
Приведите примеры систем управления без обратной связи и с обратной связью подготовьте реферат
Обновлено: 02.07.2024
Файлы: 1 файл
утс.docx
Обра́тная связь в технике — это процесс, приводящий к тому, что результат функционирования какой-либо системы влияет на параметры, от которых зависит функционирование этой системы. Другими словами, на вход системы подаётся сигнал,пропорциональный её выходному сигналу
Система управления — систематизированный (строго определённый) набор средств сбора сведений о подконтрольном объекте и средств воздействия на его поведение, предназначенный для достижения определённых целей. Объектом системы управления могут быть как технические объекты, так и люди. Объект системы управления может состоять из других объектов, которые могут иметь постоянную структуру взаимосвязей.
Техническая структура управления — устройство или набор устройств для манипулирования поведением других устройств или систем.
Объектом управления может быть любая динамическая система или её модель. Состояние объекта характеризуется некоторыми количественными величинами, изменяющимися во времени, то есть переменными состояния. В естественных процессах в роли таких переменных может выступать температура, плотность определенного вещества в организме, курс ценных бумаг и т. д. Для технических объектов это механические перемещения (угловые или линейные) и их скорость, электрические переменные, температуры и т. д. Анализ и синтез систем управления проводится методами специального раздела математики — теории управления.
Структуры управления разделяют на два больших класса:
Автоматизированные системы управления (АСУ) — с участием человека в контуре управления;
Система автоматического управления(САУ) — без участия человека в контуре управления.
Система автоматического управления, как правило, состоит из двух основных элементов — объекта управления и управляющего устройства.
Объект управления — изменение состояния объекта в соответствии с заданным законом управления. Такое изменение происходит в результате внешних факторов, например, вследствие управляющих или возмущающих воздействий.
По виду информации в управляющем устройстве
В замкнутых системах автоматического регулирования управляющее воздействие формируется в непосредственной зависимости от управляемой величины. Связь выхода системы с его входом называется обратной связью. Сигнал обратной связи вычитается из задающего воздействия. Такая обратная связь называется отрицательной.
В свою очередь, различают:
Разомкнутые по задающему воздействию
Разомкнутые по возмущающему воздействию
Примеры систем автоматического управления
В зависимости от природы управляемых объектов можно выделить биологические, экологические, экономические и технические системы управления. В качестве примеров технического управления можно привести:
Системы дискретного действия или автоматы (торговые, игровые, музыкальные).
Системы стабилизации уровня звука, изображения или магнитной записи. Это могут быть управляемые комплексы летательных аппаратов, включающие в свой состав системы автоматического управления двигателя, рулевыми механизмами, автопилоты и навигационные системы
Системы управления с участием людей как объектов управления зачастую называют системами менеджмента.
В процессе управления человек с помощью органов чувств воспринимает информацию об окружающей среде (состояние дороги, дорожные знаки, сигналы светофора, наличие встречного транспорта, пешеходов и т. д.). Эта информация через органы чувств передается в мозг человека, где преобразуется в другую информацию — последовательность сигналов, передающихся по нервным путям и управляющих движением ног и рук водителя, воздействующих на руль, сцепление, тормоза и другие устройства автомобиля.
Этот пример показывает, что без информации, ее передачи, преобразования и использования управление невозможно. В основе любого процесса управления лежат информационные процессы.
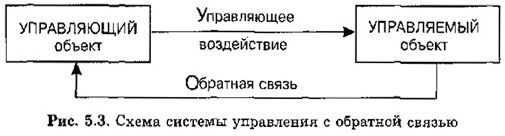
В любом процессе управления всегда происходит взаимодействие двух систем — управляющей и управляемой. Если они соединены каналами прямой и обратной связи, то такую систему называют замкнутой или системой с обратной связью.
По каналу прямой связи передаются сигналы (команды) управления, вырабатываемые в управляющем органе. Подчиняясь этим командам, управляемый объект осуществляет свои рабочие функции. В свою очередь, управляемый объект соединен с управляющим органом каналом обратной связи, по которому поступает информация о состоянии управляемого объекта. В управляющем органе эта информация используется для выработки новых сигналов управления, направляемых к управляемому объекту.
Рассмотрим простейший пример управления — поддержание постоянно заданной температуры в электрической печи (или термостате). Выполняя эту задачу вручную (без применения средств автоматики), человек должен: 1) наблюдать за показаниями термометра, 2) сравнивать эти показания с заданной температурой и 3) при наличии разности между заданным и наблюдаемым значениями передвигать ползунок регулируемого реостата, изменяя силу тока и температуру электронагревательного прибора таким образом, чтобы эта разность стремилась к нулю.
Структура автоматической системы, предназначенной для решения такой задачи, сводится к схеме, изображенной на рисунке.
с заданным значением и при наличии расхождения передает соответствующую команду на исполнительный орган, который и восстанавливает заданное значение регулируемой величины (в нашем случае — температуры). В качестве исполнительных органов используются устройства, непосредственно воздействующие на технологический процесс (двигатели, электромагниты и т. п.).
Такие системы представляют собой типичный пример систем автоматического регулирования.

Принцип, по которому построены техника автоматического регулирования, состоит в том, что регулятор изменяет регулирующее воздействие при отклонении регулируемой переменной от заданного значения независимо от причин, вызвавших это отклонение. Таким образом, в зависимости от значения выходного сигнала объекта регулятор изменяет его входной сигнал. Вот о том, из чего состоит техника автоматического регулирования, мы и поговорим в этой статье.

Термины и определения
(в соответствии с DIN 19226)
Управление с обратной связью
Процессы управления с обратной связью осуществляются в автомобиле в самых различных системах. В качестве примера можно привести регулирование температуры охлаждающей жидкости двигателя, управление кондиционером и многие другие операции регулирования и управления двигателем (контроль детонации, контроль значения λ), трансмиссией (управление сцеплением) и шасси (контроль рыскания).
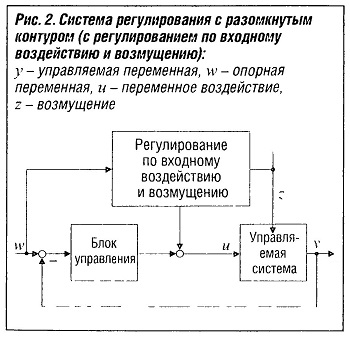
Системы управления без обратной связи
Довольно часто используются также системы регулирования и управления без обратной связи (с разомкнутым контуром). В этом случае замкнутая система управления заменяется на разомкнутую. Этот процесс возможен только в том случае, если поведение управляемой системы точно известно, и на нее не воздействуют никакие (не поддающиеся измерению) возмущения z.
Управление с обратной связью является предпочтительным, поскольку при этом со стабильностью управляемой величины не возникает проблем, связанных с отсутствием обратной связи. Поскольку вышеупомянутые условия на практике имеют место весьма редко, использование систем с обратной связью в большинстве случаев является неизбежным.
Комбинация замкнутых (с обратной связью) и разомкнутых (без обратной связи) контуров управления
На практике, с целью использования преимуществ обеих структур, часто осуществляется комбинирование замкнутых и разомкнутых контуров управления. При этом установленные связи между опорной переменной, возмущением, корректирующей переменной и управляемой переменной используются в максимальной степени с целью реализации системы управления с разомкнутым контуром.
Каскадное управление
Проектирование блоков управления (контроллеров) упрощается за счет разделения задачи управления на несколько поддающихся управлению подзадач. Имеют место дополнительные преимущества в отношении динамической характеристики системы, связанные с тем, что возмущения, действующие во внутреннем контуре управления, корректируются там до того, как они начинают влиять на внешний контур управления. Это ускоряет весь процесс управления. Кроме того, это позволяет линеаризовать нелинейные характеристические кривые внутреннего контура.
Каскадное управление применяется во многих автомобильных системах регулирования, например, в системах регулирования электрического тока электрогидравлических исполнительных механизмов или в системах позиционирования исполнительных механизмов с электроприводом.
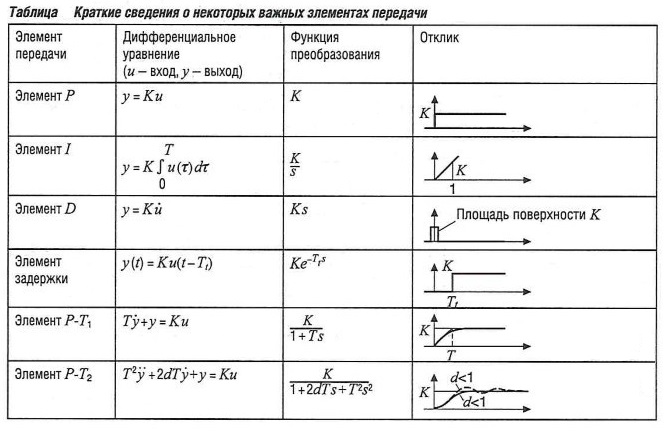
Техника автоматического управления, элементы передачи
В отношении рабочих характеристик система управления должна отвечать четырем основным требованиям:
- Система управления должна быть стабильной:
- Система управления должна демонстрировать требуемую стационарную точность;
- Реакция на скачкообразное изменение опорной переменной должна в достаточной степени демпфироваться:
- Система управления должна обладать достаточным быстродействием.
Для того чтобы выполнить эти частично противоречащие друг другу требования, сначала необходимо описать статические и динамические реакции элементов системы управления (самой регулируемой системы и блока управления) с использованием подходящих методов, чтобы иметь возможность проанализировать реакции системы управления и спроектировать блок управления в соответствии с заданными требованиями. Это описание может быть выполнено во временном диапазоне (например, при помощи дифференциальных уравнений) или в определенной полосе частот (например, с использованием функции преобразования или диаграммы Боде).
Задачей синтеза системы управления является разработка для данной регулируемой системы соответствующего блока управления (структуры и параметров элемента передачи), который отвечает вышеуказанным требованиям. Для этой цели существует ряд процедур (например, динамическая коррекция в диаграмме Боде, метод корневого годографа, детализация полюсов, регулятор Риккати в пространстве состояний), которые индивидуально дополняются теми или иными конкретными функциями или шагами проектирования.
Описанная ниже систематизированная процедура показала свою полезность на практике.
Разработка задачи управления
Задача управления
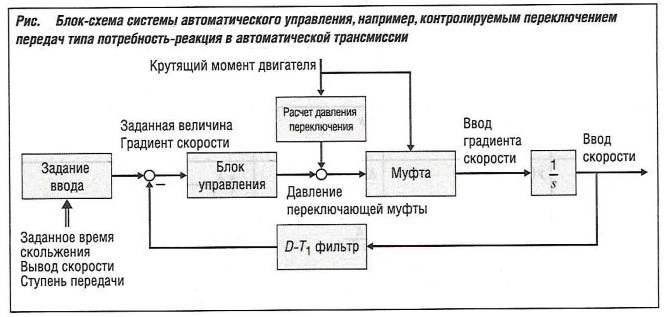
Как правило, задача управления не формулируется специально как таковая, но должна быть выработана на основании требований, предъявляемых к конкретному техническому процессу. Это подразумевает определение задач управления с использованием замкнутых и разомкнутых систем с целью решения вопросов, касающихся того, что должно быть достигнуто при помощи функции управления, и с применением каких переменных будет описываться цель управления. В качестве примера можно привести контролируемое переключение передач типа потребность-реакция в автоматической трансмиссии. С помощью этой функции давление переключающей муфты должно быть во время переключения передачи приведено в соответствие с градиентом скорости таким образом, чтобы время проскальзывания оставалось постоянным при любых условиях работы, даже при изменении тех или иных параметров (например, коэффициента трения).
Система управления и блок-схемы
При помощи этой диаграммы и блок-схемы можно достичь фундаментального системного понимания оперативных связей в системе. Пока система (механическая часть, периферийные устройства, аппаратура и т.д.) находится на стадии разработки, должна предоставляться возможность оказывать влияние на структурное проектирование системы с использованием общего мехатронного подхода. В качестве примера можно привести процесс заполнения жидкостью рабочего цилиндра гидропривода выключения сцепления. Система должна быть разработана таким образом, чтобы на основе поперечных сечений, объемов и уплотнений было обеспечено ее воспроизводимое поведение при как можно меньшем времени запаздывания.
Регулируемая система
Затем выполняется идентификация регулируемой системы. Это может быть сделано теоретически (посредством моделирования) или практически, например, путем измерения реакции на ступенчатое воздействие или определения частотной характеристики. Рекомендуется использовать оба метода и выполнить соответствующую коррекцию. Идентификация системы представляет собой всеобъемлющий процесс, зависящий от поставленной задачи. Иногда бывает достаточно определить только базовый тип и порядок регулируемой системы.
Разработка блока управления
Блок управления (контроллер) разрабатывается на основе результатов идентификации системы — это главная задача проектирования управляющего устройства. Сначала рекомендуется проработать его теоретически и с использованием методов моделирования. На этом этапе следует определить параметры блока управления. Когда этот этап будет в достаточной степени проработан, следует перейти к испытаниям на реальной регулируемой системе — на стенде или на автомобиле. Обычно в целях достижения дальнейшей оптимизации периодически выполняются рекурсивные шаги.
Критерии проектирования
В дополнение к этой фундаментальной последовательности действий следует учитывать следующие дополнительные критерии.
Цифровое (дискретное) управление
Большинство операций управления на автомобиле осуществляется с использованием микропроцессоров. В этом случае необходимо надлежащим образом определить время выборки, исходя из динамической характеристики системы. При этом необходимо обеспечить условия для того, чтобы все алгоритмы функций могли быть вычислены в течение времени, которое имеется между двумя выборками.
Нелинейность
Во многих случаях простых линейных методов, описанных выше, оказывается недостаточно, поскольку реальные регулируемые системы содержат нелинейные элементы (например, нелинейными являются характеристики регуляторов давления, сцепления и т.д.). В простых случаях, связанных со статическими, непрерывными нелинейностями, они могут быть скомпенсированы посредством дополнительного инвертирующего элемента передачи. В случаях операций регулирования с малыми амплитудами сигнала относительно рабочей точки уравнения, описывающие работу системы могут быть линеаризованы в области этой точки. В противном случае требуется применение более сложных процедур.
Структурные переключения
Многие операции управления с замкнутым контуром сначала инициируются сигналами в разомкнутом контуре управления (например, сначала следует заполнить привод сцепления гидравлической жидкостью, затем подать переключающее давление, затем запустить последовательность переключения передачи). В этом случае при переключении с управления с разомкнутым контуром на управление с замкнутым контуром необходимо обеспечить, чтобы это переключение происходило плавно, и запоминающие устройства (интеграторы элементов I) правильно инициализировались.
Робастность
Адаптивные блоки управления
Мотивация
Поведение регулируемых систем часто бывает непостоянным. Во многих случаях происходит изменение таких параметров, как постоянные времени и коэффициенты усиления. Может изменяться даже структура системы. Адаптивное регулирование позволяет привести процессы управления с замкнутым и разомкнутым контурами в соответствие с изменяющимся поведением системы. Примеры:
Допуски изготовления
Не все изделия из одной партии на 100% идентичны. Поскольку индивидуальная настройка сложна, система должна автоматически адаптироваться к различным параметрам (например, см. данные для регулировки автоматической трансмиссии).
Износ
Изменение параметров вследствие износа происходит на воспроизводимом (например, увеличение рабочего хода сцепления) или случайном (например, изменение коэффициента трения дисков) уровне. Адаптация позволяет компенсировать эти изменения (например, адаптация к изменениям рабочего хода для автоматических сцеплений).
Зависимость от третьей переменной (например, температуры)
Вязкость рабочих жидкостей сильно зависит от температуры. Поскольку эти колебания могут иметь краткосрочный характер (например, повторяться каждый день), они должны быть скомпенсированы (например, при управлении блокировочной муфтой гидротрансформатора).
Зависимость от рабочей точки
Нелинейные системы часто линеаризуются в области рабочей точки, а затем управление осуществляется линейным контроллером (поведение системы при малой амплитуде сигнала). Адаптация дает возможность учитывать различия в поведении системы в области рабочей точки (например, адаптация давления при чередующихся переключениях передач, производимых автоматической трансмиссией).
Различные требования к решению этих проблем на уровне регулирования с замкнутым контуром вызывают потребность в адаптивных системах, описание и определение которых приведено ниже.
Определение адаптивного управления
Поведение системы управления адаптируется к изменениям свойств регулируемой системы и ее сигналов. Процедура адаптации, как правило, разделяется на два этапа:
- Идентификация изменений поведения системы (параметров) во времени;
- Адаптация закона регулирования с замкнутым или разомкнутым контуром, как реакция на изменение поведения системы.
Адаптация системы управления без обратной связи
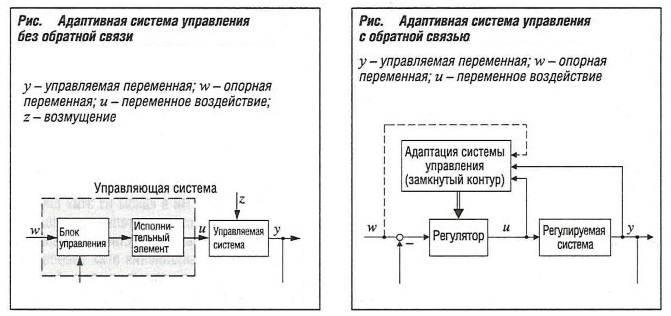
Адаптация системы управления с обратной связью
Как правило, первоначально рекомендуется выполнить адаптацию с разомкнутым контуром, т.е. для адаптации используются известные и метрологически регистрируемые взаимосвязи. Преимущества этой прямонаправленной структуры можно сравнить с преимуществами системы управления без обратной связи по сравнению с системой управления с обратной связью. Контур обратной связи, который может вызывать проблемы с устойчивостью системы, в первом случае отсутствует. На практике, в промышленном применении в основном используются адаптивные системы без обратной связи.
Замечания по проектированию
Перед тем как приступить к проектированию системы адаптивного регулирования, следует прояснить следующие вопросы:
Вы уже знакомы с некоторыми областями использования компьютеров. Знаете, что с помощью компьютера можно печатать книги, выполнять чертежи и рисунки; быстро передавать информацию на большие расстояния, создавать компьютерные справочники на любую тему; производить расчеты. Существует еще одно важное приложение компьютерной техники — использование компьютеров для управления.

Эта книга провозгласила рождение новой науки — кибернетики.
Не случайно время появления этого научного направления совпало с созданием первых ЭВМ.
Н. Винер предвидел, что использование ЭВМ для управления станет одним из важнейших их приложений, а для этого потребуется глубокий теоретический анализ самого процесса управления. Этому и посвящена наука кибернетика.
Что такое управление
Управление есть целенаправленное воздействие одних объектов, которые являются управляющими, на другие объекты — управляемые.
Простейшая ситуация — два объекта: один — управляющий, второй — управляемый. Например: человек и телевизор, хозяин и собака, светофор и автомобиль. В первом приближении взаимодействие между такими объектами можно описать схемой, изображенной на рисунке ниже:

В приведенных примерах управляющее воздействие производится в разных формах: человек нажимает кнопку или поворачивает ручку управления телевизором; хозяин голосом подает команду собаке; светофор разными цветами управляет движением автомобилей и пешеходов на перекрестке.
С кибернетической точки зрения все варианты управляющих воздействий следует рассматривать какуправляющую информацию, передаваемую в форме команд.
В данном выше определении сказано, что управление есть целенаправленный процесс, т. е. команды отдаются не случайным образом, а с вполне определенной целью. В простейшем случае цель может быть достигнута после выполнения одной команды. Для достижения более сложной цели бывает необходимо выполнить последовательность (серию) команд.
Последовательность команд по управлению объектом, выполнение которой приводит к достижению заранее поставленной цели, называется алгоритмом управления.
В таком случае объект управления можно назвать исполнителем управляющего алгоритма. Значит, в приведенных выше примерах телевизор, собака, автомобиль являются исполнителями управляющих алгоритмов, направленных на вполне конкретные цели (найти интересующую передачу, выполнить определенное задание хозяина, благополучно проехать перекресток).
С точки зрения кибернетики взаимодействие между управляющим и управляемым объектами рассматривается какинформационный процесс. С этой позиции оказалось, что самые разнообразные процессы управления в природе, технике, обществе происходят сходным образом, подчиняются одним и тем же принципам.
Вопросы и задания:
1. Кто был основателем кибернетики? В каком году вышла первая книга по кибернетике?
2. Что такое управление?
3. Что представляет собой управляющее воздействие с точки зрения кибернетики?
4. Что такое алгоритм управления?
5. Определите, кто играет роль управляющего и кто (или что) играет роль объекта управления в следующих системах: школа, класс, самолет, стая волков, стадо коров.
6. Для систем управления, выявленных в предыдущей задаче, назовите некоторые команды управления и скажите, в какой форме они отдаются.
Управление с обратной связью
КРАСНЫЙ — ЗЕЛЕНЫЙ — ЖЕЛТЫЙ — КРАСНЫЙ — ЗЕЛЕНЫЙ — ЖЕЛТЫЙ — КРАСНЫЙ и т. д.
Такой алгоритм называется линейным или последовательным.
Из этих примеров можно сделать вывод, что управление происходит эффективнее, если управляющий не только отдает команды, т. е. работает прямая связь, но и принимает информацию от объекта управления о его состоянии. Этот процесс называется обратной связью.
Обратная связь — это процесс передачи информации о состоянии объекта управления управляющему объекту.
Статьи к прочтению:
Системы управления с обратной связью
Похожие статьи:
Корень дерева уникален, это единственный узел в дереве, который не имеет родителя. Начав от корневого узла и следуя дочерним указателям, можно найти все…
5) обратная связь по выходу OFB 28. Режим хорошо подходит для шифрования ключей. 1)CBC 2)CFB 3)OFB ECB 29. Какими авторами была предложена первая версия…
§ 26. Управление с обратной связью
Основные темы параграфа:
♦ линейный алгоритм;
♦ обратная связь;
♦ модель управления с обратной связью;
♦ циклы и ветвления в алгоритмах;
♦ системы с программным управлением.
Линейный алгоритм
КРАСНЫЙ-ЗЕЛЕНЫЙ-ЖЕЛТЫЙ-КРАСНЫЙ-ЗЕЛЕНЫЙ-ЖЕЛТЫЙ-КРАСНЫЙ и т. д.
Такой алгоритм называется линейным или последовательным.
Обратная связь
Из этих примеров можно сделать вывод, что управление происходит эффективнее, если управляющий не только отдает команды, т. е. работает прямая связь, но и принимает информацию от объекта управления о его состоянии. Этот процесс называется обратной связью.
Обратная связь — это процесс передачи информации о состоянии объекта управления управляющему объекту.
Модель управления с обратной связью
Управлению с обратной связью соответствует схема, изображенная на рис. 5.3.
Циклы и ветвления в алгоритмах
Вот как можно записать алгоритм поиска нужной передачи по телевизору:
ВКЛЮЧИТЬ ТЕЛЕВИЗОР НА 1-М КАНАЛЕ
ПОКА НЕ БУДЕТ НАЙДЕНА ИСКОМАЯ ПЕРЕДАЧА,
ПОВТОРЯТЬ:
ПЕРЕКЛЮЧИТЬ ТЕЛЕВИЗОР НА СЛЕДУЮЩИЙ
КАНАЛ
В этом алгоритме содержится указание на повторение одних и тех же действий (переключить канал) по некоторому условию (пока не найдем передачу). Такой алгоритм называется циклическим.
Назовем пересекающиеся дороги: Дорога-1 и Дорога-2. Логика управления движением описывается следующим алгоритмом:
ЕСЛИ НА ДОРОГЕ-1 СКОПИЛОСЬ БОЛЬШЕ МАШИН
ТО ОТКРЫТЬ ДВИЖЕНИЕ ПО ДОРОГЕ-1
ИНАЧЕ ОТКРЫТЬ ДВИЖЕНИЕ ПО ДОРОГЕ-2
Здесь по определенному условию происходит выбор одного из двух действий. Такой алгоритм называется ветвящимся. Проверка выполнения условия и в первом и во втором примере стала возможна благодаря обратной связи: телезритель наблюдает за состоянием телевизора, милиционер наблюдает за состоянием движения на дорогах.
При наличии обратной связи алгоритм может быть более гибким, допускающим проверку условий, ветвления и циклы.
Системы с программным управлением
Принцип управления с обратной связью и есть основной закон, открытый кибернетической наукой. Он действует в системах самой разной природы: технических, биологических, социальных.
Системы, в которых роль управляющего объекта поручается компьютеру, называются автоматическими системами с программным управлением.
Для функционирования такой системы, во-первых, между компьютером и объектом управления должна быть обеспечена прямая и обратная связь, во-вторых, в память компьютера должна быть заложена программа управления (алгоритм, записанный на языке программирования). Поэтому такой способ управления называют программным управлением.
Программное управление широко используется в технических системах: автопилот в самолете, автоматическая линия на заводе, ускоритель элементарных частиц в физической лаборатории, атомный реактор на электростанции и пр.
Коротко о главном
Управляющая информация передается по линии прямой связи в виде команд управления; по линии обратной связи передается информация о состоянии объекта управления.
Без учета обратной связи алгоритм управления может быть только линейным, при наличии обратной связи алгоритм может иметь сложную структуру, содержащую ветвления и циклы.
Системы, в которых роль управляющего объекта выполняет компьютер, называются автоматическими системами с программным управлением.
Вопросы и задания
И. Семакин, Л. Залогова, С. Русаков, Л. Шестакова, Информатика, 9 класс
Отослано читателями из интернет-сайтов
Планы уроков информатики, скачать тесты бесплатно, всё для учителя и школьника в подготовке к уроку по информатике 9 класс, домашние задания, вопросы и ответы
Если у вас есть исправления или предложения к данному уроку, напишите нам.
Если вы хотите увидеть другие корректировки и пожелания к урокам, смотрите здесь - Образовательный форум.
Читайте также:
- Реферат нанотехнология в косметологии
- Методика оценки эффективности государственных программ и проектов реферат
- Отборочные испытания при устройстве на работу тестирование и собеседование реферат
- Соревнования в адаптивном спорте реферат
- Структура кодового обозначения объекта классификации по окун реферат