по сравнению с динамическим торможением торможение противовключением не применяются в частотно-регулируемых электроприводов является рекуперативное торможение, т.е. частотное торможение с возвратом энергии в питающую сеть и так называемое резистивное (другое название – инверторное) торможение, т.е. частотное торможение с рассеиванием энергии торможения в двигателе, инверторе и дополнительном тормозном резисторе. При малых скоростях применяется также динамическое торможение, когда постоянный ток от преобразователя частоты подается в обмотки статора АД.
По технико-экономическим соображением желательно использовать рекуперативное торможение. Без дополнительных технических средств рекуперативное торможение можно применять только в двух функциональных схемах ПЧ-АД:
1) Циклоконвертор – асинхронный двигатель (система Ц-АД)
2) Управляемый выпрямитель – автономный инвертор тока – асинхронный двигатель (система УВ-АИТ-АД) – рис. 8.39.
Перевод АД из двигательного режима в режим рекуперативного торможения осуществляется с помощью системы управление СУ преобразователем. В циклоконверторе Ц с помощью СУ обеспечивается обмен активной и реактивной энергией между двигателем и сетью. В системе УВ-АИТ-АД направление тока Ia в звене постоянного тока не изменяется, а изменяется только полярность выходного напряжения УВ путем перевода выпрямителя в режим ведомого сетью инвертора (ВИ). Благодаря этому создаются условия рекуперации энергии торможения в питающую сеть. Однако в настоящее время частотно-регулируемые электроприводы по системе Ц-АД и УВ-АИТ-АД применяются в основном в мегаваттном диапазоне мощностей. Основной структурой современных частотно-регулируемых электроприводов является структура: неуправляемый выпрямитель – фильтр – автономный инвертор напряжения с ШИМ – асинхронный двигатель (система НВ-АИН-АД) – рис. 8.40. По такой структуре создаются регулируемые электроприводы в диапазоне мощностей 1÷500 кВт.
В функциональной схеме рис. 8.40 из-за неуправляемого выпрямителя невозможно изменить полярность напряжения в звене постоянного тока. Поэтому в следствии неизменного направления тока и неизменной полярности напряжения невозможна рекуперация энергии торможения в сеть без дополнительных устройств. Для рекуперации энергии встречно-параллельно НВ подключается инвертор ВИ ведомый сетью (рис. 8.41). При торможении активная мощность передается в звено постоянного тока, а затем с помощью ВИ инвертируется в сеть переменного тока. В процессе рекуперации активной энергии ВИ потребляет реактивную энергию, которая зависит от угла управления тиристорами ВИ, что снижает коэффициент мощности электропривода при торможении.
В многодвигательных электроприводах АИН-АД, например, в электроприводах центрифуг применяемых при производстве сахара, ведомый сетью инвертор ВИ ставится один на общее звено постоянного тока (рис. 8.42). Обычно торможение двигателей происходит в разное время, поэтому энергия торможения одного АД идет на выполнение работы другим двигателем. В результате общее потребление энергии ЭП уменьшается.
По такой же функциональной схеме строится асинхронный тяговый электропривод с частотным управлением. Отличие только в том, что сеть переменного тока однофазная.
Второй способ реализации рекуперативного торможения в системах АИН-АД состоит в применении управляемого выпрямителя с ШИМ, аналогично инвертору (рис. 8.43). В этой системе первый преобразователь, УВ-ШИМ, формирует синусоидальную кривую тока потребляемую управляемым выпрямителем, а второй – АИН-ШИМ формирует квазисинусоидальную кривую напряжения для питания АД. Эта система обеспечивает работу АД в четырех квадрантах параметров ω-М.
Рекуперативное торможение применяется в электроприводах работающих в высокодинамичных режимах (краны – 16%, лифты – 11%, подъемники – 11%, центрифуги – 11%). Реализация рекуперативного торможения АД требует дополнительных капитальных затрат, но при этом уменьшаются годовые эксплутационные расходы за счет возврата части энергии торможения в питающую сеть. Выбор того или иного варианта торможения определяется технико-экономическом расчетом. При оценке тормозных режимов учитывают различные способы торможения, применяемые в электроприводах:
1) механическое (свободный выбег, механический тормоз),
2) редкое электрическое, не влияющая на производительность механизма,
3) электрическое с небольшим тормозным моментом, когда энергия торможения рассеивается в двигателе и инверторе,
4) электрическое со значительным тормозным моментом, когда энергия торможения превышает потери энергии в АД и инверторе.
На основании литературных источников известно, что в общем случае рекуперативное торможение оказывается выгодным при мощности двигателя большей 30 кВт. При меньшей мощности используется резистивное (инверторное) торможение, где энергия торможения, превышающая потери энергии в двигателе и инверторе, рассеивается в тормозном сопротивлении, включаемом через коммутируемый транзистор на шины промежуточного звена постоянного тока (рис. 8.44).
При торможении кинетическая энергия, освобождаемая инерционными массами электропривода при снижении скорости, рассеивается в виде потерь в АД, АИН и тормозном сопротивлении Rт:
где J, ω – момент инерции электропривода и угловая скорость АД,
, – потери мощности в АД и АИН,
Iт – ток в тормозном сопротивлении Rт,
Мдин – динамический момент электропривода.
В выражении (8.277) не учтено изменение электрической энергии в конденсаторе С фильтра выпрямителя:
На основании (8.277) можно рассчитать величину Rт для конкретного электропривода.
С помощью управления тормозным транзистором VT поддерживается заданный уровень напряжения в звене постоянного тока.
Теперь остановимся на причинах по которым структура НВ-АИН-ШИМ-АД стала основной в современном частотно-регулируемом электроприводе. Коэффициент мощности kм входной цепи НВ-АИН определяется выражением
– действующие значения первой гармоники и всего входного тока неуправляемого выпрямителя НВ;
kI – коэффициент несинусоидальности кривой входного тока НВ.
Если не учитывать индуктивности на входе НВ и принять идеально сглаженный выпрямленный ток Id, то для трехфазной мостовой схемы выпрямления имеем следующие соотношения:
где Ud0, Ud.ном – максимальное и номинальное выпрямленное напряжение;
Id, Pd – ток и мощность цепи выпрямленного тока;
U2 – действующее значение фазного напряжения на входе выпрямителя НВ;
Sтр – полная мощность питающего выпрямитель трансформатора;
Iв,г – действующее значение всех высших гармоник входного тока выпрямителя.
Действующее значение входного тока выпрямителя
Этот ток можно сравнить с потребляемым АД синусоидальным током с коэффициентом мощности cosj=0,85:
где Iа – активный ток АД, который соответствует току первой гармоники I1(1), потребляемому трехфазным мостовым выпрямителем. Действующее значение первой гармоники входного тока выпрямителя будет на (3¸4)% больше, чем Iа. Но даже при этом учете видно, что потребляемый АД ток (при cosj=0,85) будет примерно на 8% больше потребляемого выпрямителем тока при той же активной мощности. Следовательно, система электропривода НВ-ШИМ-АИН-АД не требует увеличения сечения проводов по сравнению с прямым подключением к сети АД той же мощности. Связано это с тем, что отсутствие потребления реактивной мощности в неуправляемом выпрямителе перевешивает наличие токов высших гармоник
Читайте также: