
Линейные асинхронные двигатели реферат
Обновлено: 16.05.2024
Вы можете заказать написание любой учебной работы на любую тему.
* Данная работа не является научным трудом, не является выпускной квалификационной работой и представляет собой результат обработки, структурирования и форматирования собранной информации, предназначенной для использования в качестве источника материала при самостоятельной подготовки учебных работ.
Содержание Введение……………………………………………………………………………………….. 4 1. Выполнение и содержание расчетов…………………………………………………….. 6 1.1. Выбор главных размеров…………………………………………………………….. 6 1.2. Определение параметров статора…………………………………………………… 7 1.3. Расчет размеров зубцовой зоны статора и воздушного зазора……………………. 9 1.4. Расчет ротора…………………………………………………………………………. 10 1.5. Расчет магнитной цепи………………………………………………………………. 12 1.6. Параметры рабочего режима………………………………………………………… 14 1.7. Расчет потерь…………………………………………………………………………. 17 1.8. Расчет рабочих характеристик………………………………………………………. 19 1.9. Расчет пусковых характеристик…………………………………………………….. 22 1.9.1. С учетом влияния эффекта вытеснения тока………………………………… 22 1.9.2. С учетом влияния эффекта вытеснения тока и насыщения от полей рассеяния……………………………………………………………………….. 24 1.10. Тепловой расчет…………………………………………………………………….. 29 1.11. Вывод………………………………………………………………………………… 31 2. Специальная часть………………………………………………………………………… 32 2.1. Проводниковые материалы, применяемые в асинхронных двигателях………….. 32 2.2. Обмоточные провода, применяемые в асинхронных двигателях…………………. 34 3. Список используемой литературы………………………………………………………. 36 Введение. Электротехническая промышленность – ведущая отрасль народного хозяйства. Продукция электротехнической промышленности используется почти во всех промышленных установках, поэтому качество электротехнических изделий во многом определяет технический уровень продукции других отраслей. Проектирование электрических машин – это искусство, соединяющее знание процессов электромеханического преобразования энергии с опытом, накопленным поколениями инженеров-электромехаников, умением применять вычислительную технику и талантом инженера, создающего новую или улучшающего уже выпускаемую машину. При создании электрической машины рассчитываются размеры статора и ротора, выбираются типы обмоток, обмоточные провода, изоляция, материалы активных и конструктивных частей машины. При проектирование необходимо учитывать соответствие технико-экономических показателей машин современному мировому уровню при соблюдении требований государственных и отраслевых стандартов. Приходится также учитывать назначение и условия эксплуатации, стоимость активных и конструктивных материалов, КПД, технологию производства, надежность в работе и патентную чистоту. Расчет и конструирование электрических машин неотделимы от технологии их изготовления. Поэтому при проектировании необходимо учитывать возможности электротехнических заводов, стремиться к максимальному снижению трудоемкости изготовления электрических машин. Проектирование электрической машины сводится к многократному расчету зависимостей между основными показателями, заданных в виде системы формул, эмпирических коэффициентов, графических зависимостей, которые можно рассматривать как уравнения проектирования. Данный курсовой проект содержит проектирование трехфазного асинхронного двигателя с короткозамкнутым ротором. Понятие асинхронной машины связано с тем, что ротор ее имеет частоту вращения, отличающуюся от частоты вращения магнитного поля статора. Асинхронные двигатели являются основными преобразователями электрической энергии в механическую и составляют основу электропривода большинства механизмов, используемых во всех отраслях народного хозяйства. В основу конструкции асинхронного двигателя положено создание системы трехфазного переменного тока. Переменный ток, подаваемый в трехфазную обмотку статора двигателя, формирует в нем вращающееся магнитное поле. Базовой моделью для проектирования является двигатель серии 4А. В серии 4А за счет применения новых электротехнических материалов и рациональной конструкции мощность двигателей при данных высотах оси вращения повышена на две-три ступени по сравнению с мощностью двигателей серии А2, что дало большую экономию дефицитных материалов. Существенно улучшились виброшумовые характеристики. При проектировании серии большое внимание было уделено повышению надежности машин. Впервые в мировой практике для асинхронных двигателей общего назначения были стандартизированы показатели надежности. Особое внимание при проектировании уделялось экономичности двигателей. Двигатели серии 4А спроектированы оптимальными для нужд народного хозяйства. Критерием оптимизации была принята суммарная стоимость двигателя в производстве и эксплуатации, которая должна быть минимальной. Серия охватывает диапазон мощностей от 0,6 до 400 кВт и построена на 17 стандартных высотах оси вращения от 50 до 355 мм. Серия включает основное исполнение двигателей, ряд модификаций и специализированное исполнение. Двигатели основного исполнения предназначены для нормальных условий работы и являются двигателями общего назначения. Это трехфазные асинхронные двигатели с короткозамкнутым ротором, рассчитанные на частоту сети 50 Гц. Они имеют исполнение степени защиты IP 44 во всем диапазоне высот оси вращения и IP 23 в диапазоне высот осей вращения 160 – 355 мм. К электрическим модификациям двигателей серии 4А относятся двигатели с повышенным номинальным скольжением, с повышенным пусковым моментом, многоскоростные, с частотой питания 60 Гц и т.п., к конструктивным модификациям – двигатели с фазным ротором, со встроенным электромагнитным тормозом, малошумные, со встроенной температурной защитой и т.п. Для производства двигателей серии 4А разработана и осуществлена прогрессивная технология. Механическая обработка станин, валов и роторов двигателей производится на автоматических линиях, штамповка листов магнитопровода – на прессах-автоматах. Автоматизирована сборка сердечников статора, механизирована сборка и заливка роторов. Укладка статорной обмотки производится на автоматических станках, а пропитка и сушка обмоток на автоматических струйных или вакуум-нагнетательных установках. Испытание узлов двигателей и двигателей в сборе производится на специальных стендах и автоматических испытательных станциях. Все это обеспечило высокую производительность труда при высоком качестве изготовления. По своим энергетическим, пусковым, механическим, виброшумовым, эксплуатационным характеристикам серия 4А удовлетворяет всем требованиям, предъявляемым к асинхронным двигателям, и соответствует современному уровню электромашиностроения. Выбор главных размеров. 1. Высота оси вращения (предварительно) по рис. 8.17, а h = 260 мм. Принимаем ближайшее стандартное значение h = 250 мм; D а = 0.45 м (см. табл. 8.6). 2. Внутренний диаметр статора D = k D · Da = 0.68 · 0.45 = 0.306 м, k D = 0,68 по табл. 8.7. 3. Полюсное деление ф = рD /(2 p ) = р 0.306/4 = 0.24 м. 4. Расчетная мощность по (8.4) ( k Е – по рис. 8.20; з и cosц – см. задание на проектирование). 5. Электромагнитные нагрузки (предварительно по рис. 8.22,б) А = 38·10 і А/м; В д = 0.78 Тл. 6. Обмоточный коэффициент (предварительно для двухслойной обмотки) k об1 = 0.92. 7. Расчетная длина магнитопровода по (8.6) [по (8.5) Щ = 2р f / p = 2 р 50/2 = 157 рад/с; k в = 1,11 – коэффициент формы поля]. 8. Отношение л = lд / ф = 0.23/0.24 = 0.96. Значение л = 0,96 находится в допустимых пределах (см. рис. 8.25, а). Определение Z 1, w 1 и площади поперечного сечения провода обмотки статора. 9. Предельные значения tz 1 (по рис. 8.26): tz 1 max = 0.018 м; tz 1 min = 0.015 м. 10. Число пазов статора по (8.16) Принимаем Z 1 = 60, тогда q 1 = Z 1/(2 pm ); 60/(4*3) = 5. Обмотка двухслойная. 11. Зубцовое деление статора (окончательно) 12. Число эффективных проводников в пазу (предварительно, при условии а = 1 по (8.17)) 13. Принимаем а = 2, тогда по (8.19) U п = а U п = 13 проводников. 14. Окончательные значения: число витков в фазе по (8.20) линейная нагрузка по (8.21) магнитный поток по (8.22) (для обмотки с q =5 по табл. 3.16 k об1= k р1=0,957; для D а=0,45 м по рис. 8.20 k Е = 0,98); индукция в воздушном зазоре по (8.23) Значения А и В д находятся в допустимых пределах (см. рис. 8.22, б). 15. Плотность тока в обмотке статора (предварительно) по (8.25) ( AJ =188*10і по рис. 8.27, б). 16. Площадь поперечного сечения эффективного проводника (предварительно) по (8.24) 17. Сечение эффективного проводника (окончательно): принимаем n эл=7, тогда q эл= q эф/ n эл=9,4/7=1,344 мм І. Принимаем обмоточный провод марки ПЭТМ (см. приложение 3), d эл=1,4 мм, q эл=1,539 мм І, q э.ср= n эл q эл=10,7 мм І. 18. Плотность тока в обмотке статора (окончательно) по (8.27) Расчет размеров зубцовой зоны статора и воздушного зазора. Паз статора определяем по рис. 8.29,а с соотношением размеров, обеспечивающих параллельность боковых граней зубцов. 19. Принимаем предварительно по табл. 8.10 Bz1=1.9 Тл; Ва=1.6 Тл, тогда по (8.37) (по табл. 8.11 для оксидированной стали марки 2013 k с=0,97); по (8.28) 20. Размеры паза в штампе: b ш=3,7 мм; h ш=1 мм; в=45 ˚ (см. рис. 8.29,а); по (8.38) по (8.40) по (8.39) по (8.42) – (8.45) 21. Размеры паза в свету с учетом припуска на сборку: Площадь поперечного сечения паза для размещения проводников обмотки по (8.48) [площадь поперечного сечения прокладок S пр=(0,9 b 1+0,4 b 2)*10ˉ і=14 мм І; площадь поперечного сечения корпусной изоляции в пазу S из= b из(2 h п+ b 1+ b 2)=0,4(2*34,2+9,7+12,9)=36,4мм І, где односторонняя толщина изоляции в пазу b из=0,4мм – по табл. 3.1]. 22. Коэффициент заполнения паза Полученное значение k з допустимо для механизированной укладки обмотки. Расчет ротора. 23. Воздушный зазор (по рис.8.31) д=0,8 мм. 24. Число пазов ротора (по табл. 8.16) Z2=52. 25. Внешний диаметр ротора D 2= D - 2 д = 0,306 – 2*0,8*10 ˉ і=0,304 м. 26. Длина магнитопровода l 2= l 1=0.23 м. 27. Зубцовое деление ротора tZ 2= рD 2/ Z 2= р 0.304/52=0.0184м=18,4мм. 28. Внутренний диаметр ротора равен диаметру вала, так как сердечник ротора непосредственно насаживается на вал; по (8.102) Dj=D B =k B Da=0.23·0.45=103.5 мм ( k B по табл.8,17). 29. Ток в обмотке ротора по (8.57) где по (8.58) ki = 0.2+0.8 cosц =0.928 [по (8.66) (пазы ротора выполняем без скоса – k ск=1)] 30. Площадь поперечного сечения стержня (предварительно) по (8.68) qc = I2/J2 = 621.7/(2.5· 10і) = 248.7·10 ˉ і м І = 248,7 мм І (плотность тока в стержне литой клетки принимаем J 2 = 2.5·10і А/м І). 31. Паз ротора определяем по рис. 8.40, б. Принимаем b ш=1,5 мм; h ш=0,7 мм; h ’ ш=0,3мм. Допустимая ширина зубца по (8.75) (принимаем B Z 2 = 1.8 Тл по табл. 8.10). Размеры паза (см. рис. 8.40) по (8.76) 32. Уточняем ширину зубцов ротора по формулам табл. 8,18: Принимаем b 1=9,6 мм; b 2=6,7 мм; h 1=24 мм. Полная высота паза 33. Площадь поперечного сечения стержня по (8.79) Плотность тока в стержне J2 = I2/qc = 621.7/249 = 2.5·10іA/ м І. 34. Короткозамыкающие кольца (см. рис. 8,37, б). Площадь поперечного сечения кольца по (8.72) q кл = I кл/ J кл = 2580/2,13·10і = 1211,3 мм І [по (8.70) и (8.71) I кл = I 2/ Д = 621.7/0.241 = 2580 A , где Д = 2 sin [( р ·p )/ Z 2] = 2 sin [( р 2)/52] = 0.241; J кл = 0,85 J 2 = 0.85 · 2.5 · 10і = 2.13·10і А/м І]. Размеры размыкающих колец: h кл = 1.25 h п2 = 1,25·33,2 = 41,5 мм; b кл = q кл/ h кл = 1211,3/41,5 = 29,2 мм; q кл = h кл· b кл = 41,5·29,2 = 1211,8 мм І; D к.ср = D 2 – h кл = 304 – 41,5 = 262,5 мм. Расчет магнитной цепи. Магнитопровод из стали 2013; толщина листов 0,5 мм. 35. Магнитное напряжение воздушного зазора по (8.103) 36. Магнитное напряжение зубцовой зоны статора по (8.104) Fz1 = 2hz1Hz1 = 2·34.2·10ˉ і·2070=141.6 A, где hz 1 = h п1 = 34.2 мм (см. п. 20 расчета); расчетная индукция в зубцах по (8.105) ( bz 1 = 6.7 мм по п. 19 расчета; k с1 = 0,97 по табл. 8.11). Так как B ’ z 1 > 1,8 Тл, необходимо учесть ответвление потока в паз и найти действительную индукцию в зубце Bz 1. Коэффициент k пх по высоте hzx = 0.5 hz по (4.33) по (4.32) Принимаем Bz 1 = 1,9 Тл, проверяем соотношением Bz 1 и B ’ z 1: 1.9 = 1.9 – 1.256·10ˉ і·2070·1.74 = 1.9, где для Bz 1 = 1.9 Тл по табл. П1.7 Hz1 = 2070 A/ м. 37. Магнитное напряжение зубцовой зоны ротора по (8.108) Fz 2 = 2 hz 2 Hz 2 = 2·0.0325·1520 = 98.8 A [при зубцах по рис. 8.40, б из табл. 8.18 hz2 = h п2 – 0.1b2 = 32.5 мм; индукция в зубце по (8.109) по табл. П1.7 для Bz2 = 1.8 Тл находим Hz2 = 1520 А/м ]. 38. Коэффициент насыщения зубцовой зоны по (8.115) 39. Магнитное напряжение ярма статора по (8.116) Fa = LaHa = 0.324·750 = 243 A [ по (8.119) (при отсутствии радиальных вентиляционных каналов в статоре h ’ a = ha = 0.0378 м) для Ва=1,6 Тл по табл. П1.6 находим Ha=750 А/м ]. 40. Магнитное напряжение ярма ротора по (8.121) Fj = LjHj = 0.134·164 = 22 A [ по (8.127) где по (8.124) для четырехполюсных машин при 0,75(0,5 D 2 – h п2)
1. Введение.
2. Линейный асинхронный двигатель.
2.1 Конструкция и принцип действия.
2.2 Разновидности.
2.2.1 Конструктивные параметры.
2.2.2 Дуговой двигатель.
2.2.3 Трубчатый двигатель.
2.3 Применение.
3. Линейный двигатель постоянного тока.
3.1 Конструкция и принцип действия.
3.2 Применение.
4. Линейный синхронный двигатель.
4.1 Применение.
5. Вывод.
Интересные и широкие перспективы развития электропривода связаны с применением так называемых линейных двигателей.
Большое число производственных механизмов и устройств имеют поступательное или возвратно-поступательное движение рабочих органов (подъёмно-транспортные машины, механизмы подач различных станков, прессы, молоты и т.д.). В качестве привода этих механизмов и устройств использовались обычные электродвигатели в сочетании со специальными видами механических передач (кривошипно-шатунный механизм, передача винт-гайка), преобразовавших вращательное движение рабочего органа.
Линейные двигатели могут быть асинхронными, синхронными и постоянного тока, повторяя по принципу своего действия соответствующие двигатели вращательного движения.
2. Линейный асинхронный двигатель.
2.1 Конструкция и принцип действия.
2.2 Разновидности.
2.2.1 Конструктивные параметры.
Представленная на рис. 2 конструкция представляет собой линейный двигатель с одинаковыми размерами статора и вторичного элемента. Помимо такой конструкции, в зависимости от назначения линейного двигателя вторичный элемент может быть длиннее статора (рис. 2а) или короче его (рис. 2б). Такие двигатели получили соответственно название двигателей с коротким статором и коротким вторичным элементом. Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Часто – и в этом одно из достоинств линейного асинхронного двигателя – в качестве вторичного элемента используется металлический лист (полоса), как показано на рис. 2д. Вторичный элемент при этом может располагаться также между двумя статорами (рис. 2в) или между статором и ферромагнитным сердечником (рис. 2г). Двигатель с конструктивной схемой, приведённой на рис. 2д, получил название двигателя с односторонним статором, со схемой по рис. 2в – с двусторонним статором и со схемой по рис. 2г – с односторонним статором и сердечником. Вторичный элемент выполняется из меди, алюминия или стали, причём использование не магнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы, как, например, на рис. 2в, г. Некоторое распространение получили сложные составные вторичные элементы с прилегающими друг к другу полосами из немагнитного и ферромагнитного материала, при этом ферромагнитная полоса выполняет роль части магнитопровода. Принцип действия линейных двигателей с вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трёхфазного переменного тока. Отметим, что линейные двигатели очень часто работают в так называемом обращённом режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте.
2.2.2 Дуговой двигатель.
Дуговой двигатель характеризуется расположением обмотки на части окружности, как это показано на рис. 3.Особенностью этого двигателя является зависимость частоты вращения его статора 1 от длины дуги, на которой располагаются обмотки 2 статора 3.
Пусть обмотки статора располагаются на дуге, длина которой соответствует центральному углу α = 2τр, где τ - длина полюсного деления и p – число пар полюсов. Тогда за один период тока вращающееся поле статора совершит поворот на угол 2τр/р = α/р, а в течение одной минуты поле повернётся на n = α/p*60f/2π оборотов, т. е. будет иметь частоту вращения n, об/мин.
Выбирая различные α, можно выполнять дуговые двигатели с различными частотами вращения ротора.
2.2.3 Трубчатый двигатель.
Конструкция трубчатого линейного двигателя представлена на рис. 4.
Статор двигателя 1 имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки 2 (обмотки статора) и металлические шайбы 3, являющиеся частью магнитопровода. катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент 4 также трубчатой формы, выполненный из ферромагнитного материала.
При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуктирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создаёт на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении. Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока в отличие от плоского линейного двигателя, в котором магнитный поток имеет радиальное направление.
2.3 Применение.
Широкое применение линейные двигатели нашли в электрическом транспорте, чему способствовал целый ряд преимуществ этих двигателей. Одно из них, уже отмеченное выше, определяется прямолинейностью движения вторичного элемента (или статора), что естественно сочетается с характером движения транспортных средств.
Другое, не менее важное обстоятельство связанно с независимостью силы тяги от силы сцепления колёс с рельсовым путём, что недостижимо длят обычных систем электрической тяги. Поэтому ускорения и скорости движения средств транспорта при использовании линейных двигателей могут быть сколь угодно высокими и ограничиваться только комфортабельностью движения, допустимой скоростью качения колёс по рельсовому пути и дороге, динамической устойчивостью ходовой части транспорта и пути. Исключается при использовании линейных двигателей и буксование колёс электрического транспорта.
Одна из возможных конструктивных схем сочленения линейного двигателя с рельсовым транспортным средством показана на рис. 5.
Линейный двигатель, укреплённый на тележке 3 подвижного состава, имеет конструкцию с двусторонним статором 1. Вторичным элементом является укреплённая между рельсами полоса 2. Напряжение на статор двигателя подаётся с помощью скользящих контактов. Известны также конструкции линейных двигателей, где вторичным элементом являются рельс и элементы несущей конструкции. Такие схемы характерны, в частности, для монорельсовых пассажирских и грузовых дорог и механизмов передвижения кранов. На рис. 6 в качестве примера показаны отечественный линейный двигатель, сконструированный для монорельсовой дороги. Этот двигатель имеет двусторонний статор 1 с обмоткой 2, внутри которого находится вторичный элемент в виде полосы 3. Статор двигателя перемещается по полосе с помощью несущих роликов 5. Ролики 4 служат для взаимной фиксации статора и вторичного элемента в горизонтальном направлении.
На рис. 7 показан пример использования линейных асинхронных двигателей для механизмов транспортировки грузов различных изделий.
Конвейер, предназначенный для перемещения сыпучего материала 1 из бункера 2, имеет металлическую ленту 3, укреплённую на барабанах 4. Металлическая лента проходит внутри статоров 5 линейного двигателя, являясь вторичным элементом. Применение линейного двигателя в этом случае позволяет снизить предварительное натяжение ленты и устранить её проскальзывание, повысить скорость и надёжность работы конвейера.
Большой интерес представляет использование линейного двигателя для машин ударного действия, например сваезабивных молотов, применяемых при дорожных работах и строительстве. Конструктивная схема такого молота, показана на рис. 8.Статор линейного двигателя 1 располагается на стреле молота 2 и может перемещаться по направляющим стрелы в вертикальном направлении с помощью лебёдки 3. Ударная часть молота 4 является одновременно вторичным элементом двигателя.
Для подъёма ударной части молота двигатель включается таким образом, чтобы бегущее поле было направленно вверх. При подходе ударной части к крайнему верхнему положению двигатель отключается и ударная часть опускается вниз на сваю под действием силы тяжести. В некоторых случаях двигатель не отключается, а реверсируется, что позволяет увеличить энергию удара. По мере заглубления сваи статор двигателя перемещается вниз с помощью лебёдки.
Электрический молот, прост в изготовлении, не требует повышенной точности изготовления двигателей, не чувствителен к изменению температуры и может вступать в работу практически мгновенно.
3. Линейный двигатель постоянного тока.
Наряду с асинхронными линейными двигателями применяются линейные двигатели постоянного тока. Они чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных пусковых усилий.
3.1 Конструкция и принцип действия.
Линейные электродвигатели постоянного тока состоит из якоря с расположенной на нём обмоткой, служащей одновременно коллектором (направляющий элемент), и разомкнутого магнитопровода с обмотками возбуждения (подвижная часть), расположенными так, что векторы сил, возникающих под полюсами магнитопровода, имеют одинаковое направление. Кроме того, линейные двигатели постоянного тока (как и двигатели вращательного движения) позволяют при необходимости просто регулировать скорость движения рабочих органов.
3.2 Применение.
На рис. 9 показана схема линейного двигателя постоянного тока, который применяется для перемещения промышленных изделий. Этот двигатель по существу представляет собой двигатель постоянного тока с полым цилиндрическим якорем, разрезанный по образующей и развёрнутый в плоскость.
Подвижная часть двигателя – якорь - состоит из немагнитного остова 1 и укреплённой на нём обмотки 2 якоря, которая может быть выполнена из изолированного обмоточного провода или изготовлена из медной фольги путём её травления. Ширина витков обмотки в направлении движения, как и в обычных двигателях постоянного тока, близка к полюсному делению (т. е. расстоянию по окружности между полюсами магнитной системы двигателя). Токопровод к обмотке осуществляется с помощью коллектора 3 и щёток 4. На станине двигателя 5 крепится комплект полюсов 6 с обмотками возбуждения 7, размещённых в ряд по направлению движения якоря. Другими частями магнитопровода двигателя являются стальные сердечники 8 и сама станина, выполненная также из ферромагнитного материала. Якорь двигателя вместе со столиком 9 для крепления перемещаемого изделия 10 движется по неподвижным опорам 11 так, что его плоскости с обмотками всё время находятся в зазоре между сердечниками 8 и полюсами 6. На принципе работы линейного двигателя основано действие специальных насосов для перекачки электропроводящих жидкостей и в том числе жидких металлов. Такие насосы, часто называемые магнитогидродинамическими, широко применяются в металлургии для транспортировки, дозировки и перемешивания жидкого металла, а также на атомных электростанциях для перекачки жидкометаллического теплоносителя.
Магнитогидродинамические насосы (МГД - насосы) могут быть постоянного или переменного тока. Рассмотрим схему насоса постоянного тока.
Первичным элементом – статором двигателя является С – образный электромагнит 1. В воздушный зазор электромагнита помещается трубопровод 2 с жидким металлом. С помощью электродов 3, приваренных к стенкам трубопровода, через жидкий металл пропускается постоянный ток от внешнего устройства. Часто обмотка возбуждения включается последовательно в цепь электродов 3. При возбуждении электромагнита на металл в зоне прохождения постоянного тока начинает действовать электромагнитная сила. Под действием этой силы металл начнёт перемещаться по трубопроводу, причём направление его движения просто определить по известному правилу левой руки. Преимуществами МГД – насосов являются отсутствие движущихся механических частей, и возможность герметизации канала транспортировки металла.
4. Линейный синхронный двигатель.
В последние годы всё шире используются синхронные линейные двигатели. Основной областью применения этих двигателей, где их преимущества проявляются особенно сильно, является высокоскоростной электрический транспорт. Дело в том, что по условиям нормальной эксплуатации такого транспорта необходимо иметь сравнительно большой воздушный зазор между подвижной частью и вторичным элементом. Асинхронный линейный двигатель имеет при этом очень низкий коэффициент мощности, и его применение оказывается экономически не выгодным. Синхронный линейный двигатель, напротив, допускает наличие относительно большого воздушного зазора между статором и вторичным элементом и работает при этом с коэффициентом мощности, близким к единице.
Следует отметить, что применение синхронных линейных двигателей в высокоскоростном транспорте сочетается, как правило, с так называемой магнитной подвеской вагонов и применением сверхпроводящих магнитов и обмоток возбуждения, что позволяет повысить комфортабельность движения и экономические показатели работы подвижного состава.
4.1 Применение.
На рис. 11 показана схема путепровода и вагона электропоезда со скоростью движения 400 – 500 км/ч, предназначенного для перевозки 100 пассажиров.
Тяговый синхронный линейный двигатель имеет электромагнитное возбуждение с использованием сверхпроводящих магнитов. Обмотка возбуждения 1 состоит из ряда катушек, равномерно укреплённых под днищем вагона 5. В криогенной системе охлаждения обмоток используется жидкий гелий. Плоская трёхфазная обмотка переменного инвертора, преобразующего напряжения постоянного тока в трёхфазное напряжение переменного тока.
С помощью инвертора осуществляется пуск, изменение скорости движения и торможение поезда.
Путепровод 6 представляет собой бетонное полотно, плоский характер поверхности которого выбран с целью снижения накопления льда и снега. Вагон подвешивается над полотном дороги на высоте 15 см с помощью специальной системы магнитной подвески. Эта система состоит из удлинённых сверхпроводящих электромагнитов 3, расположенных по краям днища вагона, из плоских алюминиевых полос 4, укреплённых в полотне дороги. Принцип работы системы магнитной подвески основывается на действии электродинамических сил, возникающих при взаимодействии потоков сверхпроводящих электромагнитов 3 на борту вагона и вихревых токов, наведённых в алюминиевых полосках 4. Расчёты показали, что при использовании магнитной подвески масса вагона оказывается на 20 т меньше, чем при системе подвески на воздушной подушке.
Для обеспечения поперечной устойчивости поезда при его движении применяется специальная система стабилизации. Она предусматривает укладку дополнительной обмотки вдоль оси дорожного полотна и основана на взаимодействии токов в этой обмотке с полем тяговых электромагнитов. Разработанная система электрической тяги с применением описанного выше синхронного линейного двигателя отличается хорошими эксплуатационными показателями, однако для её работы необходима укладка обмоток в полотно дороги, что удорожает изготовление системы и усложняет её обслуживание, особенно при значительной протяжённости дороги. В связи с этим были разработаны конструкции линейных синхронных двигателей, которые не требуют укладки обмоток в железнодорожное полотно. К их числу относятся линейные синхронные двигатели с так называемым униполярным возбуждением и когтеобразными полюсами. Двигатели того и другого исполнения были использованы для привода 50 – тонного состава со скоростью движения 480 км/ч.
На рис. 12 показана схема синхронного линейного двигателя с униполярным возбуждением. Двигатель имеет два статора 1, установленных на подвижной части состава. Бегущее магнитное поле создаётся с помощью обмоток 2, подключаемых к сети переменного тока. Статоры соединяются магнитопроводом 3, на котором расположена обмотка униполярного возбуждения 4. Эта обмотка создаёт постоянный по направлению магнитный поток, который пронизывает ферромагнитный вторичный элемент 5, укладываемый в магнитопровод. Взаимодействие бегущего магнитного поля с намагниченным вторичным элементом создаёт силу тяги подвижного состава.
Сопоставление линейных синхронных двигателей с униполярным возбуждением и когтеобразными полюсами с асинхронным линейным двигателем на то же тяговое усилие показало, что последний имеет худший коэффициент мощности (около 0,6), более низкий КПД (около 80%) и большую массу на единицу мощности двигателя.
Применение линейных электродвигателей позволяет упростить или полностью исключить механическую передачу, повысить экономичность и надёжность работы привода и производственного механизма в целом.
6. Список литературы.
1. В.В. Маскаленко, Электрические двигатели специального назначения, Энергоиздат 1981.
2. Кавалёв Ю.М., Электрические машины, – М.: Энергия, 1989.
- Для учеников 1-11 классов и дошкольников
- Бесплатные сертификаты учителям и участникам
Министерство образовании Рязанской области
Областное государственое бюджетное
профессиональное образовательное учреждением
Асинхронные электродвигатели (АД) находят в народном хозяйстве широкое применение. По разным данным до 70% всей электрической энергии, преобразуемой в механическую энергию вращательного или поступательного движения, потребляется асинхронным двигателем. Электрическую энергию в механическую энергию поступательного движения преобразуют линейные асинхронные электродвигатели, которые широко используются в электрической тяге, для выполнения технологических операций. Широкое применение АД связано с рядом их достоинств.
Асинхронные двигатели - это самые простые в конструктивном отношении и в изготовлении, надежные и самые дешевые из всех типов электрических двигателей. Они не имеют щеточноколлекторного узла либо узла скользящего токосъема, что помимо высокой надежности обеспечивает минимальные эксплуатационные расходы. В зависимости от числа питающих фаз различают трехфазные и однофазные асинхронные двигатели.
Трехфазный асинхронный двигатель при определенных условиях может успешно выполнять свои функции и при питании от однофазной сети. АД широко применяются не только в промышленности, строительстве, сельском хозяйстве, но и в частном секторе, в быту, в домашних мастерских, на садовых участках.
Однофазные асинхронные двигатели приводят во вращение стиральные машины, вентиляторы, небольшие деревообрабатывающие станки, электрические инструменты, насосы для подачи воды. Чаще всего для ремонта или создания механизмов и устройств промышленного изготовления или собственной конструкции применяют трехфазные АД. Причем в распоряжении конструктора может быть как трехфазная, так и однофазная сеть. Возникают проблемы расчета мощности и выбора двигателя для того или другого случая, выбора наиболее рациональной схемы управления асинхронным двигателем, расчета конденсаторов, обеспечивающих работу трехфазного асинхронного двигателя в однофазном режиме, выбора сечения и типа проводов, аппаратов управления и защиты. Такого рода практическим проблемам посвящена предлагаемая вниманию читателя книга. В книге приводится также описание устройства и принципа действия асинхронного двигателя, основные расчетные соотношения для двигателей в трехфазном и однофазном режимах.
Устройство и принцип действия асинхронных электродвигателей
Устройство трехфазных асинхронных двигателей
Трехфазный асинхронный двигатель (АД) традиционного исполнения, обеспечивающий вращательное движение, представляет собой электрическую машину, состоящую из двух основных частей: неподвижного статора и ротора, вращающегося на валу двигателя. Статор двигателя состоит из станины, в которую впрессовывают так называемое электромагнитное ядро статора, включающее магнитопровод и трехфазную распределенную обмотку статора. Назначение ядра - намагничивание машины или создание вращающегося магнитного поля. Магнитопровод статора состоит из тонких (от 0,28 до 1 Мм) изолированных друг от друга листов, штампованных из специальной электротехнической стали. В листах различают зубцовую зону и ярмо (рис. 1.а). Листы собирают и скрепляют таким образом, что в магнитопроводе формируются зубцы и пазы статора (рис. 1.б). Магнитопровод представляет собой малое магнитное сопротивление для магнитного потока, создаваемого обмоткой статора, и благодаря явлению намагничивания этот поток усиливает.

Рис. 1 Магнитопровод статора
В пазы магнитопровода укладывается распределенная трехфазная обмотка статора. Обмотка в простейшем случае состоит из трех фазных катушек, оси которых сдвинуты в пространстве по отношению друг к другу на 120°. Фазные катушки соединяют между собой по схемам звезда, либо треугольник (рис. 2).

Рис 2. Схемы соединения фазных обмоток трехфазного асинхронного двигателя в звезду и в треугольник

Рис. 3. Ротор аснхронного двигателя с короткозамкнутой обмоткой
Общий вид асинхронного двигателя серии 4А представлен на рис. 4 [2]. Ротор 5 напрессовывается на вал 2 и устанавливается на подшипниках 1 и 11 в расточке статора в подшипниковых щитах 3 и 9, которые прикрепляются к торцам статора 6 с двух сторон. К свободному концу вала 2 присоединяют нагрузку. На другом конце вала укрепляют вентилятор 10 (двигатель закрытого обдуваемого исполнения), который закрывается колпаком 12. Вентилятор обеспечивает более интенсивное отведение тепла от двигателя для достижения соответствующей нагрузочной способности. Для лучшей теплоотдачи станину отливают с ребрами 13 практически по всей поверхности станины. Статор и ротор разделены воздушным зазором, который для машин небольшой мощности находится в пределах от 0,2 до 0,5 мм. Для прикрепления двигателя к фундаменту, раме или непосредственно к приводимому в движение механизму на станине предусмотрены лапы 14 с отверстиями для крепления. Выпускаются также двигатели фланцевого исполнения. У таких машин на одном из подшипниковых щитов (обычно со стороны вала) выполняют фланец, обеспечивающий присоединение двигателя к рабочему механизму.

Рис. 4. Общий вид асинхронного двигателя серии 4А
Выпускаются также двигатели, имеющие и лапы, и фланец. Установочные размеры двигателей (расстояние между отверстиями на лапах или фланцах), а также их высоты оси вращения нормируются. Высота оси вращения - это расстояние от плоскости, на которой расположен двигатель, до оси вращения вала ротора. Высоты осей вращения двигателей небольшой мощности: 50, 56, 63, 71, 80, 90, 100 мм.
Принцип действия трехфазных асинхронных двигателей
Выше отмечалось, что трехфазная обмотка статора служит для намагничивания машины или создания так называемого вращающегося магнитного поля двигателя. В основе принципа действия асинхронного двигателя лежит закон электромагнитной индукции. Вращающееся магнитное поле статора пересекает проводники короткозамкнутой обмотки ротора, отчего в последних наводится электродвижущая сила, вызывающая в обмотке ротора протекание переменного тока. Ток ротора создает собственное магнитное поле, взаимодействие его с вращающимся магнитным полем статора приводит к вращению ротора вслед за полями. Наиболее наглядно идею работы асинхронного двигателя иллюстрирует простой опыт, который еще в XVIII веке демонстрировал французский академик Араго (рис. 5). Если подковообразный магнит вращать с постоянной скоростью вблизи металлического диска, свободно расположенного на оси, то диск начнет вращаться вслед за магнитом с некоторой скоростью, меньшей скорости вращения магнита.

Рис. 5. Опыт Араго, объясняющий принцип работы асинхронного двигателя.
Это явление объясняется на основе закона электромагнитной индукции. При движении полюсов магнита около поверхности диска в контурах под полюсом наводится электродвижущая сила и появляются токи, которые создают магнитное поле диска. Читатель, которому трудно представить проводящие контуры в сплошном диске, может изобразить диск в виде колеса со множеством проводящих ток спиц, соединенных ободом и втулкой. Две спицы, а также соединяющие их сегменты обода и втулки и представляют собой элементарный контур. Поле диска сцепляется с полем полюсов вращающегося постоянного магнита, и диск увлекается собственным магнитным полем. Очевидно, наибольшая электродвижущая сила будет наводиться в контурах диска тогда, когда диск неподвижен, и напротив, наименьшая, когда близка к скорости вращения диска. Перейдя к реальному асинхронному двигателю отметим, что короткозамкнутую обмотку ротора можно уподобить диску, а обмотку статора с магнитопроводом - вращающемуся магниту. Однако вращение магнитного поля в неподвижном статоре а осуществляется благодаря трехфазной системе токов, которые протекают в трехфазной обмотке с пространственным сдвигом фаз.
Линейные электродвигатели обеспечивают привод оборудования с поступательным или возвратно-поступательным движением рабочих механизмов. Применение подобного типа машин позволяет упростить кинематику процесса, уменьшить потери в передачах и повысить надежность привода в целом.
В условиях производства помимо эл/приводов с вращающимся принципом действия применяют электротехнические устройства, преобразующие электрическую энергию в энергию поступательного движения. Исходя из характера перемещения, они получили название линейные двигатели. Представлены разными конструктивными и техническими решениями зарубежного и российского производства.
Назначение и основные виды
В общем случае линейный электродвигатель, также как и электромотор с вращающимся приводным механизмом обеспечивает механическое перемещение рабочих частей оборудования, но в одной координатной плоскости. Это могут быть двигатели для чпу, конвейеров, транспортеров, промышленных роботов и других производственных агрегатов. Подобные группы механизмов широко используются в сфере электротранспорта. Отличительная особенность приводных устройств состоит в обеспечении линейных перемещений без механических передач. Они относятся к машинам малой мощности, но в то же время достаточной, чтобы выполнять обширный перечень рабочих задач.
В зависимости от конструктивных особенностей структурных элементов и принципа действия различают следующие типы линейных двигателей (ЛД):
- электромагнитные (соленоидные);
- магнитоэлектрические (двигатель на постоянных магнитах);
- электродинамические;
- асинхронные (индукционные);
- синхронные;
- линейные шаговые двигатели;
- пьезоэлектрические и другие.
Отдельные ЛД, например, асинхронные или линейные шаговые двигатели, имеют идентичный принцип действия относительно аналогичных электромоторов с вращательным механизмом. В то же время другие эл/приводы, такие как линейные пьезоэлектрические двигатели, соответствующих аналогов не имеют. В зависимости от типа эл/мотора они могут обладать разными параметрами скорости, нагрузочными характеристиками и подключаться к питающей сети 48, 36, 24 или 12 вольт.
Относительно показателя динамичности, то есть способности быстро развивать нужную скорость, линейные приводы подразделяются на две группы:
Первая категория электромоторов находит применение в качестве тяговых механизмов транспортных средств, в металлообрабатывающем станочном оборудовании, иных технологических установках. Например, линейные асинхронные двигатели являются оптимальным вариантом для приведения в действие ленточных конвейерных агрегатов. Моторы второй группы относятся к малогабаритным решениям и предназначены для кратковременного разгона объектов.
К категории приводных устройств прямолинейного перемещения также относят свободно-поршневые или линейные двигатели внутреннего сгорания. Это обусловлено возвратно-поступательным движением поршня, являющимся основной рабочей частью мотора. При этом рабочий орган двигательной системы находится в замкнутом цилиндрическом объеме и приводится в действие разными способами.
Конструктивное решение
Принципиальная конструкция линейного эл/привода зависит от типа электродвигателя, тем не менее классическая магнитная пара статор-ротор присутствует практически в каждом решении. Исключением могут быть линейные двигатели внутреннего сгорания, в которых ход поршневого механизма осуществляется посредством сжатого воздуха, пружинного устройства и самого веса поршня. Таким образом, устройство ЛД предусматривает две основных функциональных части:
- первичную – статор (индуктор), получающий сетевое питание;
- вторичную – якорь (аналог ротора), питающийся энергией статора.

Один из структурных элементов агрегата перемещается, тогда как второй находится в неподвижном состоянии. В большинстве случаев схема линейного двигателя выполнена из условия перемещающегося якоря и стационарного индуктора. Но существуют и обращенные технические решения с неподвижным вторичным и передвигающимся первичным элементом. Этот вариант исполнения получил широкое распространение в электротранспорте.
В отличие от цилиндрических форм в электродвигателях вращающегося типа статор ЛД представляет собой плоский магнитопровод, содержащий трех- или двухфазную развернутую обмотку. Имеет шихтованную конструкцию, состоящую из пакета плотно уложенных металлических пластин. Вторичный элемент, называемый также бегуном, представляет собой стальной каркас, на котором зафиксированы постоянные магниты или обмотка.
Принцип действия
Линейный электропривод работает практически также, как и вращающийся эл/двигатель. Магнитопровод подключается к сетевому питанию, в результате чего возникает магнитное поле. Отличие состоит в создании индуктором не вращающегося, а бегущего магнитного потока. С другой стороны подвижный якорь с расположенными на нем полюсами имеет свою магнитную область. Принцип работы заключается в возникновении электромагнитных сил при взаимодействии магнитных потоков индуктора и бегуна. Эти силы направлены противоположно друг другу и стремятся линейно переместить подвижную часть относительно неподвижной.
При конфигурировании ЛД особое значение имеет точное соблюдение величины воздушного зазора между статорным и якорным устройством. От этого напрямую зависят нагрузочные характеристики ЛД. То есть чем больший по размеру будет зазор, тем меньшее усилие сможет воспринимать электропривод. Поэтому рабочий стол станков с использованием линейного шагового двигателя или иного привода этой категории выполняют с максимально точным монтажным исполнением. Это позволяет должным образом уложить направляющие элементы приводной системы.
Асинхронные электроприводы
Линейные асинхронные двигатели относятся к наиболее распространенным видам электромоторов с поступательным движением. Работают в соответствии с вышеописанным принципом. Отличаются простой структурой бегуна и в зависимости от его типа подразделяются на следующие группы:
- с короткозамкнутой обмоткой (а);
- со сплошным ферромагнитным омедненным бегуном (б);
- с постоянными магнитами (в).
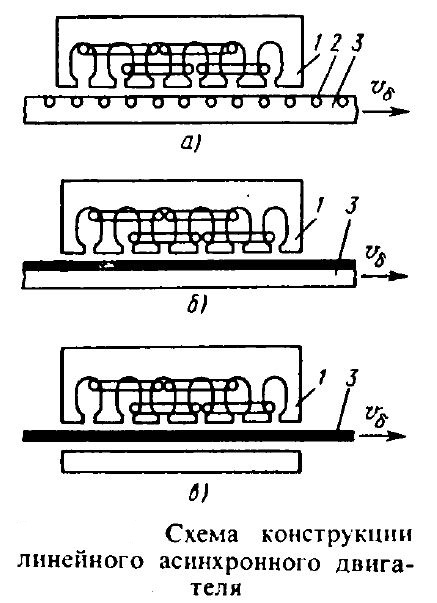
Отличительная особенность линейного асинхронного двигателя с постоянными магнитами состоит в практически полном отсутствии сил притяжения бегуна к статору, что важно для некоторых разновидностей электроприводов. Во многих приводных машинах, в том числе в составе станков с ЧПУ, линейный асинхронный двигатель осуществляет возвратно-поступательное движение. Поэтому он должен иметь хорошие пусковые характеристики, что достигается выбором бегуна с повышенным активным сопротивлением.
Существенный недостаток, которым обладают линейные асинхронные двигатели, состоит в наличии краевого эффекта. Данное явление представляет собой комплекс электромагнитных процессов ухудшающих рабочие характеристики ЛД. Это обусловлено разомкнутой конструкцией статора, являющейся причиной появления тормозных усилий, возникновения поперечных сил, стремящихся сместить подвижную часть в поперечном направлении.
Одной из разновидностей асинхронных ЛД является трубчатый линейный двигатель, называемый также коаксиальным или цилиндрическим. Принципиальное отличие эл/привода состоит в круговом расположении обмоток (на рисунке поз.2) относительно постоянных магнитов. При этом магнитные элементы сформированы в виде цилиндра (поз.1). Упрощенно схема линейного двигателя представляет собой трубчатый объем, на который необходимо намотать электрический проводник. Выглядит это следующим образом:

Цилиндрический линейный двигатель не имеет сердечника, являющегося источником излишнего нагрева под воздействием вихревых токов. В нем также не возникает дополнительных усилий в области между электрообмотками и цилиндром. Это способствует более плавному, равномерному движению при любых величинах скорости. Как результат, КПД линейного двигателя трубчатого типа заметно выше, чем аналогичный показатель у плоского привода.
Ввиду симметричной конструкции цилиндрический линейный двигатель не столь чувствителен к неравномерности размеров зазора, что упрощает его монтаж и изготовление. Благодаря симметрии он также превосходит в эффективности использования магнитного поля и требует вдвое меньшего числа редкоземельных магнитных материалов, чем плоский линейный асинхронный двигатель. Это обеспечивает существенную экономию при изготовлении электродвигателя.
Шаговые электромоторы
Линейные шаговые двигатели преобразуют последовательность электрических сигналов не во вращательное, а в поступательное прямолинейное движение. Они применяются в технологиях, требующих перемещения объектов в плоскости. Это могут быть двигатели для ЧПУ станков или графопостроители современных ЭВМ. Использование линейного шагового двигателя упрощает кинематическую схему эл/привода.

Плоский статор изготавливается из магнитомягкого материала. Для подмагничивания магнитопроводов устанавливаются постоянные магниты. Якорь ЛД перемещается в соответствии с принципом аналогичным мотору вращения только в прямолинейном направлении. Для этого на плоскости подвижной и неподвижной части выполнены зубцы равных размеров. В пределах одной секции бегуна линейного шагового двигателя зубцы смещены на половину своей ширины t/2, а во второй части – на четверть t/4. При этом вне зависимости от места расположения бегуна, обеспечивающего процесс подмагничивания, магнитное сопротивление будет оставаться одинаковым.
Линейные шаговые двигатели между статором и подвижной частью имеют минимальный магнитно-воздушный зазор, через который происходит взаимодействие. При этом практически отсутствует сопротивление перемещению, в результате линейный шаговый двигатель обеспечивает высокоточное позиционирование.
Линейный актуатор в традиционном исполнении представляет собой линейные двигатели постоянного тока, выполненные на базе коллекторных моторов. В подобных устройствах вращение преобразовывается в поступательное движение посредством редуктора, гайки и длинного винта, соединенных с выходным валом. В связи с тем, что такая конструкция не способна обеспечить точность перемещения или требуемые параметры скорости применяют электропривод с шаговым двигателем вращения, у которого вместо стандартного вала реализуется одна из следующих конструкций:
- удлиненный вал с внешней гайкой;
- выдвижной шток
- полый вал с внутренней гайкой.
Линейный шаговый двигатель или актуатор первого вида имеет в своей конструкции удлиненный вал с нанесенной на него резьбой и гайку, поступательно перемещающуюся вдоль вала. При этом сама гайка стационарна. Длина винта-вала соответствует длине хода.
Во втором случае линейный шаговый двигатель обеспечивает прямолинейное движение посредством выдвижного штока и соединенного с ним выходного вала с резьбой. Приложение внешней нагрузки производится непосредственно на шток.
Вариант полой центральной части с внутренней гайкой предусматривает установку ходового винта. Последний по мере вращения гайки движется параллельно своей оси и может выходить по обе стороны эл/мотора.
Линейные шаговые двигатели в виде актуаторов предназначены для построения систем с поступательным перемещением объектов с небольшой скоростью и высокой точностью при работе в ограниченных рабочих пространствах.
Моторы внутреннего сгорания
Этот тип моторов кардинально отличается от классического электрического привода, например, такого как асинхронный линейный двигатель, поскольку имеет принципиально иное устройство и метод работы. По сути это двигатель внутреннего сгорания, но без сложного и громоздкого кривошипно-шатунного механизма. Подобные типы линейных двигателей имеют мертвый (неподвижный) замкнутый контур, в объеме которого прямолинейно перемещаются один или два поршня. Свободное перемещение поршневого устройства обеспечивается сжатым воздушным потоком, находящимся в смежных емкостях, пружинным элементом и массой самого поршня.

Линейные двигатели внутреннего сгорания имеют более простое конструктивное исполнение по сравнению с традиционным вариантом с кривошипно-шатунной системой. Они более уравновешенны, долговечны, обладают компактными размерами. На базе приводов этого типа выполняют электрические генераторы, дизель-молоты. Существенным недостатком свободно-поршневых агрегатов является сложный пуск и управление линейным двигателем. Это связано с отсутствием каких-либо жестких связей в составе приводного механизма
В большинстве случаев запуск установки осуществляется посредством сжатого воздуха. В то же время благодаря развитию микропроцессорных технологий проводят эксперименты в части электронного пуска и управления процессом. Такими способами являются:
- применение электрогенератора, который связывается с поршневым устройством;
- использование датчиков давления, движения и иных средств, обеспечивающих контролирование впрыска и зажигания подаваемой вовнутрь топливной смеси;
- электросхема с установкой такого элемента как электромагнитный клапан, размещаемый на вход и выход смеси для четкого контролирования ее объема.
Учитывая перспективность нового направления, многие энтузиасты выполняют расчет линейного механизма, после чего своими подручными средствами и собственными руками создают модели электрических генераторных машин. С этой целью цилиндрами служат трубки из стекла, поршнями становятся бобышки из графита, а источником искры – плата бытового устройства для розжига газовой плиты. При желании можно создать небольшой мотор и успешно его использовать как автономный источник электроэнергии. При этом необходимо учитывать, что при использовании постоянных магнитов должна быть организована достаточная система охлаждения. Это вызвано тем, что магнитные элементы имеют свойство при достижении определенного уровня температуры размагничиваться.
Читайте также:
- Учебная мотивация как необходимое условие эффективности обучения реферат
- Реформы государственного управления за рубежом во второй половине xx века реферат
- Реферат обеспечение безопасности на транспорте
- Анализ сложных систем с помощью моделей клеточных автоматов реферат
- Вегетарианство в спорте реферат