
Принцип работы авиагоризонта реферат
Обновлено: 04.07.2024
Гировертикали (к ним относятся и авиагоризонты), как отмечалось ранее, используются в качестве датчиков углов крена и тангажа летательных аппаратов. При этом ось ротора гироскопа гировертикали располагается по направлению местной вертикали Земли. В качестве измерительного устройства,
корректирующего кажущийся уход гировертикали, применяется жидкостный маятник, который работает следующим образом. Внизу внутренней рамы гировертикали закрепляется медный сосуд 6 (рис. 180). В изоляционном основании 5 сосуда по окружности впрессованы четыре электрода (1, 2, 3, 4). Корпус сосуда является пятым электродом. Сосуд заполнен токопроводящей жидкостью так, что в ней имеется пузырек воздуха. Когда ось ротора вертикальна, то пузырек находится посредине сосуда и поровну перекрывает площадь контактов 1, 2, 3, 4. При этом электрические сопротивления между каждым из четырех контактов и сосудом одинаковы.
К диаметрально расположенным электродам 1 и 3 подключены управляющие обмотки W’ и W" коррекционного двигателя, установленного на оси одной из рам гироскопа (например, внутренней); к контактам 2 и 4 подключены управляющие обмотки другого коррекционного двигателя, расположенного на оси рамы (внешней).
Обмотки W и W" (как и управляющие обмотки другого коррекционного двигателя) включены так, что их магнитные потоки направлены встречно. В рассмотренном выше случае, когда пузырек воздуха поровну перекрывает площади контактов сосуда 6, суммарные магнитные потоки управляемых обмоток соответственно первого и второго двигателей равны нулю и, следовательно, их коррекционные моменты также равны нулю.
При отклонении оси ротора от вертикали пузырек воздуха перемещается (например, на угол у) и электрические сопротивления между корпусом сосуда и противоположными электродами станут различными. Это вызовет в конечном итоге появление коррекционного момента, под действием которого гироскоп прецессирует к вертикали. Величина коррекционного момента выбирается такой, чтобы скорость прецессии гироскопа была больше максимально возможной скорости ухода его от положения вертикали.
Однако при полете с ускорением (например, при выполнении виража) маятник коррекции располагается по направлению равнодействующей внешних сил и тем самым вызывает прецессию гироскопа в направлении так называемой кажущейся вертикали. Величина скорости этой прецессии будет тем больше, чем больше величина коррекционного момента. Поэтому для уменьшения возникающей в этом случае ошибки в положении гироскопа небходи — мо либо отключать коррекцию, либо ограничивать величину максимального значения коррекционного момента. Обычно величина
скорости прецессии под действием коррекции лежит в пределах 1—6 град/мин.
Чтобы не допустить погрешности в указании вертикали при полете с ускорением, например при развороте самолета, цепи обмоток управления электродвигателей поперечной коррекции разрываются контактами выключателя коррекции при определенной величине угловой скорости разворота. Аналогично для этих целей при линейных ускорениях летательного аппарата в цепь обмоток управления электродвигателя продольной коррекции также ставится выключатель.
В зависимости от типа летательного аппарата предусматривают определенное расположение осей гироузла гировертикали (авиагоризонта). Это вытекает из следующего. Пусть гнроузел установлен так, (рис. 181, а), что ось внутренней рамы параллельна поперечной оси z самолета, а ось внешней рамы параллельна продольной х оси самолета. Тогда ось внутренней рамы является осью измерения углов тангажа, а ось внешней рамы — углов крена. При этом углы крена могут изменяться в пределах 0ч-360°. Если же угол тангажа станет близким к 90°, то ось гироскопа совпадает с осью внешней рамы. Гироскоп в таком случае неустойчив, так как он потерял одну степень свободы. Отсюда использование авиагоризонта с таким расположением осей гироузла ограничено по углам тангажа, а следовательно, он может быть применен для ■самолетов, угол тангажа которых гораздо менее 90°.
Такие авиагоризонты устанавливаются на самолетах гражданской авиации.
На рис. 181, б показано другое расположение гироузла. Здесь ось внешней рамы параллельна поперечной оси z самолета, а ось внутренней рамы параллельна продольной х оси самолета. Как следует из рис. 181, б при крене 90° ось г внешней рамы ■совместится с осью ротора и гироскоп снова теряет степень ■свободы.
Таким образом, при любой из приведенных схем расположения гироузла не может быть обеспечена устойчивость гироскопа на больших углах крена и тангажа. Для высокоманевренных самолетов применяют схему гироузла со следящей рамой, например, в авиагоризонте АГД-1 (рис. 182). Ось внешней рамы 2 крепится не 182
в подшипниках корпуса прибора, а в подшипниках дополнительной рамы 3.
Скорость отработки следящей рамы 3 выбирается больше максимально возможной угловой скорости вращения самолета вокруг продольной оси.
На оси внутренней рамы закреплена сферическая шкала. Нижняя полусфера картушки окрашена в коричневый цвет, верхняя в голубой. На шкале нанесены линия горизонта и параллельные ей линии, которые служат для отсчета углов тангажа. За стеклом также расположен силуэт самолета, связанный с корпусом прибора. Взаимное расположение картушки и силуэта дает величины углов крена и тангажа.
Коррекционные двигатели 6 и 5 осуществляют привод оси ротора гироскопа к направлению гировертикали. Ротор гироскопа с помощью короткозамкнутого трехфазного электродвигателя вращается со скоростью до 21—22 тыс. об/мин. Электродвигатель устанавливается внутри ротора. Коррекционное устройство данного авиагоризонта включает жидкостный маятник и моментные электродвигатели 6 и 5. На лицевой стороне авиагоризонта имеются кнопки включения арретира, ручки кремальеры для перемещения силуэта самолета и указатель скольжения. Арретирование осуществляется перед включением авиагоризонта для установки осей гироузла параллельно соответствующим осям летательного аппарата, что обеспечивает быструю готовность гировертикали к действию.
Дистанционные авиагоризонты (АГД) ввиду ряда существенных преимуществ по сравнению с недистапционными в настоящее время находят самое широкое применение на самолетах и вертолетах ГА.
Электрокинематическая схема АГД-1 приведена на рис. 183, комплект АГД состоит из гировертикали и одного или двух указателей горизонта.
Основными частями гировертикали являются гнроузел, система следящей рамы, система коррекции гировертикали, система запуска. Оси гироузла со следящей рамой расположены относительно осей самолета так, как показано на рис. 183 (х и z — продольная и поперечная оси самолета).
Указатель имеет элементы следящих систем указателей крена и тангажа. Связь указателей с гировертикалью осуществляется с помощью дистанционной электрической передачи.
Авиагоризонт АГД работает следующим образом. При появлении крена внешняя рама 5 вместе со следящей рамой 3 поворачивается вслед за самолетом (вертолетом). При этом индукционный датчик 11, расположенный на внешней раме, повернется относительно неподвижного якоря датчика, установленного на оси внутренней рамы 10. С выхода индукционного датчика снимается сигнал (его величина и фаза определяется знаком и величиной угла крена), который после прохождения через контакты коммутатора 23 и усиления в усилителе У поступает на электродвигатель —
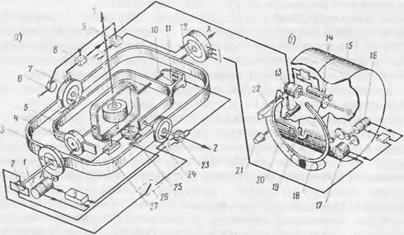
Рис. 183. Электрокинематическая схема АГД-1: а —гиродатчик; б — указатель:
1. 14, 16 — двигатели-генераторы; 2, 6, 23 — коммутаторы; 3 — следящая рама: 4. 24 — коррекционные электродвигатели; 5 — внешняя рама; 7, 12 — сельсин-датчики.
S, 9— реле; 10 — внутренняя рама; 11 — индукционный датчик; 13, 17 — сельсин-приемники >казателей; 15 — картушка со шкалой; 18— шестерня; 19, 22— индексы;
20 — шкала на корпусе; 21 — кремальера; 25 — жидкостный маятник; 26 — контакты выключатели коррекции; 27 — жидкостный выключатель
генератор 1. Электродвигатель Д поворачивает следящую раму н сторону увеличения угла между осями у и г до величины. Для
улучшения качества переходного процесса следящей системы от генератора Г к усилителю подводится сигнал скоростной обратной связи.
Авиагоризонт АГД-1 устанавливают и на легких самолетах, которые могут выполнять фигуры высшего пилотажа. При выполнении петли самолет некоторое время находится в перевернутом по* ложенни. При этом следящая рама 3 вместе с двигателем-генератором 1 поворачивается относительно оси внешней рамы на 180° так, что двигатель-генератор / находится впереди гироузла. Если в этом случае возникает левый крен самолета, то его левая плоскость, левая сторона следящей рамы и ось внешней рамы двигаются вверх (относительно плоскости горизонта), а магнитопровод датчика 11 — вниз. При этом электродвигатель 1 будет вращаться против часовой стрелки, что приводит к увеличению угла отклонения внешней рамы от нормали к оси ротора, т. е. к потере устойчивости гироскопа.
Для устранения этого ненормального явления служит коммутатор 23, установленный на оси внешней рамы. Он переключает фазу сигнала индукционного датчика на противоположную в момент перехода самолета через угол тангажа, равный 90°.
Коррекция гировертикали осуществляется с помощью жидкостного маятника 25 и коррекционных электродвигателей 4 и 24. В цепь электродвигателя 24 поперечной коррекции включены контакты 26 выключателя коррекции и контакты 2 диска, закрепленного на оси рамы 3. При разворотах летательного аппарата, продолжающихся более 74-10 сек с угловой скоростью более 0,1— 3 град/сек, контакты 26 размыкаются, выключая поперечную коррекцию. Контакты коммутатора 2 выключают эту коррекцию при достижении угла крена определенной величины.
Если продольное ускорение летательного аппарата достигает значения более 1,67 м/сек2, то жидкостный выключатель 27 отключает электродвигатель 4 продольной коррекции. В отличие от маятника 25 этот выключатель имеет всего два контакта. Цепь контактов размыкается воздушным пузырьком при продольных ускорениях.
Сигнал тангажа выдается сельсином-датчиком 7 на сельсин — приемник 13 указателя. С сельсин-приемника сигнал после усиления усилителем У поступает на двигатель-генератор 14, который через редуктор перемещает картушку 15 со шкалой тангажа указателя.
Сигнал крена выдается сельсином-датчиком 12 на сельсин-приемник 17 указателя, а затем после усиления в усилителе У поступает на двигатель-генератор 16. Последний через редуктор вращает шестерню 18 указателя крена.
Отсчет углов тангажа производится по шкале картушки и по индексу 19, а углов крена — по шкале 20, которая расположена на корпусе прибора и по концу силуэта самолета, закрепленного на шестерне 18.
Кремальерой 21 осуществляется совмещение линии горизонта картушки с нулевой отметкой на шкале 20 указателя, если в горизонтальном полете произошло изменение угла атаки. При повороте кремальеры 21 поворачиваются статор сельсина-приемника 13 тангажа и индекс 22. Индекс 22 укажет при этом по шкале 20 указателя значение угла атаки самолета.
Применяемые в АГД полупроводниковые усилители — однотипны. Два из них расположены в корпусе указателя, а один — в корпусе гироагрегата.
На оси 2 внешней рамы гироузла расположен второй коммутатор 6. Он работает следующим образом. Когда угол тангажа становится равным 90°, коммутатор подает питание на реле 8 и 9, которые переключают порядок чередования фаз сельсинов-приемников тангажа и крена. В результате этого с выхода сельсин-приемника 12 крена появляется сигнал противоположного знака и электродвигатель 16 быстро повернет шестерню 18 с указателем крена на угол 180°, устанавливая силуэт самолета в перевернутое положение.
Для того чтобы не произошло аналогичного перемещения шкалы 15 тангажа, одновременно с переключением фаз обмотки статора сельсина-приемника 13 тангажа переключаются и фазы обмотки его ротора. Вследствие этого при увеличении углов тангажа более 90° шкала тангажа будет двигаться в обратном направлении к линии горизонта.
В АГД благодаря электрической связи системы индикации с гироскопом индикация углов тангажа получается естественной, т. е. так как окраска верхней части шкалы тангажа голубая, а нижней — коричневая, то летчик видит на авиагоризонте взаимное расположение летательного аппарата, Земли и неба таким, каким оно существует в действительности.
Кроме того, в АГД гироагрегат располагается не на приборной доске, а вблизи центра масс самолета, обеспечивает устойчивость гировертикали и высокую точность выдаваемых сигналов. В связи с этим авиагоризонт АГД используется как датчик углов крена и тангажа для различных автоматических систем (курсовых систем, автопилота и др.).
Все летательные аппараты в настоящее время имеют комплекс необходимого приборного оборудования, обеспечивающего экипажу выполнение полета, контроль за работой силовых установок и других систем. Приборы позволяют летчику производить контроль взлета и посадки, снижения и набора высоты, различных эволюций при выполнении полета. Даже самые первые самолеты имели на борту указатели скорости, высотомеры и компасы. Без приборов фактически невозможен полет любого летательного аппарата.
Авиационные приборы, устанавливаемые на борту самолета, классифицируются по назначению и принципу действия.
В зависимости от назначения они подразделяются на следующие группы:
пилотажно-навигационные (включая пилотажно-навигационные системы);
приборы контроля работы авиадвигателей; впомогательные приборы.
Первая группа приборов включает в себя указатели скорости, вариометры, авиагоризонты, компасы, указатели поворота и скольжения, автопилоты и др.
К приборам контроля работы двигателей относятся: тахометры, манометры, термометры, топливомеры, масломеры, расходомеры.
Вспомогательная группа приборов включает в себя те приборы, которые не вошли в основные группы (амперметры, вольтметры, манометры гидросистем, кабинные термометры и т. д.).
Указатель скорости предназначен для определения скорости полета и основан на принципе измерения скоростного напора воздушного потока. Действительно, зная величину скоростного напора
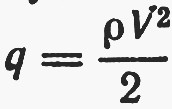
и плотность воздуха ρ, можно определить скорость самолета относительно воздуха. Схема указателя скорости показана на рис. 122.
Датчиком указателя скорости является приемник воздушных давлений (ПВД), устанавливаемый по направлению полета самолета. Приемник воздушных давлений имеет статическую камеру (С), сообщаемую с атмосферой через ряд отверстий, и камеру полного давления (П). Давление в статической камере всегда равно атмосферному. Благодаря осевому направлению отверстия в носке ПВД камера полного давления воспринимает не только атмосферное давление, но и скоростной напор. Полное давление будет зависеть от скорости движения самолетов относительно воздуха.
Давление из обеих камер через трубопроводы подается к указателю скорости, чувствительным элементом которого является манометрическая коробка. В герметичную внутреннюю полость корпуса указателя скорости подводится давление из статической камеры ПВД. В полость манометрической коробки поступает полное давление из камеры Я приемника воздушных давлений. Таким образом, манометрическая коробка оказывается под действием перепада полного и статического давлений, т. е. под действием скоростного напора.
Вследствие перепада давлений манометрическая коробка расширится и перемещение ее жесткого центра через передаточный механизм передается на стрелку прибора. Степень расширения манометрической коробки зависит от скорости полета.
При малых скоростях полета чувствительность манометрической коробки незначительная и, следовательно, перемещения жесткого центра небольшие. Для более точного определения воздушной скорости при полете на малых скоростях, что особенно важно при полете на критических и посадочных скоростях, в указателях скорости применяют трехмембранные манометрические коробки. Средняя и нижняя мембраны при этом составляют герметичную полость, сообщаемую с камерой полного давления, а через верхнюю мембрану свободно передается перемещение жесткого центра средней мембраны. Благодаря такому устройству на малых скоростях скоростной напор воспринимается средней и нижней мембранами. Вследствие малой жесткости средней мембраны перемещения жесткого центра будут большими даже при наличии незначительного скоростного напора. Поэтому деления шкалы указателя скорости выполняются редкими и позволяют с достаточной точностью определить воздушную скорость. С увеличением скорости полета средняя мембрана прижимается к верхней, в результате чего суммарная их жесткость возрастет, и скоростному напору необходимо преодолеть гораздо большее сопротивление.
При определении воздушной скорости по величине скоростного напора указатель скорости тарируется с учетом постоянной плотности воздуха. Однако плотность в большой мере зависит от температуры и давления (высоты полета). Следовательно, данному прибору всегда присущи погрешности, связанные с несовершенством методики замера скорости. Данные погрешности учитываются при подсчете истинной воздушной скорости на навигационной линейке.
На большинстве современных самолетов, помимо обычного указателя скорости, устанавливается указатель числа М (маметр) с контактным устройством системы световой сигнализации, замыкающим электрическую цепь в момент достижения самолетом скорости соответствующей установленному предельному значению числа М. Принцип действия прибора основан также на замере разности между полным и статическим давлением в полете.
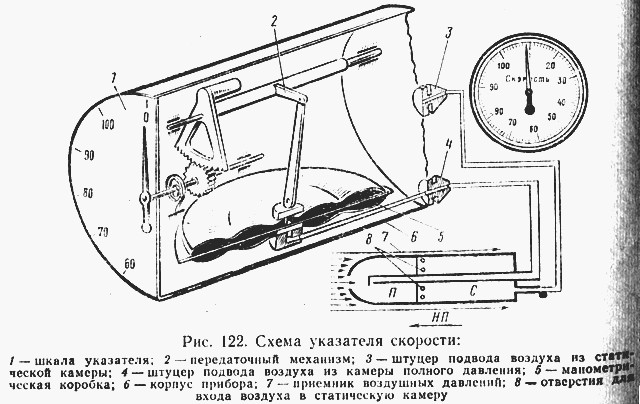
Вариометр (рис. 123) устанавливается на самолете для определения вертикальной скорости его движения, что позволяет пилоту строго выдерживать заданную высоту полета.
Измерение вертикальной скорости движения самолета вариометром основано на принципе замера перепада между атмосферным давлением и давлением внутри замкнутого объема корпуса прибора, сообщающегося с атмосферой через капилляр.
В качестве чувствительного элемента в вариометре используется манометрическая коробка, непосредственно сообщаемая с атмосферой. Такая связь с атмосферой чувствительного элемента и корпуса прибора при изменении атмосферного давления (высоты полета) приводит к тому, что внутри манометрической коробки давление меняется сразу, а в полости корпуса — постепенно. В peзультате этого образуется перепад между давлением внутри и вне мембранной коробки. Если, например, самолет будет идти с набором высоты (атмосферное давление будет понижаться), то в полости манометрической коробки давление сразу же уменьшится, а в полости корпуса прибора оно будет падать постепенно. Вследствие образовавшегося перепада давления манометрическая коробка сожмется и движение ее центра передастся передаточному механизму, который переместит стрелку указателя вверх, что будет свидетельствовать о подъеме самолета. Шкала указателя градуируется в метрах в секунду. При снижении самолета стрелка указателя отклоняется вниз, а в горизонтальном полете стрелка находится на нуле.
На лицевой части вариометра имеется юстировочный винт, с помощью которого стрелку прибора при случайном ее смещении можно всегда установить на нуль.
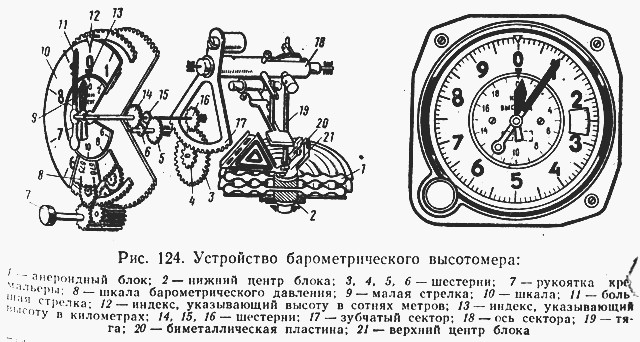
Барометрический высотомер служит для определения высоты полета самолета по величине абсолютного давления окружающего воздуха, изменяющегося с высотой.
Чувствительным элементом высотомера (рис. 124) являются анероидные коробки, жестко скрепленные друг с другом. С увеличением высоты полета окружающее атмосферное давление воздуха падает и анероидные коробки расширяются. Перемещение центра коробок при этом через передаточный механизм передается на стрелки, которые отклоняются, показывая увеличение высоты полета. Шкала прибора градуируется в метрах. Обычно высотомеры имеют две стрелки, одна из которых (большая) делает полный оборот при подъеме на каждые 1 000 м высоты, а другая (малая) — на каждые 10 000 м. Такое устройство позволяет более точно определять высоту полета.
В приборе предусматривается специальный компенсатор (биметаллический) температурных ошибок и пружинный противовес для компенсации возможных ошибок из-за действия инерционных сил. В связи с тем что фактическое состояние атмосферы на аэродроме может отличаться от расчетного (по международной стандартной атмосфере), высотомеры при стоянке самолетов в разное время будут показывать различную высоту. Для устранения сопутствующих этому явлению ошибок на лицевой стороне прибора имеется барометрическая шкала, связанная со стрелками и кремальерой. Поворотом кремальеры стрелки высотомера можно установить в нулевое положение.
Компасы, устанавливаемые на самолетах, служат для определения его курса. В качестве указателя курса широкое распространение получили магнитные компасы, использующие в своей основе явление земного магнетизма. Магнитным компасам всегда присущи ошибки, связанные, например, с инерционностью вращающихся масс, девиацией магнитной стрелки. Девиация, т. е. отклонение магнитной стрелки на некоторый угол от истинного направления магнитных силовых линий земли, является результатом воздействия на стрелку компаса посторонних магнитных полей. На самолете девиация вызывается стальными деталями самолета, электромагнитными полями генераторов, электрических приборов и т. д.
Для устранения девиации магнитную систему компаса обычно относят в такое место самолета, где посторонние магнитные поля незначительны. Такие компасы получили название дистанционных.
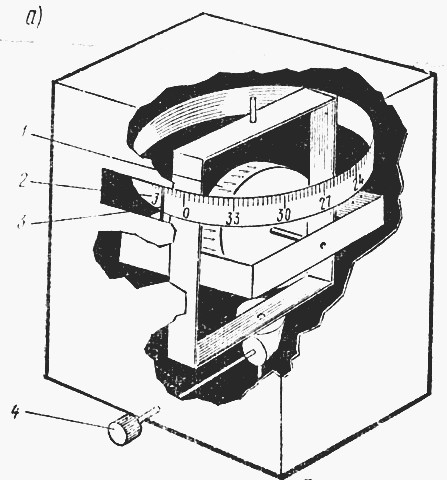
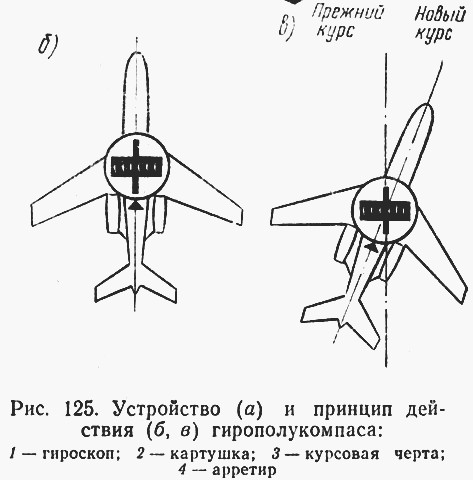
Однако указанные ошибки магнитных компасов делают их непригодными при разворотах самолета на заданный угол и для строгого выдерживания курса. В этом отношении наибольшую точность показаний имеют гирополукомпасы (рис. 125), использующие в своей работе свойство гироскопа с тремя степенями свободы сохранять неизменным положение оси ротора в пространстве. Для определения курса самолета к внешней рамке гироскопа, расположенного внутри корпуса прибора, крепится картушка с оцифровкой от 0 до 360°. Ось ротора гироскопа устанавливается параллельно продольной оси самолета (рис. 125, б). Если самолет повернется на некоторый угол, то точно на такой же угол повернется продольная ось самолета и корпус прибора с окошечком и курсовой чертой (рис. 125, в). Ось же ротора гироскопа благодаря своим свойствам сохранит прежнее направление. Картушка, прикрепленная к рамке гироскопа, также сохранит свое первоначальное положение. Следовательно, курсовая черта относительно картушки повернется на угол, равный углу поворота самолета, что и будет видно в смотровом окошечке гирополукомпаса. На лицевой стороне прибора имеется арретирующее устройство, позволяющее поворачивать весь гироскоп относительно вертикальной оси и тем самым согласовывать показания гирополукомпаса с магнитным компасом.
Авиагоризонт предназначен для определения положения самолета относительно плоскости горизонта.
Принцип работы авиагоризонта также основам на использовании свойства гироскопа с тремя степенями свободы сохранять неизменным положение оси ротора в пространстве. В авиагоризонте (рис. 126) в отличие от гирополукомпаса гироскоп устанавливается таким образом, что ось ротора при любых положениях самолета в пространстве остается вертикальной.
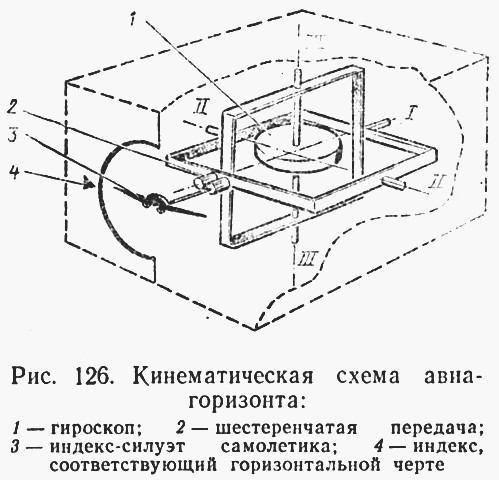
С внешней рамкой гироскопа через передачу из двух маленьких с одинаковым числом зубьев шестеренок связан индекс прибора (силуэт самолета). На смотровом окошечке лицевой стороны прибора нанесены горизонтальные черточки-индексы.
В горизонтальном полете силуэт самолетика находится на одной линии с горизонтальными индексами.
Если самолет начнет снижаться, то при этом корпус прибора повернется вокруг оси II—II гироскопа, который сохранит свое первоначальное положение. Горизонтальные индексы относительно силуэта самолетика сместятся вверх, и у пилота создастся иллюзия снижения самолета. При наборе высоты получается обратная картина.
При помощи авиагоризонта определяют и крен самолета. При крене на определенный угол наружная рамка гироскопа поворачивается вместе с корпусом прибора относительно оси I — I , оставаясь на одном уровне с горизонтальными индексами. Подвижная шестеренка, сидящая на одной оси с силуэтом самолетика, повернется относительно жестко закрепленной с внешней рамкой гироскопа шестеренки на угол, вдвое превышающий угол крена самолета, т. е. относительно горизонтальных индексов силуэт самолетика накренится на угол, равный поперечному крену самолета.
Указатель поворота (рис. 127) в своей работе использует свойство гироскопа с двумя степенями свободы, который в случае пово-
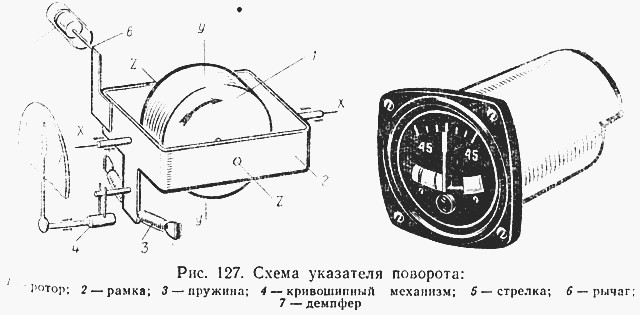
рота самолета с какой-то угловой скоростью стремится повернуться относительно оси вращения рамки X—X таким образом, чтобы вектор угловой скорости собственного вращения ротора был бы параллелен вектору угловой скорости самолета. Угол поворота фиксируется стрелкой, выведенной на лицевую часть прибора. По окончании разворота гироскопический момент будет равен нулю и стрелка под действием пружины возвратится в нейтральное положение. Для устранения колебаний стрелки при резких изменениях угловой скорости в приборе имеется демпфер (успокоитель).
Обычно указатель поворота совмещают в одном приборе с указателем скольжения (крена), состоящем из плавно изогнутой стеклянной трубки, заполненной толуолом, внутри которой свободно перемещается шарик из черного стекла. При правильном развороте шарик под действием центробежной силы и силы веса будет находиться в середине трубки. Смещение шарика от нейтрального положения будет свидетельствовать о том, что вираж происходит со скольжением.
Автопилот предназначен для облегчения пилотирования самолета. При включении автопилота пилот освобождается от физической нагрузки по управлению самолетом, но он не освобождается от необходимости наблюдать и анализировать показания пилотажных приборов.
Автопилот осуществляет стабилизацию самолета относительно вертикальной, продольной, поперечной осей и позволяет также производить спуск, подъем и вираж.
Автопилот состоит из чувствительных элементов, промежуточного механизма (усилитель), рулевых машин (исполнительные механизмы), источников питания, пульта управления.
Чувствительными элементами автопилотов являются гироскопические приборы, внешняя рамка которых или гировертикаль имеют связь с электрическими, пневматическими, гидравлическими или другими датчиками.
Стабилизация самолета по трем осям координат осуществляется курсовым и продольно-поперечным стабилизаторами. Первый выдает сигналы отклонения от заданного положения по курсу и сигналы координации крена в зависимости от отклонения по курсу, второй — сигналы отклонения от продольной и поперечной осей и сигналы координации в зависимости от крена по курсу и углу тангажа.
Промежуточный механизм (усилитель) служит для усиления сигналов отклонения от заданного положения по осям стабилизации и определения направления этих отклонений.
Рулевые машины являются исполнительными механизмами, которые перекладывают и удерживают рули в положениях, соответствующих величинам и направлениям сигналов, поступающих от усилителя. В качестве исполнительных механизмов в автопилотах применяются гидравлические, пневматические и электрические устройства.
Пульт управления состоит из органов управления автопилотом и сигнальных лампочек.
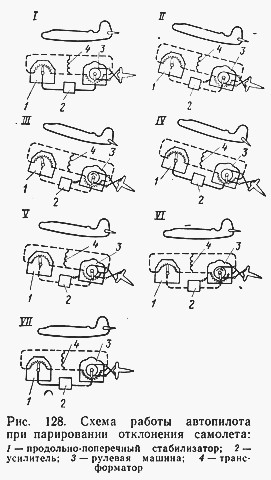
В прямолинейном горизонтальном полете щетки потенциометра продольно-поперечного стабилизатора (гировертикали) и рулевой машины руля высоты находятся в равнопотенциальных точках (положение I). В этом случае ток в цепи отсутствует и сигнал в усилитель не поступает. При отклонении самолета от заданного режима вследствие внешнего возмущения корпус гировертикали и связанный с ним потенциометр повернется вместе с самолетом. Щетка, связанная с осью карданного подвеса гироскопа, останется на месте, так как ось ротора гироско
па при отклонении самолета от первоначального режима сохраняет свое положение в пространстве. Потенциометр перемещается относительно щетки (положение II). Электрическое равенство цепи нарушается.
В результате этого в усилителе появляется сигнал определенного знака, что в свою очередь приводит к срабатыванию реле усилителя, посылающего сигнал в рулевую машину, отклоняющую руль для парирования действующего возмущения (положение III).
Руль отклоняется до тех пор, пока щетка тросового барабана Рулевой машины не дойдет до точки, имеющей равный потенциал с точкой на потенциометре гировертикали.
Отклоненный руль, противодействуя возмущающему моменту, начинает приводить самолет к исходному положению.
В некотором промежуточном положении щеток потенциометра гировертикали и потенциометра рулевой машины электрическая Цепь оказывается сбалансированной. Движение тросового барабана рулевой машины прекращается. Это происходит при вполне определенном соотношении между отклонением руля высоты и величиной сохранившегося еще возмущения (положение IV).
Под действием отклоненного руля самолет продолжает возвращаться в исходное положение, а вместе с ним и потенциометр гировертикали (положение V). Это вызывает новое нарушение балансировки электрической цепи моста и появление сигнала на усилителе и рулевой машине, но в обратном направлении. Результатом этого явится движение руля также к исходному положению, т. е. к нейтрали (положение VI).
Используемая литература: "Основы авиации" авторы: Г.А. Никитин, Е.А. Баканов
Авиагоризонты предназначены для измерения угла крена и угла тангажа самолета.
Угол крена γ – угол между поперечной осью самолета (плоскостью крыла) и плоскостью горизонта.
Угол тангажа υ – угол между продольной осью самолета и плоскостью горизонта.
Принцип действия авиагоризонта основан на использовании гироскопа с 3-мя степенями свободы, его свойстве удерживать свое положение неизменным в пространстве. В авиагоризонте главная ось гироскопа расположена по истинной вертикали и относительно нее определяется положение самолета.
1. Из-за перелета самолета из одной точки Земли в другую, где положение вертикали меняется, а гироскоп сохраняет прежнюю вертикаль.
2. Из-за суточного вращения Земли.
Реальный гироскоп имеет кроме того собственный уход, обусловленный небалансом и трением в подшипниках, установленных в осях карданного подвеса.
Поэтому гироскоп, установленный по вертикали, только в течение короткого времени обеспечивает точное измерение вертикали места, а следовательно, и углов крена и тангажа.
В авиагоризонте положение главной оси гироскопа корректируется с помощью маятника. Чаще всего используется жидкостная маятниковая коррекция, которая представляет собой две стеклянные трубки, заполненные токопроводящей жидкостью, имеющие пузырек воздуха и электрические контакты (см. рис. 30).
Принцип работы маятниковой коррекции заключается в следующем:
Жидкостный маятник установлен на внутренней раме гироскопа, и, если гироскоп установлен по вертикали, то пузырек воздуха будет находиться в центре.
Если гироскоп уходит от вертикали, то пузырек уходит на конец трубки и оголяет один из контактов. При этом прерывается электрическая цепь через проводящую жидкость. Это заставляет коррекционной двигатель создавать внешний момент, действующий на гироскоп, который в свою очередь вызывает прецессию гироскопа и возвращение его в вертикальное положение.
В некоторых авиагоризонтах используется двухкоординатный маятник, представляющий собой медную чашку с 4-мя контактами. Такой маятник можно рассматривать как два однокоординатных маятника, собранные в одном корпусе.
Рис. 30 Электрическая схема маятниковой коррекции
1 - воздушный пузырек; 2 - медная чаша; 3 - коррекционные двигатели; 4 - контакты; 5 - токопроводящая жидкость.
Во время разворота самолета и при линейных ускорениях жидкость смещается в маятнике под действием центробежной силы. В этом случае жидкостная коррекция стремится установить ось гироскопа по ложной вертикали. Чтобы это исключить, используют выключатель коррекции (ВК-53), который автоматически отключают цепи жидкостной маятниковой коррекции на время разворота при скорости разворота больше (0,1–0,3) градуса в секунду.
Выключатель коррекции – отдельный прибор, имеющий гироскоп с двумя степенями свободы. Во время разворота самолета гироскоп реагирует на угловую скорость, разворачивается и через временную задержку (6-10 с) отключает с помощью реле маятниковую коррекцию.
Краткие сведения. Гироскопом называется быстровращающееся тело, ось вращения которого имеет возможность изменять свое направление в пространстве. Если ась ротора поместить а раму, которая, в свою очередь, тоже может вращаться вокруг оси, перпендикулярной к оси вращения ротора, то говорят, что гироскоп имеет две степени свободы (двухстепенной гироскоп). Если ось этой рамы будет помещена еще в одну раму, которая также имеет возможность вращаться вокруг оси, перпендикулярной к осям ротора и первой рамы, то такой гироскоп имеет три степени свободы и называется.трехстепенным (рис. 1). Ось вращения ротора гироскопа есть его главная ось. В современных гироскопах ротор приводится во вращение электрическим способом и является вращающейся частью электродвигателя постоянного тока электродвигателя переменного свободы: трехфазного тока.

Рис. 1.Гироскоп с тремя степенями свободы
1 — ротор; 2 — внутренняя рамка; 3 — внешняя рамка; оси: zz – ротора,
хх – внутренней рамки, yy – внешней рамки.
Основные свойства гироскопа. Для облегчения изучения свойств гироскопа принято понятие свободный гироскоп. Свободным гироскопом называется гироскоп с тремя степенями свободы, на который не действуют никакие внешние силы, поэтому главная ось гироскопа остается неподвижной в пространстве. Для того чтобы на гироскоп не действовали внешние силы, центр его тяжести должен лаходиться в точке пересечения осей карданного подвеса, трение в подшипниках которого должно быть равно нулю.
Однако практически получить свободный гироскоп невозможно, так как нельзя свести моменты внешних сил к нулю, нельзя достигнуть полното совпадения центра тяжести гироскопа и точки пересечения его осей, т. е. невозможно достигнуть его сбалансированности, а также полностью освободиться от трения и подшипниках осей гироскопа, можно только его уменьшить. Поэтому наряду с понятием свободный существует понятие технический гироскоп.
Технический гироскоп — это такой, в котором, хотя и в незначительной мере, проявляется несбалансированность и трение в подшипниках. В практике приходится иметь дело только с техническим гироскопом. Отклонение главной оси гироскопа от сданного направления приводит к возникновению ошибок в показаниях прибора.
Для поддержания главной оси гироскопа в заданном направлении в приборах имеются корректирующие устройства. Свободный гироскоп обладает следующими свойствами: главная ось zz сохраняет неизменным свое направление в пространcтве; если к главной оси приложить внешнюю силу, то она отклонится не в том направлении, в котором действует сила, а в направлении, перпендикулярном к действию силы. Это движение главной оси гародкопа называется прецессией.

(Если к оси шарнирно закрепленного в точке О гироскопа прикрепить пружину и тянуть за нее вверх с силой , то ось гироскопа будет перемещаться не в направлении силы, а перпендикулярно к ней, вбок. Это движение называется прецессией гироскопа под действием внешней силы. )
Свойство устойчивости гироскопа позволило применять его при измерениях угловых положений самолета, а прецессия используется для управления им. На базе гироскопа с тремя степенями свободы создан целый ряд приборов, которые применяются при самолетовождении и пилотировании. К ним относятся авиагоризонты и курсовые системы.
Авиагоризонт АГК-47 (Вид индикации - "вид с земли на воздушное судно (ВсЗ)".)— комбинированный, электрический, состоит из трёх приборов, смонтированных в одном корпусе: авиагоризонта, указателя поворота и указателя скольжения. Авиагоризонт служит для определения положения самолёта относительно горизонта. Принцип действия основан на свойстве главной оси свободного гироскопа сохранять в пространстве неизменным приданое положение.

Чувствительным элементом авиагоризонта является гироскоп с вертикальным положением главной оси. Ось вращения ротора наклонена вперёд по полёту на угол 2˚ для уменьшения ошибок при разворотах. Гироскопический узел горизонта состоит из гиромотора, вращающегося со скоростью 20000 — 22000 об/мин. Гиромотор питается трёхфазным напряжением 36 В, частотой 400 Гц.
В авиагоризонте имеется арретирующее устройство, служащее для быстрого восстановления главной оси гироскопа в вертикальное положение при больших ее завалах, а также для предотвращения повреждений при транспортировании (правая ручка).
Проверка работоспособности и правильности работы прибора:
1. Включить питание и заарретировать прибор, затем разарре-тировать его и подождать пока силуэт самолета не установится неподвижно.
2. Подвести поближе к силуэту самолета подвижной индекс линии горизонта и заметить положение самолета относительно индекса.
3. Заарретировать прибор и вновь разарретировать его и после восстановления силуэта самолета снова определить его положение относительно линии горизонта.
Если прибор исправен, эти положения не должны отличаться одно от другого более чем на 2°.
Пользование авиа горизонтом.
1. До выруливания:
· включить питание на центральном пульте (АЗС - третий)

(время готовности 3 мин при t>+20, 5 мин при t= +20_-30, 6 мин при t 0 , оцифровка через 30 0 . Два основных румба помечены буквами С и Ю.
Читайте также: