
Реферат на тему колебательные движения
Обновлено: 08.07.2024
Колебания – один из самых распространенных процессов в природе и технике.
Колеблются крылья насекомых и птиц в полете, высотные здания и высоковольтные провода под действием ветра, маятник заведенных часов и автомобиль на рессорах во время движения, уровень реки в течение года и температура человеческого тела при болезни.
Звук – это колебания плотности и давления воздуха, радиоволны – периодические изменения напряженностей электрического и магнитного полей, видимый свет – тоже электромагнитные колебания, только с несколько иными длиной волны и частотой.
Землетрясения – колебания почвы, приливы и отливы – изменение уровня морей и океанов, вызываемое притяжением Луны и достигающее в некоторых местностях 18 метров, биение пульса – периодические сокращения сердечной мышцы человека и т.д.
Смена бодрствования и сна, труда и отдыха, зимы и лета. Даже наше каждодневное хождение на работу и возвращение домой попадает под определение колебаний, которые трактуются как процессы, точно или приближенно повторяющиеся через равные промежутки времени.
Колебания бывают механические, электромагнитные, химические, термодинамические и различные другие. Несмотря на такое разнообразие, все они имеют между собой много общего и поэтому описываются одними и теми же уравнениями.
Свободными колебаниями называются колебания, происходящие благодаря начальному запасу энергии, приданному колеблющемуся телу.
Чтобы тело совершало свободные колебания, необходимо вывести его из состояния равновесия.
Специальный раздел физики – теория колебаний – занимается изучением закономерностей этих явлений. Знать их необходимо судо- и самолетостроителям, специалистам промышленности и транспорта, создателям радиотехнической и акустической аппаратуры.
Большой вклад в изучение колебаний внесли многие ученые: английские – У. Томсон (лорд Кельвин) и Дж. Рэлей, русские – А.С. Попов и П.Н. Лебедев и другие.
КОЛЕБАНИЯ НИТЯНОГО МАЯТНИКА
Далее рассматривается действующая модель математического маятника в реальном времени
Красным цветом изображается вектор силы тяжести, синим - силы реакции, желтым - силы сопротивления, бордовым - равнодействующей силы. Для остановки маятника нажать кнопку "Стоп" в окне "Управление" или щелкнуть кнопкой мыши внутри главного окна программы. Для продолжения движения действия повторить.

Дальнейшие колебания нитяного маятника, выведенного из состояния равновесия, происходят
под действием результирующей силы, которая является суммой двух векторов: силы тяжести
и силы упругости.
Результирующая сила в данном случае называется возвращающей силой.
МАЯТНИК ФУКО В ПАРИЖСКОМ ПАНТЕОНЕ
Что доказал Жан Фуко?
Маятник Фуко служит для демонстрации вращения Земли вокруг своей оси. На длинном тросе подвешен тяжелый шар. Он качается взад-вперед над круглой площадкой с делениями.
Через какое-то время зрителям начинает казаться, что маятник качается уже над другими делениями. Кажется, что маятник повернулся, но это не так. Это повернулся вместе с Землей сам круг!

Для всех факт вращения Земли очевиден хотя бы потому, что день сменяет ночь, то есть за 24 часа совершается один полный оборот планеты вокруг своей оси. Вращение Земли можно доказать многими физическими опытами. Самым знаменитым из них был опыт, проведенный Жаном Бернаром Леоном Фуко в 1851 году в парижском Пантеоне в присутствии императора Наполеона. Под куполом здания физик подвесил металлический шар массой 28 кг на стальной проволоке длиной 67 м. Отличительной особенностью этого маятника было то, что он мог свободно качаться во всех направлениях. Под ним было сделано ограждение с радиусом 6 м, внутри которого насыпали песок, чьей поверхности касалось острие маятника. После того как маятник привели в движение, стало очевидно, что плоскость качания поворачивается относительно пола по часовой стрелке. Это следовало из того, что при каждом следующем качании острие маятника делало отметку на 3 мм дальше предыдущего. Это отклонение и объясняет то, что Земля совершает вращение вокруг своей оси.
В 1887 году принцип действия маятника был продемонстрирован и в и, в Исаакиевском соборе Петербурга. Хотя сегодня увидеть его нельзя, так как теперь он хранится в фонде музея-памятника. Сделано это было для того, чтобы восстановить первоначальную внутреннюю архитектуру собора.
СДЕЛАЙ МОДЕЛЬ МАЯТНИКА ФУКО САМ

Переверни табуретку вверх ножками и положи на концы её ножек (по диагонали) какую-нибудь рейку. А к середине её подвесь небольшой груз (например, гайку)ни нити. Заставь его качаться так, чтобы плоскость качания проходила между ножек табуретки. Теперь медленно поворачивай табуретку вокруг её вертикальной оси. Тебе станет заметно, что маятник качается уже в другом направлении. На самом деле он качается всё также, а изменение произошло из-за поворота самой табуретки, которая в этом опыте играет роль Земли.

Это маятник Максвелла, он позволяет выявить ряд интересных закономерностей движения твердого тела. К диску, насаженному на ось, привязаны нити. Если закрутить нить вокруг оси, диск поднимется. Теперь отпускаем маятник, и он начинает совершать периодическое движение: диск опускается, нить раскручивается. Дойдя до нижней точки, по инерции диск продолжает вращаться, но теперь уже закручивает нить и поднимается вверх.
Обычно крутильный маятник применяется в механических наручных часах. Колесико-балансир под действием пружины вращается то в одну, то в другую сторону. Его равномерные движения обеспечивают точность хода часов.
СДЕЛАЙ КРУТИЛЬНЫЙ МАЯТНИК САМ
В аэродинамике известно явление, называемое флаттером, - самопроизвольные колебания крыла в полете, приводящее к его поломке и аварии. Для гашения вредных колебаний переднюю кромку каждого крыла стали утяжелять. Природа также выработала средство борьбы с флаттером. У стрекоз, например, на каждом крыле, в вершинной его части, у переднего края имеется темное хитиновое утолщение.
Колебания – один из самых распространенных процессов в природе и технике. Колеблются высотные здания и высоковольтные провода под действием ветра, маятник заведенных часов и автомобиль на рессорах во время движения, уровень реки в течение года и температура человеческого тела при болезни.
Содержание
Вложенные файлы: 1 файл
A.docx
- Виды и характеристики колебаний.
- Механические колебания…………………………………………….
- Электомагнитные колебания………………………..
- дифференциальное уравнение (его вид одинаков для любых колеблющихся систем);
- уравнение колебаний;
- амплитуда;
- частота или период колебаний;
- фаза;
- начальная фаза.
- атом состоит из протонов, нейтронов и электронов;
- математический маятник состоит из подвеса и тела, имеющего массу;
- твёрдое тело состоит из молекул или атомов.
Колебания – один из самых распространенных процессов в природе и технике. Колеблются высотные здания и высоковольтные провода под действием ветра, маятник заведенных часов и автомобиль на рессорах во время движения, уровень реки в течение года и температура человеческого тела при болезни.
Звук – это колебания плотности и давления воздуха, радиоволны – периодические изменения напряженностей электрического и магнитного полей, видимый свет – тоже электромагнитные колебания, только с несколько иными длиной волны и частотой. Землетрясения – колебания почвы, приливы и отливы – изменение уровня морей и океанов, вызываемое притяжением Луны и достигающее в некоторых местностях 18 метров, биение пульса – периодические сокращения сердечной мышцы человека и т.д. Смена бодрствования и сна, труда и отдыха, зимы и лета.
Даже наше каждодневное хождение на работу и возвращение домой попадает под определение колебаний, которые трактуются как процессы, точно или приближенно повторяющиеся через равные промежутки времени.
Колебания бывают механические, электромагнитные, химические, термодинамические и различные другие. Несмотря на такое разнообразие, все они имеют между собой много общего и поэтому описываются одними и теми же дифференциальными уравнениями. Специальный раздел физики – теория колебаний – занимается изучением закономерностей этих явлений. Знать их необходимо судо- и самолетостроителям, специалистам промышленности и транспорта, создателям радиотехнической и акустической аппаратуры.
Большой вклад в изучение колебаний внесли многие ученые: английские – У. Томсон (лорд Кельвин) и Дж. Рэлей , русские – А.С. Попов и П.Н. Лебедев, советские – А.Н. Крылов, Л.И. Мандельштам, Н.Д. Папалекси, Н.Н. Боголюбов, А.А. Андронов и другие.
1.Виды колебаний и их характеристики.
Колебательными процессами (колебаниями) называются движения или изменения состояния, обладающие той или иной степенью повторяемости во времени.
Колебания называются периодическими, если значения физических величин, изменяющиеся в процессе колебаний, повторяются через равные промежутки времени Т, называемые периодом.
В зависимости от физической природы и механизма возбуждения колебаний различают:
- механические колебания (колебания маятников, струн, балок, частей машин и механизмов, качка кораблей, волнение моря, колебания давления при распространении звука в газе, жидкости, твердом теле и т.д.);
- электромагнитные колебания (переменный ток, колебания тока, заряда, векторов E и H в колебательных контурах и т.д.);
- электромеханические колебания (колебания мембран телефонов, диффузоров электродинамических громкоговорителей и т.д.).
Колебательные движения отличаются от других видов движений. Они характеризуются некоторыми общими признаками. На языке теории колебаний различия между колебательным движением тела и процессами в колебательных электромагнитных контурах исчезают, если подходить к ним с точки зрения общих принципов. Такой подход называется электромеханическими аналогиями.
Система, совершающая колебания, называется колебательной системой.
Колебания, которые возникают вследствие какого-либо начального отклонения системы от ее устойчивого равновесия, называются собственными колебаниями.
Колебания, возникающие в системе под влиянием переменного внешнего воздействия, называются вынужденными колебаниями.
Общие признаки и понятия, единые для различных колебательных систем, следующие:
Рассмотрим колебания в механической и электромагнитной системах, выделяя именно перечисленные выше признаки.
1.1.Механические колебания.
В зависимости от характера воздействия на колеблющуюся систему различают свободные колебания, вынужденные колебания, автоколебания и параметрические колебания.
Свободными называют такие колебания, которые происходят в системе, предоставленной самой себе после того, как ей был сообщен толчок либо она была выведена из положения равновесия. Примером могут служить колебания шарика, подвешенного на нити (маятник). Для того чтобы вызвать колебания, можно либо толкнуть шарик, либо отведя в сторону, отпустить его.
Вынужденными называются такие колебания, в процессе которых колеблющаяся система подвергается воздействию внешней периодически изменяющейся силы. Примером служат колебания моста, возникающие при прохождении по нему людей, шагающих в ногу.
Автоколебания, как и вынужденные колебания, сопровождаются воздействием на колеблющуюся систему внешних сил, однако моменты времени, когда осуществляются эти воздействия, задаются самой колеблющейся системой – система сама управляет внешним воздействием. Примером автоколебательной системы являются часы, в которых маятник получает толчки за счет энергии поднятой гири или закрученной пружины, причем эти толчки происходят в моменты прохождения маятника через среднее положение. При параметрических колебаниях за счет внешнего воздействия происходит периодическое изменение какого-либо параметра системы, например длины нити, к которой подвешен шарик, совершающий колебания.
Простейшими являются гармонические колебания, т.е. такие колебания, при которых колеблющаяся величина (например, отклонение маятника) изменяется со временем по закону синуса или косинуса. Этот вид колебаний особенно важен по следующим причинам: во-первых, колебания в природе и в технике часто имеют характер, очень близкий к гармоническим, и, во-вторых, периодические процессы иной формы (с другой зависимостью от времени) могут быть представлены как наложение нескольких гармонических колебаний.
В качестве механической колебательной системы, на примере которой мы будем рассматривать колебания, выбираем пружинный маятник: маленькое тело (материальная точка) массой m подвешено на пружине с жесткостью k (Рисунок 2).
Ненагруженная пружина имела длину l0. Когда подвесили тело, пружина удлинилась на ∆l. Возникшая упругая сила уравновесила силу тяжести . Это соотношение позволяет определить положение равновесия пружинного маятника. Если теперь тело сместить относительно положения равновесия на расстояние х, то на тело будет действовать сила упругости и сила тяжести.
Равнодействующая этих сил равна:
Знак минус означает, что направление силы Fупр. и направление смещения х противоположны. Fупр. - сила упругости, возникающая при смещении тела относительно положения равновесия за счет сжатия или растяжения пружины (в зависимости от того, в какую сторону от положения равновесия отклонено тело). Качественно на Рисунке 1.1 виден результат действия упругой силы ( чем больше смещение, тем больше Fупр.).
Рисунок 1.1 – Положения пружинного маятника за время одного периода колебаний.
Если система совершает колебания под действием сил, развивающихся в самой колебательной системе без внешних воздействий и без учета сил сопротивления, то колебания называются незатухающими собственными колебаниями.
Отсутствие затухания колебаний характерно для идеальной колебательной системы, которая является физической моделью реальных физических процессов.
Дифференциальное уравнение, соответствующее колебаниям пружинного маятника, можно получить из закона его движения, которым является 2-й закон Ньютона ma = F.
Учитывая, что ускорение есть вторая производная от смещения по времени
,
а сила, действующая на тело, есть сила упругости, определяемая для малых смещений тела от положения равновесия по закону Гука, как , получим
Это дифференциальное уравнение второго порядка для незатухающих колебаний. Основной его отличительной особенностью является тот факт, что вторая производная от смещения по времени (т.е. ускорение) пропорциональна смещению. Дифференциальное уравнение, в которое величина х входит в нулевой или первой степени, называется линейным дифференциальным уравнением. В дальнейшем мы покажем, что подобного рода уравнения характерны для незатухающих колебаний в любой идеальной колебательной системе.
Перенесем все члены уравнения в левую часть и приведем дифференциальное уравнение к виду:
Величина , обозначим ее , получим
Решением дифференциального уравнения такого вида являются уравнения:
Эти решения называются уравнениями колебаний, они позволяют вычислить смещение х пружинного маятника в любой момент времени.
Колебания, при которых характеризующие их физические величины изменяются по закону синуса или косинуса, называются гармоническими.
Отличие аргументов функций синуса и косинуса составляет , т.е. .
В дальнейшем чаще всего мы будем использовать решение дифференциального уравнения в виде .
В уравнении колебаний:
А – амплитуда смещения – максимальное отклонение маятника от положения равновесия;
х – смещение маятника, т.е. отклонение колеблющейся точки (тела) от положения равновесия в момент времени t;
– фаза колебаний – величина, определяющая положение колеблющейся точки в любой момент времени t;
α – начальная фаза определяет положение маятника в начальный момент времени (t = 0).
Периодом T называется наименьший интервал времени, за который система возвращается в исходное положение. За период колебаний система совершает одно полное колебание.
Частотой периодических колебаний называется величина , равная числу колебаний, совершаемых за единицу времени.
Циклической или круговой частотой периодических колебаний называется величина , равная числу колебаний, совершаемых за единиц времени.
Для пружинного маятника частота и период собственных колебаний в зависимости от параметров системы имеют вид:
Зная уравнение смещения пружинного маятника, получим подобные уравнения для других физических величин. Найдем скорость, ускорение, энергию колебаний, если уравнение смещения пружинного маятника задано в виде .
Скорость колебаний маятника есть первая производная по времени от смещения:
Колебания – это движение тела, в ходе которого оно многократно движется по одной и той же траектории и проходит при этом одни и те же точки пространства. Примерами колеблющихся объектов могут служить - маятник часов, струна скрипки или фортепиано, вибрации автомобиля.
Колебания играют важную роль во многих физических явлениях за пределами области механики. Например, напряжение и сила тока в электрических цепях могут колебаться. Биологическими примерами колебаний могут служить сердечные сокращения, артериальный пульс и производство звука голосовыми связками.
Хотя физическая природа колеблющихся систем может существенно отличаться, разнообразные типы колебаний могут быть охарактеризованы количественно сходным образом. Физическая величина, которая изменяется со временем при колебательном движении, называется смещением. Амплитуда представляет собой максимальное смещение колеблющегося объекта от положения равновесия. Полное колебание, или цикл – это движение, при котором тело, выведенное из положения равновесия на некоторую амплитуду, возвращается в это положение, отклоняется до максимального смещения в противоположную сторону и возвращается в свое первоначальное положение. Период колебания T – время, необходимое для осуществления одного полного цикла. Число колебаний за единицу времени - это частота колебаний.
Простое гармоническое колебание
В некоторых телах при их растяжении или сжатии возникают силы, противодействующие этим процессам. Эти силы прямо пропорциональны длине растяжения или сжатия. Таким свойством обладают пружины. Когда тело, подвешенное к пружине, отклоняют от положения равновесия, а потом отпускают, его движение представляет собой простое гармоническое колебание.
Рассмотрим тело массой m, подвешенное на пружине в положении равновесия. Смещая тело вниз, можно вызвать колебание тела. Если - смещение тела от положения равновесия, то в пружине возникает сила F (сила упругости), направленная в противоположную смещению сторону. В соответствии с законом Гука, сила упругости пропорциональна смещению Fупр = -k·S , где k - константа, которая зависит от упругих свойств пружины. Сила является отрицательной, поскольку она стремится вернуть тело в положение равновесия.
Действуя на тело массой m, сила упругости придает ему ускорение вдоль направления смещения. Согласно закону Ньютона F = ma, где a = d2S/d2t. Для упрощения последующих рассуждений пренебрежем трением и вязкостью в колеблющейся системе. В таком случае амплитуда колебаний не будет изменяться со временем.
Если не действуют никакие внешние силы (даже сопротивление среды) на колеблющиеся тело, то колебания осуществляются с определенной частотой. Эти колебания называются свободными. Амплитуда таких колебаний остается постоянной.
Таким образом, m·d2S/d2t = -k·S (1) . Перемещая все члены равенства и деля их на m, получим уравнения d2S/d2t +(k/m)·S = 0,
а затем d2S/d2t +ω02·S = 0 (2), где k/m = ω02
Уравнение (2) является дифференциальным уравнением простого гармонического колебания.
Решение уравнения (2) дает две функции:
S = A sin(ω0t + φ0) (3) и S = A cos(ω0t + φ0) (4)
Таким образом, если тело массой m осуществляет простые гармонические колебания, изменение смещения этого тела от точки равновесия во времени осуществляется по закону синуса или косинуса.
(ω0t + φ0) - фаза колебания с начальной фазой φ0. Фаза является свойством колебательного движения, которое характеризует величину смещения тела в любой момент времени. Измеряется фаза в радианах.
Величина называется угловой, или круговой, частотой. Измеряется в радианах, деленных за секунду ω0 = 2πν или ω0 = 2π/T (5)
График уравнения простого гармонического колебания представлен на Рис. 1. Тело, первоначально смещенное на расстояние А – амплитуды колебания, а затем отпущенное, продолжает колеблется от -A и до A за время T - период колебания.
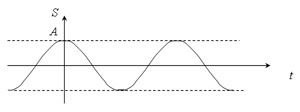
Рис 1.
Таким образом, в ходе простого гармонического колебания величина смещения тела изменяется во времени вдоль синусоиды или косинусоиды. Поэтому простое гармоническое колебание часто называют синусоидальным колебанием.
Простое гармоническое колебание имеет следующие основные характеристики:
a) движущееся тело попеременно находится по обе стороны от положения равновесия;
б) тело повторяет свое движение за определенный интервал времени;
c) ускорение тела всегда пропорционально смещению и направлено противоположно ему;
д) графически этот тип колебания описывает синусоида.
Простое гармоническое колебание не может продолжаться сколь угодно долго при постоянной амплитуде. В реальных условиях через некоторое время гармонические колебания прекращаются. Такие гармонические колебания в реальных системах называются затухающим колебаниями (рис.2). К снижению амплитуды колебаний с последующим их прекращением приводит действие внешних сил, например, трения и вязкости. Эти силы уменьшают энергию колебаний. Они называются диссипативными силами, поскольку способствуют рассеиванию потенциальной и кинетической энергии макроскопических тел в энергию теплового движения атомов и молекул тела.

Рис 2.
Величина диссипативных сил зависит от скорости тела. Если скорость ν сравнительно мала, то диссипативная сила F прямо пропорциональна этой скорости Fтр = -rν = -r·dS/dt (6)
Здесь r - постоянный коэффициент, независимый от скорости или частоты колебаний. Знак минус указывает на то, что тормозящая сила направлена против вектора скорости движения.
Принимаясь во внимание действие диссипативных сил, дифференциальное уравнение гармонического затухающего колебания имеет вид: m·d2S/d2t = -kS - r·dS/dt.
Перенеся все члены равенства в одну сторону, разделив каждый член на m и заменяя k/m = ω2,r/m = 2β , получим дифференциальное уравнение свободных гармонических затухающих колебаний
где β - коэффициент затухания, характеризующий затухание колебаний за единицу времени.
Решением уравнения является функция S = A0·e-βt ·sin(ωt + φ0) (8)
Уравнение (8) показывает, что амплитуда гармонического колебания уменьшается экспоненциально во времени. Частота затухающих колебаний определяется уравнением ω = √(ω02 - β2) (9)
Если колебание не может происходить вследствие большого , то система возвращается в свое положение равновесия по экспоненциальному пути без колебания.
Вынужденное колебание и резонанс
Если не сообщать колеблющейся системе внешнюю энергию, то амплитуда гармонического колебания уменьшается во времени из-за диссипативных эффектов. Периодическое действие силы может увеличить амплитуду колебаний. Теперь колебание не будет затухать со временем, поскольку потерянная энергия восполняется в течение каждого цикла действием внешней силы. Если будет достигнут баланс этих двух энергий, то амплитуда колебаний будет оставаться постоянной. Эффект зависит от соотношения частот вынуждающей силы ω и собственной частоты колебания системы ω0.
Если тело колеблется под действием внешней периодической силы с частотой этой внешней силы, то колебание тела называется вынужденным.
Энергия внешней силы оказывает наибольшее действие на колебания системы, если внешняя сила обладает определенной частотой. Эта частота должна быть такой же, как и частота собственных колебаний системы, которые бы эта система совершала в отсутствие внешних сил. В таком случае происходит резонанс – явление резкого возрастания амплитуды колебаний при совпадении частоты вынуждающей силы с частотой собственных колебаний системы.
Механические волны
Распространение колебаний из одного места в другое называется волновым движением, или просто волной.
Механические волны образуются вследствие простых гармонических колебаний частиц среды от их среднего положения. Вещество среды не перемещается при этом из одного места в другое. Но частицы среды, передающие друг другу энергию, необходимы для распространения механических волн.
Таким образом, механическая волна является возмущением материальной среды, которое проходит эту среду с определенной скоростью, не изменяя своей формы.
Если в воду бросить камень, от места возмущения среды побежит одиночная волна. Однако волны иногда могут быть периодическими. Например, вибрирующий камертон производит попеременные сжатия и разрежения окружающего его воздуха. Эти возмущения, воспринимаемые как звук, происходят периодически с частотой колебаний камертона.
Существуют механические волны двух видов.
(1) Поперечная волна. Этот вид волн характеризуется вибрацией частиц среды под прямым углом к направлению распространения волны. Поперечные механические волны могут возникать только в твердых веществах и на поверхности жидкостей.
В поперечной волне все частицы среды осуществляют простое гармоническое колебание возле своих средних положений. Положение максимального смещения вверх называется "пиком", а положение максимального смещения вниз - "впадиной". Расстояние между двумя последующими пиками или впадинами называется длиной поперечной волны λ.
(2) Продольная волна. Этот вид волн характеризуется колебаниями частиц среды вдоль направления распространения волны. Продольные волны могут распространяться в жидкостях, газах и твердых телах.
В продольной волне все частицы среды также осуществляют простое гармоническое колебание около их среднего положения. В некоторых местах частицы среды расположены ближе, а в других местах - дальше, чем в нормальном состоянии.
Места, где частицы расположены близко, называются областями сжатия, а места где они находятся далеко друг от друга - областями разрежения. Расстояние между двумя последовательными сжатиями или разрежениями называются длиной продольной волны.
Выделяют следующие характеристики волн.
(1) Амплитуда - максимальное смещение колеблющейся частицы среды от ее положения равновесия (A).
(2) Период – время, необходимое частице для одного полного колебания (T).
(3) Частота - количество колебаний, произведенных частицей среды, за единицу времени (ν). Между частотой волны и ее периодом существует обратная зависимость: ν = 1/T .
(4) Фаза колеблющейся частицы в любой момент определяет ее положение и направление движения в данный момент. Фаза представляет собой часть длины волны или периода времени.
(5) Скорость волны является скоростью распространения в пространстве пика волны (v).
Совокупность частиц среды, колеблющихся в одинаковой фазе, формирует фронт волны. С этой точки зрения, волны делятся на два вида.
(1) Если источник волны является точкой, из которой она распространяется во всех направлениях, то образуется сферическая волна.
(2) Если источник волны колеблющаяся плоская поверхность, то образуется плоская волна.
Смещение частиц плоской волны можно описать общим уравнением для всех типов волнового движения: S = A·sin ω · (t - x/v) (10)
Это означает, что величина смещения (S) для каждой значения времени (t) и расстояния от источника волны (x) зависит от амплитуды колебания (A), угловой частоты (ω) и скорости волны (v).
Эффект Доплера
Эффект Доплера - изменение частоты волны, воспринимаемой наблюдателем (приемником) благодаря относительному движению источника волн и наблюдателя. Если источник волн приближается к наблюдателю, число волн, прибывающих к наблюдателю волн, каждую секунду превышает испускаемое источником волн. Если источник волн удаляется от наблюдателя, то число испускаемых волн больше, чем прибывающих к наблюдателю.
Аналогичный эффект следует в случае, если наблюдатель перемещается относительно неподвижного источника.
Примером эффекта Доплера является изменение частоты гудка поезда при его приближении и удалении от наблюдателя.
Общее уравнение для эффекта Доплера имеет вид
Здесь νисточн - частота волн, испускаемых источником, и νприемн - частота волн, воспринятая наблюдателем. ν0 - скорость волн в неподвижной среде, νприемн и νисточн - скорости наблюдателя и источника волн соответственно. Верхние знаки в формуле относятся к случаю, когда источник и наблюдатель перемещаются друг к другу. Нижние знаки относятся к случаю удаления друг от друга источника и наблюдателя волн.
Изменение частоты волн вследствие эффекта Доплера называют доплеровским сдвигом частоты. Этот феномен используется для измерения скорости перемещения различных тел, включая эритроциты в кровеносных сосудах.
Колебательные движения широко распространены в окружающей нас жизни. Колебания совершают раскачивающиеся качели (рис. \(2\)), маятник часов (рис. \(3\)), игла швейной машины (рис. \(1\)), крылья насекомых при полёте (рис. \(4\)) и многих других тел.
Конечно, движения этих тел многим и отличаются. Так качели совершают движение по дуге окружности, а игла швейной машины — по прямой; у крыльев стрекозы меньший размах, чем у маятника часов. Комариные крылья совершают большое количество колебаний за то же время, за которое качели могут совершить всего одно.
Эти движения объединяет свойство колеблющегося объекта повторять траекторию движения и находиться в одних и тех же точках через равные промежутки времени.
На анимации шарик, подвешенный на нити, совершает колебания (рис. \(5\)). Через равные промежутки времени он возвращается в одни и те же точки траектории. Затем движение повторяется, т.е. оно является периодичным.
чтобы заставить качели совершать колебательные движения, нужно сначала вывести их из положения равновесия, оттолкнувшись ногами, либо сделать это руками.
Колебания, происходящие благодаря только начальному запасу энергии колеблющегося тела при отсутствии внешних воздействий на него, называются свободными колебаниями.
а) система должна находиться в положении устойчивого равновесия: при отклонении системы от положения равновесия должна возникать сила, стремящаяся вернуть систему в положение равновесия — возвращающая сила;
б) наличие у системы избыточной механической энергии по сравнению с её энергией в положении равновесия;
в) избыточная энергия, полученная системой при смещении её из положения равновесия, не должна быть полностью израсходована на преодоление сил трения при возвращении в положение равновесия, т. е. силы трения в системе должны быть достаточно малы.
Физическая система — множество взаимосвязанных элементов, отделённых от окружающей среды, взаимодействующих с ней как целое.
Колебательные движения основаны на действии возвращающей силы, которая является суммой остальных сил. Например, сила тяжести и сила упругости математического маятника.
Рассмотрим колебания шарика на нити (рис. \(6\)). При отклонении шарика от положения равновесия свободные колебания возникают под действием силы тяжести и силы упругости. Равнодействующая этих сил направлена к положению равновесия.
Маятник — твёрдое тело, совершающее колебания под действием приложенных сил около положения равновесия.
груз, подвешенный на пружине и совершающий колебательные движения по вертикали под действием сил упругости, называется пружинным маятником (рис. \(7\)).
Рис. 5. Колебания математического маятника.
Рис. 6. Силы, действующие на шарик. © ЯКласс.
Рис. 7. Колебания пружинного маятника.
Читайте также: