
Реферат на тему пуск двигателя постоянного тока
Обновлено: 16.05.2024
В начальный момент пуска двигателя якорь неподвижен и противо-э.д.с. и напряжение в якоре равна нулю.
Сопротивление цепи якоря невелико, поэтому пусковой ток превышает в 10 - 20 раз и более номинальный. Это может вызвать значительные электродинамические усилия в обмотке якоря и чрезмерный ее перегрев, поэтому пуск двигателя производят с помощью пусковых реостатов - активных сопротивлений, включаемых в цепь якоря. Двигатели мощностью до 1 кВт допускают прямой пуск.
Величина сопротивления пускового реостата выбирается по допустимому пусковому току двигателя. Реостат выполняют ступенчатым для улучшения плавности пуска электродвигателя.
В начале пуска вводится все сопротивление реостата. По мере увеличения скорости якоря возникает противо-э. д. с, которая ограничивает пусковые токи. Постепенно выводя ступень за ступенью сопротивление реостата из цепи якоря, увеличивают подводимое к якорю напряжение.
Механические характеристики электродвигателей постоянного тока
Рассмотрим двигатель с параллельным возбуждением в установившемся режиме работы (рис. 11.14). Обмотка возбуждения подключена параллельно якорной обмотке.
, откуда

(11.6)
Механической характеристикой двигателя называется зависимость частоты вращения якоря n2 от момента на валу M2 при U = const и Iв = const. Уравнение (11.6) является уравнением механической характеристики двигателя с параллельным возбуждением. Рис. 11.14
Эта характеристика является жесткой. С увеличением нагрузки частота вращения такого двигателя уменьшается в небольшой степени (рис. 11.15).
На рисунке 11.16 изображен двигатель последовательного возбуждения. Якорная обмотка и обмотка возбуждения включены последовательно. Рис. 11.15 Рис. 11.16
Ток возбуждения двигателя одновременно является током якоря. Магнитный поток индуктора пропорционален току якоря.

где k - коэффициент пропорциональности. Момент на валу двигателя пропорционален квадрату тока якоря.



Механическая характеристика двигателя последовательного возбуждения является мягкой (рис. 11.17). Рис. 11.17

Уравнение механической характеристики двигателя последовательного возбуждения выглядит следующим образом:
С увеличением нагрузки скорость двигателя резко падает. С уменьшением нагрузки на валу двигатель развивает очень большую частоту вращения. Говорят, что двигатель идет вразнос. Работа двигателя последовательного возбуждения без нагрузки недопустима. Двигатель смешанного возбуждения имеет механическую характеристику, представляющую собой нечто среднее между механическими характеристиками двигателя параллельного и последовательного возбуждения. Двигатели с параллельным возбуждением применяются для привода станков и различных механизмов, требующих широкой регулировки скорости. Двигатели с последовательным возбуждением применяются в качестве тяговых двигателей электровозов, трамваев и т.д.
Регулирование частоты вращения машин постоянного тока
В общем случае частота вращения двигателей постоянного тока определяется выражением
где U — напряжение, подводимое к якорю двигателя;1а — ток якоря; £Да— сумма сопротивлений якоря и всех последовательно
включенных обмоток; СЕ - коэффициент, зависящий от обмоточных данных двигателя; Ф — магнитный поток машины.
Из приведенного выражения следует, что частота вращения двигателя при неизменной нагрузке может быть изменена регулированием питающего напряжения U, включением последовательно с якорем дополнительного регулировочного резистора (изменение £.Ra) и изменением магнитного потока машины (изменением тока возбуждения). В практике применяются все три способа регулирования.
Регулирование частоты вращения изменением подводимого напряжения встречает трудности, связанные со сложностью пре-обра'зования напряжения постоянного тока. Для этой цели либо применяют статические преобразователи напряжения, либо питают двигатель от отдельного генератора постоянного тока, допускающего плавное регулирование напряжения (система генератор — двигатель). Такие системы применяют лишь для отдельных специальных приводов, требующих регулирования частоты вращения по сложной программе, например для главных двигателей прокатных станов.
Регулирование частоты вращения потоком является наиболее экономичным способом, так как потери в регулировочных резисторах, включаемых для этой цели последовательно с обмоткой возбуждения, невелики из-за малого тока возбуждения.
Однако этот способ позволяет лишь увеличивать частоту вращения двигателей по сравнению с номинальной. Такой способ регулирования предусмотрен для всех серийных двигателей постоянного тока.
Включение добавочного резистора в цепь якоря дает возможность плавно регулировать частоту вращения, но сопряжено с большими потерями в регулировочном реостате, по которому проходит полный ток нагрузки. Этот способ используется, например, для регулирования частоты вращения тяговых двигателей.
В современных системах регулирования частоты вращения двигателей постоянного тока применяются тиристорные схемы, позволяющие осуществить регулирование частоты вращения в широких пределах по заданной программе. Датчиками частоты вращения для осуществления обратной связи при регулировании могут быть тахогенера-торы, размещенные на валу якоря двигателя.
Электрические машины постоянного тока широко применяются в различных отраслях промышленности.
Значительное распространение электродвигателей постоянного тока объясняется их ценными качествами: высокими пусковым, тормозным и перегрузочным моментами, сравнительно высоким быстродействием, что важно при реверсировании и торможении, возможностью широкого и плавного регулирования частоты вращения.
Электродвигатели постоянного тока используют для регулируемых приводов, например, для приводов различных станков и механизмов. Мощности этих электродвигателей достигают сотен киловатт. В связи с автоматизацией управления производственными процессами и механизмами расширяется область применения маломощных двигателей постоянного тока общего применения мощностью от единиц до сотен ватт.
В зависимости от схемы питания, обмотки возбуждения машины постоянного тока разделяются на несколько типов (с независимым, параллельным, последовательным и смешанным возбуждением).
Ежегодный выпуск машин постоянного тока в РФ значительно меньше выпуска машин переменного тока, что обусловлено дороговизной двигателей постоянного тока.
Вначале создавались машины постоянного тока. В дальнейшем они в значительной степени были вытеснены машинами переменного тока. Благодаря возможности плавного и экономичного регулирования скорости вращения двигатели постоянного тока сохраняют свое доминирующее значение на транспорте, для привода металлургических станков, в крановых и подъемно-транспортных механизмах. В системах автоматики машины постоянного тока широко используются в качестве исполнительных двигателей, двигателей для привода лентопротяжных самозаписывающих механизмов, в качестве тахогенераторов и электромашинных усилителей.
2. Устройство и принцип действия двигателей постоянного тока
Устройство машин постоянного тока (генераторов и двигателей) в упрощенном виде показано на рис.1. К стальному корпусу 1 статора машины прикреплены главные 2 и дополнительные 4 полюса. На главных полюсах расположена обмотка возбуждения 3, на дополнительных - обмотка дополнительных полюсов 5. Обмотка возбуждения создает магнитный поток Ф машины.

На валу 10 двигателя закреплен цилиндрический магнитопровод 6, в пазах которого расположена обмотка якоря 7. Секции обмотки якоря присоединены к коллектору 9. К нему же прижимаются пружинами неподвижные щетки 8. Закрепленный на валу двигателя коллектор состоит из ряда изолированных от него и друг от друга медных пластин. С помощью коллектора, и щеток осуществляется соединение обмотки якоря с внешней электрической цепью. У двигателей они, кроме того, служат для преобразования постоянного по направлению тока внешней цепи в изменяющийся по направлению ток в проводниках обмотки якоря.
Дополнительные полюса с расположенной на них обмоткой уменьшают искрение между щетками и коллектором машины. Обмотку дополнительных полюсов соединяют последовательно с обмоткой якоря и на электрических схемах часто не изображают.
Для уменьшения потерь мощности магнитопровод якоря выполнен из отдельных стальных листов. Все обмотки изготовлены из изолированного провода. Кроме двигателей, имеющих два главных полюса, существуют машины постоянного тока с четырьмя и бόльшим количеством главных полюсов. При этом соответственно увеличивается количество дополнительных полюсов и комплектов щеток.
Если двигатель включен в сеть постоянного напряжения, то при взаимодействии магнитного поля, созданного обмоткой возбуждения, и тока в проводниках якоря возникает вращающий момент, действующий на якорь:

(1)

(2)
где КМ - коэффициент, зависящий от конструктивных параметров машины; Ф - магнитный поток одного полюса; IЯ - ток якоря.
Если момент двигателя при n = 0 превышает тормозящий момент, которым нагружен двигатель, то якорь начнет вращаться. При увеличении частоты вращения n возрастает индуцируемая в якоре ЭДС. Это приводит к уменьшению тока якоря:

(3)
где rЯ - сопротивление якоря.
Следствием уменьшения тока IЯ является уменьшение момента двигателя. При равенстве моментов двигателя и нагрузки частота вращения перестает изменяться.
Направление момента двигателя и, следовательно, направление вращения якоря зависят от направления магнитного потока и тока в проводниках обмотки якоря. Чтобы изменить направление вращения двигателя, следует изменить направление тока якоря либо тока возбуждения.
3. Пуск двигателей
Из формулы (3) следует, что в первое мгновение после включения двигателя в сеть постоянного напряжения, т.е. когда и ,

Так как сопротивление rЯ невелико, то ток якоря может в 10…30 раз превышать номинальный ток двигателя, что недопустимо, поскольку приведет к сильному искрению и разрушению коллектора. Кроме того, при таком токе возникает недопустимо большой момент двигателя, а при частых пусках возможен перегрев обмотки якоря.
Чтобы уменьшить пусковой ток в цепи якоря, включают пусковой резистор, сопротивление которого по мере увеличения частоты вращения двигателя уменьшают до нуля. Если пуск двигателя автоматизирован, то пусковой резистор выполняют из нескольких ступеней, которые выключают последовательно по мере увеличения частоты вращения.
Пусковой ток якоря

По мере разгона двигателя в обмотке якоря возрастает ЭДС, а как следует из формулы (3), это приводит к уменьшению тока якоря IЯ . Поэтому по мере увеличения частоты вращения двигателя сопротивление в цепи якоря уменьшают. Чтобы при сравнительно небольшом пусковом токе получить большой пусковой момент, пуск двигателя осуществляют с наибольшим магнитным потоком. Следовательно, ток возбуждения при пуске должен быть максимально допустимым, т.е. номинальным.
4.Технические данные двигателей
В паспорте двигателя и справочной литературе на двигатели постоянного тока указаны следующие технические данные: номинальные напряжение Uи , мощность Pн , частота вращения nн, ток Iн , КПД.
Под номинальным Uн понимают напряжение, на которое рассчитаны обмотка якоря и коллектор, а также в большинстве случаев и параллельная обмотка возбуждения. С учетом номинального напряжения выбирают электроизоляционные материалы двигателя.
Номинальный ток Iн – максимально допустимый ток (потребляемый из сети), при котором двигатель нагревается до наибольшей допустимой температуры, работая в том режиме (длительном, повторно-кратковременном, кратковременном), на который рассчитан:

где Iян — ток якоря при номинальной нагрузке; Iвн – ток обмотки возбуждения при номинальном напряжении.
Следует отметить, что ток возбуждения Iвн двигателя параллельного возбуждения сравнительно мал, поэтому при номинальной нагрузке обычно принимают

Номинальная мощность Рн - это мощность, развиваемая двигателем на валу при работе с номинальной нагрузкой (моментом) и при номинальной частоте вращения nн .
Частота вращения nн, и КПД соответствуют работе двигателя с током Iн , напряжением Uн без дополнительных резисторов в цепях двигателя.
В общем случае мощность на валу P2 , момент М и частота вращения n связаны соотношением:

Потребляемая двигателем из сети мощность Р1 , величины P2, КПД, U, I связаны соотношениями:



где
Очевидно, что эти соотношения справедливы также и для номинального режима работы двигателя.
5. КПД двигателей постоянного тока

Коэффициент полезного действия является важнейшим показателем двигателей постоянного тока. Чем он больше, тем меньше мощность Р и ток I, потребляемые двигателем из сети при одной и той же механической мощности. В общем виде зависимостьть такова:

(9)
где - потери в обмотке якоря; - потери в обмотке возбуждения; - потери в магнитопроводе якоря; - механические потери.
Потери мощности не зависят, и мало зависят от нагрузки двигателя.
Двигатели рассчитываются таким образом, чтобы максимальное значение КПД было в области, близкой к номинальной мощности. Эксплуатация двигателей при малых нагрузках нежелательна вследствие малых значений rя . Значения КПД двигателей с различными способами возбуждения и мощностью от 1 до 100 кВт при номинальной нагрузке разные и составляют в среднем 0,8.
6.Характеристики двигателей постоянного тока
6.1. Рабочие характеристики
Рабочими называются регулировочная, скоростная, моментная и к.п.д. характеристики.
Регулировочная характеристика
Регулировочная характеристика представляет зависимость скорости вращения П от тока Iв возбуждения в случае, если ток Iа якоря и напряжение U сети остаются неизменными, т. е. n=f(Iв) при Ia=const и U=const.

Рис. 2. Регулировочная характеристика двигателя
В двигателях последовательного возбуждения Iв = Iа. При малых нагрузках ток якоря Iа мал и скорость вращения может быть слишком большой, поэтому пуск и работа при малых нагрузках недопустимы. Микродвигатели так же, как и. в предыдущем случае, могут составлять исключение.
Скоростные характеристики.
Скоростные характеристики дают зависимость скорости вращения п от полезной мощности Р2 на валу двигателя в случае, если напряжение U сети и сопротивление rв регулировочного реостата цепи возбуждения остаются неизменными, т. е. n=f(P2), при U=const и rв = const.

Рис. 3. Скоростные характеристики
С возрастанием тока якоря при увеличении механической нагрузки двигателя параллельного возбуждения одновременно увеличивается падения напряжения в якоре и появляется реакция якоря, которая обычно действует размагничивающим образом. Первая причина стремится уменьшить скорость вращения двигателя, вторая — увеличить. Действие падения напряжения в якоре обычно оказывает большее влияние. Поэтому скоростная характеристика двигателя параллельного возбуждения имеет слегка падающий характер (кривая 1, рис. 3).
В двигателе последовательного возбуждения ток якоря является током возбуждения. В результате скоростная характеристика двигателя с последовательным возбуждением имеет характер, близкий к гиперболическому. При увеличении нагрузки по мере насыщения магнитной цепи характеристика приобретает более прямолинейный характер (кривая 3 на рис. 3).
В компаундном двигателе при согласном включении обмоток скоростная характеристика занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения (кривая 2).
Моментные характеристики.
Моментные характеристики показывают, как изменяется момент М при изменении полезной мощности Р2 на валу двигателя, если напряжение U сети и сопротивление rв регулировочного реостата в цепи возбуждения остаются неизменными, т. е. М = f(P2), при U=const, rв=const.
Полезный момент на валу двигателя

Если скорость вращения двигателя параллельного возбуждения не изменялась бы с нагрузкой, то зависимость момента Ммех от полезной мощности графически представляла бы прямую линию, проходящую через начало координат. В действительности скорость вращения с увеличением нагрузки падает. Поэтому характеристика полезного момента несколько загибается кверху (кривая 2, рис. 4). При этом кривая электромагнитного момента М проходит выше кривой полезного момента Ммех на постоянную величину, равную моменту холостого хода М0 (кривая 1).

Рис. 4. Моментные характеристики
В двигателе последовательного возбуждения вид моментной характеристики приближается к параболическому, так как изменение момента от тока нагрузки происходит, по закону параболы, пока сталь не насыщена. По мере насыщения зависимость приобретает более прямолинейный характер (кривая 4). В компаундном двигателе моментная характеристика (кривая 3) занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения.
Характеристика изменения коэффициента полезного действия.
Кривая зависимости к. п. д. от нагрузки имеет характерный для всех двигателей вид (рис 5). Кривая проходит через начало координат и быстро растет при увеличении полезной мощности до 1/4 номинальной. При мощности Р2, равной примерно 2/3 номинальной, к. п. д. обычно достигает максимального значения. При увеличении нагрузки до номинальной к. п. д. остается постоянным или незначительно падает.
Автор: Евгений Живоглядов.
Дата публикации: 04 марта 2013 .
Категория: Статьи.
При пуске двигателя в ход необходимо: 1) обеспечить надлежащий пусковой момент и условия для достижения необходимой скорости вращения; 2) предотвратить возникновение чрезмерного пускового тока, опасного для двигателя.
Возможны три способа пуска двигателя в ход: 1) прямой пуск, когда цепь якоря подключается непосредственно к сети на ее полное напряжение; 2) пуск с помощью пускового реостата или пусковых сопротивлений, включаемых последовательно в цепь якоря; 3) пуск при пониженном напряжении цепи якоря.
Прямой пуск
В нормальных машинах Rа = 0,02 – 0,1, и поэтому при прямом пуске с U = Uн ток якоря недопустимо велик:
Вследствие этого прямой пуск применяется только для двигателей мощностью до нескольких сотен ватт, у которых Rа относительно велико и поэтому при пуске Iа ≤ (4 – 6) Iн, а процесс пуска длится не более 1 – 2 с.
Пуск с помощью пускового реостата или пусковых сопротивлений
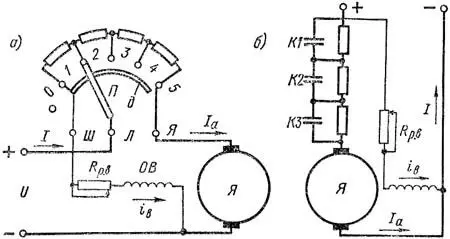
Рисунок 1. Схема пуска двигателя параллельного возбуждения с помощью пускового реостата (а) и пусковых сопротивлений (б)
Для двигателей с параллельным возбуждением самым распространенным является пуск с помощью пускового реостата или пусковых сопротивлений (рисунок 1).
При этом вместо выражения (5), в статье "Общие сведения о двигателях постоянного тока" имеем
а в начальный момент пуска, при n = 0,
где Rп – сопротивление пускового реостата, или пусковое сопротивление. Значение Rп подбирается так, чтобы в начальный момент пуска было Iа = (1,4 – 1,7) Iн [в малых машинах до (2,0 – 2,5) Iн].
Рассмотрим подробнее пуск двигателя параллельного возбуждения с помощью реостата (рисунок 1, а).
При подаче напряжения на электродвигатель происходит скачок напряжения, который называется пусковым током. Пусковой ток часто выше номинального от 5 до 10 раз, но отличается своей кратковременностью.
Процессы, протекающие при пуске двигателя
Когда на обмотке статора увеличивается токовая нагрузка, одновременно с этим увеличивается крутящий момент двигателя, передающийся на вал ротора. Резкое увеличение крутящего момента может вызвать резкое повышение температуры обмотки статора и привести к неисправностям в изоляции, что может стать причиной вибраций, механических деформаций и выхода двигателя из строя.
Чтобы избежать поломки электродвигателя, сразу после начала его работы пусковой ток понижается до номинальных частот вращения. Для снижения пускового тока применяют несколько способов, которые также позволяют стабилизировать напряжение электропитания. Существует несколько способов запуска двигателей постоянного тока.
Прямой пуск электродвигателя постоянного тока
При прямом пуске подключение обмотки якоря происходит непосредственно к электрической сети. Это означает, что двигатель подключается к источнику электропитания при своем номинальном напряжении. Прямой пуск электродвигателя используется, когда есть стабильное питание двигателя, который жестко связан с приводом. Это один из самых простых методов пуска.
Преимуществом прямого пуска является то, что при таком запуске температура повышается не столь значительно, если сравнивать с другими методиками. Если отсутствуют специальные ограничения на поступающий от электросети ток, то такой способ считается наиболее предпочтительным. Те электродвигатели, что предназначаются для частых пусков и отключений, оборудуются специальной системой управления, с контактором и термореле, которые защищают прибор от поломки.
Если электродвигатели имеют малую мощность и работают без частых остановок и пусков, то для его включения требуется самое примитивное оборудование. Обычно им является вручную работающий расцепитель. При такой схеме непосредственно на сами клеммы двигателя и подается напряжение. Для электродвигателей небольших размеров пусковой момент составляет 150–300 % от номинального, а сам пусковой ток — 300–800%.
Прямой пуск имеет то ограничение, что пик нагрузки некоторых крупных двигателей может быть в 15, а иногда и в 50 раз больше номинального. Такие нагрузки совершенно недопустимы, поэтому такой способ пуска применяется лишь на двигателях малой мощности.
Реостатный пуск электродвигателя постоянного тока
Реостатный пуск, в отличие от прямого, не имеет ограничений на мощность двигателя, поэтому его часто применяют на приборах большой мощности. Реостат для пуска изготавливается из провода, который имеет высокое удельное сопротивление и разделен на секции. Ток возбуждения, который возникает при включении двигателя, устанавливается таким образом, чтобы соответствовать номинальным значениям. Это необходимо для того, чтобы при пуске развивался максимально большой допустимый момент, что необходимо для быстрого разгона двигателя.
Реостатный пуск осуществляется вместе с последовательным уменьшением сопротивления реостата, что позволяет не допускать скачков электрического тока и гарантирует безопасность при включении даже самых мощных электродвигателей.
Пуск электродвигателя путем изменения питающего напряжения
Пуск путем изменения питающего напряжения является еще одним способом начать работу электродвигателя. При использовании реостатного пуска могут возникнуть большие потери энергии непосредственно в самом пусковом реостате. Для того чтобы избежать этих потерь и повысить экономичность и энергоэффективность, двигатель запускается с помощью очень плавного постепенного повышения напряжения, которое подается на обмотку якоря. Для такого способа требуется отдельный источник постоянного тока, с помощью которого можно регулировать напряжение. Для этого используют генераторы и управляемые выпрямители. Пуск путем изменения питающего напряжения двигателя является обычной практикой на тепловозах.
Пусковые качества двигателя тем выше, чем больше его пусковой момент при пусковом токе, не превышающем допустимый. Пуск происходит быстро и легко, если двигатель развивает пусковой момент, существенно превышающий момент сопротивления на валу. Поэтому пуск производят при максимальном магнитном потоке, для чего перед пуском необходимо полностью вывести регулировочный реостат RB в цепи возбуждения… Читать ещё >
Пуск двигателя постоянного тока ( реферат , курсовая , диплом , контрольная )
Пуском называют процесс разгона якоря двигателя от неподвижного состояния до установившегося значения частоты вращения, когда Мвр = Мс. В процессе пуска вращающий момент должен быть больше момента сопротивления (Мвр > Мс). Пуск характеризуется:
- 1) кратностью пускового тока /п//иом;
- 2) кратностью пускового момента Мп/Ммом;
- 3) временем (длительностью) пуска ?п.
При пуске двигателя необходимо обеспечить надлежащее значение пускового момента и предотвратить возникновение чрезмерного пускового тока, опасного для двигателя. Возможны три способа пуска двигателя:
- 1) прямой, при котором обмотка якоря непосредственно подключается к сети;
- 2) реостатный, с помощью пускового реостата, включаемого последовательно в цепь якоря;
- 3) при пониженном напряжении, подводимом к якорю.
При прямом пуске в первый момент при ?? = 0 В якоре не наводится противо-ЭДС (Е = 0) и согласно выражению (2.3.4) начальный пусковой ток ограничивается только малым внутренним сопротивлением обмотки якоря:

Такой большой ток вызывает опасное искрение на коллекторе (см. параграф 2.2) и чрезмерно большой пусковой момент Мп = смФп1п, создающий рывок или удар на валу, отрицательно воздействующий на передачу и рабочий механизм, приводимый во вращение двигателем. На рис. 2.8.1 приведены кривые изменения во времени тока якоря, вращающего момента, ЭДС и частоты вращения двигателя при прямом пуске без нагрузки на валу. В первый момент пуска возникают большой ток якоря и вращающий момент, а затем, но мере разгона якоря двигателя возрастает его противо-ЭДС и, следовательно, уменьшаются ток якоря согласно выражению (2.3.4) и момент, развиваемый двигателем. Когда вращающий момент становится равным моменту сопротивления на валу, возрастание частоты вращения прекращается (п = const). Прямой пуск применяется для двигателей малой мощности (до 1 кВт), у которых сопротивление относительно велико, разгон происходит быстро (?п 2.8.1. Зависимости от времени тока якоря /я, электромагнитного момента М, ЭДС Е и частоты вращения п при пуске двигателя постоянного тока.
Наибольшее распространение получил реостатный пуск. Для ограничения пускового тока в цепь якоря двигателя включают специальный пусковой реостат, сопротивление которого Rn выбирают с таким расчетом, чтобы пусковой ток не превышал (2—2,5)/ном. Пусковой реостат предназначен для кратковременной работы, поэтому по мере увеличения частоты вращения двигателя пусковой реостат выводят, что вызывает рост тока и вращающего момента, превышающего момент сопротивления, и дальнейшее возрастание частоты вращения.
На рис. 2.8.2 приведены графики п (М), /я(?), n (t), полученные при моделировании реостатного пуска двигателя независимого возбуждения без нагрузки на валу с помощью моделирующей программы (см. параграф 5.2). Пуск начинается при полностью включенном пусковом реостате. В первый момент пуска, когда частота вращения п равна нулю, возникают бросок тока.

Рис. 2.8.2. Моделирование реостатного пуска двигателя постоянного тока
(Модель) 1
якоря и большой пусковой момент, под действием которого якорь двигателя начинает разгоняться. При увеличении частоты вращения п увеличивается противо-ЭДС в якорной обмотке, что согласно выражению (2.3.4) приводит к уменьшению тока якоря. При разгоне якоря двигателя сопротивление пускового реостата уменьшается ступенями, при этом возникают небольшие импульсы тока и вращающего момента (см. графики п (М)> IJjt) на рис. 2.8.2). Когда частота вращения достигнет установившегося значения, пусковой реостат выводится полностью и двигатель перейдет в установившийся режим работы при холостом ходе.
Моделирующая программа позволяет определить текущие значения параметров в любой точке на графиках, приведенных на рис. 2.8.2, с помощью двух визирных линеек (горизонтальной и вертикальной), изображенных в виде пунктирных линий. Значения параметров указываются в окнах справа от графиков. На рис. 2.8.2 в окнах указаны значения частоты вращения в режиме холостого хода (пх =1560 об/мин), пускового момента (Мп = 26,73 Н • м), пускового тока (/п= 20,41 А) и времени пуска (?п= 1,11 с).
Пусковые качества двигателя тем выше, чем больше его пусковой момент при пусковом токе, не превышающем допустимый. Пуск происходит быстро и легко, если двигатель развивает пусковой момент, существенно превышающий момент сопротивления на валу. Поэтому пуск производят при максимальном магнитном потоке, для чего перед пуском необходимо полностью вывести регулировочный реостат RB в цепи возбуждения ["https://referat.bookap.info", 16].
Количество ступеней пускового реостата и значения их сопротивлений рассчитываются из условий ограничения пускового тока, надежной коммутации и создания на валу двигателя необходимого вращающего момента. По условиям нагрева ступени реостата рассчитываются на кратковременную работу. Пусковые реостаты применяются с ручным или автоматическим управлением.
В двигателях большой мощности пусковой реостат становится громоздким и вызывает значительные потери энергии, особенно при частых пусках. В этом случае можно использовать безреостатный пуск при пониженном напряжении, подводимом к якорю двигателя от источника с регулируемым напряжением, например, в системах генератор — двигатель (Г—Д).
Среди всех электродвигателей двигатели постоянного тока имеют лучшие пусковые качества. При относительно небольшом пусковом токе ((2—2,5)/иом) они могут создавать достаточно большой пусковой момент ((2,5—4)А/мом). Это обеспечивает быстрый разгон приводимых ими механизмов.
Читайте также: