
Реферат на тему регуляторы
Обновлено: 05.07.2024
Теория автоматического регулирования и управления относится к числу научных дисциплин, образующих в совокупности науку об управлении. В начале она создавалась с целью изучения закономерностей в процессах автоматического управления техническими процессами - производственными, энергетическими, транспортными и т.п. . В настоящее время основное значение тиория автоматического регулирования и управления имеет для изучения технических процессов, хотя в последние годы её выводами и результатами начинают пользоваться для изучения динамических свойств систем управления не только технического характера.
Автоматическое регулирование
Современные системы управления технологическими процессами характеризуются большим количеством и разнообразием технологических параметров, систем регулирования и объектов регулирования.
Основные определения
Параметр технологического процесса– физическая величина технологического процесса, например, температура, давление, расход, уровень, ббьем, масса, рН, напряжение и т.д.
Параметр технологического процесса, который необходимо поддерживать постоянным, или изменять по заданной программе, или изменять по определенному закону, называется – регулируемым параметром.
Значение регулируемой величины в рассматриваемый момент времени называется мгновенным значением.
Значение регулируемой величины, полученное в рассматриваемый момент времени на основании данных некоторого измерительного прибора называется ее измеренным значением.
Измеряемый и (или) регулируемый параметр технологического процесса может преобразовываться первичным прибором (датчиком) в какой-либо унифицированный сигнал. Если датчик выдает неунифицированный сигнал (например, термопары, термопреобразователи сопротивления, тензодатчики и др.), то для приведения его к стандартному диапазону должен быть установлен соответствующий нормализатор (преобразователь) сигналов. Также можно использовать измерители-регуляторы с универсальным входом, которые поддерживают подключение большинства наиболее распространенных типов первичных приборов (датчиков) без использования нормализаторов сигналов.
Объект управления (ОУ) или объект регулирования – устройство, требуемый режим работы которого должен поддерживаться извне специально организованными управляющими воздействиями.
Управление – формирование управляющих воздействий по определенному закону, обеспечивающих требуемый режим работы ОУ.
Автоматическое управление – управление, осуществляемое без непосредственного участия человека.
Задача регулирования – доведение выходной величины объекта регулирования до заранее определенного значения и удержания ее на данном значении с учетом влияния возмущающих воздействий.
Система автоматического регулирования (САР) – автоматическая система с замкнутой цепью воздействия, в котором управление Y вырабатывается в результате сравнения истинного значения (PV=X) с заданным значением SP. Основное назначение САР заключается в поддержании заданного постоянного значения регулируемого параметра или изменение его по определенному закону.
Выходное воздействие (Y) – воздействие, выдаваемое на выходе системы управления или устройства регулирования. В литературе по автоматизации также встречаются аббревиатуры, соответствующие данному определению:
Задающее воздействие – воздействие на систему, определяющее требуемый закон изменения регулируемой величины.
Возмущающее воздействие – воздействие, стремящееся нарушить функциональную связь между задающим воздействием и регулируемой величиной.
Главное назначение систем автоматической стабилизации – компенсация внешних возмущающих воздействий.
1) Виды возмущающих воздействий, действующие на систему стабилизации (систему управления), приведены в таблице.

2) Классификация видов возмущающих воздействий, действующих на систему управления или регулирования, приведена в следующей таблице.

Обратная связь — это процесс, приводящий к тому, что результат функционирования какой-либо системы влияет на параметры, от которых зависит функционирование этой системы. Другими словами, на вход системы подаётся сигнал, пропорциональный её выходному сигналу (или, в общем случае, являющийся функцией этого сигнала). Часто это делается преднамеренно, чтобы повлиять на динамику функционирования системы.
Различают положительную и отрицательную обратную связь. Отрицательная обратная связь изменяет входной сигнал таким образом, чтобы противодействовать изменению выходного сигнала. Это делает систему более устойчивой к случайному изменению параметров. Положительная обратная связь, наоборот, усиливает изменение выходного сигнала. Системы с сильной положительной обратной связью проявляют тенденцию к неустойчивости, в них могут возникать незатухающие колебания, т.е. система становится генератором.
Регулятор — в теории управления устройство, которое следит за работой объекта управления как системы и вырабатывает для неё управляющие сигналы. Регуляторы следят за изменением некоторых параметров объекта управления (непосредственно, либо с помощью наблюдателей) и реагируют на их изменение с помощью некоторых алгоритмов управления в соответствии с заданным качеством управления.
Статическое регулирование. При статическом регулировании регулируемая величина (например, температура), находящаяся под влиянием различных внешних воздействий (подача напряжения на ТЭН или подача охлаждающей жидкости) на регулируемый объект по окончании переходного процесса,
принимает неодинаковые значения, зависящие от величины воздействия.
Характерные особенности статической системы регулирования следующие:
1) равновесие системы возможно при различных значениях регулируемой величины;
2) каждому значению регулируемой величины соответствует определенное положение регулирующего органа.
Астатическое регулирование. При астатическом регулировании нет определенной связи между положением регулирующего органа и установившимся значением регулируемой величины. При астатическом регулировании при различных по величине значениях внешнего возмущающего воздействия (нагрузки) на объект по окончании переходного процесса восстанавливается значение регулируемой величины.
Характерные особенности астатической системы регулирования следующие:
1) равновесие системы возможно только при единственном значении регулируемой величины (например, уровня), причем это значение равно заданному;
2) регулирующий орган (например, клапан, заслонка) должен иметь возможность занимать различные положения при неизменном значении регулируемой величины.
У астатических регуляторов отсутствует статическая ошибка и регулируемая величина остается равной заданной с точностью, соответствующей нечувствительности регулятора для всех равновесных состояний системы.
Подавляющее большинство систем построено по принципу обратной связи – регулирования по рассогласованию или регулирования по отклонению.

а) регулирование по рассогласованию;

б) регулирование по отклонению;

в) принцип регулирования по возмущению;

г) комбинированный принцип регулирования по рассогласованию и возмущению.
Основные требования к промышленным САР:
1) Промышленная САР должна обеспечивать устойчивое управление процессом во всем диапазоне нагрузок на технологический обьект.
2) Система должна обеспечивать в окрестности рабочей точки заданное качество процессов управления (время переходного процесса, перерегулирование и колебательность).
3) Система должна обеспечивать в установившемся режиме заданную точность регулирования.
Желательно обеспечить нулевую статическую ошибку регулирования.
Все эти условия будут выполнятся, если обьект управления является стационарным, либо его вариации параметров достаточно малы и компенсируются запасами устойчивости системы. Современные промышленные регуляторы обеспечивают устойчивый процесс регулирования подавляющего большинства промышленных объектов при условии, что правильно выбраны настройки регулятора.
Регулятор Уатта
Многие ученые, инженеры и изобретатели разных стран мира внесли свой вклад в становление и развитие теории автоматического управления и создание устройств автоматического регулирования. Но к тем, кто стоял у истоков этой научно-технической дисциплины, в первую очередь следует отнести изобретателей Дж. Уатта, братьев Вернера и Вильгельма Сименсов и ученых Д.К. Максвелла, И.А. Вышнеградского и А. Стодола. Разработанный в 1784 г. великим английским изобретателем Дж. Уаттом центробежный регулятор явился первым устройством с обратной связью, позволившим автоматически регулировать подачу пара в машину и тем самым стабилизировать скорость вращения вала при изменяющейся нагрузке.


Устройство регулятора

Первым технически важным управляющим устройством был регулятор Уатта. Он был изобретен английским механиком Джеймсом Уаттом и предназначен для обеспечения постоянной угловой скорости вращения вала некоторой машины (классической паровой машины, паровой или гидравлической турбины, дизельной установки и т.д.).
Функциональная схема системы автоматического регулирования угловой скорости паровой машины представлена на рисунке 1. Рабочее вещество (пар, вода, дизельное топливо) поступает по трубопроводу, снабженному заслонкой. Это рабочее вещество, поступая в машину, создает вращающий момент для вала, на котором расположен регулятор Уатта. Например, в случае паровой турбины струя пара воздействует на турбинные лопатки, насаженные на вал, и создает тем самым силовой момент.
Регулятор Уатта представляет собой часть вала, на конце которого шарнирно закреплены два одинаковых стержня с одинаковыми грузами на концах. При отклонении угловой скорости ω маховика от заданного значения меняется центробежная сила грузов, в связи с чем меняется положение муфты, которая рычагом приводит в действие исполнительный механизм – заслонку. Таким образом в данной системе работа исполнительного механизма осуществляется за счет энергии чувствительного элемента (центробежного регулятора) и, следовательно, с точки зрения классификации систем автоматического регулирования данная САР является системой прямого действия.
Принцип работы
При увеличении угловой скорости вращения вала шары под действием центробежной силы расходятся и опускают муфту, которая с помощью рычага прикрывает заслонку, впускающую пар в цилиндр машины, в результате чего скорость вращения вала перестает возрастать. При уменьшении угловой скорости вращения вала происходит противоположный процесс: центробежная сила снижается, шары сближаются, муфта поднимается, заслонка приоткрывается, количество пара, поступающего в цилиндр, увеличивается и скорость вала машины перестает уменьшаться. Таким образом, в обоих случаях, как при увеличении, так и уменьшении нагрузки, обеспечиваются условия, стабилизирующие угловую скорость вращения вала. В этом и заключается сущность процесса саморегулирования в связке: паровая машина — регулятор — нагрузка. Такой способ регулирования носит название обратной отрицательной связи. Если значение регулируемой величины превышает заданное, то регулятор действует так, чтобы уменьшить эту величину, и, наоборот, если значении этой величины меньше заданного, регулятор воздействует так, что эта величина возрастет.
Рассмотрим принципиальную или кинематическую схему САР (рисунок 1).
В схему входят следующие элементы: М – маховик (объект управления); КШ – конические шестерни, представляющие собой механическую передачу; ЦБМ – центробежный маятник (выполняет функции датчика, определяющего действительную угловую скорость, задатчика угловой скорости и сумматора, вычисляющего ошибку регулирования); З – заслонка; ПМ – паровая машина.
Заслонки с исполнительным пневматическим механизмом служат для изменения расхода жидкости или газа, протекающих по трубопроводам. Это дает возможность поддерживать постоянным или изменять по предварительно заданной программе уровень, температуру, давление или расход в отраслях промышленного производства. Они находят широкое применение в автоматизации теплоцентралей, насосных станций, обогатительных процессов пищевой промышленности, климатического оборудования и др. Могут использоваться как для совместной работы с регуляторами, так и для ручного и дистанционного управления процессам.
Маховик (Маховое колесо) — массивный вращающийся диск, использующийся в качестве накопителя (инерционный аккумулятор) кинетической энергии. Используется в машинах, имеющих неравномерное поступление или использование энергии, накапливая энергию, когда поступление энергии выше чем расход, и отдавая её, когда потребление превышает поступление энергии.
Паровая машина — тепловой двигатель внешнего сгорания, преобразующий энергию нагретого пара в механическую работу возвратно-поступательного движения поршня, а затем во вращательное движение вала. В более широком смысле паровая машина — любой двигатель внешнего сгорания, который преобразовывает энергию пара в механическую работу.
Некоторой установившейся нагрузке паровой машины соответствует определенная угловая скорость маховика, положение грузов ЦБМ, а также величина открытия З.
2 Оглавление Оглавление Анализ базовых технических решений, лежащих в основе двухпозиционного регулирования Характеристики двухпозиционных регуляторов Основные компоненты двухпозиционного регулятора Зона гистерезиса Процесс двухпозиционного регулирования и особенности настройки двухпозиционных регуляторов при отсутствии запаздывания в системе Факторы, влияющие на качество управления объектом Список источников
3 1. Анализ базовых технических решений, лежащих в основе двухпозиционного регулирования Характеристики двухпозиционных регуляторов. Двухпозиционными (регуляторами мы будем называть такие регуляторы, выходная величина которых может принимать только два установившихся значения [1] Основные компоненты двухпозиционного регулятора В соответствии с [1, стр. 4], автоматический регулятор в общем случае состоит из задающего устройства ЗУ, измерительного устройства ИУ, суммирующего устройства СУ, усилителя У и исполнительного механизма ИМ. Функциональная схема автоматического регулятора представлена на рис Автоматический регулятор, воздействуя на регулирующий орган РО, обеспечивает заданное значение регулируемой величины (парамeтpa) в регулируемом объекте. Так как регулирующий орган РО является устройством, воспринимающим регулирующее воздействие регулятора на объект, то РО принято рассматривать как составную часть объекта регулирования. В суммирующем устройстве регулятора значение регулируемой величины х, поступающее от измерительного устройства, сравнивается с ее заданным значением g(t), поступающим от задающего устройства. Если 3
4 действительное значение регулируемой величины не равно ее заданному значению, то их разность, или сигнал ошибки, e=g(t) x поступает на вход регулятора, который при этом воздействует на объект регулирования таким образом, чтобы восстановить заданное значение регулируемой величины объекта. Усилительное устройство регулятора усиливает сигнал ошибки 8, преобразует ее в тот или иной вид энергии, необходимый для управления исполнительным механизмом регулятора, а так же формирует требуемый закон регулирования регулятора. Подача значения регулируемой величины х на вход регулятора называется глазной обратной связью. В выходной величине измерительного устройства ИУ однозначно закодировано значение регулируемой величины в данный момент времени. Назначение измерительного элемента состоит в преобразовании регулируемой величины к виду, удобному для сравнения ее с задан-ным значением в суммирующем устройстве СУ. В связи с этим в современной теории автоматического регулирования при расчете системы оринято относить измерительное устройство к суммирующему устройству или объекту регулирования. Обозначим передаточную функцию регулятора Wp(p), а передаточную функцию объекта Wоб(p). Таким образом, система автоматического регулирования по каналу регулирующего воздействия может быть представлена в виде структурной схемы, изображенной на рис
6 гистерезиса используются в основном для упреждения или задержки включения (выключения) выходных устройств. Например, включение выходного устройства по значению задания SP меньшем на величину гистерезиса Н - включение с упреждением, или выключение выходного устройства по значению задания SP меньшем на величину гистерезиса Н - выключение с задержкой. Эти типы гистерезиса применяются для того, чтобы учесть инерционность объектов регулирования Процесс двухпозиционного регулирования и особенности настройки двухпозиционных регуляторов при отсутствии запаздывания в системе. Рассмотри объект без самовыравнивания в соответствии с [1, стр. 13]. Передаточная функция объекта без самовыравнивания имеет вид: При поступлении на.вход объекта от двухпозиционного регулятора величины х р = В (рис. 1-12,а) регулируемая величина будет изменяться по прямой (рис. 1-12,6) Если двухпозиционный регулятор имеет симметричную статическую характеристику (рис. 1-12,в) с зоной неоднозначности, то переключение регулятора будет.происходить при достижении регулируемой величиной граничных значений зоны неоднозначности (рис. 1-12,г и д). 6
7 В системе в установившемся состоянии (возникают периодические симметричные автоколебания регулируемой величины относительно ее заданного значения. Диапазон колебаний регулируемой величины Длительность положительного импульса t 1 в установившемся процессе равна длительности отрицательного импульса t 2 и равна полупериоду колебаний Период колебаний Частота переключений регулятора в единицу времени равна: 7
8 Если статическая характеристика регулятора имеет вид, представленный на рис. 1-7,б, то установившиеся колебания регулируемой величины имеют вид, приведенный на рис В этом случае длительность положительного и отрицательного импульсов в установившемся процессе соответственно равна: Период колебаний Частота переключения регулятора Согласно [3, стр. 31], показателями автоколебательного режима 8
9 являются амплитуда автоколебаний Ак и период автоколебаний Тк, причем частота и амплитуда колебаний зависят и определяются следующими величинами: от времени транспортного запаздывания τ d, от постоянной времени объекта τ О (определяется инерционностью объекта), от максимальной скорости R изменения параметра Х (определяется по переходной характеристике), от величины гистерезиса H переключательного элемента регулятора Факторы, влияющие на качество управления объектом. В источнике [1, стр. 14] выделены следующие факторы: Из рис и 1-13, а так же выражения (1-9) следует, что уменьшение диапазона колебания регулируемой величины возможно только за счет уменьшения зоны неоднозначности регулятора. Однако при этом следует иметь в виду, что уменьшение диапазона колебаний регулируемой величины приводит к увеличению частоты переключений регулятора. Так из выражений (1-12) и (1-15) следует, что при диапазоне колебаний регулируемой величины, стремящемся к нулю, частота переключений регулятора стремится к бесконечности. Из выражений (1-12) и (1-15) следует, что для уменьшения частоты переключений двухпозиционного регулятора необходимо уменьшить величину коммутируемой энергии В регулятором. В источнике [2, стр. 10], в качестве факторов, повышающих качество регулирования, представлены следующие рекомендации. Позиционный регулятор можно применять и получать приемлемые результаты, если выполняется условие на величину отношения τ Д /τ О 10 ΔTст/Tmax в установившемся режиме. Для повышении динамической точности регулирования следует уменьшать абсолютные значения постоянных времени объекта τ О и исполнительного устройства τ И, сохраняя при этом малой величину отношения τ Д /τ О. Сократить время выхода на режим можно, увеличивая на это время подводимую мощность, например, подключая дополнительные нагреватели или коммутируя нагреватели в трехфазной сети. В условиях, когда результаты измерений нестабильны и подвержены воздействию помех, а также в случаях, когда не допускается слишком частая коммутация нагревателей, в работе регулятора устанавливают некоторый гистерезис. Точность регулирования при этом, конечно же, понижается. В источнике [3, стр. 32], выделяются следующие зависимости между характеристиками объекта и процессом регулирования: Чем больше гистерезис Н, отношение τ Д /τ О, R - тем больше амплитуда колебаний Ак. Чем больше время запаздывания d и постоянная времени объекта τ О - тем больше период колебаний Тк. Точность регулирования технологического параметра, например, температуры зависит от величины гистерезиса. Чем меньше гистерезис, тем точнее регулирование, но тем чаще включается нагреватель и тем самым больше износ коммутационных элементов (например, реле). Уменьшая гистерезис можно повысить качество регулирования до некоторого предела, определяемого параметрами объекта регулирования (тепловой инерцией, мощностью нагревателя, тепловой связью нагревателя и объекта и др.). 10
Введение.
Основные понятия.
Описание схемы автоматического регулирования.
Список используемой литературы.
Дианов В.Г. Автоматическое регулирование и регуляторы в химической промышленности
- формат djvu
- размер 4.27 МБ
- добавлен 25 апреля 2011 г.
Главы: Системы автоматического регулирования. Характеристики систем автоматического регулирования и их элементов. Объекты регулирования и их свойства. Автоматические регуляторы и их характеристики. Пневматичесие регуляторы. Гидравлические регуляторы. Электрические регуляторы. Устойчивость САР и качество автоматического регулирования. Связанное регулирование, понятие об оптимизации. Пневматические средства системы Центр. Для инженеров химической и.
Каминский М.Л. Монтаж приборов контроля и аппаратуры автоматического регулирования и управления
- формат djvu
- размер 4.14 МБ
- добавлен 25 апреля 2009 г.
1978г. 311с. В книге приведены краткие сведения о классификации приборов контроля и аппаратуры автоматического регулирования и управления, принципе действия и устройстве приборов для Измерения температуры, давления, разрежения, расхода, количества, концентрации растворов, уровня, а также приборов для контроля состава, влажности и плотности газов. Рассмотрено устройство пневматических, гидравлических и электрических регуляторов и аппаратуры дистан.
Каминский М.Л., Каминский В.М. Монтаж приборов и систем автоматизации
- формат djvu
- размер 8.97 МБ
- добавлен 04 февраля 2010 г.
Учебник для СПТУ. 5-е изд., перераб. и доп. - М.: Высшая школа, 1983. -248 с., ил. В книге приведены краткие сведения о классификации приборов контроля и аппаратуры автоматического регулирования и дистанционного управления технологическими процессами в различных отраслях промышленности и на отдельных объектах гражданского назначения. Рассмотрен принцип действия приборов для измерения температуры, давления, разрежения, расхода, количества, уровня.
Кузнецов Е.В. Комплект из 7 компьютерных лабораторных стендов: электрические регуляторы со следящими системами
- формат doc, exe
- размер 8.82 МБ
- добавлен 03 апреля 2011 г.
Комплект содержит 7 программ лабораторных стендов систем автоматического регулирования: давления пара в котле, уровня воды в котле, температуры топлива за паровым подогревателем, частоты вращения турбонасоса, температуры воды в системе охлаждения дизеля, температуры масла в системе смазки дизеля, теоретического объекта регулирования (11 видов передаточных функций). Регуляторы имеют последовательное корректирующее устройство с типовыми законами ре.
Кузнецов Е.В. Следящие системы электрических регуляторов
- формат doc
- размер 1.25 МБ
- добавлен 31 октября 2010 г.
Учебное пособие. 2010. 168с Системы автоматического регулирования со следящей системой. Принципы управления электрическим ИМ с асинхронным электродвигателем. Тиристорный усилитель. Датчик положения исполнительного механизма. Следящие системы с переменной скоростью перемещения ИМ. Бесконтактные электродвигатели постоянного тока (БДПТ). Датчики положения ротора БДПТ (энкодеры, резольверы). Управление бесконтактными электродвигателями постоянного т.
Кузнецов Е.В. Электрические системы автоматизации судового энергетического оборудования
- формат doc
- размер 1.23 МБ
- добавлен 29 октября 2010 г.
Принципы регулирования. Регулирование по отклонению. Регулирование по возмущению. Комбинированное регулирование. Типовые системы автоматического регулирования. Система с параллельным корректирующим устройством. Система с последовательным корректирующим устройством. Комбинированная система. Каскадные системы. Законы регулирования. Обзор законов регулирования. Формирование законов регулирования в последовательных. корректирующих устройствах. Вычисл.
Курсовая работа - Техническое обеспечение системы автоматического регулирования состава отходящих газов в дымовой трубе
- формат doc
- размер 1.35 МБ
- добавлен 21 июля 2011 г.
Курсовой проект - Проектирование систем автоматизации. Разработка АСР соотношения топливо?воздух
- формат doc, dwg, pdf
- размер 641.4 КБ
- добавлен 18 ноября 2009 г.
Донбасский Государственный Технологический Университет. Автоматизация производственных и технолокических процессов топливно-энергетического комплекса. Пояснительная записка содержит 38 с. , 4 рис. , 4 источника, 5 приложений; графическая часть – 4 листа формата А2. Объектом разработки является система автоматического контроля и управления нагревательного колодца. Цель работы – разработка проектной документации для создания автоматической системы.
Мухин В.С., Саков И.А. Приборы контроля и средства автоматики тепловых процессов
- формат djvu
- размер 2.63 МБ
- добавлен 22 марта 2009 г.
Учеб. пособие для СПТУ. — М.: Высш. шк. , 1988. —256 с: ил. В книге приведено описание приборов контроля и средств автоматического регулирования теплоэнергетических процессов, в том числе автоматических регуляторов, исполнительных механизмов и регулирующих органов, рассмотрены особенности их эксплуатации в промышленных условиях, изложены способы измерения, контроля и др. Книга будет полезна инженерно техническому персоналу и студентам обучающимс.
Савичев С.С. Автоматика и автоматизация производственных процессов в кинематографии.
- формат djvu
- размер 1.89 МБ
- добавлен 29 сентября 2009 г.
М. 1990 – 271 с. Краткое изложение основ теории регулирования. Сведения об элементах автоматики, характеристиках систем регулирования. Основные принципы построения систем автоматического регулирования в кинематографии, их классификация. Вопросы автоматизации процессов на этапах съемки, печати, обработки и демонстрирования фильмов.
3.1. Регулирующие устройства и автоматические регуляторы.
3.2. Исполнительные механизмы.
3.3. Интерфейсные устройства.
Регулирующие устройства, и автоматические регуляторы, исполнительные механизмы, интерфейсные устройства
Регулирующие устройства и автоматические регуляторы.
В стандарте DIN 19226 дается следующее определение понятия "регулирующее устройство" и "регулятор":
Регулирующее устройство – это приборы, которые необходимы непосредственно для воздействия на объект регулирования в соответствии с поставленной задачей. В состав регулирующего устройства входят как минимум одно устройство для регистрации регулируемой величины x и для сравнения с задающей величиной w, а также одно устройство для формирования регулирующей величины y.
Регулятор – это прибор, который в рамках регулирующего устройства объединяет в себе выполнение нескольких функций, присущих регулирующему устройству. Однако для регулятора обязательно наличие сравнивающего устройства, а также как минимум еще одного важного функционального элемента, например усилителя или схемы задержки.
Автоматический регулятор - это устройство (совокупность устройств), посредством которого осуществляется процесс автоматического регулирования. Функционирование автоматического регулятора происходит в соответствии с алгоритмом регулирования, под которым понимают математическое выражение функциональной зависимости выходной величины регулятора от входной. Основная задача регуляторов заключается в формировании такого управляющего воздействия на объект регулирования в зависимости от измеренных отклонений регулируемой величины, чтобы восстановить требуемое состояние объекта. Автоматические регуляторы классифицируются по различным признакам (рис.3.1).
В зависимости от возможности изменять свой режим работы регуляторы подразделяются на два класса:
- детерминированные регуляторы не изменяют своих параметров в процессе регулирования;
- регуляторы с настройкой - экстремальные и адаптивные. Экстремальные - непрерывно производят поиск оптимальных значений выходных величин объекта. В адаптивных регуляторах происходит настройка параметров с целью достижения оптимального качества регулирования при изменении характеристик объекта во время его работы.
По наличию дополнительных источников энергии различают регуляторы:
- Регуляторы прямого действия управляют регулирующим органом за счет энергии, получаемой от регулируемой среды, и не требуют вспомогательной энергии.
- Регуляторы непрямого действия. В них имеются усилители мощности, управляющие поступлением энергии от постороннего источника. При этом в зависимости от вида используемой энергии различают электрические, пневматические, гидравлические и комбинированные регуляторы.
В зависимости от характера воздействия на объект имеются:
- регуляторы непрерывного действия - обеспечивают непрерывное изменение регулирующего воздействия. Во многих случаях к ним относят и регуляторы с импульсным перемещением регулирующего органа.
- регуляторы дискретного действия - изменяют регулирующее воздействие только в определенные моменты времени, в интервале между которыми регулирующее воздействие постоянно.
В зависимости от вида квантования входного сигнала подразделяются на:
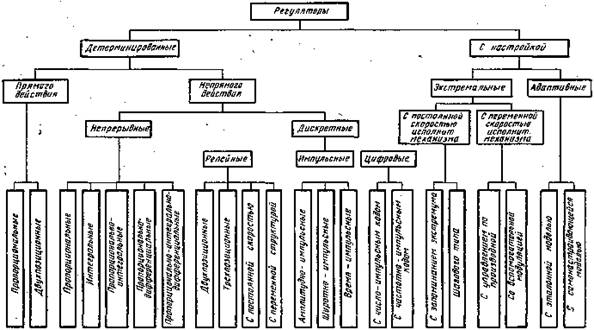
Рис.3.1. Классификация автоматических регуляторов дискретного действия
В соответствии с реализуемым законом регулирования регуляторы делятся на:
- релейные двух- и трехпозиционные и релейные с механизмами постоянной скорости.
По способности изменять свою структуру различают регуляторы:
- с фиксированной структурой - не изменяют свою структуру при изменении характеристик объектов регулирования;
- с переменной структурой – у них структура изменяется при изменении свойств объекта.
По характеру математической связи между выходной и входной координатами регуляторы подразделяются на:
В зависимости от конструктивного исполнения имеются регуляторы:
- приборного типа - в системе регулирования включается последовательно со вторичным прибором, в котором формируется сигнал ошибки;
- аппаратного типа - сами формируют сигнал ошибки и обычно включаются параллельно вторичному прибору;
- агрегатного типа – в них используется агрегатный принцип построения используется при стандартных сигналах на выходе датчиков. Такой принцип рекомендован ГСП и позволяет подключать любой стандартизованный датчик непосредственно к унифицированному входу регулятора.
В соответствии с числом регулируемых величин регуляторы подразделяются на:
Регуляторы классифицируются также по классу систем и фирмам-изготовителям.
Линейные регуляторы – это регуляторы, которые позволяют реализовать теоретические (стандартные) законы регулирования, называются идеальными. В этих регуляторах операции интегрирования, дифференцирования, суммирования и умножения на постоянный коэффициент выполняются абсолютно точно. Рассмотрим динамические характеристики регуляторов с различными стандартными законами регулирования.
Пропорциональные (П) регуляторы.
Закон регулирования П-регулятора выражается уравнением:
где kp - коэффициент пропорциональности, являющийся параметром настройки П-регулятора.
У пропорциональных регуляторов отклонение регулируемой величины X от ее заданного значения Х0 вызывает перемещение регулирующего органа на величину, пропорциональную этому отклонению x = Х0 - X.
Передаточная функция П-регулятора имеет вид:
Переходная характеристика П-регулятора показана на рис.3.2, а.
Величину, обратную коэффициенту пропорциональности регулятора, т.е. δр = 1/kр, называют статизмом, или коэффициентом неравномерности регулятора, а величину (1/kp) 100%-диапазоном дросселирования.
Рис.3.2. Переходные характеристики линейных идеальных регуляторов
Особенностью систем регулирования с П-регулятором является изменение регулируемой величины при различных нагрузках регулируемого объекта. Объясняется это тем, что перемещение регулирующего органа в новое положение, соответствующее новой нагрузке, может быть произведено только за счет отклонения регулируемой величины. Разность между максимальным и минимальным установившимися значениями регулируемой величины хшах называют остаточной неравномерностью П-регулятора, ее величина определяется выражением хшах = 1/kp.
Интегральные (И) регуляторы.
Процесс регулирования И-регулятором происходит по закону, который описывается уравнением:
где Ти - постоянная времени интегрирования, являющаяся параметром настройки И-регулятора.
Интегральные регуляторы производят перемещение регулирующего органа пропорционально интегралу отклонения регулируемой величины до тех пор, пока не восстановится ее заданное значение.
Передаточная функция И-регулятора имеет вид:
Переходная характеристика И-регулятора показана на рис.3.2, б. Интегральный регулятор не обладает остаточной неравномерностью, что является его положительной особенностью.
Пропорционально-интегральные (ПИ) регуляторы.
Закон регулирования ПИ-регулятора выражается уравнением:
где Ти — время интегрирования регулятора, или время изодрома. Коэффициент пропорциональности kp и постоянная времени Ти являются параметрами настройки ПИ-регулятора.
Уравнение закона регулирования ПИ-регулятора состоит из двух составляющих регулирующего воздействия: kpx - пропорциональной и - интегральной. Передаточная функция ПИ-регулятора имеет вид:
В динамическом отношении ПИ-регулятор представляет собой систему из двух параллельно включенных регуляторов: пропорционального и интегрального. При увеличении времени изодрома до бесконечности ПИ-регулятор превращается в П-регулятор. Если kp и Ти стремятся к нулю, но их отношение остается постоянным, то получим И-регулятор. Пропорционально-интегральные, как и интегральные, регуляторы не обладают остаточной неравномерностью. Переходная характеристика ПИ-регулятора показана на рис.3.2, в.
Пропорционально-дифференциальные(ПД) регулятор.
Закон регулирования ПД-регулятора выражается следующим уравнением:
где Тд - время дифференцирования, или время предварения регулятора, характеризующее степень влияния воздействия по производной на величину регулирующего воздействия. Коэффициент пропорциональности kp и постоянная времени Тд ПД-регулятора являются параметрами его настройки.
Передаточная функция ПД-регулятора:
Пропорционально-дифференциальный, как и пропорциональный, регулятор обладает остаточной неравномераостью, величина которой определяется выражением хшах = 1/kр.
Однако дополнительное воздействие по скорости отклонения регулируемой величины от заданного значения положительно влияет на процесс регулирования. Это является преимуществом ПД-регуляторов по сравнению с П-регуляторами. Переходная характеристика ПД-регулятора показана на рис.3.2, г.
Пропорционально-интегрально-дифференциальные (ПИД) регуляторы.
Закон регулирования ПИД-регулятор а определяется уравнением:
Параметрами настройки ПИД-регулятор а служат коэффициент пропорциональности kр и постоянные времени Тя и Тя.
Передаточная функция имеет вид:
В динамическом отношении эти регуляторы представляют собой систему из трех параллельно включенных звеньев: безынерционного, интегрирующего и идеального дифференцирующего. При ТД = 0 ПИД-регулятор превращается в ПИ-регулятор. ПИД-регуляторы не обладают остаточной неравномерностью. Переходная характеристика ПИД-регулятора показана на рис.3.2, д
Промышленные регуляторы состоят из реальных элементов, поэтому их динамические характеристики отличаются от динамических характеристик, определяемых уравнениями идеальных регуляторов.
Для оценки расхождения характеристик идеального и реального регуляторов передаточную функцию Wp(p) реального регулятора представляют в виде произведения передаточной функции Wид(р) идеального регулятора и передаточной функции Wб(p) некоторого балластного звена:
Если регулятор идеальный, то передаточная функция балластного звена W6(ρ) ≡ 1, его модуль W6(ω) ≡ 1, а фаза φ6(ω) ≡ 0. Чем больше передаточная функция балластного звена отличается от единицы, тем значительнее отличается качество регулирования в системах с идеальными и реальными регуляторами. Степень отличия реального регулятора от идеального для одного и того же типа прибора может быть различной, так как она зависит не только от структурной схемы и конструкции, но и от динамических настроек регулятора. Для регуляторов с нелинейными элементами частотные характеристики балластного звена зависят также от амплитуды входного сигнала.
Область в пространстве амплитуд, частот входного сигнала и параметров настройки регулятора, в пределах которой частотные характеристики идеального и реального регуляторов отличаются на величину, не превышающую некоторое наперед установленное значение, называют областью нормальной работы (ОНР) регулятора.
Частотные характеристики идеального и реального регуляторов согласно установленным нормам могут отличаться по модулю на ±10% и по фазе на ±15%. В пределах этих отклонений различием в динамических характеристиках можно пренебречь, а в расчетах использовать уравнения идеальных регуляторов.
Сопоставление по величине ОНР является удобным и наглядным методом оценки регуляторов, отрабатывающих одинаковый закон регулирования. Обычно оно проводится при одних и тех же заранее выбранных значениях, амплитуды и частоты входного сигнала в координатах параметров настройки регуляторов.
При оценке регулятора обычно исходят из того, что егоприменение целесообразно, если оптимальные значения параметров настройки, лежащие внутри ОНР, соответствуют динамическим характеристикам объектов управления. Из двух однотипных регуляторов, имеющий большую ОНР лучше, так как он в большей мере удовлетворяет требованиям универсальности, поскольку может быть использован на более широком классе объектов.
Если в результате расчета параметров настроек регулятора будут получены данные, не попадающие в ОНР, то нужно выбрать либо другой закон регулирования, либо применить регулятор другого типа, имеющий более широкую область допустимых настроек.
Автоматические регуляторы, формирующие один и тот же закон регулирования, могут быть построены по различным структурным схемам. Каждая из таких структурных схем обладает рядом достоинств и недостатков, которые необходимо учитывать при разработке регуляторов и при их эксплуатации. Анализ структурных схем позволяет не только оценить, насколько характеристики реального регулятора отличаются от характеристик идеального, но и установить причины этих отклонений. Рассмотрим некоторые структурные схемы.
1. П-регуляторы. Типичная структурная схема пропорционального регулятора (рис.3.3, а) состоит из усилительного и интегрирующего звеньев, охваченных жесткой отрицательной обратной связью. Интегрирующим звеном является исполнительный механизм, который служит для преобразования выходного сигнала регулирующего блока в механическое перемещение.
Если усилитель k1 считать безынерционным с конечным значением коэффициента усиления, а исполнительный механизм - идеальным интегрирующим звеном, то передаточная функция регулятора запишется в виде:
Рис.3.3. Структурная схема и переходные характеристики реального линейного П-регулятора
где ТИM - постоянная времени исполнительного механизма. Обозначим Тб = ТИM/δpk1 тогда передаточная функция балластного звена:
Таким образом, реальный регулятор, для которого справедливы названные допущения, можно представить в виде последовательного соединения идеального П-регулятора с коэффициентом усиления kp и балластного звена с передаточной функцией W6(p).
Балластное звено в этом случае будет представлять собой апериодическое звено первого порядка с постоянной времени Тб, величина которой растет с увеличением постоянной времени исполнительного механизма Тим и коэффициента пропорциональности регулятора kр.
Наличие балластного звена в П-регуляторе объясняется конечным значением коэффициента усиления k1. Действительно, если k1 → ∞, то Тб → 0, a Wp(p) = kp = WП(p), т.е. рассматриваемый регулятор становится идеальным. На рис. 88, б приведены переходные характеристики П-регулятора с балластным звеном при различных значениях Тб.
2. ПИ-регуляторы. Имеется несколько разновидностей схем ПИ-регуляторов. Наиболее часто используемая схема изображена на рис.3.4, а. Она представляет собой последовательное соединение усилительного и интегрирующего звеньев, причем первое охвачено отрицательной обратной связью с апериодическим звеном. По такой структурной схеме выполнены регуляторы электронной агрегатной унифицированной системы. Передаточная функция такого регулятора имеет следующий вид:
С учетом этих обозначений получим передаточную функцию балластного звена в виде:
В этом случае балластное звено представляет собой апериодическое звено с коэффициентом усиления k6 и постоянной времени.
Рис.3.4. Структурная схема и переходные характеристики реального линейного ПИ-регулятора.
Для данной структурной схемы коэффициент усиления регулятора зависит от постоянной времени ТИМ интегрирующего звена, т.е. от времени полного хода исполнительного механизма. Известно, что постоянная времени исполнительного механизма в свою очередь зависит от нагрузки, поэтому от нагрузки зависит и kp. В таких регуляторах наблюдается взаимосвязь обоих настроечных параметров - коэффициента усиления kp и времени интегрирования Ти.
Переходные характеристики регулятора со структурной схемой, изображенной на рис. 3.4, а, приведены на рис.3.4, б.
Видно, что при s=0 регулятор становится идеальным. Чем больше значение s, тем сильнее отклонение характеристики реального регулятора от характеристики идеального.
3. ПИД-регуляторы. Эти регуляторы также могут быть построены по различным структурным схемам. Одна из типичных структурных схем изображена на рис.3.5, а. Она позволяет строить ПИД-регуляторы из унифицированных блоков. Для формирования, пропорционально-интегральной составляющей сигнала регулирования используется блок, схема которого показана на рис.3.5, а. Дифференцирующий блок 1 конструктивно может выполняться отдельно от других блоков.
Рис.3.5. Структурная схема и переходные характеристики реального линейного ПИД-регулятора
Передаточная функция регулятора с такой структурной схемой может быть записана в виде:
В этом случае передаточная функция балластного звена имеет вид:
Это - передаточная функция апериодического звена второго порядка. Максимальное отношение ТД/ТИ = 0,25. Оно достигается при а = 2 или (T2/T1) (k2 + 1) = 1. Это обстоятельство может рассматриваться как недостаток подобных схем, поскольку ограничивает область применения ПИД-регуляторов. Переходные характеристики регуляторов приведены на рис.3.5, б. При регулятор становится идеальным.
Читайте также: