
Принципы построения сау реферат
Обновлено: 30.06.2024
Управление объектом с помощью технических средств без участия человека называется автоматическим управлением. Теория автоматического управления (ТАУ) это наука, которая изучает процессы управления и проектирования систем автоматического управления, работающих по замкнутому циклу с обратной связью. Совокупность объекта управления и средств автоматического управления называется системой автоматического управления (САУ). Основной задачей автоматического управления является поддержание определенного закона изменения одной или нескольких физических величин в объекте управления.
по принципу действия;
по характеру изменения выходной переменной;
по математическому описанию.
Классификация САУ по принципу действия
разомкнутые;
замкнутые;
комбинированные.
В замкнутых САУ управляющее воздействие формируется в непосредственной зависимости от управляемой переменной. Этот принцип управления называется управлением по отклонению ( ). Если на рисунке 1 разорвать штриховую линию, то получится система с управлением по отклонению.
Если одновременно используются оба принципа управления (по возмущению и отклонению), то такая система называется системой комбинированного принципа действия (комбинированной системой). Комбинированной является вся система на рисунке 1.
Классификация САУ по характеру изменения выходной переменной
системы стабилизации;
системы программного регулирования;
следящие системы.
Системой программного регулирования называется такая САУ, которая изменяет выходную переменную по заранее заданному закону .
Классификация САУ по математическому описанию
непрерывность или дискретность динамических процессов во времени;
линейность или нелинейность уравнений, описывающих динамику процессов в звеньях.
Ниже приведены статические характеристики непрерывных звеньев.

Рисунок 2 – П римеры статических характеристик непрерывных звеньев, где х , у – входной и выходной сигналы
Цифровой называется такая САУ, в которой имеется хотя бы одно звено, у которого при непрерывном входном сигнале выходной сигнал имеет вид последовательности импульсов. Такое звено называется импульсным (рисунок 3).
Линейной называется САУ, в которой в каждом звене выходные сигналы линейно связаны с входными сигналами.

Рисунок 3 – Импульсное звено, где х, у – входной и выходной сигналы
Нелинейной называется САУ, в которой имеется хотя бы одно звено с нелинейной зависимостью между входным и выходным сигналами.
Особым подклассом нелинейных систем являются релейные системы.
Релейной называется такая САУ, в которой хотя бы в одном звене при непрерывном изменении входной переменной выходная переменная в некоторых точках процесса, зависящих от значения входной переменной, изменяется скачком.
Теория автоматического управления (ТАУ) – наука о принципах построения, методах расчета и исследования автоматических систем.
ТАУ рассматривает класс систем, основой функционирования которых является процесс преобразования энергии (в отличие от информационных систем – преобразующих информацию).
Системой автоматического управления (САУ) называется совокупность управляемого объекта и устройства управления, взаимодействующих в соответствии с заданным законом (алгоритмом) управления.
Типовая, структурная схема сис-темы автоматического управления приведенана рис.
Управлением в технических системах называется преднамеренное воздействие на управляемый объект, обеспечивающее достижение поставленной цели.

2. Классификация САУ
Системы автоматического управления можно классифицировать по различным признакам:
1. По характеру изменения выходной величины:
– системы автоматического регулирования (САР, стабилизации) – системы, в которых выходная величина поддерживается на постоянном уровне, определенном заранее;
– следящие системы – это системы, в которых выходная величина изменяется в соответствии с заранее неизвестной функцией, определяемой заданием;
– программные системы – это системы, в которых выходная величина изменяется в соответствии с программой определяемой заданием;
– экстремальные системы – это системы, в которых выходная величина поддерживается на уровне некоторого экстремума;
– оптимальные системы – это системы, в которых выход таков, что некоторый показатель наилучший в определенном смысле.
2. По принципу управления:
– системы с управлением по отклонению – системы, в которых управляющее воздействие вырабатывается в функции разности задающего и возмущающего воздействия. Этот принцип используется в замкнутых системах управления. Структурная схема системы с управлением по отклонению приведена на рис. 2а.
– системы с управлением по возмущению – системы, в которых управляющее воздействие вырабатывается в функции задающего или возмущающего воздействия. Этот принцип управления чаще всего используется в разомкнутых системах. Структура системы с управлением по возмущению приведена на рис. 2б.
– системы скомбинированным управлением – системы, в которых сочетается первый и второй принципы управления. Структура системы с комбинированным управлением приведена на рис. 2в.

3. По характеру изменения сигналов: непрерывные; дискретные.
4. По числу регулируемых величин: одномерные; многомерные.
5. По виду ошибок: статические; астатические.
6. По характеру описываемых уравнений: линейные – нелинейные; детерминированные – стохастические; стационарные – нестационарные и т.д.
Основные вопросы, которые рассматривает теория автоматического управления:
Математические модели систем автоматического управления.
2. Определение устойчивости систем управления.
3. Анализ качества систем.
4. Коррекцию систем.
5. Задачи анализа и синтеза оптимальных систем.
3. Математические модели САУ
Для описания сигналов и систем, в зависимости от используемых методов исследования, применяются различные формы их представления во временной, частотной или операторной области. Взаимосвязь между областями осуществляется с помощью преобразований Фурье и Лапласа, как показано на рис. 3.

Преобразование Фурье. Соответствие между временным и частотным представлением сигнала можно выразить через преобразование Фурье:
и обратное преобразование Фурье:
Преобразование Лапласа. Соответствие между временным и операторным представлением сигнала можно выразить через преобразование Лапласа:
и обратное преобразование Лапласа:
где р = c+ jw – оператор Лапласа, c – область сходимости, x(t) – оригинал, а X(p) – изображение.
Для дискретных систем используют дискретные преобразования Лапласа и Фурье, а также ряд других преобразований (Z, W и др.).
Основные свойства (теоремы) преобразования Лапласа
2. Дифференцирование оригинала
При нулевых начальных условиях
3. Интегрирование оригинала
4. Теорема о свертке (умножения в комплексной области)
5. Теорема разложения.
то оригинал, в соответствии с теоремой Коши о вычетах может быть определен как сумма вычетов по полюсам подынтегральной функции
6. Теорема о предельных значениях функции.
Начальное значение функции:. (2.10)
Конечное значение функции: . (2.11)
7. Теорема запаздывания
4. Дифференциальные уравнения САУ
При математическом описании систем автоматического управления составляют уравнения статики и динамики.
Уравнения статики описывают установившиеся режимы и, как правило, являются алгебраическими.
Уравнения динамики описывают переходные процессы в системах автоматического управления и представляют собой дифференциальные, интегро-дифференциальные или разностные уравнения.
Уравнения динамики системы составляются на основе уравнений отдельных элементов, входящих в систему. Уравнения элементов записываются на основе физических законов, определяющих поведение данного элемента, чаще всего это законы сохранения энергии (Кирхгофа, Ньютона, и др.).
В качестве примера рассмотрим порядок составления уравнения динамики для RLC – четырехполюсника (рис. 4).
В соответствии сзаконом Кирхгофа можно записать уравнения
Выполнив преобразования, получим дифференциальное уравнение данной цепи.
Из условия равенства нулю производных, получим уравнение статики
Линеаризация дифференциальных уравнений
Обычно дифференциальные уравнения САУ являются нелинейными вследствие нелинейности характеристик элементов системы (порог чувствительности, ограничение по мощности, трение, люфт, зазор, гистерезис и др.). Решение нелинейных уравнений существенно сложнее, чем линейных. Поэтому всегда, если это возможно, необходимо преобразовать нелинейное уравнение к приближенному линейному, т.е. выполнить линеаризацию.
Линеаризация – замена нелинейного уравнения приближенным линейным. Линеаризация возможна при следующих условиях:
Если отклонения переменных Dx и Dy относительно установившихся значений x0 и y0 малы (рис. 5а). Это условие выполняется для широкого класса систем автоматического управления (например, для замкнутых систем).
2. Система не содержит существенно – нелинейных элементов, т.е. характеристики должны быть однозначными и не иметь разрывов 1-го или 2-го рода (рис. 5б-г).
Линеаризация осуществляется путем разложения нелинейной функции в ряд Тейлора в окрестности точки, соответствующей установившемуся режиму.
Выразим переменные x и y через их установившиеся значения x0 и y0 и отклонения Dx и Dy.
Разложение в ряд Тейлора имеет вид:
Вычтем уравнение установившегося режима, что соответствует переносу начала координат в точку (x0, y0), при этом получим линеаризованное уравнение:
Отличие линеаризованного уравнения от исходного нелинейного:
Линеаризованное уравнение линейное.
2. Линеаризованное уравнение приближенное.
3. Линеаризованное уравнение это уравнение в отклонениях (вариациях).
Автоматизированное проектирование систем автоматического управления. / Под ред. В.В. Солодовникова. – М.: Машиностроение, 1990. -332 с.
Гринченко А.Г. Теория автоматического управления: Учебн. пособие. – Харьков: ХГПУ, 2000. –272 с.
Зайцев Г.Ф. Теория автоматического управления и регулирования. – 2-е изд., перераб. и доп. Киев, Издательство Выща школа Головное издательство, 1989.
Справочник по теории автоматического управления. /Под ред. А.А. Красовского – М.: Наука, 1987. – 712 с.
Если Вам нужна помощь с академической работой (курсовая, контрольная, диплом, реферат и т.д.), обратитесь к нашим специалистам. Более 90000 специалистов готовы Вам помочь.
Поможем написать работу на аналогичную тему
Похожие рефераты:
МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ВЫПОЛНЕНИЮ ЗАДАНИЯ ПОЛУЧЕНИЕ УРАВНЕНИЯ ПЕРЕХОДНОГО ПРОЦЕССА ПО ПЕРЕДАТОЧНОЙ ФУНКЦИИ. ЦЕЛЬ. Научиться определять уравнение переходного процесса по из.
Решение нелинейных уравнений методом простых итераций и аналитическим, простым и модифицированным методом Ньютона. Программы на языке программирования Паскаль и С для вычислений по вариантам в порядке указанных методов. Изменение параметров задачи.
Дифференциальные уравнения как уравнения, в которых неизвестными являются функции одного или нескольких переменных, причем в уравнения входят не только сами функции, но и их производные. Решение операторным методом, с помощью рядов, методом Эйлера.
Методика и основные этапы построения ранжированных переменных, сферы и особенности их практического применения. Порядок построения графиков в декартовой системе. Приведение примеров решение нелинейных уравнений и их систем при помощи решающего блока.
Использование электрических сигналов в технических системах. Классификация сигналов: непрерывные и дискретные, детерминированные и случайные, периодические, каузальные, финитные, когерентные и ортогональные. Длительность, ширина, объем и база сигнала.
Порядок оценки точности системы автоматического управления по величине установившейся ошибки при типовых воздействиях, механизм ее повышения. Разновидности ошибок и методика их вычисления. Определение ошибок по виду частотных характеристик системы.
Решение дифференциального уравнения N-го порядка методом интегрирования при помощи характеристического уравнения, методом интегрирования и операторным методом для значений аргументов при заданных начальных условиях и нулевых уравнения 4–го порядка.
Порядок и методика моделирования входного сигнала, общие принципы представления сигналов математическими моделями. Взаимосвязь математических моделей с компьютерными, их место и значение на современном этапе. Пакеты для моделирования различных процессов.
Дискретизация непрерывных сигналов. Связь спектров дискретного и непрерывного сигналов. Преобразование Фурье и Лапласа для дискретных сигналов.
§1. ЧИСЛЕННОЕ РЕШЕНИЕ НЕЛИНЕЙНЫХ УРАВНЕНИЙ. 1п. Общий вид нелинейного уравнения F(x)=0 Нелинейные уравнения могут быть двух видов: Алгебраические
Решение линейных дифференциальных уравнений численными и символьными методами в рамках пакета компьютерной математики MathCAD. Сравнения результов решений и применение их при исследовании функционирования автоматических систем и электрических агрегатов.
Команды, используемые при решении обыкновенных дифференциальных уравнений в системе вычислений Maple. Произвольные константы решения дифференциального уравнения второго порядка, представленном рядом Тейлора. Значения опции method при численном решении.
Характеристика сигнала и его представление в виде математического ряда. Условия ортогональности двух базисных функций. Ряд Фурье, его интегральное преобразование и практическое использование в цифровой технике для обработки дискретной информации.
Теория автоматического управления - совокупность целесообразных действий, направленных на достижение поставленных целей. Объект управления - техническое устройство, в котором протекает управляемый процесс. Алгебраические критерии устойчивости Гурвица.
Появление дифференциальных уравнений при описании систем управления. Элементы теории дифференциальных уравнений. Определитель Вронского. Формула Лиувилля. Дифференциальные уравнения при описании непрерывных систем. Понятие пространства состояний.
ЧИСЛЕННОЕ . 1п. Общий вид нелинейного уравнения F(x)=0 Нелинейные уравнения могут быть двух видов: Алгебраические anxn + an-1xn-1 +… + a0 = 0 Трансцендентные- это уравнения в которых х является аргументом
Понятие и назначение статистической характеристики системы автоматического управления. Динамические характеристики системы в неустановившемся режиме, порядок их определения и вычисления методом разложения. Преимущества логарифмических характеристик.
Математический аппарат исследования САУ. Дифференциальные уравнения, описывающие движение системы являю тся уравнениями динамики. Дифференциальные уравнения САУ, ее элементы. Дифференциальные уравнения высокого порядка. Математическая модель системы.
Решение системы дифференциальных уравнений, заданной в нормальной форме Коши. Определение аналитических зависимостей изменения переменных состояния системы с использованием преобразования Лапласа. Численный метод решения системы c помощью Mathcad.
Практические навыки моделирования структурных схем в среде SIMULINK пакета MATLAB. Построение графиков функций в декартовой системе координат. Решение систем линейных и нелинейных уравнений. Работа с блоками Sum, Algebraic Constraint, Gain, Product.
Теория автоматического управления (ТАУ) – наука о принципах построения, методах расчета и исследования автоматических систем.
ТАУ рассматривает класс систем, основой функционирования которых является процесс преобразования энергии (в отличие от информационных систем – преобразующих информацию).
Системой автоматического управления (САУ) называется совокупность управляемого объекта и устройства управления, взаимодействующих в соответствии с заданным законом (алгоритмом) управления.
Типовая, структурная схема сис-темы автоматического управления приведенана рис.
Управлением в технических системах называется преднамеренное воздействие на управляемый объект, обеспечивающее достижение поставленной цели.

2. Классификация САУ Системы автоматического управления можно классифицировать по различным признакам:
1. По характеру изменения выходной величины:
– системы автоматического регулирования (САР, стабилизации) – системы, в которых выходная величина поддерживается на постоянном уровне, определенном заранее;
– следящие системы – это системы, в которых выходная величина изменяется в соответствии с заранее неизвестной функцией, определяемой заданием;
– программные системы – это системы, в которых выходная величина изменяется в соответствии с программой определяемой заданием;
– экстремальные системы – это системы, в которых выходная величина поддерживается на уровне некоторого экстремума;
– оптимальные системы – это системы, в которых выход таков, что некоторый показатель наилучший в определенном смысле.
2. По принципу управления:
– системы с управлением по отклонению – системы, в которых управляющее воздействие вырабатывается в функции разности задающего и возмущающего воздействия. Этот принцип используется в замкнутых системах управления. Структурная схема системы с управлением по отклонению приведена на рис. 2а.
– системы с управлением по возмущению – системы, в которых управляющее воздействие вырабатывается в функции задающего или возмущающего воздействия. Этот принцип управления чаще всего используется в разомкнутых системах. Структура системы с управлением по возмущению приведена на рис. 2б.
– системы скомбинированным управлением – системы, в которых сочетается первый и второй принципы управления. Структура системы с комбинированным управлением приведена на рис. 2в.
3. По характеру изменения сигналов: непрерывные; дискретные.
4. По числу регулируемых величин: одномерные; многомерные.
5. По виду ошибок: статические; астатические.
6. По характеру описываемых уравнений: линейные – нелинейные; детерминированные – стохастические; стационарные – нестационарные и т.д.
Основные вопросы, которые рассматривает теория автоматического управления:
Математические модели систем автоматического управления.
2. Определение устойчивости систем управления.
3. Анализ качества систем.
4. Коррекцию систем.
5. Задачи анализа и синтеза оптимальных систем.
3. Математические модели САУ
Для описания сигналов и систем, в зависимости от используемых методов исследования, применяются различные формы их представления во временной, частотной или операторной области. Взаимосвязь между областями осуществляется с помощью преобразований Фурье и Лапласа, как показано на рис. 3.

Преобразование Фурье. Соответствие между временным и частотным представлением сигнала можно выразить через преобразование Фурье:

(2.1)
и обратное преобразование Фурье:

(2.2)
Преобразование Лапласа. Соответствие между временным и операторным представлением сигнала можно выразить через преобразование Лапласа:

(2.3)
и обратное преобразование Лапласа:

(2.4)
где р = c+ jw – оператор Лапласа, c – область сходимости, x(t) – оригинал, а X(p) – изображение.
Для дискретных систем используют дискретные преобразования Лапласа и Фурье, а также ряд других преобразований (Z, W и др.).
Основные свойства (теоремы) преобразования Лапласа

(2.5)

2. Дифференцирование оригинала , (2.6)

,

где .
При нулевых начальных условиях

.
3. Интегрирование оригинала

. (2.7)
4. Теорема о свертке (умножения в комплексной области)

. (2.8)
5. Теорема разложения.
Если где
то оригинал, в соответствии с теоремой Коши о вычетах может быть определен как сумма вычетов по полюсам подынтегральной функции

(2.9)
6. Теорема о предельных значениях функции.

Начальное значение функции:. (2.10)

Конечное значение функции: . (2.11)
7. Теорема запаздывания

. (2.12)
4. Дифференциальные уравнения САУ
При математическом описании систем автоматического управления составляют уравнения статики и динамики.
Уравнения статики описывают установившиеся режимы и, как правило, являются алгебраическими.
Уравнения динамики описывают переходные процессы в системах автоматического управления и представляют собой дифференциальные, интегро-дифференциальные или разностные уравнения.
Уравнения динамики системы составляются на основе уравнений отдельных элементов, входящих в систему. Уравнения элементов записываются на основе физических законов, определяющих поведение данного элемента, чаще всего это законы сохранения энергии (Кирхгофа, Ньютона, и др.).
В качестве примера рассмотрим порядок составления уравнения динамики для RLC – четырехполюсника (рис. 4).

В соответствии сзаконом Кирхгофа можно записать уравнения

Выполнив преобразования, получим дифференциальное уравнение данной цепи.

Из условия равенства нулю производных, получим уравнение статики

Линеаризация дифференциальных уравнений
Обычно дифференциальные уравнения САУ являются нелинейными вследствие нелинейности характеристик элементов системы (порог чувствительности, ограничение по мощности, трение, люфт, зазор, гистерезис и др.). Решение нелинейных уравнений существенно сложнее, чем линейных. Поэтому всегда, если это возможно, необходимо преобразовать нелинейное уравнение к приближенному линейному, т.е. выполнить линеаризацию.
Линеаризация – замена нелинейного уравнения приближенным линейным. Линеаризация возможна при следующих условиях:
Если отклонения переменных Dx и Dy относительно установившихся значений x0 и y0 малы (рис. 5а). Это условие выполняется для широкого класса систем автоматического управления (например, для замкнутых систем).
2. Система не содержит существенно – нелинейных элементов, т.е. характеристики должны быть однозначными и не иметь разрывов 1-го или 2-го рода (рис. 5б-г).

Линеаризация осуществляется путем разложения нелинейной функции в ряд Тейлора в окрестности точки, соответствующей установившемуся режиму.
Выразим переменные x и y через их установившиеся значения x0 и y0 и отклонения Dx и Dy.

(3.1)
Разложение в ряд Тейлора имеет вид:

(3.2)
Вычтем уравнение установившегося режима, что соответствует переносу начала координат в точку (x0, y0), при этом получим линеаризованное уравнение:

(3.3)
Отличие линеаризованного уравнения от исходного нелинейного:
Линеаризованное уравнение линейное.
2. Линеаризованное уравнение приближенное.
3. Линеаризованное уравнение это уравнение в отклонениях (вариациях).
1. Автоматизированное проектирование систем автоматического управления. / Под ред. В.В. Солодовникова. – М.: Машиностроение, 1990. -332 с.
3. Гринченко А.Г. Теория автоматического управления: Учебн. пособие. – Харьков: ХГПУ, 2000. –272 с.
4. Зайцев Г.Ф. Теория автоматического управления и регулирования. – 2-е изд., перераб. и доп. Киев, Издательство Выща школа Головное издательство, 1989.
5. Справочник по теории автоматического управления. /Под ред. А.А. Красовского – М.: Наука, 1987. – 712 с.
Раздел: Информатика, программирование
Количество знаков с пробелами: 7962
Количество таблиц: 0
Количество изображений: 7
Принципы действия систем автоматического управления
При проектировании САУ решают, как наиболее простым и технико-обоснованным способом получить и передать необходимый объем информации. Для этого исследуют принципы построения систем. Основными принципами построения систем являются:
1. Принцип разомкнутого управления.
Данный принцип заключается в том, что алгоритм управления строится только на основе алгоритма функционирования путем предварительного выбора законов, определяющее действие управляемого устройства или регулятора с учетом свойств управляемого объекта. Алгоритм функционирования может задаваться отдельным устройством (ЗАФ) или может быть заложен в конструкцию управляющего устройства или регулятора.
Примером данного принципа может служить пример разомкнутого цикла управления.
2. Принцип управления по отклонению.
Этот принцип также именуется принципом Уатта-Ползунова. Рассматриваемый принцип управления основан на том, что управляющее воздействие в автоматическом устройстве управления или регуляторе вырабатывается с учетом информации об отклонении.
Управление величины от заданного значения. Чтобы реализовать этот принцип, в автоматическом устройстве управления или в автоматическом регуляторе должно происходить сравнение действительного значения y(t) с заданным или предписанным x(t), и в зависимости от результатов полученного сравнения, формируется управляющее воздействие. Примером реализации данного принципа может служить пример замкнутого цикла функционирования.
3. Принцип управления по возмущению (принцип компенсации возмущения).
Рассматриваемый принцип основан на том, что управляющее воздействие в САУ выбираются в зависимости от результатов измерения возмущающего воздействия, оказывающего влияние на ОУ. Функциональная схема управления такой САУ имеет вид:
Пример реализации принципа компенсации возмущения (управления по нагрузке):
Напряжение на выходе генератора UГ – пропорционально суммарному магнитному потоку. Увеличение или уменьшение тока нагрузки зависит от сопротивления нагрузки. Такое изменение тока нагрузки не окажет никакого влияния на выходное напряжение генератора, т.к. ток нагрузки пропорционален магнитному потоку Ф2 и компенсирует изменение Ф1, т.е. значение суммарного потока постоянно при любых колебаниях нагрузки. Такой принцип носит название принципа управления по нагрузки.
4. Принцип комбинированного управления.
Данный принцип реализуется путем совмещения двух принципов:
1. Принцип управления по отклонению.
2. Принцип управления по возмущению.
Совмещение этих двух принципов дает возможность улучшить качество управления, т.е. предписанное значение регулируемой величины будет более точно с меньшей погрешностью воспроизводиться на выходе системы.
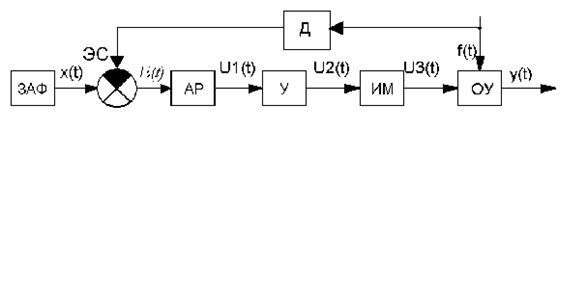
§1.8. Основные элементы автоматики.
Любая САУ состоит из отдельно связанных между собой элементов.
Элементом автоматики называют часть системы, в которой происходит качественные или количественные преобразования физической величины, а также передача преобразованного воздействия от предыдущего элемента к последующему. Каждый такой элемент выполняет определенные функции, которые для него определяют технологический процесс или функционирование самой системы. Таких элементов в автоматике достаточно много. Рассмотрим основную группу этих элементов.
1. Датчики автоматики – это устройства, которые измеряют управляемые или регулируемые величины объектов управления и преобразовывают измеренные величины одной физической природы в другую (термосопротивления, термопары, переменные конденсаторы, фотоэлемент, тензодатчик и т.д.)
2. Элементы сравнения – они сопоставляют задающее воздействие x(t) и управляемую величину y(t). Получаемая на выходе таких элементов разность e(t)=x(t)-y(t) передается по цепи воздействия, либо непосредственно на исполнительный механизм. Элементы сравнения, как самостоятельная часть системы не применяется, а является составной частью других устройств, например, автоматических регуляторов (эл. мостовые схемы сравнения, потенциометры, пружинные элементы и др.)
3. Усилители – они в системах автоматики обычно используются для усиления задающего воздействия x(t) или разности e(t), когда мощности самих сигналов недостаточно для работы регуляторов (электронные, ионные, магнитные, электромагнитные усилители, редуктор, гидравлические усилители).
4. Исполнительные механизмы – они предназначены для измерения управляемых величин, или поддержания их в заданных пределах. Они предназначены для выработки более мощного воздействия на ОУ, нежели выходной сигнал регулятора (эл. двигатели – серводвигатели; соленоиды; гидро- и пневмодвигатели и т.д.).
5. Задающие элементы (элементы настройки). Они представляют собой устройства, при помощи которых в САУ подается задающее воздействие x(t) (потенциометры, вращающиеся трансформаторы и т.д.).
6. Корректирующие элементы – они предназначаются для улучшения регулировочных свойств системы в целом, или отдельных ее частей (дифференцирующие и интегрирующие цепи, нелинейные элементы и т.д.).
7. Командоаппараты – они предназначены для подачи в систему различных воздействий и команд (кнопки, выключатели, конечные выключатели и т.д.).
8. Элементы защиты – они предназначены для выполнения защитных функций, при недопустимых режимах работы (токовые реле, электротепловые реле, автоматические выключатели, предохранители и т.д.).
9. Контрольно-измерительные приборы – устройства для измерения и контроля различных величин и параметров (показывающие, самопишущие и т.д.).
Также к элементам автоматики относят автоматические регуляторы, объекты управления, сигнальная аппаратура.
Все элементы автоматики обычно указывают на функциональных и структурных схемах, внутри которых указывается либо назначение прибора, либо его передаточная функция и обязательно показывается действующие на элемент входные и выходные воздействия.

Содержание
1 Алгоритмы работы систем автоматического управления
1.1 Поиск экстремума показателя качества
1.2 Принцип оптимального управления
1.3 Принцип адаптации
2 Классификация систем автоматического управления
2.1 Системы автоматической стабилизации, программного регулирования и следящие системы
2.2 Системы статического и астатического регулирования
2.3 Системы непрерывного, импульсного и релейного действия
2.4 Системы регулирования по возмущению и системы комбинированного регулирования
2.5 Самонастраивающиеся системы
3 Автопилоты
Воробьева Н.И. Основы автоматизации технологических процессов в мясной и молочной промышленности
- формат pdf
- размер 25.58 МБ
- добавлен 04 февраля 2011 г.
М: Легкая и пищевая пром-сть. 1983. - 328 с. В книге рассматриваются элементы теории автоматического регулирования, принципы построения систем автоматического контроля, регулирования и управления технологическими процессами. Большое внимание уделено рассмотрению принципов действия и конструкций первичных преобразователей приборов, приведены типы и марки средств контроля технологяческих параметров и технических средств автоматизации. Рассмотрены к.
Воробьева Н.И. Основы автоматизации технологических процессов в мясной и молочной промышленности
- формат djvu
- размер 3.83 МБ
- добавлен 15 января 2011 г.
1983. В книге рассматриваются элементы теории автоматического регулирования, принципы построения систем автоматического контроля, регулирования и управления технологическими процессами. Большое внимание уделено рассмотрению принципов действия и конструкций первичных преобразователей приборов, приведены типы и марки средств контроля технологяческих параметров и технических средств автоматизации. Рассмотрены конкретные схемы автоматизации отдельных.
Донской Н.В. и др. Управляемый выпрямитель в системах автоматического управления
- формат djvu
- размер 6.54 МБ
- добавлен 27 декабря 2010 г.
Донской Н. В., Иванов А. Г., Никитин В. М., Поздеев А. Д. Управляемый выпрямитель в системах автоматического управления / под ред. А. Д. Поздеева. – М.: Энергоатомиздат, 1984. – 352 с. Дается описание свойств управляемого выпрямителя как элемента системы автоматического управления с учетом присущей ему специфики. Рассматривается поведение нереверсивных и реверсивных выпрямителей при малых и больших возмущениях в режимах непрерывного и прерывисто.
Кривозубов В.Н., Малючик Ю.Е., Савичев С.С, Федоров А.П. Основы автоматики
- формат djvu
- размер 648.82 КБ
- добавлен 17 января 2011 г.
Учебное пособие. 2003 г. В учебном пособии дано описание 5 лабораторных работ. Они посвящены изучению элементов автоматики, систем логико-командного управления, автоматического регулирования и контроля.
Лекции по автоматике
- формат rtf
- размер 1.05 МБ
- добавлен 16 ноября 2009 г.
Курганский технологический колледж (КТК) Основы теории управления и математическое описание динамических звеньев и систем. Устойчивость САУ. Анализ качества САУ в статике. Анализ качества САУ в динамике. Синтез систем автоматического управления.
Мартыненко И.И., Головинский Б.Л. и др . Автоматика и автоматизация производственных процессов
- формат djvu
- размер 4.6 МБ
- добавлен 17 января 2011 г.
1985 г. Мартыненко И. И., Головинский Б. Л., Проценко Р. Д., Резниченко Т. Ф. В пособии изложены основы автоматического управления, сведения о современных технических средствах автоматизации и методах анализа линейных непрерывных систем автоматического регулирования при детерминированных воздействиях Рассмотрены вопросы автоматизации мобильных и стационарных сельскохозяйственных процессов. Для студентов по специальности: «Механизация сельского хо.
Мартыненко И.И., Головинский Б.Л. и др . Автоматика и автоматизация производственных процессов
- формат pdf
- размер 25.44 МБ
- добавлен 04 февраля 2011 г.
М: Агропромиздат, 1985 г. - 335 с. Мартыненко И. И., Головинский Б. Л., Проценко Р. Д., Резниченко Т. Ф. В пособии изложены основы автоматического управления, сведения о современных технических средствах автоматизации и методах анализа линейных непрерывных систем автоматического регулирования при детерминированных воздействиях Рассмотрены вопросы автоматизации мобильных и стационарных сельскохозяйственных процессов. Для студентов по специальности.
Цыпкин Я.З Основы теории автоматических систем
- формат pdf
- размер 19.9 МБ
- добавлен 19 сентября 2010 г.
М.: Наука, 1977. 560 с. Книга представляет собой курс лекций по теории автоматических систем. Она состоит из трех частей: основных сведений об автоматическом управлении, теории непрерывных автоматических систем и теории дискретных автоматических систем. В книге излагаются основные идеи автоматического управления, а также закономерности, свойства, особенности и предельные возможности автоматических систем. Большинство глав сопровождается задачам.
Шпоры по автоматизации
- формат doc
- размер 4.07 МБ
- добавлен 28 сентября 2008 г.
Автоматическое и автоматизированное управление технологическими процессами горных предприятии. Системы автоматическогоуправления. Назначение, режимы работы и схемы включения программируемого параллельного интерфейса. Основные функции и алгоритмы работы систем автоматического управления проходческими комбайнами. Структура и функциональное назначение основных блоков микропроцессора. Принципы объединения микроконтроллеров в распределенные сети для у.
Щипанов К.А. и др. Моделирование и анализ систем автоматического управления в MATLAB
- формат doc
- размер 791.5 КБ
- добавлен 02 февраля 2011 г.
УрФУ, 2010 кафедра ТИМ Методические указания содержат основные теоретические сведения и примеры использования математического пакета MATLAB для решения задач автоматического управления. Примеры лабораторных работ. 1. Основные понятия теории автоматического управления 2. Использование математического пакета MatLab для решения задач автоматического управления 2.1 Общие сведения о пакете MatLab 2.2 Библиотека функций Control System ToolBox. Работа.
Читайте также: