
Отечественные радиосистемы посадки летательных аппаратов реферат
Обновлено: 05.07.2024
"ВКО" уже обращался к проблематике ближней навигации (№ 1 (38) за 2008 г.). Предлагаемый вниманию читателей журнала материал является дальнейшим развитием темы.
Одними из главных задач систем радиотехнического обеспечения полетов авиации всех ведомств являются задачи обеспечения навигации и посадки летательных аппаратов в сложных метеоусловиях и ночью. До появления спутниковых радионавигационных систем эти задачи решали с помощью радиомаячных систем ближней навигации и посадки. Наибольшее распространение в мире получили радиомаячные системы VOR/DME, ILS, TACAN и РСБН/ПРМГ.
Радиотехнические системы ближней навигации имеют очень широкое распространение. Только на территории США эксплуатируется более 1000 радиомаяков VOR/DME и VORTAC. Они обеспечивают работу практически всех аэропортов США. 100% магистральных воздушных судов оснащены оборудованием навигации и посадки VOR/DME/ILS .
В настоящее время в связи с широким внедрением спутниковых радионавигационных систем роль радиомаячных систем ближней навигации (особенно для гражданской авиации) уменьшилась. Однако в соответствии с документами ИКАО и Евроконтроля предполагается эксплуатация систем VOR/DME по крайней мере до 2015 г., а радиомаяков системы DME и бортового оборудования с режимом multiDME - и после 2020 г. Система TACAN продолжает широко использоваться странами НАТО и других государств и, судя по планам, от нее не будут отказываться еще долгое время.

АОРЛ-85. Аэродромный посадочный радиолокатор.
Фото: Фотоархив "ВКО"
На протяжении длительного периода времени в России, странах СНГ и ряде зарубежных стран (КНР, Индии, Вьетнаме, Алжире, Египте, Северной Кореи и др.) одним из основных источников информации о местоположении летательных аппаратов при полете по маршруту, возврате на аэродром, заходе на посадку, встречи летательных аппаратов в воздухе для дозаправки являлась отечественная радиотехническая система ближней навигации и посадки.
В состав наземного оборудования радиотехнической системы ближней навигации и посадки входят азимутально-дальномерный радиомаяк, обеспечивающий навигацию воздушного судна на маршруте, а также курсовой и глиссадный радиомаяки, составляющие посадочную радиомаячную группу и обеспечивающие заход на посадку и посадку самолетов.
К настоящему времени в эксплуатации находятся около 400 радиомаяков радиотехнических систем ближней навигации, примерно столько же радиомаяков посадочных радиомаячных групп и не менее 3000 комплектов бортового оборудования. Все военные аэродромы и аэродромы совместного базирования оборудованы посадочными радиомаяками ПРМГ, являющимися для ВВС РФ и стран СНГ практически единственным средством инструментальной посадки самолетов, обеспечивающим круглосуточность и всепогодность их действий.
Радиомаяки радиотехнических систем ближней навигации, установленные на радионавигационных позициях воздушных трасс, в аэропортах, на аэродромах военной авиации и на авианесущих кораблях обеспечивают навигационное поле на высоте 3000 метров над 62% территории СНГ.
Отечественная система РСБН обеспечивает решение следующих основных задач:
непрерывное автоматическое определение местоположения на борту летательного аппарата;
привод летательного аппарата в любую заданную точку в пределах зоны действия системы;
наблюдение за воздушной обстановкой наземной (корабельной) аппаратурой (определение координат и опознавание летательного аппарата, использующих систему и находящихся в зоне ее действия).
Кроме того, отечественная система РСБН обладает рядом дополнительных функций.
Режимы навигации и посадки летательного аппарата реализованы в РСБН с использованием единого бортового радиоэлектронного оборудования, работающего как с наземными и корабельными радиомаяками РСБН, так и с радиомаяками посадочной радиомаячной группы. В процессе развития в РСБН кроме всенаправленного реализован и направленный режим работы, существенно повысивший энергетический потенциал радиолинии, помехоустойчивость системы и улучшивший электромагнитную совместимость с другими радиотехническими средствами, в том числе за счет увеличения с 40 до 176 числа рабочих частотно-кодовых каналов.
РСБН обладает рядом дополнительных функций, отсутствующих в зарубежных системах. В РСБН реализованы:
двусторонняя цифровая линия передачи данных;
аналоговая линия передачи сигналов управления "корабль-борт", используемая при посадке летательного аппарата на авианесущий корабль;
принцип вторичной радиолокации, обеспечивающий наблюдение и опознавание отметок от летательного аппарата на устройствах отображения наземного или корабельного радиомаяка либо командно-диспетчерского пункта;
принцип автоматического зависимого наблюдения при взаимодействии бортового радиоэлектронного оборудования типа А-380 палубных самолетов Су-33 и вертолетов Ка-27 с аппаратурой авианесущего корабля;
режим сбора и встречи самолетов в воздухе для дозаправки топливом.
Важной функцией ряда типов бортового радиоэлектронного оборудования системы РСБН является обеспечение межсамолетной навигации летательных аппаратов.
Цифровая линия передачи данных на частотах и с форматами сигналов РСБН работает в линиях связи "маяк-борт", "борт-маяк" и "борт-борт". При этом используются те же наземные и бортовые приемники и передатчики, что и для целей навигации и посадки. Цифровая линия передачи данных может обеспечивать решение следующих задач:
управление полетом с командно-диспетчерского пункта;
передача полетной информации с борта летательного аппарата для обеспечения автоматического зависимого наблюдения;
обмен информацией между летательными аппаратами при сборе в группу и групповых действиях.
На основе цифровой линии передачи данных может быть создана отечественная локальная система функционального дополнения, которая может быть, в частности, использована для осуществления захода на посадку и посадки самолетов и вертолетов, оборудованных соответствующей аппаратурой спутниковых радионавигационных систем.

Система СП-80. Инструментальная система посадки метрового диапазона волн.
Фото: Фотоархив "ВКО"
Принципиально локальная система функционального дополнения должна состоять из следующих основных частей:
наземных локальных контрольно-корректирующих станций, установленных и геодезически привязанных в местах размещения радиомаяков РСБН;
наземной аппаратуры передачи данных, состоящей из передатчика и цифрового блока, которые устанавливаются на радиомаяке РСБН;
бортового приемника цифровой линии передачи и цифрового модуля, обеспечивающего расчет посадочных данных по информации спутниковых радионавигационных систем и корректирующим данным локальных контрольно-корректирующих станций.
При установке локальной системы функционального дополнения на аэродромах, где одновременно с радиомаяком РСБН эксплуатируются радиомаяки ILS либо посадочной радиомаячной группы, синтезированная траектория посадки, рассчитанная в бортовом оборудовании по корректирующим данным, может быть совмещена с линией посадки ILS (посадочной радиомаячной группы), что при реализации комплексной обработки на борту может значительно повысить показатели качества посадки.
Сравнение принципов действия систем VOR, DME, TACAN и РСБН показывает, что основные характеристики отечественной системы не уступают характеристикам зарубежных систем. Так, дальность действия этих систем примерно одинакова. Она зависит от высоты полета и определяется радиогоризонтом.
Следует отметить, что в системах DME и TACAN используются дальномерные импульсы с длительностью фронтов примерно на порядок большей по сравнению с длительностью фронтов импульсов РСБН. В связи с меньшей длительностью фронта дальномерных импульсов системы РСБН она менее чувствительна к влиянию отражений от местных предметов.
Поэтому в реальных условиях эксплуатации погрешность измерения дальности в системе РСБН меньше, чем в DME и TACAN. Точность измерения азимута также несколько выше, чем в системах VOR и TACAN.
Существенным преимуществом отечественной системы РСБН/ПРМГ особенно важным для военной авиации является то, что посадка военных летательных аппаратов обеспечивается малогабаритными мобильными курсовыми и глиссадными радиомаяками, работающими в том же диапазоне частот, что и азимутально-дальномерные радиомаяки РСБН. Это позволяет не размещать на борту отечественных военных летательных аппаратов (по сравнению с летательными аппаратами стран НАТО) дополнительно к навигационному оборудованию приемную аппаратуру и антенно-фидерные системы метрового диапазона волн для обеспечения посадки с использованием широко распространенных стационарных систем типа ILS.
Однако это преимущество при использовании в настоящее время на аэродромах гражданской авиации России только систем типа ILS становится недостатком, т.к. отсутствие унификации гражданских и военных систем посадки не позволяет осуществлять эффективное взаимное использование аэродромов государственной и гражданской авиации.
Из вышеизложенного очевидно, что гражданская авиация, воздушные суда которой совершают полеты за рубеж, а аэропорты осуществляют прием иностранных воздушных судов, вынуждена с точки зрения технико-экономической эффективности ориентироваться на использование рекомендованных ИКАО систем VOR, DME, ILS и GNSS, в то время как для обеспечения полетов военной авиации с точки зрения военно-экономической эффективности целесообразно сохранять и совершенствовать отечественную систему РСБН/ПРМГ (аналогично позиции МО США по отношению к своей национальной системе TACAN).
Можно отметить два фактора, которые оказывают существенное влияние на развитие и дальнейшее совершенствование национальной системы РСБН:
необходимость конверсии радиочастотного спектра и освобождения диапазона частот 726-960 МГц в интересах развития телевидения и систем сотовой подвижной связи;
позиция гражданской авиации, направленная на планомерное исключение азимутально-дальномерных радиомаяков РСБН из регламента обслуживания полетов и снятие бортового оборудования РСБН/ПРМГ с ВС ГА.
С учетом этих факторов в Минобороны РФ в 2000 г. была разработана "Концепция поддержания в работоспособном состоянии существующих радиотехнических систем ближней навигации и посадки ВВС и освобождения диапазона частот для развития телевидения и сотовых систем связи". Эта концепция была основана на том, что единое радионавигационное поле систем РСБН создается и используется как в мирное, так и в военное время летательными аппаратами всех ведомств.
На базе концепции шла подготовка правительственного распоряжения от 23.11.2001 г. №1564-р, одобрившего программу мер по освобождению радиочастотного диапазона для систем подвижной сотовой связи и по модернизации наземного и бортового оборудования радиотехнических систем ближней навигации и посадки.
Анализ показывал, что ко времени принятия решения №1564-р было выпущено четыре поколения бортового оборудования системы РСБН, при этом на 60% ЛА эксплуатировалась аппаратура РСБН 3-го поколения, аппаратурой 4-го поколения было оборудовано меньше 5% ЛА, остальные ЛА были оборудованы аппаратурой 1 и 2-го поколений.
Поэтому наиболее целесообразным представлялось проведение в первую очередь работ по модернизации 3-го поколения бортовой аппаратуры РСБН как наиболее массовой аппаратуры, эксплуатирующейся на ЛА с достаточно большим запасом по ресурсу и сроку службы.
После этого планировалось провести модернизацию 4-го поколения аппаратуры, а 1 и 2-е поколение аппаратуры РСБН при необходимости предлагалось менять на модернизированное оборудование 4-го поколения.
В процессе разработки проекта "Плана конверсии радиочастотного спектра в Российской Федерации до 2015 г." был предложен новый подход к последовательности шагов по модернизации аппаратуры системы РСБН, который заключался в использовании локально-территориального принципа освобождения частот, в большей степени отражающего интересы, как Минобороны, так и Мининформсвязи России.
В ходе реализации планов конверсии радиочастотного спектра и модернизации отечественной системы РСБН для обеспечения передачи запросных сигналов по тракту "борт-земля" аппаратуры РСБН 3-го поколения разработано широкополосное передающее устройство, полностью взаимозаменяемое с передающим устройством, входящим в состав находящейся в эксплуатации бортовой аппаратуры, но работающее как в новом, так и, для обеспечения преемственности, в старом диапазоне частот.
Для замены азимутально-дальномерных радиомаяков РСБН, находящихся в эксплуатации, разработан малогабаритный радиомаяк "Тропа-СМ", обеспечивающий работу в международном диапазоне частот. Для приема и обработки сигналов бортовой аппаратуры, работающей в новом диапазоне частот, разработан конвертор частот (аппаратура ЧРУ-М) для встраивания в дальномерно-курсовой радиомаяк посадочной радиомаячной группы.
Как следует из вышеизложенного, технические проблемы, стоящие на пути дальнейшего развития отечественной системы РСБН, могут быть решены.
Что касается позиции гражданского авиационного ведомства, то здесь необходимым аргументом для ее изменения должно стать поддержание и восстановление навигационного поля модернизированной системы РСБН Министерством обороны и совместное с летательными аппаратами государственной авиации его использование теми воздушными судами гражданской авиации и других ведомств, которые отходят по мобпланам в угрожаемый период и военное время к вооруженным силам.

Радиолокационная система посадки РСП-10.
Фото: Фотоархив "ВКО"
В настоящее время проводится работа по созданию многофункциональной локальной радиотехнической системы навигации, посадки, определения взаимных координат и информационного обмена. Создание локальной радиотехнической системы обеспечивающей преемственность с находящейся в эксплуатации системой РСБН/ПРМГ, позволит решить не только поставленные в проекте Плана конверсии радиочастотного спектра в России задачи существенного сокращения используемого бортовым и наземным оборудованием РСБН/ПРМГ диапазона частот, но и снижения массогабаритных характеристик интегрированного с ДМЕ бортового многофункционального навигационно-посадочного оборудования.
Использование данных спутниковых радионавигационных систем и создание единого навигационно-информационного поля локальной радиотехнической системы на базе отечественной (РСБН/ПРМГ) и зарубежной (ДМЕ/TACAN) систем является логичным продолжением процесса совершенствования и модернизации национальной системы ближней навигации.
В качестве выводов следует отметить:
1. Значительный потенциал развития, заложенный в отечественную систему РСБН, обеспечивает создание современной многофункциональной локальной радиотехнической системы с функциями навигации, посадки, определения взаимных координат и информационного обмена.
2. Модернизация отечественной радиотехнической системы ближней навигации и посадки РСБН/ПРМГ с целью обеспечения ее работы в международном диапазоне частот 960-1215 МГц, интеграции с зарубежными системами DME/TACAN, а также расширения ее функциональных возможностей позволит наиболее рационально с точки зрения временных и финансовых затрат реализовать планы конверсии радиочастотного спектра и освободить занимаемый в настоящее время диапазон частот 726-960 МГц для развития телевидения и систем сотовой подвижной связи.
3. Создаваемая на принципах работы модернизированной отечественной системы РСБН/ПРМГ перспективная многофункциональная локальная радиотехническая система может явиться основой возрождения единого навигационного поля для авиации всех ведомств Российской Федерации и достижения требуемых для обеспечения высокого уровня безопасности полетов точности, непрерывности и целостности навигационных определений летательных аппаратов.
Анатолий Константинович Колесников
заместитель начальника отдела систем радиолокации и навигации ОАО "Концерн ПВО "Алмаз-Антей"
Геннадий Владимирович Столяров
ведущий научный сотрудник 24-го научно-экспериментального управления Минобороны РФ, кандидат технических наук
Светотехнические и радиотехнические наземные средства аэропортов составляют систему обеспечения посадки воздушных судов.
Ночью и в сложных метеорологических условиях днем, когда естественные наземные ориентиры не видны, значительная роль отводится светотехническим средствам, особенно на завершающих этапах посадки (планирование, выравнивание, приземление и пробег по взлетно-посадочной полосе).
Пилот, установив визуальный контакт с землей, при помощи светотехнических средств получает информацию о положении ВС относительно ВПП (направление на ось ВПП, удаление до ВПП, плоскость горизонта, обозначение ВПП, место приземления и направление пробега после посадки).
Время, в течение которого пилот получает световую информацию, зависит от посадочной скорости воздушного судна и метеорологических условий: чем выше посадочная скорость и меньше дальность видимости световых сигналов, тем меньше времени отводится пилоту для установления визуального контакта средствами системы посадки и принятия решения.
Световые характеристики и места установки огней должны быть такими, чтобы в условиях плохой видимости пилот в зоне приближения к ВППи месту приземления ВС отчетливо видел определенное число светосигнальных огней, по расположению которых мог определить направление на ВПП и крен ВС.
Радиотехнические системы посадки
Радиотехнические системы посадки можно разделить на две основные группы: системы инструментальной посадки, т.е. системы посадки по приборам и системы посадки по командам о земли.
В системах инструментальной посадки активная роль отводится, экипажам снижающихся самолетов, которые производят посадку по приборам, используя сигналы специальных наземных радиосредств, а в системах посадки по командам с земли экипажи снижающихся самолетов выполняют команды наземного персонала, передаваемые по каналам радиосвязи. При этом положение самолета в пространстве определяется с помощью радиолокационных наземных средств.
В настоящее время существует два основных типа инструментальной посадки: упрощенные системы посадки и радиомаячные системы посадки.
Упрощенные системы посадки
Упрощенные системы посадки или системы посадки ОСП обеспечивают вывод ВС на аэродром, выполнение предпосадочного маневра при заходе на посадку, определение местоположения ВС в двух фиксированных точках траектории снижения на посадку и посадки.
Упрощенные системы посадки устанавливают на некатегорированных аэродромах.
В состав ОСП входят дальний и ближний радиомаркерные пункты (ДПРМ и БПРМ), оснащенные дальней и ближней приводными радиостанциями и маркерными радиомаяками (рис.1).
Дальний и ближний радиомаркерные пункты устанавливают на расстояниях соответственно 4000±200 м и 1050±150 м от порога ВПП на продолжении осевой линии ВПП.
| Рис.1. |

Допускается смещение антенной системы приводной радиостанции, устанавливаемой на БПРМ, в сторону от осевой линии ВПП не более чем на 15м, а антенной системы приводной радиостанции, устанавливаемой на ДПРМ, не более чем на 75м.
Приводные радиостанции представляют собой передающие устройства, работающие в диапазоне гектометровых (средних) волн. Они предназначены для привода ВС, оборудованных радиокомпасами, в определенные точки ка местности. Приводные радиостанции различаются уровнем излучающей мощности, а следовательно, дальностью действия и степенью автоматизации. Наиболее широко распространены, автоматизированные приводные радиостанции АПР-7 и АПР-8. АПР-7 используется в качестве дальней приводной радиостанции (ДПРМ), а на БПРМ устанавливается АПР-8.
Принцип действия радиостанций АПР-7 и АПР-8 и конструктивные решения одинаковы. Различаются они уровнем излучаемой мощности и связанными с этим схемными решениями.
Основные технические характеристики АРП-7
Диапазон частот………………………………………150-1300 кГц
Мощность излучения сигнала
Ø в телеграфном режиме……………………..300-1200 Вт
Ø в телефонном режиме………………………150-600 Вт
Ø в телеграфном режиме……………………..350-600 км
Ø в телефонном режиме………………………250-400 км
Резервирование передающих устройств……….100%
Время перехода на резерв…………………………30-90 сек
Управление радиостанцией может быть местным или дистанционным. Техническое состояние радиостанции контролируется автоматически. В случае неисправности в рабочем комплекте осуществляется автоматическое переключение на резервный комплект.
Каждая приводная радиостанция имеет свой сигнал опознавания (позывной). Так, например, дальние приводные радиостанции имеют двухбуквенный опознавательный сигнал, а ближние приводные радиостанции - однобуквенные опознавательный сигнал.
По позывным приводной радиостанции, установленной на ДПРМ, определяют посадочный курс ВПП.
Каждая приводная радиостанция, установленная на аэродроме работает на определенной частоте в заданном режиме. При необходимости работа приводов может быть переведена на резервные частоты по варианту I или II.
Резервные частоты приводных радиостанций:
Ø I вариант: ДПРМ - 725 кГц, БПРМ - 355 кГц;
Ø II вариант: ДПРМ - 355 кГц, БПРМ - 725 кГц.
Резервные частоты с борта ВС не заказываются. Экипажи ВС оповещаются о том, что приводные радиостанции работают на резервных частотах по варианту I или II .
Маркерные радиомаяки предназначены, для маркировки точек их установки на земной поверхности. Установленные на ДПРМ и БПРМ, они служат для определения момента пролета посадочных приводных радиостанций.
Маркерный радиомаяк представляет собой передающее устройство, работающее на фиксированной частоте 75 МГц. Антенна МРМ имеет узкую конусообразную диаграмму направленности в вертикальной плоскости. Благодаря такой диаграмме направленности сигналы МРМ принимаются на ВС только в момент пролета маяка (см.рис.1)
При пролете зоны действия МРМ на борту ВС срабатывает звуковая и световая сигнализации. Для опознавания маяков их сигналы манипулируются последовательно два тире в секунду для ДПРМ и шесть точек в секунду для БПРМ.
Зона действия МРМ на линии курса и глиссады: БПРМ - 300±100; ДПРМ - 600±200.
Курсовой радиомаяк
Курсовой радиомаяк предназначен для задания линий курса посадки, совпадающей с осью ВПП. Линия курса - это геометрическое место точек, ближайших к оси ВПП в горизонтальной плоскости, в которой разность глубины модуляций РГМ равна нулю.


Рис.5.Диаграмма излучения КРМ и ГРМ, работающих по принципу ИЛС
Антенная система КРМ формирует в пространстве одновременно две диаграммы излучения (рис.5). Одна из этих диаграмм должна создаваться несущей частотой, промоделированной по амплитуде частотой 90 Гц, другая диаграмма - той же несущей частотой, промодулированной по амплитуде частотой 150 Гц. Пересечение этих диаграмм образует линию курса, слева от которой преобладает сигнал с частотой модуляций 90 Гц, справа - сигнал с частотой модуляции 150 Гц.
По линии курса посадки, совпадающей с осью ВПП, коэффициент глубины пространственной модуляции М1 и М2 равны между собой, т.е. разность глубины модуляции равна нулю. Слева и справа от линии курса посадки один коэффициент увеличивается, другой уменьшается, РГМ не равна нулю, что и используется для определения углового отклонения ВС от оси ВПП в бортовой аппаратуре.
Основные технические характеристики
Зона действия в горизонтальной плоскости
ограничивается сектором относительно линии курса, град…….±35
Допускается сужение зоны действия в горизонтальной плоскости до ±10° относительно линии курса.
Зона действия в вертикальной плоскости, град……………………7
Дальность действия в секторе ±10° относительно
линии курса в горизонтальной плоскости, км………………………46
Дальность действия в секторе ±35° относительно
линии курса в горизонтальной плоскости, км………………………32
Допустимое отклонение линии курса от оси ВПП
у опорной точки, м:
Передающие устройства аппаратуры должны иметь 100% резервирование. Переход на резервируемую аппаратуру осуществляется автоматически по команде аппаратуры контроля КРМ.

Рис.6. Зона действия КРМ I, II и III категорий в: а) – горизонтальной и б) – вертикальной плоскостях
Глиссадный радиомаяк
Глиссадный радиомаяк задает в пространстве плоскость планирования, наклонную к горизонтальной под определенным углом.
Антенная система глиссадного радиомаяка формирует в пространстве (вертикальной плоскости), двухлепестковые взаимно пересекающиеся диаграммы направленности. Напряжение несущей частоты модулируется по амплитуде напряжениями частоты 90Гц в верхнем лепестке, 150Гц - нижнем (рис.5).
Диаграммы направленности взаимно пересекаются, образуя равносигнальную зону, наклоненную к плоскости горизонта (ВПП) под определенным углом. Оптимальный угол наклона ( Ɵ ) составляет 2°40'.
По линии глиссады коэффициенты пространственной глубины модуляции М1 и М2 одинаковы - РГМ равна нулю. Выше и ниже глиссады коэффициенты М1 и М2 не равны между собой - РГМ не равна нулю. Это используется для определения углового отклонения от линии глиссады в бортовой аппаратуре.
Основные технические характеристики
Зона действия в горизонтальной плоскости относительно
Зона действия в вертикальной плоскости ограничивается
углами относительно горизонта:
Ø выше линии глиссады, град……………………………………….не менее 1,75Ɵ
Ø ниже линии глиссады, град……………………………………….не менее 0,3Ɵ
Пределы установки угла глиссады, град………………………………………………..2-5
Дальность действия, км…………………………………………………………не менее 18
Допустимое отклонение среднего угла глиссады от
установленного номинального значения, град:
Передающие устройства аппаратуры должны иметь 100% резервирование. Переход на резервируемую аппаратуру осуществляется автоматически по команде аппаратуры контроля.

Рис.7. Зона действия ГРМ I, II и III категорий в: а) - горизонтальной и б) - вертикальной плоскостях
Маркерные маяки
Маркерные маяки предназначены для обозначения определенных точек земной поверхности. МРМ вырабатывают сигналы, позволяющие на борту ВС определить момент их пролета над местом установки. В настоящее время в ГА эксплуатируются радиомаяки МРМ-70 и МКЛ-8.
Антенны формируют диаграмму направленности в вертикальной плоскости так называемой факельной формы.
Диаграмма направленности в горизонтальной плоскости имеет такую ширину, чтобы при отклонении ВС от линии курса в пределах зоны действия КРМ ВС не вышло за пределы излучения антенной системы МРМ.
Основные технические характеристики МРМ
Зона действия на линии курса и глиссада, м:
Ø внутреннего МРМ…………………………….150+50
Ø ближнего МРМ…………………………………300+100
Ø дальнего МРМ………………………………….600+200
Ø дополнительного (внешнего) МРМ……….600+200
Сигнал опознавания должен быть следующий:
Ø внутренний МРМ - непрерывный сигнал без манипуляций;
Ø ближний МРМ - непрерывная последовательность чередующихся точек, передавае- мых со скоростью 6 точек в секунду;
Ø дальний МРМ - непрерывная последовательность тире, передаваемых со скоростью 2 тире в секунду;
Ø дополнительный (внешний) МРМ - непрерывная серия чередующихся точек и тире.
Передающие устройства аппаратуры должны иметь 100% резерв. Переход на резервируемую аппаратуру осуществляется автоматически по команде аппаратуры контроля МРМ.

Рис.8.Размещение маркерных радиомаяков на аэродромах ГА
Посадочный радиолокатор
Основным элементом РСП является посадочный радиолокатор, предназначенный для контроля за положением ВС, начиная со входа ВС в зону действия посадочного радиолокатора (с начала четвертого разворота прямоугольного маршрута) и до высоты 30-40 м относительно уровня ВПП.
Положение ВС определяется по отклонениям его отметки на индикаторе ПРЛ от курса посадки, номинальной глиссады и дальностью до точки приземления. Обнаруженные с помощью ПРЛ отклонения от линии курса и глиссады передаются на борт ВС по линии радиосвязи.
При использовании ПРЛ как средства управления ВС, заходящими на посадку, необходимость в дополнительном посадочном оборудовании на борту ВС отпадает, что является достоинством данной системы по сравнению с РМС. Однако точность вывода ВС в заданную точку с помощью РСП ниже, чем с помощью РМСП, поэтому при оборудовании аэродрома той и другой системами посадки заход ВС на посадку осуществляется по РМСП, а РСП используется для контроля за посадкой ВС.
Существующие в ГА предельно допустимые отклонения ВС при заходе на посадку по курсу и глиссаде используются диспетчерским персоналом при контроле за заходящим на посадку ВС табл.1.
| Д до ВПП, км | Формулы |
| По курсу ± м | ∆Км=Дкм×32 |
| По глиссаде ± м | ∆Гм=Дкм×8 |
Отклонения ВС на участке от ДПРМ до БПРМ за пределы, указанные в таблице, являются грубым отклонением – ЭВС обязан уйти на 2 й круг, а диспетчер должен дать команду об уходе на 2 й круг.
Рис.11. Вид развертки на ИКГ: ЗЛП – заданная линия пути;
ЛРО – линии равных отклонений; Ц – цель ВС.
ПРЛ является радиолокационной станцией секторного обзора, которая обеспечивает наблюдение сектора воздушного пространства с помощью курсовой и глиссадной антенны. Зона действия РЛС ограничена по азимуту углом 30°, а по углу места - 9°. Дальность действия посадочного радиолокатора составляет 20 км.
Курсовая антенна предназначена для контроля за положением ВС относительно плоскости курса, глиссадная – относительно плоскости планирования. Необходимая точность определения местоположения ВС обеспечивается применением антенн с остронаправленным излучением.
Посадочный радиолокатор состоит из трех основных частей: антенной системы, приемопередатчика и индикатора.
Принцип заключается в следующем. Излученные посадочным радиолокатором радиоимпульсы отражаются от ВС, принимаются антеннами радиолокатора и поступают в приемник. После соответствующего преобразования импульсы поступают на совмещенный индикатор курса и глиссады, где видна глиссада снижения и линия курса. Кроме отметки от ВС на экране высвечиваются линии дальности, по которым можно установить удаление ВС от торца ВПП (рис.11).
Посадочный радиолокатор рекомендуется устанавливать на траверзе ВПП на расстоянии 120-185 м от ее оси, на стороне, противоположной участку застройки и рулежным дорожкам. С места установки посадочного радиолокатора не должно быть естественных и искусственных препятствий, образующих углы закрытия более 0,5°.
| Рис.12. Размещение посадочного радиолокатора на аэродроме. |

Основные технические характеристики посадочного радиолокатора РП-3Г(РП-4Г)
Длина волны сантиметровая в пределах, см………………………………….3,2(3,5)
Режим обзора секторный
Диаграмма направленности антенны
Ø ширина в горизонтальной плоскости, град……………………………..0,8
Ø ширина в вертикальной плоскости, град………………………………..от 1 до 7(6)
Ø ширина в вертикальной плоскости, град………………………………..0,6(0,5)
Ø ширина горизонтальной плоскости, град……………………. от – 5 до + 20
Разрешающая способность на удалении на удалении до 17 км:
Разрешающая способность на удалении на удалении от 17 до 30 км, только для РП-4Г:
Точность определения координат:
Импульсная мощность передатчика, квт…………………………………………150
Радиотехнические средства посадки
Введение
Светотехнические и радиотехнические наземные средства аэропортов составляют систему обеспечения посадки воздушных судов.
Ночью и в сложных метеорологических условиях днем, когда естественные наземные ориентиры не видны, значительная роль отводится светотехническим средствам, особенно на завершающих этапах посадки (планирование, выравнивание, приземление и пробег по взлетно-посадочной полосе).
Пилот, установив визуальный контакт с землей, при помощи светотехнических средств получает информацию о положении ВС относительно ВПП (направление на ось ВПП, удаление до ВПП, плоскость горизонта, обозначение ВПП, место приземления и направление пробега после посадки).
Время, в течение которого пилот получает световую информацию, зависит от посадочной скорости воздушного судна и метеорологических условий: чем выше посадочная скорость и меньше дальность видимости световых сигналов, тем меньше времени отводится пилоту для установления визуального контакта средствами системы посадки и принятия решения.
Световые характеристики и места установки огней должны быть такими, чтобы в условиях плохой видимости пилот в зоне приближения к ВППи месту приземления ВС отчетливо видел определенное число светосигнальных огней, по расположению которых мог определить направление на ВПП и крен ВС.

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни.


Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого.

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰).
С применением приводных радиостанций и бортовых радиокомпасов появилась возможность безопасного выполнения полетов в облаках и за облаками, так как с их помощью стало возможным определять необходимое направление полета самолета. Полеты по маршрутам стали выполняться со значительно возросшей точностью и надежностью по сравнению с полетами при использовании летчиком или штурманом только счисления пути по курсу, скорости и времени полета. Привод самолета на аэродром посадки и построение предпосадочного маневра стали осуществляться без использования наземных ориентиров. Новое качественное развитие получила методика приборного пилотирования. Появление радиолокационных станций также существенно повысило безопасность полетов.
С дальнейшим развитием авиации и усложнением стоящих перед ней задач возросли требования к всепогодности ее применения. Все более и более настойчиво в качестве первоочередного выдвигалось требование к повышению точности выдерживания траектории полета, особенно при заходе на посадку, возникла необходимость автоматизации управления самолетом, оперативного управления воздушным движением и т.д. Все эти проблемы могли быть успешно решены только на основе применения качественно новой аппаратуры, такой, как радиотехническая система ближней навигации (РСБН) и системы инструментальной посадки, а также на основе комплексного использования различных типов наземной и бортовой аппаратуры навигации и посадки.
Метеоминимум (если не учитывать уровень натренированности летчика) зависит от двух основных факторов: во-первых, от того, какую точность полета по необходимой траектории обеспечивают технические средства захода на посадку, и, во-вторых, от того, каковы маневренные возможности самолета для устранения ошибки захода после установления летчиком визуального контакта с земными ориентирами и ВПП аэродрома.
Чем меньше скорость самолета при заходе на посадку, тем (в общем случае) лучше маневренность, то есть меньше радиус разворота и, следовательно, при прочих равных условиях ниже допустимый метеоминимум. Меньшая скорость обеспечивает также больший резерв времени летчику после выхода из облаков.
Однако решающее значение имеет точность системы, обеспечивающей заход на посадку.
Уже довольно давно всеобщее признание у летного состава многоместных самолетов получили достаточно точные радиотехнические системы ближней навигации РСБН-2Н и РСБН-4Н. Для обеспечения захода на посадку были созданы и внедрены курсоглиссадные системы посадки, такие, как СП-50, СП-50М, СП-68, СП-70, а в последнее время – более мобильные и менее сложные в эксплуатации системы ПРМГ-4, ПРМГ-4К, ПРМГ-4КМ и ПРМГ-5. С точки зрения летчика, воспринимающего информацию о положении своего самолета относительно линий курса и глиссады, эти системы совершенно одинаковы. Следует, однако, подчеркнуть, что системы типа ПРМГ обеспечивают летчика информацией не только о курсе и глиссаде, но и о текущей дальности до начала взлетно-посадочной полосы. Это является существенным преимуществом системы ПРМГ, ибо позволяет летчику контролировать правильность снижения самолета по глиссаде и регулировать скорость полета в зависимости от удаления до ВПП.
Радиолокационные системы типа РСП используются для обеспечения посадки самолетов, не оборудованных инструментальными системами навигации и посадки, а также в качестве средств контроля за заходящими на посадку самолетами и оказания помощи летчику.
В дальнейшем будут рассмотрены системы посадки только туда ПРМГ-4, получившие в последнее время наиболее широкое распространение.
Внедрение инструментальных систем посадки и последующая автоматизация процессов управления самолетом существенно повышают качество и надежность захода на посадку (вследствие высокой точности) и поэтому являются реальной основой снижения существующих метеоминимумов.
Поясним некоторые термины и определения общего характера, относящиеся к системам инструментальной посадки, которые необходимы для уяснения принципа действия аппаратуры. К числу таких терминов и определений относятся:
– система инструментальной посадки самолетов;
– зона действия и рабочая область системы;
– линия курса и линия глиссады.
Система инструментальной посадки самолетов – это комплекс наземного и бортового оборудования, предназначенного для обеспечения летчика, а в общем случае – бортовой системы управления непрерывной информацией о текущем положении самолета относительно линии курса, глиссады планирования и о дальности до начала ВПП.
В состав наземного оборудования системы инструментальной посадки входят:
– имитационная контрольно-поверочная аппаратура;
– аппаратура дистанционного управления работой радиомаяков с командно-диспетчерского пункта.
В состав бортового оборудования системы инструментальной посадки входят:
– бортовая приемопередающая антенна;
– приемные устройства сигналов курсового и глиссадного радиомаяков, а также ответных сигналов ретранслятора дальномера;
– стрелочные индикаторы положения с флажковыми сигнализаторами (бленкерами);
– радиодальномер со счетчиком текущей дальности.
Кроме того, в состав бортового оборудования инструментальной посадки современных самолетов входит аппаратура директорного и автоматического управления. В аппаратуре директорного и автоматического управления используются не только сигналы наземной курсоглиссадной группы, но и сигналы курсовой (КС) и воздушной (СВС) бортовых систем.
Далее будет отмечено, что при заходе самолета на посадку при любом способе управления используется также информация от радиокомпаса и указателя вертикальной скорости.
Таким образом, система инструментальной посадки самолетов состоит из разнообразного наземного и бортового оборудования, предназначенного для обеспечения успешной посадки самолета.
Зона действия системы инструментальной посадки – это область пространства перед взлетно-посадочной полосой, в которой сигналы радиомаяков содержат информацию о положении самолета относительно линии курса и глиссады снижения. Зона действия определяется дальностью приема сигналов радиомаяков и ее угловыми размерами в горизонтальной и вертикальной плоскостях относительно оси ВПП. Хотя зона действия зависит от конструктивных и электрических характеристик радиомаяка (курсового и глиссадного) и от общей, и угловой чувствительности бортовых приемных устройств, ее считают характеристикой наземного оборудования. Объясняется это тем, что при измерениях зоны действия параметры бортового оборудования приводится к вполне определенным стандартизированным значениям.
Наземным оборудованием в пространстве создаются:
– зона действия курсового радиомаяка;
– зона действия глиссадного радиомаяка;
– зона действия ретранслятора дальномера.

На рис. 1 показаны зоны действия курсового а и глиссадного б радиомаяков в вертикальной и горизонтальной плоскостях.
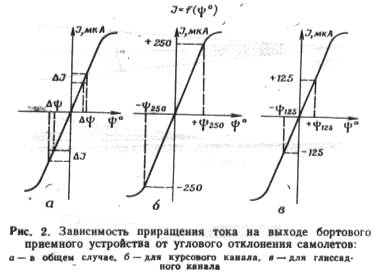
Р а б о ч а я о б л а с т ь с и с т е м ы инструментальной посадки – это центральная область пространства внутри зоны действия, ограниченная телесным углом, в котором с заданной точностью обеспечивается пропорциональная (линейная) зависимость между отклонениями самолета от линий курса и глиссады и выходными токами бортовых приемных устройств (рис. 2, а).
Рабочая область системы независимо от места установки маяка относительно ВПП и направления ее оси исчисляется от торца ВПП в сторону, откуда выполняется заход самолета на посадку.
За пределами рабочей области системы, но в границах зоны ее действия существует нелинейная, с сохранением знака (стороны отклонения), зависимость между выходными токами I и отклонением самолета j от линий курса и глиссады.
Для дальномерного канала зона действия в вертикальной плоскости определяется диаграммой направленности антенны ретранслятора дальномера, по дальности зона действия определяется мощностью излучения.
Крутизна характеристики – один из важнейших параметров систем инструментальной посадки – определяется скоростью нарастания выходного тока бортового приемника в зависимости от величины отклонения самолета от линии курса или глиссады. Крутизна характеристики системы S зависит от крутизны характеристик радиомаяка и приемного устройства. Крутизна характеристики численно выражается отношением приращения тока на выходе бортового приемного устройства DI к приращению углового отклонения самолета от линии курса или глиссады планирования Dj в мкА/град:
С достаточной для практической работы точностью численное значение крутизны находят на определенном участке характеристики.
Для курсового канала на участке изменения тока от 0 до ±250 мкА (рис. 2, б):
где, I0±250 – ток на выходе курсового приемника, равный 250 мкА;
j 0 250 – угол отклонения самолета от равносигнального направления, соответствующий этим значениям тока.
Для глиссадного канала на участке изменения тока от 0 до ±125 мкА (рис. 2, в):
где I0±125 – ток на выходе глиссадного приемника, равный 125 мкА.
Если характеристика I=f(j) достаточно линейна, то расчет по формулам и дает приблизительно равные значения крутизны.
Отличия участков изменения тока, на которых определяется крутизна для курсового (0±250) и глиссадного (0±125) каналов, обусловлены тем, что в режимах полуавтоматического и автоматического управления характеристики по каналу глиссады используются до значений тока 125 мкА, а по каналу курса – до 250 мкА.
Крутизна характеристики во многом определяет точностные возможности системы инструментальной посадки. Чем выше крутизна, тем чувствительнее к угловым отклонениям самолета система и тем больший ток будет на выходе приемного устройства. Чем быстрее будет нарастать ток на выходе приемного устройства при отклонении самолета, тем активнее и точнее управляющая система будет устранять эти отклонения.
Л и н и я к у р с а, или л и н и я г л и с с а д ы, в системе инструментальной посадки – это геометрическое место таких точек в центре рабочей области системы, где выходной ток бортовых приемных устройств равен нулю.
Система инструментальной посадки устроена таким образом, что равносигнальная плоскость курса совпадает с продолжением оси ВПП, а равносигнальная плоскость глиссады для большинства аэродромов составляет с горизонтом угол, равный 2,7°.
Катастрофа в августе 1997 г. самолета Boeing-747, выполнявшего заход на посадку по неточной системе посадки (non-precision) ночью в сложных метеоусловиях на ВПП 06L международного аэропорта Гуама, еще раз подтвердила важность для безопасности полетов обеспечения аэропортов системами посадки требующейся точности наведения при заходе на посадку и посадке. Окончательные результаты расследования катастрофы к концу 1997 г. еще не были получены, но по предварительному заключению ее причиной является недостаточная точность наведения глиссадным маяком системы ILS. Заход на посадку выполнялся по процедуре, не предназначенной для тяжелых транспортных самолетов. Глиссада точного захода на посадку по системе ILS на ВПП 06L и глиссада ступенчатого снижения при заходе на посадку по процедуре non-precision, то есть когда управление по высоте глиссады осуществляется по показаниям бортового высотомера, существенно различаются (табл. 1). Наведение по курсу осуществлялось курсовым маяком ILS, и Boeing-747 был выведен точно по посадочному курсу, но из-за ошибки по высоте столкнулся с землей в районе ближнего привода, не долетев до кромки ВПП примерно 5, 6 км.
На трассе и при неточном заходе на посадку
Точный заход на посадку по категории I ICAO
Точность определения МС 100 м
Время предупреждения об отказе
Надежность работы системы
Высота полета определяется по Бортовому высотомеру
Точность определения МС 7, 6 м
Время предупреждения об отказе
Надежность работы системы
Точность определения высоты глиссады 7, 6 м
Для исключения подобных авиационных происшествий (АП) необходимо выполнить решение ICAO, принятое в 1978 г. о необходимости установки в аэропортах соответствующую требованиям систему ILS или микроволновую систему посадки MLS. Однако в настоящее время имеется четыре типа систем автоматической посадки отвечающих требованиям ICAO и авиационные специалисты должны выбрать одну из них. Это системы ILS, MLS и две совершенно различные спутниковые системы автоматической посадки. Все четыре системы отвечают требованиям ICAO к системам автоматической посадки для XXI века. Сроки ввода в эксплуатацию и сертификации систем автоматической посадки приведены в табл. 2.
Таблица 2
Сроки ввода в эксплуатацию и сертификации систем автоматической посадки
Категория сложности ICAO
Фактические/оценочные сроки сертификации
Категории I, II, III
"Близко к категории I “
Факторы, влияющие на выбор системы посадки (погодные условия) районе аэропорта, частота посадок и взлетов, стоимость захода на посадку и взлета), действуют совместно. Выбор типа системы определяет высоту принятия решения* to есть точки на глиссаде, в которой пилот должен принять решение о прекращении снижения и уходе на повторный заход, если ВПП не видна. Для аэропортов с хорошей погодой достаточна система, отвечающая требованиям I категории ICAO, для стран северо-западной части Европы необходима система, отвечающая требованиям III ICAO.
В настоящее время система ILS, являющаяся стандартом ICAO, установлена во всех международных и большинстве региональных аэропортов. Однако характерные для нее недостатки (например, интерференция от радиостанций, работающих на близких частотах или от высотных зданий) расположённых вблизи аэропорта, или от находящихся в воздухе больших ВС) иногда приводят к искажению луча курсового маяка. По этой и другим причинам ICAO в 1970 г. одобрила систему MLS, которая не подвержена недостаткам системы ILS. Примерно через 10 лет было предложено использовать в системах автоматической посадки дифференциальную глобальную спутниковую навигационную систему DGPS. В 1995 г. ICAO приняла компромиссное решение, по которому система ILS может использоваться до 2015 г.; система MLS должна быть установлена там, где это вызвано условиями эксплуатации воздушного транспорта. Система DGPS дает возможность использовать два варианта автоматической посадки, полностью отвечающие требованиям точности при заходе на посадку и посадке по I категории ICAO.
Система LAAS (система наведения для местного региона) является наземной системой, непрерывно сравнивающей отраженный сигнал DGPS с посланным ею, определяющей рассогласование и передающей его на борт ВС, выполняющего заход на посадку. Ошибка наведения системы не превышает 7 м. Несколько первых систем этого типа, известных как Scat-1 (система посадки специальной категории I), находятся в эксплуатации как приватно финансируемые системы не для общего пользования. FAA разрабатывает спецификацию и требования к системе LAAS для общего пользования, которая должна поступить в эксплуатацию с 2005г. Не дожидаясь утверждения стандарта на систему, несколько фирм производят вариант системы Scat-1. Среди них фирма Honey well, система Scat-1 которой сертифицирована и установлена в аэропортах Миннеаполис и Ньюарк (в последнем —для авиакомпании Continental Airlines). Ожидается сертификация системы Scat-1 в Канаде, Индонезии и Австралии. В Российской Федерации система Scat-1 фирмы Honeywell с помощью Научно-производственного предприятия АВИТЕКС (Москва) будет устанавливаться на самолеты гражданской авиации. Несколько других производящих эту систему фирм (Raytheon, Wilcox, DASA-NFS, Interstate Electronics) ожидают сертификации установленных в некоторых аэропортах (Флорида в США, Бодо в Норвегии) систем Scat-1, заключают контракты на поставку системы и ожидают от FAA сертификации системы для общего пользования. Для обеспечения широкого использования спутниковой навигационной системы DGPS сеть ее наземных станции должна быть увеличена; потребуется коррекция линий передачи данных спутник—наземные станции и запуск геостационарного спутника с экваториальной орбитой. Для такого варианта спутниковой системы FAA разрабатывает систему автоматической посадки WAAS (система наведения для большой площади перекрытия). Создаваемые в Европе система EGNOS (Европейская спутниковая геостационарная навигационная система большой площади перекрытия) и японская система MTSAS (многоцелевая спутниковая система наведения) подобны системе WAAS.
К 2001-2002 гг. FAA планирует сертифицировать систему WAAS по условиям, близким к требованиям I категории ICAO (высота принятия решения 90-120 м). В процессе дальнейших испытаний FAA надеется сертифицировать систему WAAS по полным условиям I категории ICAO (высота принятия решения 60 м). В более поздние сроки (см. табл. 1). FAA планирует сертифицировать систему WAAS для требований II и III категорий ICAO, однако имеются две причины, которые препятствуют этому: первая — при длительных трассах сигналы геостационарного спутника могут быть искажены ионосферным эффектом, то есть может возникнуть ошибка в координатах положения объекта, вторая причина —система WAAS может обеспечить предупреждение об отказе за время не более 6 с, что требуется I категорией ICAO, тогда как по условиям требований II и III категорий это время не должно превышать 2 с.
В США утверждена специальная программа замены системы ILS на систему с использованием DGPS. FAA планирует проверить состояние около 1000 систем ILS и заменить их на систему LAAS I категории ICAO. Это произойдет после того как будет сертифицирована система LAAS I категории, то есть в 2005 г. Стратегия замены еще не разработана, однако система LAAS I категории ICAO может быть приобретена аэропортами в частном порядке. Если такая схема сработает, то процесс замены системы ILS на LAAS I категории затянется на много лет.
Необходимость оборудовать самолет для работы с четырьмя различными системами автоматической посадки привела к созданию авиационными фирмами многорежимного приемника (MMR). С его помощью пилот в полете выбирает систему посадки конкретного аэропорта и выполняет заход на посадку и посадку по процедуре системы ILS. На последних сериях самолетов фирм Boeing и Airbus устанавливаются MMR, кроме того для замены старого оборудования самолетов предшествующих серий используются цифровые и аналоговые блоки. Фирма Rockwell получила заказов от авиакомпаний на 3000 приемников MMR. в том числе от авиакомпаний British Airways, United Airlines и Continental Airlines.
ПЛАНЫ УСТАНОВКИ МИКРОВОЛНОВОЙ СИСТЕМЫ АВТОМАТИЧЕСКОЙ ПОСАДКИ В АЭРОПОРТАХ ЕВРОПЫ
Национальный комитет по управлению воздушным движением Великобритании (NATS) планирует установить в основных аэропортах страны микроволновую систему автоматической посадки (MLS). Объявлены тендеры на поставку и установку систем в четырех аэропортах:
две системы для взлетно-посадочных полос (ВПП) аэропорта Хитроу и две — для ВПП аэропорта Гатвик, а также на получение прав замены посадочных систем в 16 других аэропортах страны. Системы MLS в аэропортах Хитроу и Гатвик должны быть установлены и приняты к эксплуатации к 2000 г. Требования к промышленности на системы для замены эксплуатируемых систем ILS в других 16 аэропортах еще не согласованы. Все 22 системы MLS, которые планируется установить, соответствуют принятым для ВС гражданской авиации международным стандартам III — категории ICAO, то есть обеспечивают заход на посадку и посадку в условиях горизонтальной видимости вдоль ВПП (RVR) менее 200 м. При таких условиях пилот непрерывно докладывает, что он видит ВПП вплоть до касания ВПП колесами шасси.
В настоящее время заход на посадку и посадка в сложных условиях при пониженной RVR осуществляется по системе ILS. ILS для посадки при пониженном минимуме используется на мировом уровне, но наиболее часто — в Великобритании и Западной Европе. Во всем мире более 2500 ВПП оборудовано системой ILS, но только 90 из них сертифицировано для посадки по III категории сложности, причем около 2/3 установлено в Европе. ILS обеспечивает заход на посадку при RVR не меньше 550 м. а в некоторых случаях даже не меньше 300 м. При более низкой видимости посадка ВС либо задерживается до улучшения погоды, либо он отправляется в запасной аэропорт.
Решение NATS об установке систем MLS не является неожиданным, так как NATS в течение многих лет поддерживал промышленность, разрабатывающую MLS , и в 1997 г. установил для ВПП-27R аэропорта Хитроу MLS категории III фирмы Siemens-Plessey. Однако NATS заявил, что следующим очередным и вероятно логическим шагом на пути обеспечения всепогодной посадки ВС будет являться использование систем посадки, основанных на спутниковой технологии.
Ниже перечислены три основные причины, обосновывающие переход NATS на систему MLS.
1. Присущие ILS ограничения на посадки ВС при метеорологическом минимуме ниже установленного и частоту посадок на ВПП препятствуют потребностям возрастающего объема воздушного движения. Временной интервал между садящимеся и взлетающими ВС не может быть меньше определенного, так как при его сокращении радиолучи посадочных маяков могут быть искажены взлетающим ВС и находящимся над передатчиком ILS или ВС, находящимся на финальной стадии захода на посадку. Для исключения этого дистанция между садящимися по системе ILS ВС должна быть увеличена, что, в свою очередь, приводит к снижению частоты посадок. В настоящее время ведущие авиакомпании сертифицированы для посадки своих ВС в условиях категории III, а это требует увеличения пропускной способности аэропортов, то есть снятия любых ограничений, препятствующих этому. В отличие от ILS луч наведения системы MLS не подвержен искажениям от пролетающих ВС, что позволяет обеспе-, чить такую же дистанцию между заходящими на посадку ВС, как при визуальном заходе.
2. "Защищенный" для системы ILS частотный диапазон 112-118 МГц все в большей степени подвергается интерференции на концах диапазона от мощных коммерческих радиовещательных станций, частных радиостанций, не лицензированных экспериментов и других источников. Хотя NATS принимает существенные усилия для обеспечения реальной защиты установленного для системы ILS диапазона, гарантировать полностью такую защиту после 2000 г. невозможно. Для частотного диапазона системы MLS 5000 МГц источников помех значительно меньше.
3. Хотя система посадки с использованием спутниковой технологии прогнозируется как система будущего, но сказать определенно, когда она будет сертифицирована для гражданского пассажирского транспорта при перевозках в условиях пониженного метеорологического минимума, затруднительно. Наиболее вероятной датой является 2010-2015 гг. и даже более поздний срок.
Авиационные специалисты Дании, основываясь на общих мнениях со специалистами Великобритании, устанавливают две системы посадки MLS категории III ICAO в аэропорту Амстердама Шипхол, в дальнейшем будут установлены еще четыре MLS для ВПП, оборудованных системами ILS. Для аэропорта Шипхол установка MLS особенно важна, так как в отличие от ILS она не подвержена влиянию помех от высотных зданий вблизи аэропорта ("раздвоение" посадочного курса). Система ILS не может отличить фальшивый посадочный курс от действительного, что делает заход на посадку при пониженной видимости опасным.
Инициатива Великобритании и Дании по установке в своих аэропортах системы MLS тщательно изучается авиакомпаниями Европы, использующими посадки ВС в своих аэропортах по системе ILS, но в условиях пониженного минимума. Мнение авиационных специалистов по дальнейшей установке системы MLS в аэропортах Европы оптимистично.
Читайте также: