
Перспективы применения промышленных роботов реферат
Обновлено: 05.07.2024
Место и значение промышленной робототехники в современном производстве, основные области ее применения и перспективы развития. Основные виды промышленных роботов, особенности их применения в отраслях производства. Положение робототехники на мировом рынке.
| Рубрика | Производство и технологии |
| Вид | статья |
| Язык | русский |
| Дата добавления | 18.12.2017 |
| Размер файла | 943,6 K |
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Анализ современного состояния применения роботов в промышленности
Данная статья посвящена промышленной робототехнике, ее месту в современном производстве, основных областях применения и перспективах развития. Дана небольшая характеристика основных видов промышленных роботов, особенности их применения в отраслях производства, приведены статистические данные о положении робототехники на мировом рынке, сделаны выводы о значении робототехники в промышленности и путях ее развития.
Ключевые слова: промышленный робот, робототехника, робот-манипулятор, робот-укладчик, робот-сварщик, окрасочный робот, сборочный робот, система автономного программирования, энергоэффективность, адаптивность
Робототехника на современном рынке
Сегодня на промышленных предприятиях крайне востребованы автоматизированные системы, актуальны инновационные решения, которые помогают наладить эффективную производственную работу и в то же время минимизировать отрицательное воздействие на работников.
Все это способствовало внедрению на предприятия промышленных роботов, отличающихся своей высокой производительностью, не требующих время на отдых, исключающих из своей работы ошибки.
Для того, чтобы оценить текущее положение дел в сфере робототехники, воспользуемся данными Международной федерации робототехники. Согласно прогнозам, в 2016 году планируется продать около 250 000 промышленных роботов. При этом страны Азии закупают наибольшую их часть (64%), затем идет Европа, на которую приходится около 20% объема закупок, и США, чья доля составляет около 16%. (Рис. 1)
Рисунок 1. Ежегодные продажи промышленных роботов в мире
Рассматривая статистику применения роботов по отраслям, наибольшей популярностью пользуется автомобилестроение, в котором лидирующую позицию по роботизации отрасли занимает Япония, следом за ней идут Италия, Германия и США. Наиболее востребованными с точки зрения применения роботов в производстве работами являются грузопереноска (40%), сварочные работы (28%), работа в чистых помещениях (14%).
Исходя из наблюдений увеличения продаж в сфере робототехники, можно утверждать о расширении сферы ее употребления. Развитие производства мотивирует производителей совершенствовать технические особенности выпускаемой продукции, переходить на новые, более легкие и в тоже время долгосрочные материалы, применять передовые технологии в разработках. Именно такими особенностями обладают роботы - относительная простота в эксплуатировании, возможность выполнять монотонные операции, разноплановую работу. Они отличаются высокой стабильностью, не нуждаются в обучении. Одной из главных их особенностей является то, что при необходимости роботизированную технику можно настроить для выполнения другой работы, изменив ее настройки [1, с. 63].
Одной из главных отраслей применения роботов является авиастроение. Роботы отлично подходят для таких повторяемых сборочных операций, как клепка, сверление, сварка и выкладка композитных материалов. Так же роботы участвуют в автоматизации процессов подготовки поверхностей, фасонного фрезерования, окраски, нанесения покрытий и неразрушающего контроля.
Компания Spirit AeroSystems Inc. применяет роботов в некоторых производственных процессах, таких как изготовление фюзеляжа Boeing 787, Boeing 737, Cessna Columbus, пилонов и конструктивных элементов крыльев, компонент реверса тяги, салона и кабины Sikorsky CH-53K [8].
Основные виды промышленных роботов
Однако специфика различных применений промышленных роботов заставляет изготовителей разрабатывать специализированных роботов под конкретные задачи. Например, для таких операций, как укладка материалов на поддоны и транспортеры, используются специальные роботы-укладчики. К достоинствам такого робота можно отнести простоту кинематики, за счет чего возможна одна система управления для сразу нескольких роботов, относительно компактные размеры, высокую скорость и энергоэкономичность. С другой стороны, имея 4 управляемые оси, такие роботы могут переориентировать переносимый груз всего в 4 горизонтальных плоскостях. Данную модель на сегодняшний момент можно увидеть в продаже у таких компаний, как: KUKA, Columbia Machine, Mцllers North America, Ouellette Machinery Systems, American-Newlong, Frain Industries и др [7].
Еще одна широкая область применения роботов - электродуговая сварка. Согласно исследованиям об использовании промышленных роботов в производстве, в сварочных работах задействовано почти 20% всех промышленных роботов, половина из которых применяются в США.
За счет применения аргонно-дуговой (TIG, MIG, MAG) или точечной сварки (RWS) с использованием промышленного робота-сварщика работа становится эффективнее, качественнее и быстрее.
На сегодняшний день популярна роботизация процесса лазерной сварки (LBW). Ее преимуществом является то, что при небольшом воздействии на изделие возможна фокусировка лазера на точке с варьированием от 0,2 мм, что обеспечивает качественную сварку.
Дистанционность сварки и увеличение диапазонов использования сварочного процесса достигаются за счет длины фокусировки, которая составляет до 2 метров. Метод автоматизации сварочного процесса применяется в таких отраслях, как авиастроение, автомобилестроение, приборостроение, медицине и т.д.
Роботы-сварщики позволяют экономить производственное время в несколько раз. Это достигается за счет модернизации сварочной оснастки, что обеспечивает быстрый цикл сборки конструкции.
Также большое значение имеет многофункциональность таких роботов. Например, можно сделать сварку посредством смены горелки или режимов сварки без переустановки детали. (Рис. 2б)
Рисунок 2. Робот-манипулятор OWI-535 и робот-сварщик TB-1400
Существуют также роботы для окраски и напыления. Их конструкция предполагает наличие полого компактного герметичного полого запястья, форма которого позволяет надеть на него чехол для защиты робота от внешних загрязнителей. У этого запястья сквозной канал для того прямого доступа к распылительной форсунке. Производители роботов этой модели - фирмы Yaskawa, Kawasaki, Swamiali Automation, Gridbots Technologies Private Limited и др [6].
Важный вопрос в процессе использования роботов в производстве является их программирование [5]. Зачастую программировать робота посредством ручного обучения точек программной траектории является слишком дорогостоящим и технически сложным процессом, поэтому сегодня многие компании отдают предпочтение системам автономного программирования. робототехника промышленный производство
Эта система позволяет моделировать в 3D-графике программы для одного или нескольких роботов, что используется в таких отраслях, как окраска, сварочные работы, укладка грузов. Даже для более сложных процессов эта система будет полезна в качестве подготовительного этапа. (Рис. 3)
Рисунок 3. Система автономного программирования CAD-CAM
Перспективы использования приложений виртуальной реальности для промышленных роботов не так велики, как например, для компьютерных игр, но все же, в некоторых случаях, например, при работе на труднодоступных или опасных для человека местах, очень актуальны. Разработчики технологии IVRE (Immersive Virtual Robotics Environment), позволяющей в виртуальном пространстве не только управлять роботом, но и пользоваться виртуальным меню и другими объектами в ходе работы, считают, что преимущество их изобретения в том, что теперь движения робота программируются гораздо быстрее, чем посредством традиционного программирования.
Направления развития роботизации
Робототехника является одной из важных отраслей развития промышленности. На сегодняшний момент главные покупателями промышленных роботов являются крупные предприятия. Несмотря на это, малые и средние компании также являются востребованным покупателем промышленной робототехники, так как играют существенную роль на рынке. В Европе главными проблемами, препятствующими развитию робототехники, являются [3]:
низкая осведомленность потенциальных потребителей о способах и преимуществах применения робототехники;
опасения пользователей по поводу сложности системы;
высокая стоимость покупки робота и внедрения его в производство;
несоответствие функций системы постоянно изменяющимся потребностям на производственном рынке.
Для того чтобы быть конкурентоспособными, робототехнические системы должны обладать следующими свойствами:
относительная простота в управлении;
удобство в использовании;
адаптируемость к изменениям;
безопасность в использовании;
эргономичность внешнего вида;
энергоэффективность, обеспечение автономного энергоснабжения;
Наиболее важными направлениями развития робототехники являются: разработка интеллектуальных систем управления роботами и внедрение средств виртуальной реальности в управление роботами. Некоторые направления реализации виртуальной реальности в управлении предприятиями приведены в [4].
Специалисты в области робототехники стремятся к повышению автономности роботов, возможности их функционирования в неструктурированной среде, к развитию методов безопасного взаимодействия робота с человеком, упрощению систем программирования.
Исходя из приведенных данных, можно уверенно сказать о большой важности робототехники для современного производства. Постоянные изменения, совершенствования в технологиях промышленности открывают новые востребованные сферы применения роботов, что позволяет автоматизировать многие процессы на производстве, повышает его эффективность.
Роботы становятся многофункциональными и в тоже время специализированными под конкретную задачу, простыми в управлении и эксплуатации. Разработчики нацелены на дальнейшее увеличение адаптивности, мобильности, безопасности, простоты интеграции и применения роботов.
1. Иванов А.А. Основы робототехники. М.: Форум, 2012. - С. 224 (дата обращения: 30.09.2015).
3. Попов А. А., Корнеева С. А. Предпосылки применения технологий для реализации виртуальной реальности в информационных системах в экономике // Экономика. Управление. Право. - 2012. - №4-1(28). - С.44-49 (дата обращения: 30.09.2015).
4. Тягунов О. А. Математические модели и алгоритмы управления промышленных транспортных роботов // Информационно-измерительные и управляющие системы. -- 2007. -- Т. 5, № 5. -- С. 63--69 (дата обращения: 30.09.2015).
Подобные документы
Рассмотрение истории развития робототехники в соотношении с историей всего человечества. Ознакомление с такими понятиями, как "Робот", "Андроид", "Машина", "Механизм" и "Робототехника". Применение роботов в наше время и планы на будущее в этой сфере.
реферат [3,7 M], добавлен 18.12.2014
Проблема эстетического совершенствования машин, станков, приборов, средств транспорта, бытовой техники. Основные виды промышленных роботов, особенности их дизайна. Роботы для мероприятий, их достоинства и недостатки. Обзор аналогов промышленных роботов.
реферат [480,8 K], добавлен 20.02.2015
Применение промышленных роботов в производстве. Технические характеристики токарного станка. Выбор промышленного робота. Загрузочно-накопительное устройство. Компоновка роботизированного технологического комплекса. Блок-схема и циклограмма работы.
контрольная работа [604,4 K], добавлен 07.06.2014
Характеристика промышленных роботов как автономного устройства, состоящего из механического манипулятора и перепрограммируемой системы управления. Типы управления промышленными роботами. Классификация и конструктивно-технологические параметры ПР.
реферат [23,4 K], добавлен 29.01.2010
Бионический подход в разработке автоматизированных автономных устройств, его сущность и содержание. Разработка змееподобных роботов как перспективное направление развития робототехники. Исследование двадцатизвенной бесколесной модели, ее преимущества.
- Для учеников 1-11 классов и дошкольников
- Бесплатные сертификаты учителям и участникам
2. Характеристика промышленных роботов
3. Управление промышленным роботом
4. Классификация и конструктивно технологические параметры ПР
5. Движения в ПР
6. Технические характеристики ПР
7. Целесообразность использования ПР
8. Список используемой литературы
В первую очередь необходимо сказать необходимо, что промышленным работам или ПР нашли широкое применение на производстве, а именно в отрасли машиностроения. Так как в наше время производство все больше автоматизируеться с целью его усовершенствования, именно в этих целях востребованны ПР, как составная часть автоматизированого произодства.
Промышленный робот являеться частью работизированного технологического комплекса или же РТК. Не для кого сейчас не секрет, что применение промышленных роботов значительно упрощяет процесс производства, со времени своего появления от первых промышленных роботов и до нынешних умных машин ПР они сразу же заслужили уважение и востребованность со стороны машиностроительных предприятий, и уже сегодня нельзя представить себе полноценное автоматизированное производство без этой не мало важной составной части.
Характеристика промышленных роботов
Промышленный робот — автономное устройство, состоящее из механического манипулятора и перепрограммируемой системы управления, которое применяется для перемещения объектов в пространстве в различных производственных процессах. Промышленные роботы являются важными компонентами автоматизированных гибких производственных систем (ГПС), которые позволяют увеличить производительность труда. В составе робота есть механическая часть и система управления этой механической частью, которая в свою очередь получает сигналы от сенсорной части. Механическая часть робота делится на манипуляционную систему и систему передвижения:
· Манипулятор — это механизм для управления пространственным положением орудий и объектов труда.
Манипуляторы включают в себя подвижные звенья двух типов:
- звенья, обеспечивающие поступательные движения
- звенья, обеспечивающие угловые перемещения
Сочетание и взаимное расположение звеньев определяет степень подвижности, а также область действия манипуляционной системы робота.
Для обеспечения движения в звеньях могут использоваться электрические, гидравлический или пневматический привод.
· Система передвижения
Внутри помещений, на промышленных объектах используются передвижения вдоль монорельсов, по напольной колее и т. д.
Управление промышленным роботом
Управление бывает нескольких типов:
1. Программное управление — самый простой тип системы управления, используется для управления манипуляторами на промышленных объектах. В таких роботах отсутствует сенсорная часть, все действия жёстко фиксированы и регулярно повторяются. Для программирования таких роботов могут применяться среды программирования типа VxWorks/Eclipse или языки программирования например Forth, Оберон, Компонентный Паскаль, Си. В качестве аппаратного обеспечения обычно используются промышленные компьютеры в мобильном исполнении PC/104 реже MicroPC. Может происходить с помощью ПК или программируемого логического контроллера.
2. Адаптивное управление — роботы с адаптивной системой управления оснащены сенсорной частью. Сигналы, передаваемые датчиками, анализируются и в зависимости от результатов принимается решение о дальнейших действиях, переходе к следующей стадии действий и т. д.
3. Основанное на методах искусственного интеллекта.
4. Управление человеком (например, дистанционное управление).
Принципы управления ПР:
Современные роботы функционируют на основе принципов обратной связи, подчинённого управления и иерархичности системы управления роботом.
Иерархия системы управления роботом подразумевает деление системы управления на горизонтальные слои, управляющие общим поведением робота, расчётом необходимой траектории движения манипулятора, поведением отдельных его приводов, и слои, непосредственно осуществляющие управление двигателями приводов.
Подчинённое управление служит для построения системы управления приводом. Если необходимо построить систему управления приводом по положению (например, по углу поворота звена манипулятора), то cистема управления замыкается обратной связью по положению, а внутри системы управления по положению функционирует система управления по скорости со своей обратной связью по скорости, внутри которой существует контур управления по току со своей обратной связью. Современный робот оснащён не только обратными связями по положению, скорости и ускорениям звеньев. При захвате деталей робот должен знать, удачно ли он захватил деталь. Если деталь хрупкая или её поверхность имеет высокую степень чистоты, строятся сложные системы с обратной связью по усилию, позволяющие роботу схватывать деталь, не повреждая её поверхность и не разрушая её. Управление роботом может осуществляться как человеком-оператором, так и системой управления промышленным предприятием (ERP-системой), согласующими действия робота с готовностью заготовок и станков с числовым программным управлением к выполнению технологических операций.
Классификация и конструктивно технологические параметры ПР
Классификация промышленных роботов:
1. По виду производства ПР делят на специальные, специализированные и универсальные.
· Специальные ПР выполняют определенную технологическую операцию или вспомогательную модель оборудования;
· Специализированные ПР выполняют операции одного вида, например сварку, сборку и обслуживают определенную группу моделей оборудования;
· Универсальные ПР являются наиболее усовершенствованными представителями промышленных роботов, служат для выполнения разных операций и функционируют с оборудованием различного назначения ( разнородных операций ).
2. По грузоподъемности различают ПР на сверхлегкие (грузоподъемность не более 1 кг.), легкие (грузоподъемность от 1 до 10 кг.), средние (грузоподъемность от 10 до 200 кг.), тяжелые (грузоподъемность от 200 до 1000 кг.) и сверхтяжелые (где грузоподъемность свыше 1000 кг.).
3. По возможности передвижения ПР подразделяют на стационарные и подвесные.
· Стационарные имеют ориентирующие и транспортирующие движения;
· Транспортирующие ПР дополнительно к этим двум движениям (ориентирующие и транспортирующие) и координатные перемещения.
4. По числу степеней подвижности ПР, выпускают роботы с 2-мя, 3-мя, 4-мя и более степеней подвижности.
5. По способу установки ПР делят на встроенные (хотя встроенные промышленные роботы и считаются компактными в плане габаритов, но при этом они обслуживают только один станок), подвесные (возможность обслуживания до 2-х станков) и напольные (возможность обслуживания до 2-х и более станков, но при этом они имеют более сложные задачи, например обеспечить смену инструмента.
6. По виду привода ПР подразделяют на роботы с электрическим, гидравлическим, пневматическим и комбинированным приводам.
7. По виду управления ПР различают:
· Роботы с погромным управлением (цикловым, числовым, позиционным и контурным);
· Роботы с адаптивным управлением (промышленные роботы с адаптивным управлением имеют измерительные устройства и устройства для восприятия внешней среды, управляющая программа или УП в этом случае не должна содержать всю необходимую информацию).
8. По способу программирования различают ПР программируемые обучением ( по методу обучения оператор, управляя промышленным роботом приводит его захватное устройство или ЗУ из одного конечного положения в другое через серию точек, которые фиксируются в запоминающем устройстве промышленного робота и при обработке следующих деталей захватное устройство будет двигаться по этим точкам) и аналитические (путем расчета программ).
Движения в ПР
Различают следующие движения в промышленных роботах:
1. Транспортирующие – в направлениях XY, j xy, j zx
Транспортирующие движения служат для перемещения ЗУ в различные точки рабочего транспорта;
2. Ориентирующие – в направлениях j yz и Q
Ориентирующие движения передают захватному устройству (ЗУ) необходимое положение в заданной точке рабочей зоны;
3. Координатное – Y, X
Координатные движения обеспечивают перемещения ПР между отдельными производственными позициями. Рабочие движения промышленных роботов направлены на удержание объекта и перемещения его в заданных направлениях. Система координат ПР определяют компоновочную схему ПР и форму рабочей зоны: прямоугольная плоская, прямоугольная пространственная, полярная, цилиндрическая, сферическая.
Технические характеристики ПР
1. Грузоподъемность промышленного робота определяется наибольшей массой изделия (например, детали, инструмента или приспособления), которым он может манипулировать в пределах рабочей зоны;
2. Число степеней подвижности промышленного робота определяется общим числом поступательных и вращательных движений манипулятора, без учета движений зажима-разжима его схвата. Большинство промышленных роботов в машиностроении имеет до пяти степеней подвижности;
3. Рабочая зона определяет пространство, в котором может перемещаться схват манипулятора. Обычно оно характеризуется наибольшими перемещениями захватного устройства вдоль и вокруг каждой оси координат.
Мобильность промышленного робота определяется его способностью совершать разные по характеру движения: перестановочные (транспортные) перемещения между рабочими позициями, находящимися на расстоянии, большем, чем размеры рабочей зоны манипулятора; установочные перемещения в пределах рабочей зоны, определяемой конструкцией и размерами манипулятора; ориентирующие перемещения схвата, определяемые конструкцией и размерами кисти - конечного звена манипулятора. Промышленные роботы могут быть стационарными, не имеющими перестановочных перемещений, и передвижными, обеспечивающими все названные виды движений
Целесообразность использования ПР
· достаточно быстрая окупаемость
· исключение влияния человеческого фактора на конвейерных производствах, а также при проведении монотонных работ, требующих высокой точности;
· повышение точности выполнения технологических операций и, как следствие, улучшение качества;
· возможность использования технологического оборудования в три смены, даже 365 дней в году;
· рациональность использования производственных помещений;
· исключение воздействия вредных факторов на персонал на производствах с повышенной опасностью;
Список используемой литературы
В настоящее время современная промышленность не обходится без автоматизированных систем и инновационных решений, позволяющих многократно увеличить объемы производства. Расширение применения роботов обусловлено стремлением к повышению производительности и повышению качества выпускаемой продукции.
На крупных производственных площадках идет стремление к минимизации антропогенного влияния. Данное явление объясняется следующими факторами:
· Нехватка квалифицированной рабочей силы
· Освобождение от тяжелого физического труда
· Снижением стоимости промышленных роботов
· Снижением вредного влияния на рабочих, особенно в металлургии, сварочных процессах и ядерной промышленности
Одними из основных областей применения роботов является авиастроение, автомобилестроение, медицина и приборостроение. Роботы используются для сверления, сварки деталей и сборочных узлов, покраски, подготовке поверхностей и проведению различных видов контролей качества изготовляемой продукции, применяемых на производстве. Роботы могут стабильно выполнять сложные задачи, монотонные операции.
Там, где человек находиться не может из-за условий опасной для жизнедеятельности среды, роботизированные системы способны работать дистанционно, практически не ограниченное время. Так, например, при утилизации ядерных отходов применяют специальные манипуляторы, чтобы минимизировать воздействия радиации на организм человека.
Наряду с положительными качествами, промышленные роботы имеют ряд недостатков, что затрудняет широкомасштабную автоматизацию производственной среды. К главным недостаткам относятся:
· Высокая стоимость оборудования
· Нехватка специалистов, способных управлять роботизированными системами
· Сложность задания определенных параметров
Разнообразие роботов поражает. Для этого существует определенная классификация для разработки типажа. Она включает в себя следующие признаки:
· По характеру выполнения технологических операций
· По степени специализации
· По типам производства
· По системе координат основных перемещений манипулятора
· По характеру программирования
С каждым годом повышается внедрение передовых роботизированных комплексов в промышленное производство. Это объясняется стремлением предприятий выйти на новый уровень производства, что позволит быть более востребованными и конкурентоспособными.
Международная федерация робототехники (IFR) представила рекордные показатели сбыта на
Годовой прогноз роста, составленный IFR на ближайшие годы, находится в двузначном процентном диапазоне. Согласно данным с 2015 по 2017 годы будут задействованы еще 900 000 промышленных роботов.
По количеству роботов на душу населения лидером является Япония, где на 10 000 работников предприятий приходится 300 роботов, сильно отстают США и Европа, разрыв с другими странами еще более значителен. В Европе на 10 000 работников приходится в среднем 50 роботов, большинство которых заняты в тяжелом промышленном производстве, фармацевтике, автомобилестроении. Лидером в Европе является Германия (100 роботов), далее с 70 роботами на 10 000 человек следуют Швеция и Италия.
В настоящее время человечество не может обойтись без роботизированных систем. Для этого огромное количество ученых занимаются внедрением новых технологий. Это улучшает нашу жизнь и делает ее современнее.
1. Бабич, А. В. Промышленная робототехника / А.В. Бабич. - М.: Книга по Требованию, 2012. - 263 c
2. Иванов, А. А. Основы робототехники / А.А. Иванов. - М.: Форум, 2012. - 224 c.
3. Макаров, И. М. Робототехника. История и перспективы / И.М. Макаров, Ю.И. Топчеев. – М.: Наука, МАИ, 2003. - 352 c.
Широкое распространение в производственной деятельности человека получили сегодня промышленные роботы. Они служат одним из эффективнейших средств механизации и автоматизации транспортных и погрузочных работ, а также многих технологических процессов.
Положительный эффект от внедрения промышленных роботов обычно заметен одновременно с нескольких сторон: растет производительность труда, улучшается качество конечного продукта, снижаются затраты на производство, улучшаются условия труда для человека, и наконец, переход предприятия с выпуска одного вида продукции на другой значительно облегчается.
Однако для достижения столь обширного и многогранного положительного эффекта от внедрения промышленных роботов на уже работающие ручные производства, необходимо предварительно рассчитать планируемые затраты на сам процесс внедрения, на стоимость робота, а также взвесить, адекватна ли вообще сложность вашего производства и технологического процесса — плану модернизации при помощи установки промышленных роботов.
Ведь иногда производство настолько упрощено изначально, что установка роботов просто нецелесообразна и даже вредна. К тому же для наладки, обслуживания, программирования роботов — потребуются квалифицированные кадры, а в процессе работы — вспомогательные устройства и т. д. это важно учитывать заранее.

Промышленные роботы в современном производстве
Так или иначе, роботизированные безлюдные решения на производствах приобретают сегодня все большую актуальность хотя бы потому, что вредное влияние на здоровье человека сводится к минимуму. Прибавим сюда понимание того, что полный цикл обработки и монтажа осуществляется быстрее, без перерывов на перекур и без ошибок, свойственных любому производству, где вместо робота действует живой человек. Человеческий фактор, после настройки роботов и запуска технологического процесса, практически исключается.
На сегодняшний день ручной труд в большинстве случаев замещается трудом робота манипулятора: инструментальный захват, фиксация инструмента, удержание заготовки, подача ее в рабочую зону. Ограничения накладывают лишь: грузоподъемность, ограниченность рабочей зоны, предварительно запрограммированные движения.
Промышленный робот способен, тем не менее, обеспечить:
- высокую производительность, благодаря быстрому и точному позиционированию
- лучшую экономичность, так как не нужно платить зарплату людям, которых он собой заменяет, достаточно одного оператора
- высокое качество — точность порядка 0.05 мм, низкая вероятность появления брака
- безопасность для здоровья людей, например в силу того, что при покраске теперь контакт людей с лакокрасочными материалами исключается
- наконец, рабочая зона робота строго ограничена, а обслуживание ему требуется минимальное, даже если рабочая среда химически агрессивна, материал робота выдержит это воздействие.
Промышленные роботы в современном производстве
Исторически первый промышленный робот, изготовленный по патенту, был выпущен в 1961 году компанией Unimation Inc для завода General Motors в Нью-Джерси. Последовательность действий робота записывалась в виде кода на магнитный барабан и выполнялась в обобщенных координатах. Для осуществления действий робот использовал гидроусилители. Данная технология потом была передана японской Kawasaki Heavy Industries и английской Guest, Keen and Nettlefolds. Так производство роботов от Unimation Inc несколько расширилось.
К 1970 году в Стэнфордском университете был разработан первый робот, напоминающий возможностями человеческую руку с 6 степенями свободы, который управлялся с компьютера, а приводы имел электрические. Одновременно разработки ведет японская Nachi. Немецкая KUKA Robotics в 1973 году продемонстрирует шестиосевого робота Famulus, а швейцарская ABB Robotics уже начнет продавать робота ASEA, — тоже шестиосевого и на электромеханическом приводе.
В 1974 японская компания Fanuc налаживает собственное производство. В 1977 выпускается первый робот Yaskawa. С развитием компьютерной техники роботы все больше внедряются в автомобилестроение: в начале 80-х General Motors вкладывает сорок миллиардов долларов в формирование собственной системы автоматизации заводов.

Промышленный робот сварщик
Как автомобильное производство обойдется без сварки? Никак. Вот и выходит, что все автомобильные производства мира оснащены сотнями комплексов роботизированной сварки. Каждый пятый промышленный робот занимается сваркой. Далее по востребованности идет робот-погрузчик, но аргонодуговая и точечная сварки — на первом месте.
Никакая ручная сварка не сравнится по качеству шва и по степени контроля за процессом со специализированным роботом. Что и говорить о лазерной сварке, где с расстояния до 2 метров сфокусированным лазером технологический процесс осуществляется с точностью до 0,2 мм — это просто незаменимо в авиастроении и медицине. Прибавьте сюда интеграцию с CAD/CAM цифровыми системами.
Робот-сварщик имеет три главных действующих узла: рабочий орган, ЭВМ управляющую рабочим органом и память. Рабочий орган оснащен захватом, похожим на кисть руки. Орган имеет свободу перемещения по трем осям (X, Y, Z), а сам захват способен вращаться вокруг этих осей. Робот и сам может перемешаться по направляющим.

Промышленные роботы для автоматической загрузки и выгрузки изделий
Ни одно современное производство не обойдется без выгрузки и погрузки, независимо от габаритов и веса изделий. Робот самостоятельно установит заготовку в станок, а после — выгрузит и уложит. Один робот способен взаимодействовать сразу с несколькими станками. Конечно, нельзя не упомянуть в этом контексте погрузку багажа в аэропорту.
Роботы уже сейчас позволяют минимизировать затраты на содержание персонала. Речь не только о таких простых функциях, как работа штампом или оперировании печью. Роботы способны поднимать больший вес, в гораздо более тяжелых условиях, при этом не уставая и затрачивая существенно меньше времени, чем потребовалось бы живому человеку.
На литейном и кузнечном производствах, к примеру, условия традиционно очень тяжелы для людей. Данного рода производства находятся на третьем месте после выгрузки-загрузки по объему роботизации. Не даром уже сейчас практически все европейские литейные цеха оснащены автоматизированными системами с промышленными роботами. Стоимость внедрения робота обходится предприятию в сотню тысяч долларов, но в распоряжении появляется весьма гибкий комплекс, окупаемый с лихвой.
Промышленные роботы для лазерной и плазменной резки
Роботизированные лазерная и плазменная резки позволяют улучшить традиционные линии с плазменными горелками. Трехмерная резка и раскрой уголков и двутавров, подготовка для дальнейшей обработки, сварки, сверления. В автомобилестроении данная технология просто незаменима, ибо края изделий необходимо точно и быстро обрезать после штамповки и формовки.
Один такой робот может совмещать в себе и сварку, и резку. Производительность повышается внедрением гидроабразивной резки, исключающей ненужное тепловое воздействие на материал. Таким образом за две с половиной минуты вырезаются все мелкие отверстия в металле кузовов Renault Espace на роботизированном заводе Renault во Франции.
Промышленные роботы для гибки труб
На производствах мебели, автомобилей и прочих изделий полезна роботизированная гибка труб с участием рабочей головки, когда труба позиционируется роботом и сгибается очень быстро. Такая труба может быть уже оснащена различными элементами, что не помешает процессу бездорновой гибки роботом.

Промышленные роботы для сверления изделий
Обработка краев, сверление отверстий, а также фрезеровка — что может быть проще для робота, идет ли речь о металле, древесине или пластмассе. Точные и прочные манипуляторы справляются с данными задачами на ура. Рабочая зона не ограничена, достаточно установить протяженную ось, либо несколько управляемых осей, что даст превосходную гибкость плюс высокую скорость. Человек так не сможет.
Частоты вращения фрезеровочного инструмента достигают здесь десятков тысяч оборотов в минуту, а шлифовка швов и вовсе превращается в череду простых повторяемых движений. А ведь раньше шлифовка и абразивная обработка поверхностей считались чем-то грязным и тяжелым, к тому же очень вредным. Сейчас паста подается автоматически во время обработки войлочным кругом после прохождения абразивной ленты. Быстро и безвредно для оператора.
Перспективы промышленной робототехники огромны, ведь роботы принципиально могут быть внедрены практически в любые процессы производств, причем в неограниченном количестве. Качество автоматической работы порой настолько высоко, что для человеческих рук просто недостижимо. Есть целые крупные отрасли, где ошибки и погрешности недопустимы: авиастроение, точная медицинская техника, сверхточное оружие и т. д. Не говоря уже о повышении конкурентоспособности отдельных предприятий и о положительном эффекте на их экономику.
Благодаря научно-технологическому прогрессу, эта задача была решена, внедрением электронно-вычислительных систем управления и промышленных роботов. Считается, что это одно из самых крупных достижений промышленности, в т.ч. машиностроения.
Многие современные машиностроительные предприятия заинтересованы во внедрении роботов в производство, в первую очередь с целью сократить расходы, и снизить себестоимость готовых изделий. Подобный переход имеет высокую окупаемость в связи с тем, что роботам нет необходимости выплачивать зарплату, отпуск раз в год, не нужно предоставлять социальные пакеты, некоторые способны работать круглосуточно, и т.д. Также использование роботизированных линий производства существенно повышает качество, точность, скорость.
2 История создания промышленных роботов и манипуляторов
3 Манипуляторы и их классификации
По количеству степеней подвижности:
От трёх до шести степеней свободы
Автоматизированные
Автоматические
Прямоугольная
Полярная (сферическая)
Ангулярная (угловая)
Сверхлегкие ( 1 т)
С автоматической балансировкой массы
С предварительной установкой веса
С течением времени в промышленности вводились в эксплуатацию все новые и новые виды роботов. Ниже описаны самые популярные из них, применяемых в машиностроении: [4].
4.1 Роботы сварщики
электрическая дуговая сварка в защитной газовой среде плавким и неплавящимся электродом;
сварка электрической дугой под слоем флюса или шлака;
сварка пламенем плазменной фактуры;
сварка лазером;
комбинированный гибридный вид сварки с применением деформирующих вальцов;
промышленные роботы для сварки точечно
![]()
4.2 Покрасочные роботы
В машиностроении неотъемлемым видом работ является обработка поверхностей перед финальной сборкой. Это может быть грунтовка, предшествующая покраске, или нанесение антикоррозийных покрытий. С этими и другими аналогичными задачами справляется покрасочный-робот. Самые современные оснащаются пульверизаторами для окраски деталей, поворотными столами и 7-8 осевыми манипуляторами для достижения максимально возможной точности, шлангами повышенной гибкости и прочности для защиты от механических повреждений, излома, скручиваний.[9].
![]()
4.3 Роботы резчики
В машиностроительных предприятиях, а также в предприятиях, непосредственно связанных с обработкой металла, пользуются спросом манипуляторы для резки металлов. Современные роботы-резчики оснащаются системой отслеживания положения заготовки. Важный элемент этого устройства – датчик контакта головки интсрумента с заготовкой. От его работы точность позиционирования может достигать 0,05 мм, чего вполне достаточно для обработки даже небольших деталей и деталей, требовательных к точности.[8]
![]()
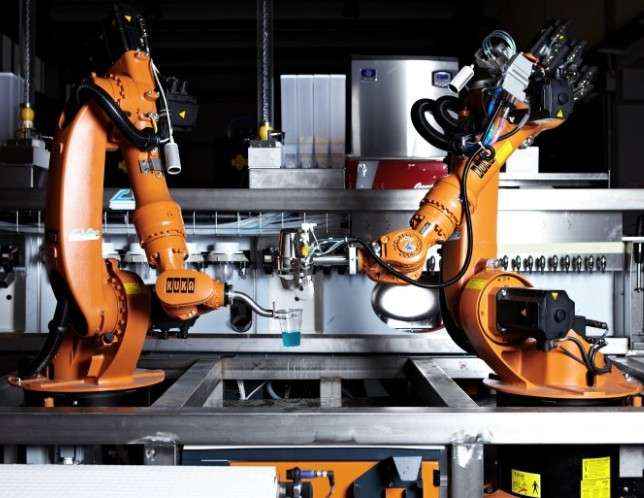
4.4 Роботы-сборщики
Исследования показывают, до 25% всего времени производства занимают сборочные операции. Промышленные манипуляторы, занятые автоматической сборкой изделий, как правило, имеют 6 степеней свободы, которые приводятся в движение благодаря системе сервоприводов, однако их полный потенциал раскрывается при использовании полностью автоматизированной линии производства. Несмотря на это множество операций все еще сложны для выполнения роботами, поэтому выполняются вручную, но большинство простых и многократно повторяющихся операций идеальны для выполнения роботами. [8]
![]()
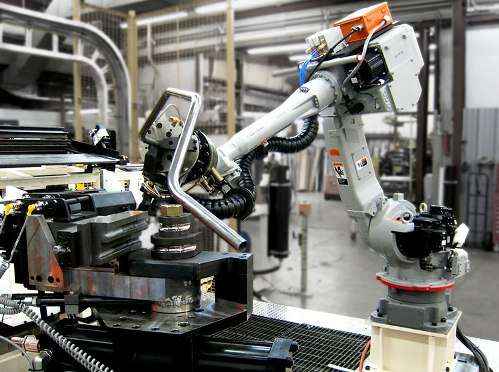
4.5 Роботы-сверлильщики
Операцию сверления, как правило, сейчас производят на станке. И при использовании робота-манипулятора рабочий инструмент закрепляют в захватном устройстве, которое перемещается над заготовкой, высверливая отверстия в необходимых местах. Преимущество использования робота в этом наблюдается, когда приходится работать с крупногабаритными деталями и когда нужно высверливать большое количество отверстий. Например, подобные роботы активно используются в авиастроении, где операции сверления играют важную роль: перед вставкой клепок на одном экземпляре необходимо проделать тысячи отверстий, и неудивительно, что роботы-сверлильщики нашли там свое применение. [8]
![]()
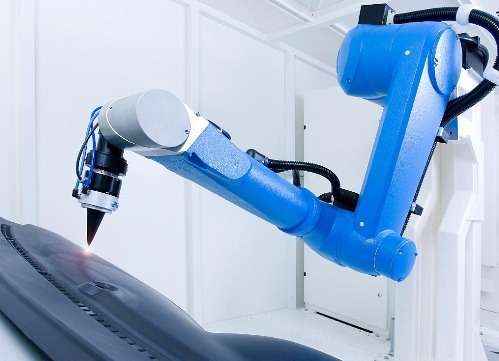
4.6 Роботы для бесконтактной обработки
Роботы, из-за своей ограниченной твердости и жесткости, не всегда могут применяться для резки твердых материалов резанием, поэтому были изобретены роботы для бесконтактной обработки материалов. В частности, для этого используется лазер. В захватном устройстве робота располагается генератор высокоэнергетического когерентного излучения, который направлен на заготовку. Лазер позволяет добиться высочайшей точности при обработке стали, алюминия, других металлов. Программой задается траектория движения лазера, а также мощность его излучения, в зависимости от толщины обрабатываемой детали. Еще одним способ осуществить бесконтактную резку – применение струи жидкости. Такой метод исключает износ инструмента, а также повышает качество резки. [6].
![]()
Заключение
Как видно, темпы роботостроения и применяемости промышленных роботов в машиностроении неуклонно растет, так же, как и на заре их развития. На текущий момент множество видов однообразных и трудоемких работ, до этого выполняемых человеком, заменено роботами. Также, применение промышленных роботов дает преимущество при производстве, в сравнении с конкурентами. Снижение энергозатрат, процент брака, повышение экологичности производства, прибыли – в этом положительные стороны применение роботов, поэтому настолько популярно их распространение.
Многие современные машиностроительные предприятия заинтересованы во внедрении роботов в производство, в первую очередь с целью сократить расходы, и снизить себестоимость готовых изделий. Подобный переход имеет высокую окупаемость в связи с тем, что роботам нет необходимости выплачивать зарплату, отпуск раз в год, не нужно предоставлять социальные пакеты, некоторые способны работать круглосуточно, и т.д. Также использование роботизированных линий производства существенно повышает качество, точность, скорость.
Используемые источники
7. Ю. Г. Козырев. Захватные устройства и инструменты промышленных роботов.
Читайте также:





