
Основные понятия и определения автоматики реферат
Обновлено: 05.07.2024
Разделы и темы соответствуют рабочей программе, разработанной в 2005г.
Пособие необходимо использовать совместно с альбомом чертежей и схем.
Требуется отметить, что данный конспект лекций не освобождает студентов от
изучения предлагаемых преподавателем литературных источников.
Преподаватель имеет право некоторые разделы и главы изменять по своему
Автоматика – это отрасль н ауки и техник и об управлении различными
процессами и контроле их протекания, осуществляемыми без непосредственного
Современное производство – непрерывное поточное производство, высокая
скорость протекания процесс ов. Все это тре бует быстродействия, точност и и
объективности управления т управлять такими процессами для человека становиться
В ряде отраслей появились процессы (радиоактивный распад, электромагнитные
излучения, сверхнизкие и сверхвысокие температуры и т.п.), т .е. вредные
Кроме этого, на производстве еще достаточно много тяжелого ручного труда,
который надо заменить на более легкий. Именно автоматизация технологических
процессов позволяет выполнить задачи по защите человека и облегчения его труда.
- механизация – замена ручного труда энергией машин, при этом функции
- автоматизация – замена функций управления технологическими
процессами и контроль за их протеканием без участия человека.
В зависимости от характера и объема операций, выполняемых автоматическими
устройствами (совокупн остью устройств) различают следующие виды
Системы контроля служат для автоматического получения и обработки
информации о значениях контролируемых параметров. Конт роль может быть
Системы блокировки служат для фиксации механизма или уст ройства в
определенном положении в процессе их работы. Эти системы увеличивают
безопасность обслуживания и надежности работы оборудования.
Системы защиты прекращают технологический процесс при возникновении
отклонений контролируемых параметров при перегрузках, коротких замыканиях и
Системы сигнализации извещают персонал о ходе технологического процесса
при возможных допустимых отклонениях контролируемых параметров за
Системы регулиров ания обеспечивают поддержани е значений регулируемой
величины (параметра) в заданных пределах или по заданному закону.

Все эти системы могут быть самостоятельными или являться составной частью
Системы управления – это автоматические системы, в которых технологический
процесс или какой – либо объект управляются с помощью управляющих сигналов.
Любая автоматическая система состоит из отдельных, связанных между собой
ОУ - Объект (контроля, регулирования, управления и т.п.) –– устройство или
совокупность устройств, у которых регулируются, контролируются или управляются
УУ – Устройство управления (управляющее устройство) – техническое
устройство, воздействующее на объект управления в соответствии с программой
ИУ – Исполнительное устройство создает управляющее воздействие на объект
ЗУ – Задающ ее устройство (элемент настройки) – служит для задания
Д – Датчик (воспринимающее устройство, первичный преобразователь, датчик
обратной связи) – измеряет управляемые величины и, при необходимости,
преобразует их в другие, для удобства передачи, обработки или хранения
СУ – Сравнивающее устройство – сравнивает заданное значение регулируемой
величины с ее действительным значением на выходе объекта управления.
Полученная разность сигналов называется сигналом рассогласования или сигналом
Вспомогательные устройства – переключают, защищают, сигнализируют,
усиливают элемент ы схемы и сигналы в них для улучшения качества процесса
Любой процесс управления в каждый элемент в ремени характеризуется одним
или несколькими показателями, которые отражают физическое состояние объекта

(температура, давление, напряжение и т.п.). Эти показатели могут изменяться по
определенному закону (алгоритму) или оставаться постоянной. Такие показатели
называются регулируемыми параметрами управляемого процесса.
задающие воздействия управляющие воздействия возмущающие воздействия
Для нормального (заданного) протекания технологического процесса на вход
системы автоматики по определенному алгоритму подаются задающие (внешние)
Для выполнения функции управления между УУ и ОУ действуют управляющие
Однако в реальных системах на объект могут действовать заранее не
планируемые воздействия (помехи), которые затрудняют процесс управления. Они
называются возмущающими воздействи ями. Иногда на один объект может
Для возможности контроля параметров объекта управления и для улучшения
характеристик систем автоматики предусматривают линии обратной связи .
Линии обратной связи – это линии св язи, по которым информация передается в
обратном направлении по сравнению с управляющими воздействиями.
В автоматических системах используются следующие виды обратной связи:
- положительная обратная связь – знак сигнала обратной св язи и
- отрицательная обратная связь - знак сигнала обратной связи и задающего
- жесткая обратная связь - передаваемое воздействие зависит только от
регулируемого параметра и не зависит от времени (работает постоянно);
- гибкая обратная связь – действует только в переходном периоде, т.е.
существует только тогда, когда управляемая величина изменяется во
- главная обратная связь – соединяет выход системы автоматики с ее
входом, т.е. связывает управляемую величину с задающей величиной от
- дополнительная обратн ая связь – передает сигнал в оздействия с выхода
какого-либо э лемента си стемы (например, усилителя) на вход лю бого
предыдущего элемента для улучшения характеристики отдельных

Тема 1.3 Основные характеристики элементов систем автоматики
Системы автоматики состоят из ряда связанных между собой элементов. Каждый
элемент имеет свои физические свойст ва, которые определяются рядом
В зависимости от характеристик элементов вся система также будет обладать
своей характеристикой. Поэтому, зная характеристики отдельных элементов
системы, мы сможем представить, как будет работать данная система.
Режим работы элемента (системы) при постоянных во времени входной и
выходной величинах называют статическим (установившимся) режимом , т.е. в
Для э лементов ав томатики основным является режим работы, при котором Х
не остаются постоянными. Такой режим работы называется динамическим .
Процесс перехода из одного установившегося состояния в другое
установившееся состояние называется переходным процессом . Он является частным
Для оценки работы системы ав томатики в переходом процессе служат
Переходная характеристика – это временная характеристика, показывающая
Эта характери стика дает возможность определить, как поведет себя система
автоматики (элемент) при любом воздействии на ее вход.
Передаточная характеристика показывает зависимость изменения во времени
нулевых начальных условиях . Нулевые начальные условия – перед началом работы
Частотные характеристики – показывает изменение входной величины Х
Коэффициент передачи элемента – представляет собой отношение выходной
котором определяется коэффициент передачи элемента, различают:
Динамический коэффициент передачи – показывает во сколько раз приращение

Относительный коэ ффициент передачи показывает отношение относительного
Порог чувствительности это наименьшее (по абсолютному значению) значение
входного сигнала, способное в ызвать изменение в ыходного сигнала. Ин тервал
между значением в ходного сигнала, не оказывающего воздействия на значение
выходного сигнала, и значением входного сигнала, оказывающего воздействие на
значение выходного сигнала, называется зоной чувствительности.
В системах автоматики датчик предназначен для измерения и преобразования
контролируемой или регулируемой величины объекта в выходной сигнал, более
удобный для дальнейшего движения информации, ее хранения и обработки.
Поэтому датчики нередко называют первичными преобразователями .
Датчики являются наиболее широк о распространенными элемент ами л юбой
Условия работы датчиков, как правило, более тяжелые, ч ем у ост альных
элементов, т.к. они расположены непосредственно на объекте управления и
подвергаются воздействию агрессивных сред, ударов, вибрации и т.п. В этих
условиях к датчикам предъявляются жесткие требования по точности и стабильности
В зависимости от принципа действия датчики делятся на:
Параметрические (модулят оры) – это такие датчики, у которых измен ение
входной величины датчика вызывает изменение какого – либо параметра самого
Генераторными называются такие датчики, у которых изменение входной
величины датчика вызывает ген ерацию (появление, создание) электрического

сигнала на его выходе. Эти датчики не требуют вспомогательного источника
Аналоговые датчики это такие датчики, у которых либо входной сигнал, либо
сигнал на выходе, либо оба сигнала являются аналоговым.
У дискретных датчиков оба сигнала, или хотя бы один сигнал на входе или на
выходе является дискретным (импульсным, цифровым и т.п.)
Линейные датчики – выходная в еличина изменяется пропорционально
Нелинейные датчики – выходная величина изменяется нелинейно относительно
Для подключения датчиков в системы автоматики используются следующие
Схема используется для преобразования изменения параметров датчика ( R , L, C)
Мостовой называется схема, которая состоит из четырех и более плеч ( Z1, Z2, Z3,
Z4) и двух диагоналей – питания (ac) и измерительной (bd).
Если Z1 * Z3 = Z2 * Z4, то мостовая схема называется уравновешенной и ток по
измерительной диагонали не течет (РА = 0). Если равенство не выполняется, то по
Датчик устанавливается в одно из плеч мостовой схемы (например, Z1).
В системах автоматики применяют два вида мостовых схем включения датчиков:
Балансная схема предусматривает нулевой метод измерения – по измерительной
диагонали ток не течет. Такая схема чаще применяется в системах управления, т.к.
при изменении параметра датчика (Z1) необходимо изменить сопротивление любого
из плеч, чтобы ток в измерительной цепи не протекал.
Неравновесная схема – это такая схема, у которой при изменении параметра
датчика по измерительной диагонали течет ток, величина которого пропорциональна
этому изменению. Такие схемы часто применяются в схемах автоматиче ского
Принцип компенсации заключается в том, что измеряемую эдс (или напряжение),
поступающую от датчика, уравновешивают равным и противоположным по знаку
падением напряжения, значение которого известно с высокой точностью.
Исследуемое напряжение (с датчика) подается на вход схемы U
Подвижная система гальванометра (PG) имеет вместо стрелки контакт SA,
который при появлении тока в гальванометре и в зависимости от его направления
замыкается вверх или вниз. При э том включается электродвигатель М и
гальванометре не станет равной нулю. Контакты SA устан овятся в среднее
положение, двигатель остановиться и движок реохорда останется в положении,
Движок реохорда можно соединить с указателем, показывающим на шкале
Схема представляет собой электрическую цепь, состоящую из двух смежных
контуров, в каждом из которых действует отдельная эдс. Измерительный прибор Р
включен в общую для обоих контуров цепь и реагирует на разность контурных
В автоматических системах могут быть использованы следующие режимы
а) при неизменных сопротивлениях обоих контуров одна из Е изменяется на
б) при неизменных сопротивлениях обоих контуров обе Е
Достоинство этих схем: чувствительность по току при большом сопротивлении
Преобразуют перемещение чувствительного элемента (подвижного контакта) в
изменение электрического сопротивления самого датчика (рис.6)
- с угловым перемещением (кольцевые и секторные) – рис.6б и 6в;
В зависимости от конструкции реохорда датчики могут быть:
- линейными – выходная величина датчика пропорциональна входной
величине, т.к. сечение каркаса датчика, диаметр проволоки, шаг намотки
- функциональными – обладают нелинейной характеристикой, т.к. каркас,
шаг намотки или диаметр проволоки по длине датчика не одинаковы (с.8,
Принцип действия индуктивных датчиков основан на зависимости индуктивного
- изменения зазора в магнитопроводе (рис.8а) – перемещение до 2мм;
- перемещения магнитопровода в катушке (рис. 8б) – перемещение до 50мм;
- изменения площади зазора между катушкой и сердечником (рис.8в) –
- влияние колебаний амплитуды и частоты напряжения питания;
Трансформаторный датчик (индуктивный преобразователь)
Трансформаторные датчики имеют на своем выходе взаимоиндуктивность и
поэтому они относятся к группе индуктивных датчиков.
Катушка датчика (с.2, рис 9) изготовлена в виде рамки, пронизываемой
переменным магнитным потоком, который создается обмоткой возбуждения,
подключенной к источнику стабилизированного напряжения стандартной частоты.
При повороте катушки изменяется значение пронизывающего ее магнитного потока,
а, следовательно, и индуктированной эдс. С помощью формы полюсных
наконечников можно получить прямолинейную статическую характеристику при
. Соединяя механической связью ось рамки с осью стрелки
показывающего прибора, можно преобразовать поворот рамки в показания прибора.
Автоматика – отрасль науки и техники, которая охватывает теорию автоматического управления, а также принципы построения автоматических систем и технические средства, для реализации этих систем.
Автоматизация - применение технических средств, экономическо-математических методов и систем управления, освобождающих человека полностью или частично от непосредственного участия в процессе получения, преобразования, передачи и использования энергии, материалов или информации.
С/х производству присущи свои специфические особе6нности, которые следует учитывать при автоматизации:
1. цикличный, прерывистый характер производства
2. невозможность сбоев;
3. надежность используемых средств автоматизации;
4. невозможность увеличить выход продукции, уменьшив время и число циклов;
5. наличие существенных и продолжительных вибраций в мобильной технике;
6. большое количество объектов с агрессивными, влажными и запыленными средами;
7. рассосредоточенность с/х машин и установок по огромным площадям, а также удаленность их от ремонтных баз.
В зависимости от функций, выполняемых специальными автоматическими устройствами различают следующие виды автоматизации:
1. Автоматический контроль (автоматическая сигнализация, автоматические измерения, автоматическая сортировка, автоматический сбор информации);
2. Автоматическая защита (релейная защита, автоблокировка);
3. Дистанционное управление (дистанционное управление, телемеханика);
4. Автоматическое регулирование и автоматическое управление (САУ, САР);
5. Автоматизированное управление (автоматизированные системы управления технологическими процессами, системы автоматизированного проектирования, автоматизированные системы сбора экономической информации)
По степени автоматизации производственных процессов различают:
1. частичная автоматизация;
2. комплексная автоматизация;
3. полная автоматизация.
Чем качественней автоматизация, тем меньше сибестоимость продукции, тем больше ее выпуск и и выше доход.
Любой технологический процесс характеризуется физическими величинами, называемыми показателями процесса. Для одних процессов показатели могут быть постоянными, для других же допускается их изменение в заданных пределах по определенному закону.
Совокупность предписаний, ведущих к правильному выполнению технологического процесса в каком-либо устройстве или ряде устройств, выполняющий один и тот же технологический процесс называется алгоритмом (законом) функционирования устройства или системы.
Устройства или совокупность устройств, осуществляющих тот или иной технологический процесс, которые нуждаются в оказании специально организованных командах извне для выполнения алгоритма функционирования называются объектом управления (ОУ).
Каждый ОУ должен иметь устройство, называемое управляющим органом, при изменении положения или состояния которого, показатели процесса будут изменяться в заданных пределах или заданных направлениях. Через управляющий орган в ОУ поступают воздействия, которые позволяют осуществлять заданный алгоритм функционирования.
Совокупность предписаний, определяющая характер воздействий извне на управляемый объект с целью управления или заданного (предписанного) алгоритма функционирования называется алгоритмом управления. Физические показатели процесса или объекта, которые преднамеренно изменяются, или сохраняются неизменными в процессе управления называются управляемыми (регулируемыми) величинами или координатами. Обычно управляемые величины в объектах управления характеризуют качественные показатели процесса. Поэтому управлять объектом – это значит создавать условия, при которых качественные показатели изменялись бы по требуемому закону с определенной точностью, независимо от действующих на объект внешних условий.
Управление – это преднамеренное воздействие на объект управления, обеспечивающее достижение определенных самим технологическим процессом целей.
Если управление осуществляется без непосредственного участия человека, то оно называется автоматическим, а если с участием, то ручным.
Автоматическим управляющим устройством (АУУ) называют техническое устройство, осуществляющее воздействие на объект управления, в соответствии с заложенным в нем алгоритмом управления. АУУ воздействует на ОУ через орган управления. Совокупность ОУ и АУУ взаимодействующих между собой, в соответствии с алгоритмом управления называют системой автоматического управления (САУ).
Из всех операций управления ТП объединенных определением САУ наибольший интерес для практических целей представляют операции по поддержанию или изменению показателей процесса.
Такого рода операций получили название процесса регулирования. Техническое устройство, предназначенное для автоматического поддержания постоянного значения показателей процесса регулирования или изменения этих показателей по какому-либо требуемому закону называют автоматическим регулятором (АР). Совокупность ОР с АР называют системой автоматического регулирования (САР).
Автоматика - это отрасль науки и техники, изучающая теорию и принципы построения систем управления объектами, функционирующими без непосредственного участия человека.
Объектом управления ОУ называют техническое устройство, для достижения желаемых результатов функционирования которого необходимы специально организованные воздействия. Объектами управления могут быть технические объекты (теплицы, теплогенераторы и т.д.), технологические объекты, экономические системы, социальные системы.
Причиной управления является достигаемая цель управления. Под целью управления понимают изменение во времени значений координат объекта управления, при которых достигается желаемый результат его функционирования.
Цели управления могут быть различными. В простейших случаях цель может состоять в обеспечении постоянства выходной координаты объекта управления и представлять собой легко измеряемую физическую величину. Например, постоянство температуры, влажности и т.п. В более сложных случаях цель управления может состоять в одновременном связанном регулировании сразу нескольких выходных координат объекта, причем некоторые координаты могут технологическими, экономическими и другими параметрами функционирования объекта. Например, минимум затрат энергии на осуществление процесса, минимум себестоимости продукции, максимум производительности и т.п.
В зависимости от количества целей управления различают одноцелевые и многоцелевые объекты.
Качество функционирования объекта управления оценивают по его выходной величине, которую называют управляемой величиной Y(t). По ее изменению во времени оценивают степень достижения цели управления. Наиболее простым показателем качества управления является отклонение выходной координаты объекта от желаемого значения.
ОУ находится под непрерывным воздействием внешних возмущающих воздействий F(t), стремящихся изменить состояние объекта и отклонить управляемую величину Y(t) от желаемого значения X0.
Для управления объектом, необходимо иметь регулирующий орган РО, при помощи которого возможно менять состояние объекта, т.е. влиять на его управляемую величину Y(t). Воздействие регулирующего органа на объект управления называется входным или управляющим воздействием U(t).
Управление объектом - это преднамеренное воздействие на него, обеспечивающее достижение заданного значения управляемой величины. Управление может быть ручным и автоматическим.
Ручное управление

Структурная схема ручного управления показана на рисунке.
При таком управлении оператор измеряет текущее значение регулируемой величины Y(t), сравнивает его с заданным значением X0 и в зависимости от рассогласования ?(t)=Y(t) - X0 перемещает регулирующий орган РО, меняя управляющее воздействие U(t) на объект управления.
Недостатками ручного управления являются:
- оператор не в состоянии непрерывно наблюдать за технологическим процессом, следовательно, возможны опоздания в процессе регулирования и, как следствие, отклонение управляемой величины Y(t) от желаемого значения;
- оператор сам определяет как величину, так и закон перестановки регулирующего органа, а значит, возможны ошибки, которые зависят от опытности оператора.
Таким образом, ручное управление сопряжено со значительными ошибками регулирования.
Чтобы ошибки регулирования не привели к браку продукции оператор вынужден поддерживать режимные параметры процесса, как правило, ниже максимально допустимых значений, что приводит к снижению интенсивности протекания процесса и производительности оборудования. В противном случае (например, при перегреве семенного зерна) возможен массовый брак продукции и значительный экономический ущерб.
Автоматическое регулирование

Структурная схема системы автоматического регулирования приведена на рисунке.
Система работает следующим образом. Сигнал с выхода объекта управления ОУ, измеренный измерительным элементом (датчиком) ИЭ, поступает в сравнивающий элемент СЭ, где он сравнивается с желаемым значением X0 управляемой величины. Сигнал рассогласования ?(t)=Y(t)-X0 поступает в регулятор Р, который в зависимости от значения и знака рассогласования вырабатывает управляющий сигнал U(t), под действием которого регулирующий орган РО изменяет поток энергии или вещества в объект управления ОУ, тем самым изменяя его управляемую величину Y(t).
Таким образом, при отклонении регулируемой величины от заданного значения в системе автоматически появляется управляющее воздействие устраняющее это отклонение.
Регулятором называют устройство, осуществляющее воздействие на управляемый объект в соответствии с заложенным в нем алгоритмом управления.
Совокупность объекта управления и автоматического регулятора называют системой автоматического регулирования САР.
Важно отметить, что принципы построения систем автоматического управления остаются одинаковыми независимо от природы регулируемой величины и конструктивного исполнения регуляторов.
Системы автоматики: системы автоматического контроля, управления и регулирования

Все элементы автоматики по характеру и объему выполняемых операций подразделяют на системы: автоматического контроля, автоматического управления, автоматического регулирования.
Система автоматического контроля (рис. 1) предназначена для контроля за ходом какого-либо процесса. Такая система включает датчик В, усилитель А, принимающий сигнал от датчика и передающий его после усиления на специальный элемент Р, который реализует заключительную операцию автоматического контроля — представление контролируемой величины в форме, удобной для наблюдения или регистрации.
В частном случае в качестве исполнительного элемента Р могут служить сигнальные лампы или звуковые сигнализаторы. Систему с такими элементами называют системой сигнализации .

Рис. 1. Система автоматического контроля
В систему автоматического контроля кроме указанных на рис. 1, а могут входить и другие элементы - стабилизаторы, источники питания, распределители (при наличии нескольких точек контроля или нескольких датчиков в одном исполнительном элементе Р) и т. д.
Независимо от количества элементов системы автоматического контроля являются разомкнутыми и сигнал в них проходит только в одном направлении — от объекта контроля Е к исполнительному элементу Р.
Система автоматического управления предназначена для частичного или полного (без участия человека) управления объектом либо технологическим процессом. Эти системы широко применяют для автоматизации, например, процессов пуска, регулирования частоты вращения и реверсирования электродвигателей в электроприводах всех назначений.
Необходимо указать на такую важную разновидность систем автоматического управления, как системы автоматической защиты , которые не допускают аварийного или предельного режима, прерывая в критический момент контролируемый процесс.

Система автоматического регулирования поддерживает регулируемую величину в заданных пределах. Это наиболее сложные системы автоматики, объединяющие функции автоматического контроля и управления. Составная часть этих систем - регулятор .
Если системы выполняют только одну задачу — поддерживают постоянной регулируемую величину, их называют системами автоматической стабилизации. Однако существуют такие процессы, для которых необходимо изменять во времени регулируемую величину по определенному закону, обеспечивая ее стабильность на отдельных участках. В этом случае автоматическую систему называют системой программного регулирования .
Для обеспечения постоянства регулируемой величины можно использовать один из принципов регулирования - по отклонению, возмущению или комбинированный, которые будут рассмотрены применительно к системам регулирования напряжения генераторов постоянного тока.
При регулировании по отклонению (рис. 2 и 3) элемент сравнения UN сравнивает фактическое напряжение U ф с заданным Uз, определяемым задающим элементом EN. После сравнения на выходе элемента UN появляется сигнал Δ U=Uз - U ф, пропорциональный отклонению напряжения от заданного. Этот сигнал усиливается усилителем А и поступает на рабочий орган L. Изменение напряжения на рабочем органе L, которым является обмотка возбуждения генератора G, приводит к изменению фактического напряжения генератора, устраняющего его отклонение от заданного.
Усилитель А, не изменяющий принципа действия системы, необходим для ее практической реализации, когда мощность сигнала, поступающего от элемента сравнения UN, недостаточна для воздействия на рабочий орган L.
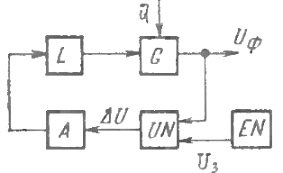
Рис. 2. Система автоматического регулирования
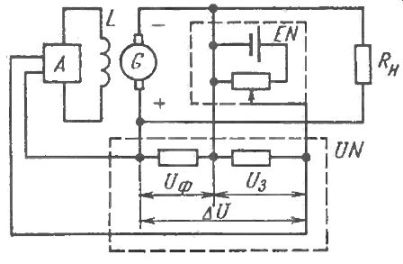
Рис. 3. Автоматическое регулирование по отклонению
Наряду с задающим воздействием на систему могут влиять различные дестабилизирующие факторы Q, которые вызывают отклонение регулируемой величины от заданной. Воздействия дестабилизирующих факторов, один из которых условно обозначен на рисунке буквой Q, могут проявляться в различных местах системы и, как принято говорить, поступать по различным каналам. Так, например, изменение температуры окружающей среды приводит к изменению сопротивления в цепи обмотки возбуждения, что в свою очередь влияет на напряжение генератора.
Однако где бы ни возникали воздействия Q (со стороны потребителя — ток нагрузки, вследствие изменения параметров цепи возбуждения), система регулирования будет реагировать на вызванное ими отклонение регулируемой величины от заданной.
Наряду с рассмотренным принципом регулирования используют регулирование по возмущению , при котором в системе предусматривают специальные элементы, измеряющие воздействия Q и влияющие на рабочий орган.
В системе, использующей только такой принцип регулирования (рис. 4 и 5), фактическое значение регулируемой величины не учитывается. Принимают во внимание только одно возмущающее воздействие — ток нагрузки I н. В соответствии с изменением тока нагрузки происходит изменение магнитодвижущей силы (мдс) обмотки возбуждения L2, являющейся измерительным элементом данной системы. Изменение мдс этой обмотки приводит к соответствующему изменению напряжения на выводах генератора.
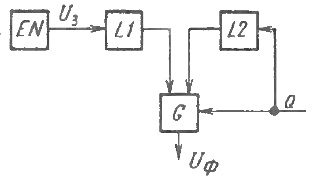
Рис. 4. Автоматическое регулирование по возмущению
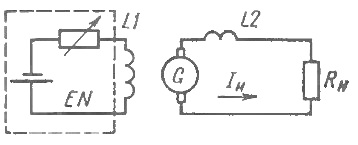
Рис. 5. Принципиальная схема системы автоматики
Система, осуществляющая комбинированное регулирование (по отклонению и возмущению), может быть получена объединением ранее рассмотренных систем в одну (рис. 6)
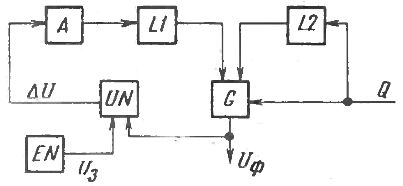
Рис. 6. Система автоматики комбинированного регулирования
В системе автоматического регулирования задающий элемент представлял собой эталон напряжения, с которым сравнивалась регулируемая величина U ф. Значение U p принято называть уставкой регулятора. В общем случае регулируемую величину обозначают буквой Y , а ее уставку Yo .
Если уставку Yo в заданных пределах оператор изменяет вручную, а регулируемой величиной является Y , система работает в режиме стабилизации. Если уставка регулятора изменяется произвольно во времени, система автоматики, поддерживая значение Δ Y = Yo - Y = 0, будет работать в следящем режиме, т. е. следить за изменением Yo .
И наконец, если уставку Yo изменять не произвольно, а по заранее известному закону (программе), система будет работать в режиме программного управления. Такие системы называют системами программного регулирования .
не имеет замкнутой цепи воздействия по регулируемой величине, поэтому ее называют разомкнутой.
Системы автоматики по принципу действия подразделяют на статические и астатические. В статических системах регулируемая величина не имеет строго постоянного значения и с увеличением нагрузки изменяется на некоторую величину, называемую ошибкой регулирования.
Рассмотренные системы (рис. 1 - 6) являются примерами простейших статических систем. Наличие ошибки регулирования в них обусловлено тем, что для обеспечения большего тока возбуждения необходимо большее отклонение напряжения.
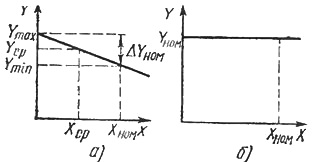
Рис. 7. Внешние характеристики систем автоматики: а - статической, б - астатисческой
Зависимость напряжения генератора от тока нагрузки в виде прямой наклонной линии показана на рис. 7, а. Наибольшее относительное отклонение напряжения от заданного называют статизмом системы по напряжению: Δ = = (Um a x - Umin)/Um a x, где (Um a x, Umin - напряжения генератора на холостом ходу и под нагрузкой. Обобщая сделанное заключение для любой статической системы, можно записать: Δ = ( Y m a x - Y min)/ Y m a x, где Y — регулируемая величина.
Иногда статизм определяют по другой формуле: Δ = ( Y m a x - Y min)/ Y ср, причем Y ср = 0,5( Y m a x + Y min) - среднерегулируемая величина Y . Статизм называют положительным, если с ростом нагрузки значение Y уменьшается, и отрицательным, если значение Y увеличивается.
В астатических системах статизм равен нулю и поэтому зависимость регулируемой величины от нагрузки представляет собой линию, параллельную оси нагрузки (рис. 7,6).
Рассмотрим, например, астатическую систему автоматики (см. рис. 8), в которой напряжение генератора регулируется изменением сопротивления реостата R , включенного в цепь обмотки возбуждения L.
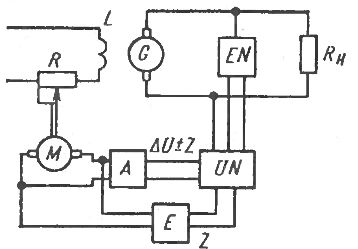
Рис. 8. Астатическая система автоматики
Серводвигатель М начинает вращаться и перемещать ползунок реостата R всякий раз, когда на входе усилителя А появляется сигнал Δ16; U об отклонении напряжения генератора U ср от заданного значения U p . Ползунок реостата перемещается до тех пор, пока сигнал об отклонении не станет равным нулю. Такая система отличается от другой системы тем, что для поддержания нового значения тока возбуждения не требуется сигнала на выходе усилителя А. Это отличие и позволяет избавиться от статизма.
Во всех ранее приведенных примерах предполагалось, что воздействие на рабочий орган производилось непрерывно в течение всего промежутка времени, пока существует отклонение регулируемой величины от заданной. Такое управление называется непрерывным , а системы — системами непрерывного действия .
Однако существуют системы, называемые дискретными, в которых воздействие на рабочий орган осуществляется с перерывами, например система регулирования температуры подошвы утюга, в которой регулирующее воздействие может принимать только одно из двух фиксированных значений при непрерывном изменении регулируемой величины — температуры.
В этой системе регулирование температуры осуществляется включением и отключением нагревательного элемента R по сигналу датчика температуры (смотрите - Базовые элементы автоматики). При увеличении температуры сверх уставки датчик размыкает свой контакт и отключает нагревательный элемент. При снижении температуры ниже уставки нагревательные элементы включаются. Эта система не имеет устойчивого промежуточного состояния рабочего органа, а он занимает лишь два положения — включено в сторону "больше" или включено в сторону "меньше".

Для обеспечения необходимого качества процесса регулирования в системе могут быть предусмотрены специальные устройства, называемые обратными связями . Эти устройства отличаются от других тем, что сигнал в них имеет направление, обратное основному управляющему сигналу.
Для примера на рис. 8 изображена обратная связь Е по отклонению регулируемой величины Δ U , соединяющая выход усилителя А со входом элемента сравнения UN. При положительной обратной связи Е на выходе элемента сравнения UN получается сумма величин Δ U и Z, а при отрицательной — их разность.
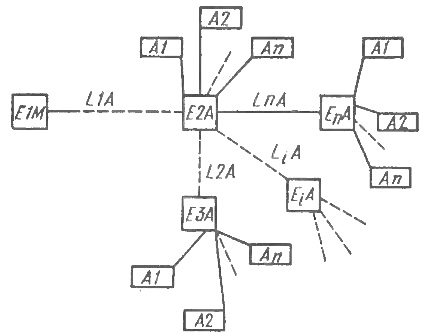
Рис. 9. Структурная схема системы телемеханики
Рассмотренные системы автоматики предполагают непосредственную связь всех входящих в них элементов. Если элементы системы автоматики расположены на значительном удалении друг от друга, для их соединения используют передатчики, каналы связи и приемники. Такие системы называют телемеханическими .
Телемеханическая система состоит из пункта управления, где находится оператор, управляющий работой системы, одного или нескольких контролируемых пунктов, на которых расположены объекты контроля A 1 - An, линий связи L1A - LnA (каналы передачи данных), соединяющих пункт управления Е1М с контролируемыми пунктами Е2А - Еn (рис. 9). В телемеханической системе по линиям связи можно передавать как все, так и некоторые виды контрольной и управляющей информации.
При передаче информации только о параметрах ОК телемеханическую систему называют с истемой телеизмерения , в которой сигналы с выходов датчиков (измерительных преобразователей, установленных на ОК) передаются на пункт управления Е1М и воспроизводятся в виде показаний стрелочных или цифровых измерительных приборов. Информация может передаваться как непрерывно, так и периодически, в том числе и по команде оператора.
Если на пункт управления передается только информация о состоянии, в котором находится тот или иной объект контроля ("включен", "выключен", "исправен", "неисправен"), такую систему называют системой телесигнализации .
Телесигнализация, как и телеизмерение, выдает оператору исходные данные для принятия решения по управлению ОК или служит для выработки управляющих воздействий в системах телеуправления и телерегулировки. Основное отличие этих систем от предыдущих заключается в том, что в первой из них используются дискретные сигналы типа "включить", "выключить", а во второй — непрерывные, подобно обычным системам регулирования.
Читайте также: