
История создания асинхронного двигателя реферат
Обновлено: 05.07.2024
В настоящее время асинхронные машины используются в основном в режиме двигателя. Машины мощностью больше 0.5 кВт обычно выполняются трёхфазными, а при меньшей мощности – однофазными.
Впервые конструкция трёхфазного асинхронного двигателя была разработана, создана и опробована нашим русским инженером М. О. Доливо-Добровольским в 1889-91 годах.
Демонстрация первых двигателей состоялась на Международной электротехнической выставке во Франкфурте на Майне в сентябре 1891 года. На выставке было представлено три трёхфазных двигателя разной мощности. Самый мощный из них имел мощность 1.5кВт и использовался для приведения во вращение генератора постоянного тока. Конструкция асинхронного двигателя, предложенная Доливо-Добровольским, оказалась очень удачной и является основным видом конструкции этих двигателей до настоящего времени.
За прошедшие годы асинхронные двигатели нашли очень широкое применение в различных отраслях промышленности и сельского хозяйства.
Их используют в электроприводе металлорежущих станков, подъёмно-транспортных машин, транспортёров, насосов, вентиляторов. Маломощные двигатели используются в устройствах автоматики.
Широкое применение асинхронных двигателей объясняется их
достоинствами по сравнению с другими двигателями: высокая надёжность, возможность работы непосредственно от сети переменного тока, простота обслуживания.
5.2. Устройство трёхфазной асинхронной машины
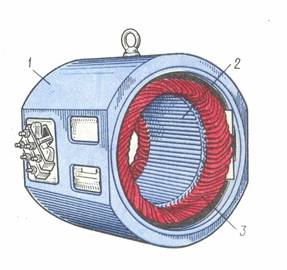
Неподвижная часть машины называется статор, подвижная – ротор. Сердечник статора набирается из листовой электротехнической стали и запрессовывается в станину. На рис. 5.1 показан сердечник статора в сборе. Станина (1) выполняется литой, из немагнитного материала. Чаще всего станину выполняют из чугуна или алюминия. На внутренней поверхности листов (2), из которых выполняется сердечник статора, имеются пазы, в которые закладывается трёхфазная обмотка (3). Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения, реже – из алюминия.
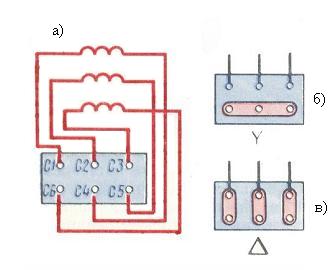
Обмотка статора состоит из трёх отдельных частей, называемых фазами. Начала фаз обозначаются буквами с1, с2, с3, концы – с4, с5, с6.
Начала и концы фаз выведены на клеммник (рис. 5.2 а), закреплённый на станине. Обмотка статора может быть соединена по схеме звезда (рис. 5.2 б) или треугольник (рис. 5.2 в). Выбор схемы соединения обмотки статора зависит от линейного напряжения сети и паспортных данных двигателя. В паспорте трёхфазного двигателя задаются линейные напряжения сети и схема соединения обмотки статора. Например, 660/380, Y/∆. Данный двигатель можно включать в сеть с Uл = 660В по схеме звезда или в сеть с Uл =380В – по схеме треугольник.
Основное назначение обмотки статора – создание в машине вращающего магнитного поля.
Сердечник ротора (рис. 5.3 б) набирается из листов электротехнической стали, на внешней стороне которых имеются пазы, в которые закладывается обмотка ротора. Обмотка ротора бывает двух видов: короткозамкнутая и фазная. Соответственно этому асинхронные двигатели бывают с короткозамкнутым ротором и фазным ротором (с контактными кольцами).
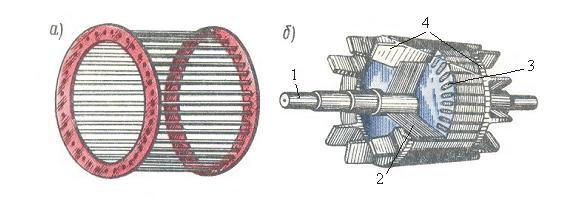
Рис. 5.3
Короткозамкнутая обмотка (рис. 5.3) ротора состоит из стержней 3, которые закладываются в пазы сердечника ротора. С торцов эти стержни замыкаются торцевыми кольцами 4. Такая обмотка напоминает “беличье колесо” и называют её типа “беличьей клетки” (рис. 5.3 а). Двигатель с короткозамкнутым ротором не имеет подвижных контактов. За счёт этого такие двигатели обладают высокой надёжностью. Обмотка ротора выполняется из меди, алюминия, латуни и других материалов.
Доливо-Добровольский первым создал двигатель с короткозамкнутым ротором и исследовал его свойства. Он выяснил, что у таких двигателей есть очень серьёзный недостаток – ограниченный пусковой момент. Доливо-Добровольский назвал причину этого недостатка – сильно закороченный ротор. Им же была предложена конструкция двигателя с фазным ротором.
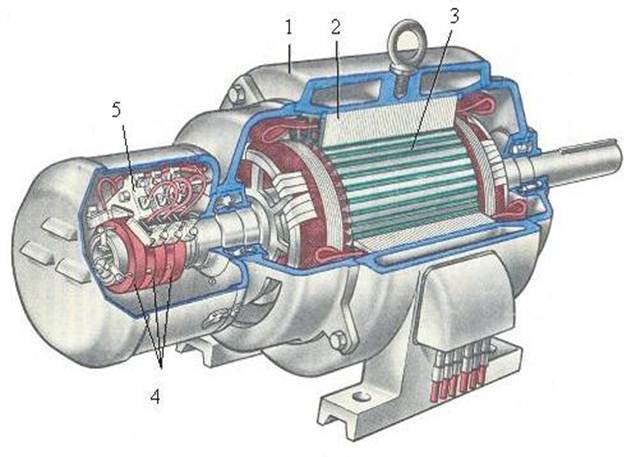
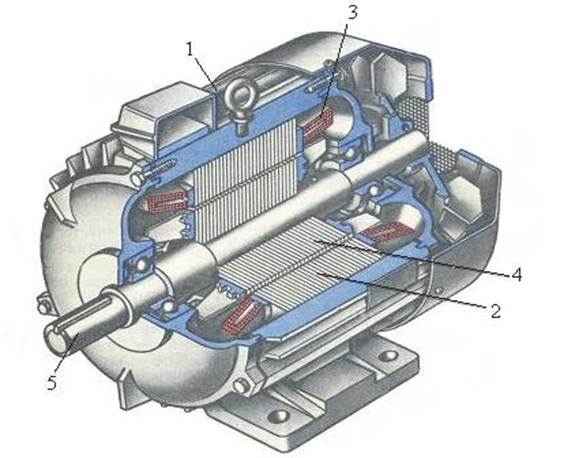
На рис. 5.4 приведен вид асинхронной машины с фазным ротором в разрезе: 1 – станина, 2 – обмотка статора, 3 – ротор, 4 – контактные кольца, 5 – щетки.
У фазного ротора обмотка выполняется трёхфазной, аналогично обмотке статора, с тем же числом пар полюсов. Витки обмотки закладываются в пазы сердечника ротора и соединяются по схеме звезда. Концы каждой фазы соединяются с контактными кольцами, закреплёнными на валу ротора, и через щётки выводятся во внешнюю цепь. Контактные кольца изготавливают из латуни или стали, они должны быть изолированы друг от друга и от вала. В качестве щёток используют металлографитовые щётки, которые прижимаются к контактным кольцам с помощью пружин щёткодержателей, закреплённых неподвижно в корпусе машины. На рис. 5.5 приведено условное обозначение асинхронного двигателя с короткозамкнутым (а) и фазным (б) ротором.
На рис. 5.6 приведен вид асинхронной машины с короткозамкнутым ротором в разрезе: 1 – станина, 2 – сердечник статора, 3 – обмотка статора, 4 – сердечник ротора с короткозамкнутой обмоткой, 5 – вал.
На щитке машины, закреплённом на станине, приводятся данные: Рн, Uн, Iн, nн, а также тип машины.
- Рн – это номинальная полезная мощность (на валу)
- Uн и Iн – номинальные значения линейного напряжения и тока для указанной схемы соединения. Например, 380/220, Y/∆, IнY/Iн∆.
- nн – номинальная частота вращения в об/мин.
Тип машины, например, задан в виде 4AH315S8. Это асинхронный двигатель (А) четвёртой серии защищённого исполнения. Если буква Н отсутствует, то двигатель закрытого исполнения.
Выдающийся русский электротехник М.О.Доливо-Добровольский в 1889г. Предложил трехфазную систему переменного тока, построил первый трехфазный асинхронный двигатель и первый трехфазный трансформатор. На электротехнической выставке во Франкфурте-на-Майне в 1891г. Доливо-Добровольский демонстрировал опытную высоковольтную электропередачу трехфазного тока протяженностью 175 км; трехфазный генератор имел мощность 230 КВт при напряжении 95 В.
Содержание работы
1.История развития асинхронного двигателя
2. Основные понятия
3.Вращающееся магнитное поле.
4.Принцип действия асинхронного двигателя
5.Схема замещения асинхронного двигателя
6.Механическая характеристика асинхронного двигателя
7.Пуск асинхронных двигателей
8.Тормозные режимы работы
9.Энергетические показатели асинхронного двигателя
10. Список литературы
Содержимое работы - 1 файл
Асинхронный двигатель.doc
Алчевский Строительный Техникум
Факультет Крановое дело
Тема: “Асинхронный двигатель”
Студентка групи 1.1
1.История развития асинхронного двигателя
2. Основные понятия
3.Вращающееся магнитное поле.
4.Принцип действия асинхронного двигателя
5.Схема замещения асинхронного двигателя
6.Механическая характеристика асинхронного двигателя
7.Пуск асинхронных двигателей
8.Тормозные режимы работы
9.Энергетические показатели асинхронного двигателя
10. Список литературы
1.История развития асинхронного двигателя
Выдающийся русский электротехник М.О. Доливо-Добровольский в 1889г. Предложил трехфазную систему переменного тока, построил первый трехфазный асинхронный двигатель и первый трехфазный трансформатор. На электротехнической выставке во Франкфурте-на-Майне в 1891г. Доливо-Добровольский демонстрировал опытную высоковольтную электропередачу трехфазного тока протяженностью 175 км; трехфазный генератор имел мощность 230 КВт при напряжении 95 В.
В дальнейшем начали применять масляные трансформаторы, так как было установлено, что масло является не только хорошей изоляцией, но и хорошей охлаждающей средой для трансформаторов.
Асинхронный двигатель трехфазного тока представляет собой электрическую машину, служащую для преобразования электрической энергии трехфазного тока в механическую. Благодаря простоте устройства, высокой надежности и эксплуатации и меньшей стоимостью по сравнению с другими двигателями асинхронные двигатели трехфазного тока нашли широкое применение в промышленности и сельском хозяйстве. С их помощью приводятся в движение металлорежущие и деревообрабатывающие станки, подъемные краны, лебедки, лифты, эскалаторы, насосы, вентиляторы и другие механизмы.
Двигатель имеет две основные части: неподвижную – статор и вращающуюся – ротор. Статор состоит из корпуса, представляющего собой основание всего двигателя. Он должен обладать достаточной механической прочностью и выполняется из стали, чугуна и алюминия. С помощью лап двигатель крепится к фундаменту или непосредственно к станине производственного механизма. Существуют и другие способы крепления двигателя к производственному механизму.
В корпус вмонтирован сердечник статора, представляющий собой полый цилиндр, на внутренней поверхности которого имеются пазы с обмоткой статора. Часть обмотки, находящейся вне пазов, называется лобовой; она отогнута к торцам сердечника статора. Так как в сердечнике статора действует переменный магнитный поток и на статор действует момент, развиваемый двигателем, сердечник должен изготовляться из ферромагнитного материала достаточной механической прочности. Для уменьшения потерь от вихревых токов сердечник статора собирают из отдельных листов (толщиной 0,35 – 0,5 мм) электротехнической стали и каждый лист изолируют лаком или другим изоляционным материалом.
Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения, реже – из алюминиевого провода. В качестве изоляции проводов друг от друга используют бумагу и хлопчатобумажную ткань, пропитанные различными лаками, слюда, стекловолокно и различные эмали. Для изоляции проводов обмотки от сердечника статора служат электроизоляционный картон, слюда, асбест, стекловолокно.
Обмотка статора состоит из трех отдельных частей, называемых фазами. Фазы могут быть соединены между собой звездой или треугольником. Как правило, начала обмоток на схемах обозначаются буквами А, В, С, концы – X, Y, Z. Обмотки двигателей малой и средней мощности изготовляют на напряжения 380/220 и 220/127 В. Напряжение, указанное в числителе, соответствует соединению обмоток звездой, в знаменателе – треугольником. Таким образом, один и тот же двигатель при соответствующей схеме соединения его обмоток может быть включен в сеть на любое указанное в паспорте напряжение. Существуют двигатели на 500, 660 и 1140 В. Двигатели высокого напряжения изготовляют на напряжения 3000 и 6000 В.
На корпусе двигателя имеется доска с зажимами, с помощью которых обмотка присоединяется к трехфазной сети. К каждому зажиму подключен соответствующий вывод обмотки. Для зажимов приняты следующие обозначения: зажимы, к которым подключены начала обмоток, обозначают буквами С1, С2 и С3, концы обмоток – соответственно С4, С5 и С6.
Сердечник ротора представляет собой цилиндр, собранный из отдельных листов электротехнической стали, в котором имеются пазы с обмоткой ротора.
Обмотки ротора бывают двух видов – короткозамкнутые и фазные. Соответственно этому различают асинхронные двигатели с короткозамкнутым и фазным ротором (с контактными кольцами). Короткозамкнутая обмотка состоит из стержней, расположенных в пазах, и замыкающих колец. Стержни присоединены к замыкающим кольцам, в результате чего обмотка оказывается короткозамкнутой. Стержни и замыкающие кольца в одних двигателях изготовляются из меди, в других из – алюминия, в третьих из бронзы и т.д. Алюминиевую обмотку получают путем заливки в пазы жидкого алюминия.
Фазную обмотку ротора выполняют так же, как и обмотку статора. Она всегда соединяется звездой. Начала фаз обмоток присоединяют к контактным кольцам, которые изготавливают из стали или латуни и располагают на валу двигателя. Кольца изолированы друг от друга, а также от вала двигателя. К кольцам прижимаются пружинами металлографитные щетки, расположенные в неподвижных щеткодержателях. С помощью контактных колец и щеток в цепь ротора включается дополнительный резистор, который является или пусковым (для увеличения пускового момента и одновременного уменьшения пускового тока) или регулировочным (для изменения частоты вращения ротора двигателя).
Вал ротора изготовлен из стали и вращается в шариковых или роликовых подшипниках. Подшипники укреплены в подшипниковых щитах, которые изготовлены из чугуна или стали и прикрепляются к корпусу болтами.
Тепловая энергия, возникающая в двигателе в результате потерь электрической энергии в его обмотках и магнитопроводе, нагревает двигатель. Для увеличения теплоотдачи ротор снабжен крыльчаткой, прикрепленной к замыкающим кольцам короткозамкнутой обмотки. Крыльчатка обеспечивает интенсивное движение воздуха внутри и снаружи двигателя.
3.Вращающееся магнитное поле.
Допустим в начале, что все проводники статора двухполюсного асинхронного двигателя размещены в двух диаметрально расположенных пазах и в обмотке действует постоянный ток.
Магнитная цепь двигателя содержит ферромагнитные участки: сердечник статора и ротора и воздушный зазор между ротором и статором.
Для любой линии магнитной индукции по закону полного тока можно записать
2H0l0 + Hстlст = У Iw,
где H0, Hст – напряженности магнитного поля соответственно в воздушном зазоре (l0 ) и в участках сердечников ротора и статора ( lст ); Iw – МДС одной фазы обмотки.
Следует отметить, что B и H в различных участках сердечника статора и ротора неодинаковые, например, в зубцах между пазами статора, а также ротора они имеют наибольшее значение, поскольку сечение магнитопровода в зубцах наименьшее.
Так как H = B/мa, а мa >> м0 , то H0 >> Hст и, следовательно,
2H0l0 >> Hстlст.
Поэтому для упрощения анализа картины магнитного поля асинхронного двигателя можно полагать, что
2H0l0 ≈ У I w,
H0 = У I w/2l0,
и магнитная индукция в воздушном зазоре
B0 = м0 Н0 .
Поскольку воздушный зазор одинаков по всей длине напряженность и магнитная индукция вдоль всего зазора будут иметь одинаковые значения.
Проводники второй и третьей фаз обмотки создают аналогичные магнитные поля, но сдвинутые в пространстве на угол 120 о . Если одну фазу обмотки подключить к сети однофазного тока, где напряжение изменяется во времени синусоидально, то магнитное поле будет изменятся во времени синусоидально с частотой тока сети. Таким образом, магнитное поле, созданное синусоидальным током одной фазы, распределяется вдоль воздушного зазора примерно синусоидально, неподвижно в пространстве и изменяется во времени.
Обмотка статора асинхронного двигателя соединяется звездой или треугольником и подключается к сети трехфазного тока. Поскольку каждая фаза обмотки имеет одинаковое число витков и они симметрично расположены по окружности статора, их сопротивление и амплитуда тока будут одинаковыми, но токи в фазах обмотки будут сдвинуты по времени относительно друг друга на 120 о . Токи каждой фазы обмотки создадут магнитные поля, которые, очевидно, будут сдвинуты во времени на тот же угол. В результате сложения двух магнитных полей всех фаз образуется общее магнитное поле двигателя. Магнитная индукция результирующего магнитного поля оказывается распределенной вдоль воздушного зазора также по синусоиде, ее амплитуда не изменится во времени и в 1,5 раза больше амплитуды магнитной индукции одной фазы. Результирующее поле вращается с постоянной частотой.
4.Принцип действия асинхронного двигателя
В обмотке статора, включенной в сеть трехфазного тока, под действием напряжения возникает переменный ток, который создает вращающееся магнитное поле. Магнитное поле пересекает проводники обмотки ротора и наводит в них переменную ЭДС, направление которой определяется по правилу правой руки. Поскольку обмотка ротора замкнута, ЭДС вызывает в ней ток того же направления.
В результате взаимодействия тока ротора с вращающимся магнитным полем возникает сила, действующая на проводники ротора, направление которой определяется по правилу левой руки. Сила создает момент, действующий в сторону.
Под действием момента ротор приводит в движение и после разбега вращается в том же направлении, что и магнитное поле, с несколько меньшей частотой вращения, чем поле:
n = (0,92 ÷ 0,98)n*0.
Все сказанное о принципе действия асинхронного двигателя справедливо, если обмотка ротора выполнена из ферромагнитного материала с теми же магнитными свойствами, что и сердечник ротора. В действительности обмотка ротора выполняется из неферромагнитного материала (меди или алюминия), поэтому магнитная индукция в пазу с проводниками намного меньше, чем в зубцах. Основная сила, вызывающая момент вращения, возникает в результате взаимодействия магнитного поля ротора с вращающимся магнитным полем статора и приложена к зубцам ротора. На проводник действует только небольшая сила. Однако для анализа работы двигателя и получения расчетных уравнений обычно считают, что в основе принципа действия асинхронного двигателя лежит закон Ампера – взаимодействие проводника с током и магнитного поля. Такая трактовка закономерна, поскольку результаты расчета при этом совпадают с полученными из принципа взаимодействия магнитных полей ротора и статора.
5.Схема замещения асинхронного двигателя
Для анализа работы асинхронного двигателя пользуются схемой замещения. Схема замещения асинхронного двигателя аналогична схеме замещения трансформатора и представляет собой электрическую схему, в которой вторичная цепь (обмотка ротора) соединена с первичной цепью (обмоткой статора) гальванически вместо магнитной связи, существующей в двигателе.
Основное отличие асинхронного двигателя от трансформатора в электрическом отношении состоит в следующем. Если в трансформаторе энергия, переданная переменным магнитным полем во вторичную цепь, поступает к потребителю в виде электрической энергии, то в асинхронном двигателе энергия, переданная вращающимся магнитным полем ротору, преобразуется в механическую и отдается валом двигателя потребителю в виде механической энергии.
Асинхронный двигатель – наиболее эффективная машина для преобразования электрической энергии в механическую. Изобретенный более сотни лет назад, электромотор до сих пор не теряет актуальности, а принцип его работы практически не изменился.
1888 год. Итальянский электротехник Галилео Феррарис публикует статью, адресованную Королевской академии наук в Турине, где просит обратить внимание на свое исследование, результате которого изобретатель смог получить первые теоретические основы работы асинхронного двигателя. В это же время в США Никола Тесла получает патент на основании той же информации.

Уже в 1903 году в городе Новороссийск построили первый в истории элеватор, который был оснащен сетью переменного трехфазного тока. Процесс оснащения происходил под четким руководством самого изобретателя.
Сегодня машина, изобретенная Доливо-Добровольским с подачи Феррариса – наиболее распространенный тип моторов в мире. Область применения асинхронного двигателя чрезвычайно широка. Для приведения в движения оборудование на производстве используют трехфазные двигатели.
Как и у любого электродвигателя, у асинхронного есть две главные детали – ротор и статор. Это базовые элементы для превращения электрической энергии в механическую.
Статор – часть двигателя, остающаяся неподвижной. На его внутренней стороне есть специальные пазы, где уложена трехфазная обмотка. Ее питает трехфазный ток.
Ротор – часть машины, которая во время работы приходит в движение. В его пазы тоже укладывают обмотку.
Обе детали, статичная и подвижная, производятся из электротехнической стали. Если точнее, то из листов, толщина которых составляет от 0,35 мм до 0,5 мм. Каждый лист при этом изолирован от другого с помощью толстого лакового покрытия.
Что касается зазоров, между ротором и статором и делают минимальными: для менее мощных моторов от 0,3 мм до 0,35 мм, а для более мощных машин – от 1 мм до 1,5 мм.
Все асинхронные электродвигатели делятся на два вида: с короткозамкнутым ротором и с фазным. Из названия понятно, что принципиальное различие устройств заключается в строении самого ротора. Большей популярностью пользуются двигатели с короткозамкнутым типом ротора. Причина этому незамысловата: их конструкция несколько проще.
Обмотка статора асинхронного двигателя
Обмотку статора в таком двигателе, как уже сказано выше, укладывают в специальные пазы. Сама она сделана из нескольких соединенных катушек. Витки, из которых состоит катушка, полностью изолированы.
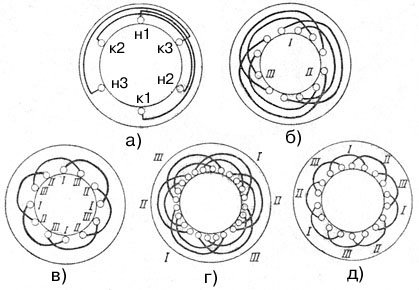
На рисунке 1а изображена обмотка статора в асинхронном электродвигателе. Во всех катушках здесь два проводника: статор двухполюсный. Обмотка из трех катушек может создать магнитное поле и два полюса. Один период трехфазного тока равен одному обороту магнитного поля. То есть, если частота равна 50 Гц, то количество оборотов составит 50 раз в секунду (3000 в минуту).
На рисунке 1б изображена обмотка, где на каждой стороне катушки по два проводника. Это четырехполюсный статор. Его магнитное поле вращается в два раза медленнее, чем у двухполюсного. Это означает, что при той же частоте 50 Гц, поле сделает 25 оборотов за секунду (1500 в минуту). Четырехполюсный статор с обмоткой, где на полюс и фазу приходится по одному проводку изображен на рисунке 1в. На рисунке 1г на полюс и фазу такого же статора приходится по два проводника.
Если статор шестиполюсный, то его скорость будет уже в три раза меньше, чем скорость предыдущего (1000 оборотов в минуту при неизменной частоте 50 Гц). Шестиполюсный статор, где на полюс и фазу приходится по одному проводку изображен на рисунке 1д.
Устройство электродвигателя с короткозамкнутым ротором
Наиболее популярный тип двигателя, с короткозамкнутым ротором, имеет следующее строение (рисунок 2). Трехфазную обмотку (2) укладывают на статор (неподвижную часть электромотора) (1). Обмотка питается трехфазным током. Каждое начало всех фаз выведено на общий щиток. Его укрепляют на наружной стороне корпуса электродвигателя.
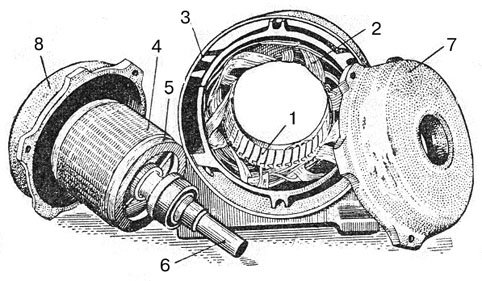
Сердечник статической части агрегата собирают и размещают внутри корпуса (3), выполненного из чугуна. В пазы подвижного якоря (второе название ротора) (4)укладывают стержни из меди. С каждой стороны они припаяны к кольцам (они тоже из меди) (5).
Получается, что каждый стержень оказывается накоротко замкнутым с двух сторон. Если изобразить обмотку ротора данного типа, то ее внешний вид напоминает беличье колесо.
Во всех двигателях, мощность которых не более 100 кВт, такая обмотка изготовлена из алюминия. Под давлением его заливают в каждый паз ротора.
Вращение вала (6) происходит в подшипниках. Последние, в свою очередь, закреплены в специальных щитах (7,8). Подшипниковые щиты закреплены на корпусе электродвигателя с помощью болтов. Чтобы вращение вала передалось станку или машине, на один из его концов насажен шкив.
Устройство фазного ротора

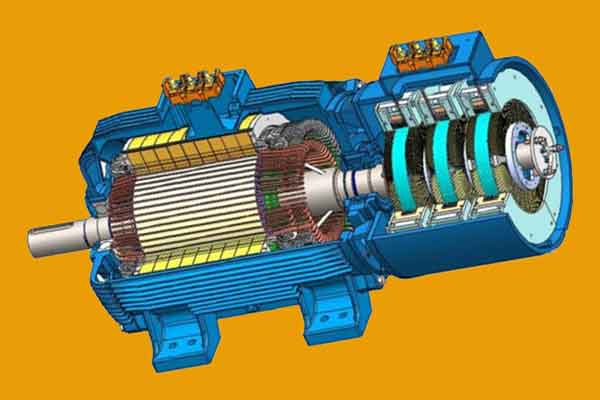
Разрез асинхронного двигателя с фазным ротором. Рисунок 4 1 — вал двигателя, 2 — ротор, 3 — обмотка ротора, 4 — статор, 5 — обмотка статора, 6 — корпус, 7 — подшипниковые крышки, 8 — вентилятор, 9 — контактные кольца
Фазный ротор характерен наличием трех фазных обмоток. Они, зачастую, соединяются по схеме звезды (иногда по схеме треугольника). Каждый конец фазной обмотки присоединен к медному кольцу. Кольца же укрепляются на валу и изолируются. Это дало двигателю еще одно название: асинхронный электродвигатель с контактными кольцами. Всего кольца три. Их плотно насаживают на вал с помощью изоляционных прокладок. На кольца наложены щетки (они расположены в щеткодержателе, в свою очередь укрепленных на крышке подшипника).
Щетки всегда имеют исправный электроконтакт с кольцами. Это соединяет их с самой обмотками якоря. Между собой щетки соединяет трехфазный реостат.
Объяснение этому явлению можно дать такое: вращаясь вокруг диска, магнит способен возбудить в нем токи Фуко (индукционные). Их траектория – замкнутый круг. Индукционные токи не имеют начала и конца. Их можно назвать токами короткого замыкания, разогревающими металл. Как правило, от них нужно избавляться, но в этом случае именно они и являются причиной появления магнитного поля в диске. Далее это поле начинает взаимодействие уже с полем самого постоянного магнита.
Асинхронные электромоторы работают по такому же принципу, но вращающееся поле создает не магнит, а обмотка статора. В ней, собственно, и создается подходящее для вращения поле.
Подобные условия возможно создать только в системе с несколькими фазами, где ток сдвигается на несколько градусов. В бытовых электроприборах двигатели обычно с двумя фазами, причем вторую создают искусственно. Для этого используют сдвигающий конденсатор, катушку или сопротивление. Электродвигатели, используемые на промышленных предприятиях, выпускают с тремя фазами.
В самом первом трехфазном асинхронном электродвигателе было три обмотки. Они были удалены друг от друга на 120 градусов. Схема работы такого двигателя и синусоидальный ток трех его полюсов показан на рисунке 4.
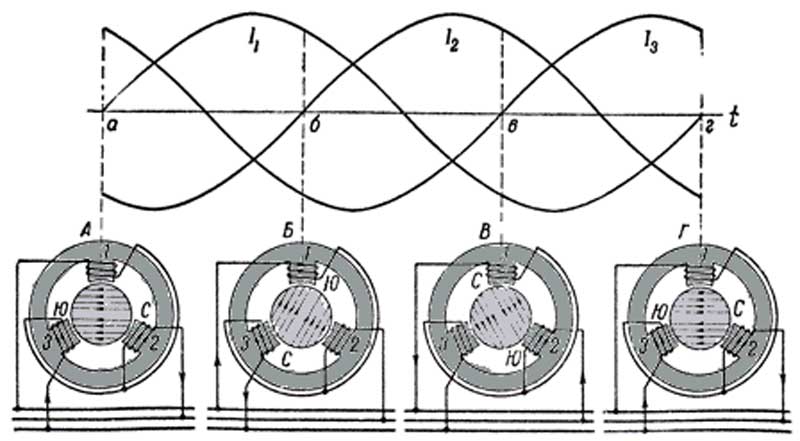
Итак, в тот момент, когда в одной из фаз ток нулевой, в остальных он принимает максимальные значения, при этом фазы отличаются по направлению тока. Таким образом и создается магнитное поле между двумя из трех обмоток. Далее все тут же меняется: один полюс отключается, а другой, тот что остался работать, начинает менять полярность. Это происходит из-за изменения направления тока в обмотке. А тот полюс, что только перешел в рабочее состояние, поддержит смещение поля. Благодаря этому в якоре машины формируются вихревые токи (так как линии магнитного поля пересекают часть ротора). Токи входят во взаимодействие с полем статора, которое уже вращается, пытаются его как бы догнать. Происходит поворот ротора.
Стоит также упомянуть о том, что такое схема замещения асинхронного двигателя. Ее часто используют в электротехнике во время проведения расчетов. Вместо самого электродвигателя подставляют эквивалентную схему, где электромагнитную связь замещает электрическая.
Питающее напряжение у разных потребителей разное, из-за этого время от времени электрическое оборудование приходится переподключать. Предложенная ниже инструкция поможет безопасно подключить электродвигатель на 220 В.
Задача достаточно проста. Главное в этом деле – не ошибиться при подключении обмоток. Классификация двигателей включает в себя два типа:
- трехфазного с обмоткой (схема включения звезда или треугольник);
- однофазного (у него пусковая обмотка).
Их способы подключения мы и рассмотрим.
Включение в сеть трехфазного двигателя
Отличительная черта асинхронного двигателя – простая конструкция относительно других видов электромашин. Его распространенность можно также объяснить его надежностью и износоустойчивостью. Асинхронный двигатель переменного тока имеет очень простую конструкцию по сравнению с другими видами электрических машин. Он довольно надежен, чем и объясняется его популярность. К переменному напряжению такой включают по схеме звезды или треугольника. Первую схему используют чаще. Рабочее напряжение электромоторов тоже отличается:
- 220–380 В;
- 380–660 В;
- 127–220 В.
Так как же подключить машину, не спалив обмотку?
Нужное напряжение
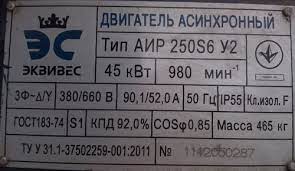
Убедитесь в том, что электродвигатель соответствуем всем требованиям. Их можно найти на табличке на внешней стороне корпуса агрегата. Там указаны такие характеристики как мощность, напряжение, на которое рассчитан агрегат, коэффициент мощности конкретного асинхронного двигателя. Важно, чтобы одним из параметров было напряжение 220 В. Затем узнайте тип подключения обмоток. Для низких напряжений используют схему звезда, а для высоких – треугольник.
Для высокого напряжения
Допустим табличка имеет следующие данные: Δ/Ỵ220/380. Эта надпись говорит о том, что двигателю требуется подключение треугольником. При наличии клеммной коробки сделать это не составит труда. Перемычки просто переключатся в требуемое положение.
Если клеммная коробка отсутствует и перед вами лишь провода, весь агрегат придется разобрать. Когда доберетесь до статора, увидите три конца проводов, они будут спаяны. Вы нашли соединение по схеме звезды. Их нужно отсоединить друг от друга и подключить по схеме треугольника.
В целом, это не очень сложно. Помните о том, что у катушки есть начало и конец, не путайте их. Если начало – это, то, что выведено в борно двигателя, значит, спаяны концы.
Подключение происходит так: конец одной катушки спаивается с началом другой.
С помощью таких нехитрых манипуляций, мы сделали двигатель, предназначенный для напряжения 380 В, пригодным для подключения к сети 220 В.
Для низкого напряжения
Разведите все концы и с помощью омметра отыщите катушки статора.
Пометьте их с помощью скотча или цветной изоленты. Возможно, это пригодится еще не раз.
Возьмите батарейку и подключите ее к а1-а2. к в1-в2 подключите омметр.
Когда контакт с батарейкой будет разорван, стрелка на омметре сдвинется в сторону. Запомните, куда именно указала стрелка и присоедините прибор к с1-с2. Полярность менять не нужно. Проделайте все снова.
Стрелка может качнуться в другую сторону. В этом случае провода нужно поменять местами, и сменить маркировку. Стрелка должна отклоняться только в одну сторону.
Батарейка, на которой соблюдена полярность, соединяется с с1-с2, а измерительный прибор с а1-а2.
Теперь все нужно перепроверить. Стрелка должна отклоняться одинаково на всех катушках. Если все верно, пучок с одинаковыми цифрами (допустим, 1) — это начало, с цифрой 2 – конец.
Все три конца (а2, в2, с2) нужно соединить и изолировать. Это и есть соединение по схеме звезды. Его можно вывести на клеммник, сделать маркировку для удобства, нарисовать или наклеить схему, по которой соединены обмотки.
Подключение однофазных асинхронных двигателей
Еще один вид асинхронных электромашин – однофазные электродвигатели переменного тока. У таких моторов есть лишь две обмотки, причем, работает после запуска лишь одна. У таких двигателей есть некоторые особенности, их мы и рассмотрим.
Такие агрегаты еще называют электродвигателями с расщепленной фазой. На их статоре присутствует смещенная обмотка (относительно основной) – она является вспомогательной. Запустить машину помогает фазосдвигающий конденсатор.
Очень важно обращать внимание на табличку с характеристиками агрегата. Даже если вы видите три провода, это еще не показатель того, что двигатель можно включать в сеть на 380 В. Рискуете спалить обмотку – это основная неисправность подобных двигателей.
Включаем однофазный двигатель в сеть
Первым делом определяем середину катушек – это место соединения. Сделать это легко по цвету проводов.
Если все концы выведены нормально, то никаких проблем с подключением не возникнет. Если нет, то все немного усложняется.
Попробуйте прозвонить концы катушек омметром. Наибольшее значение сопротивления говорит о двух последовательно соединенных катушках. Их нужно как-то пометить. Следим за прибором дальше. У пусковой катушки в исправном состоянии сопротивление всегда выше, чем у той, что работает. После этого подключается конденсатор.
Готово, однофазный двигатель можно включать в сеть.
Уже не раз было сказано, что асинхронные двигатели – наиболее распространенный тип электромоторов на предприятиях. Из всего современного оборудования доля асинхронных агрегатов составляет 95%, в оставшиеся пять помещается более пяти видов разных электродвигателей. Каковы плюсы и минусы оборудования и почему оно так популярно?
Положительные характеристики асинхронного двигателя
- Часто выбор асинхронного двигателя связан с простотой конструкции – это его главное достоинство. Это объясняет не только трехфазная система снабжения электричеством, но и принцип действия машины. Из этого вытекает и другая положительная черта электродвигателя – невысокая цена. Из всех типов двигателей именно данный будет наиболее бюджетным.
- Для того чтобы сформировать вращающееся магнитное поле в трехфазном электродвигателе, не требуются никакие дополнительные детали и элементы. Сама конструкция машины обусловливает вращение поля в статоре, из чего происходит движение ротора. Чтобы это осуществить нужно лишь подать напряжение с помощью контактора или пускателя и электродвигатель заработает.
- Диагностика и обслуживание асинхронных двигателей не вызывает затруднений, а эксплуатационные затраты на машину совсем невелики. Если двигатель правильно установлен и его режим работы соответствует правилам, менять подшипники нужно не чаще, чем раз в 15 лет.
Отрицательные моменты в эксплуатации асинхронных двигателей
- Зависимость скорости вращения ротора от того, сколько полюсов в обмотке статора и от частоты сети, которая питает двигатель. Если работа предусматривает смену скоростей, то это может стать существенным недостатком. Чтобы подобных проблем не было, существует двухскоростной асинхронный двигатель.
- Эффект скольжения. Ротор вращается с меньшей частотой относительно поля в статоре. В этом состоит весь принцип работы машины. Скольжение еще имеет зависимость от нагрузки на вал. При желании эту проблему можно решить с помощью прибора для преобразования частоты.
- Если помещение, сырое, использование двигателя такого типа может быть невозможным. Во влажных помещениях требования к электрической безопасности, как правило, особенно серьезные. А технические характеристики асинхронных двигателей, к сожалению, не позволяют агрегатам работать при напряжении меньше 220В.
- Еще один недостаток – двигатель очень чувствителен к напряжению в сети. Если сеть в помещении, где применяется агрегат, нестабильна, при отклонении напряжения от нормы машина может перегреться, а динамическая характеристика изменится.
- Большая величина пускового тока тоже является значимой проблемой. Во время запуска он может превышать нормальное значение даже в восемь раз. Поэтому мощные двигатели не рекомендуют подключать к сети напрямую. Пусковой ток. Большой пусковой ток – проблема асинхронных двигателей мощностью более 10 кВт. При пуске ток может превышать номинальный в 5-8 раз и длиться несколько секунд. Из-за этого негативного эффекта мощные двигатели нежелательно подключать напрямую. У двигателей с фазным ротором таких проблем нет.
Анализируя преимущества и недостатки асинхронного двигателя можно смело говорить о том, что плюсы использования агрегата сильно перевешивают все негативные моменты.
Неподвижная часть машины называется статор, подвижная – ротор. Сердечник статора набирается из листовой электротехнической стали и запрессовывается в станину. На рис. 2.1 показан сердечник статора в сборе. Станина (1) выполняется литой, из немагнитного материала. Чаще всего станину выполняют из чугуна или алюминия. На внутренней поверхности листов (2), из которых выполняется сердечник статора, имеются пазы, в которые закладывается трёхфазная обмотка (3). Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения, реже – из алюминия.
Обмотка статора состоит из трёх отдельных частей, называемых фазами. Начала фаз обозначаются буквами с1, с2, с3, концы – с4, с5, с6.

Начала и концы фаз выведены на клеммник (рис. 2.2 а), закреплённый на станине. Обмотка статора может быть соединена по схеме звезда (рис. 2.2 б) или треугольник (рис. 2.2 в). Выбор схемы соединения обмотки статора зависит от линейного напряжения сети и паспортных данных двигателя. В паспорте трёхфазного двигателя задаются линейные напряжения сети и схема соединения обмотки статора. Например, 660/380, Y/∆. Данный двигатель можно включать в сеть с Uл = 660В по схеме звезда или в сеть с Uл =380В – по схеме треугольник.
Основное назначение обмотки статора – создание в машине вращающего магнитного поля.

Сердечник ротора (рис. 2.3 б) набирается из листов электротехнической стали, на внешней стороне которых имеются пазы, в которые закладывается обмотка ротора. Обмотка ротора бывает двух видов: короткозамкнутая и фазная. Соответственно этому асинхронные двигатели бывают с короткозамкнутым ротором и фазным ротором (с контактными кольцами).

Доливо-Добровольский первым создал двигатель с короткозамкнутым ротором и исследовал его свойства. Он выяснил, что у таких двигателей есть очень серьёзный недостаток – ограниченный пусковой момент. Доливо-Добровольский назвал причину этого недостатка – сильно закороченный ротор. Им же была предложена конструкция двигателя с фазным ротором.
На рис. 2.4 приведен вид асинхронной машины с фазным ротором в разрезе: 1 – станина, 2 – обмотка статора, 3 – ротор, 4 – контактные кольца, 5 – щетки.

У фазного ротора обмотка выполняется трёхфазной, аналогично обмотке статора, с тем же числом пар полюсов. Витки обмотки закладываются в пазы сердечника ротора и соединяются по схеме звезда. Концы каждой фазы соединяются с контактными кольцами, закреплёнными на валу ротора, и через щётки выводятся во внешнюю цепь. Контактные кольца изготавливают из латуни или стали, они должны быть изолированы друг от друга и от вала. В качестве щёток используют металлографитовые щётки, которые прижимаются к контактным кольцам с помощью пружин щёткодержателей, закреплённых неподвижно в корпусе машины. На рис. 2.5 приведено условное обозначение асинхронного двигателя с короткозамкнутым (а) и фазным (б) ротором.

На рис. 2.6 приведен вид асинхронной машины с короткозамкнутым ротором в разрезе: 1 – станина, 2 – сердечник статора, 3 – обмотка статора, 4 – сердечник ротора с короткозамкнутой обмоткой, 5 – вал.

На щитке машины, закреплённом на станине, приводятся данные: Рн, Uн, Iн, nн, а также тип машины.
Рн – это номинальная полезная мощность (на валу)
Uн и Iн – номинальные значения линейного напряжения и тока для указанной схемы соединения. Например, 380/220, Y/∆, IнY/Iн∆.
nн – номинальная частота вращения в об/мин.
Тип машины, например, задан в виде 4AH315S8. Это асинхронный двигатель (А) четвёртой серии защищённого исполнения. Если буква Н отсутствует, то двигатель закрытого исполнения.
315 – высота оси вращения в мм;
S – установочные размеры (они задаются в справочнике);
8 – число полюсов машины.
Получение вращающегося магнитного поля
наличие не менее двух обмоток;
токи в обмотках должны отличаться по фазе
оси обмоток должны быть смещены в пространстве.
В трёхфазной машине при одной паре полюсов (р=1) оси обмоток должны быть смещены в пространстве на угол 120°, при двух парах полюсов (р=2) оси обмоток должны быть смещены в пространстве на угол 60° и т.д.
Рассмотрим магнитное поле, которое создаётся с помощью трёхфазной обмотки, имеющей одну пару полюсов (р=1) (рис. 2.7). Оси обмоток фаз смещены в пространстве на угол 120° и создаваемые ими магнитные индукции отдельных фаз (BA, BB, BC) смещены в пространстве тоже на угол 120°.
Магнитные индукции полей, создаваемые каждой фазой, как и напряжения, подведённые к этим фазам, являются синусоидальными и отличаются по фазе на угол 120°.
Приняв начальную фазу индукции в фазе А (φA) равной нулю, можно записать:


Магнитная индукция результирующего магнитного поля определяется векторной суммой этих трёх магнитных индукций.

Найдём результирующую магнитную индукцию (рис. 2.8) с помощью векторных диаграмм, построив их для нескольких моментов времени.

а) При

t=0


б) При




в) При



Как следует из рис. 2.8, магнитная индукция B результирующего магнитного поля машины вращается, оставаясь неизменной по величине. Таким образом, трёхфазная обмотка статора создаёт в машине круговое вращающееся магнитное поле. Направление вращения магнитного поля зависит от порядка чередования фаз. Величина результирующей магнитной индукции

Частота вращения магнитного поля n0 зависит от частоты сети f и числа пар полюсов магнитного поля р.
n0 = (60 f) / p, [об/мин].
Обратите внимание, что частота вращения магнитного поля не зависит от режима работы асинхронной машины и её нагрузки.
При анализе работы асинхронной машины часто используют понятие о скорости вращения магнитного поля ω0, которая определяется соотношением:
ω0 = (2 π f) / p = π n0 / 30, [рад/сек].
Режимы работы трёхфазной асинхронной машины
Асинхронная машина может работать в режимах двигателя, генератора и электромагнитного тормоза.
Режим двигателя
Этот режим служит для преобразования потребляемой из сети электрической энергии в механическую.

Пусть под действием электромагнитного момента ротор начал вращаться с частотой вращения магнитного поля (n = n0). При этом в обмотке ротора ЭДС E2 будет равна нулю. Ток в обмотке ротора I2 = 0, электромагнитный момент M тоже станет равным нулю. За счёт этого ротор станет вращаться медленнее, в обмотке ротора появится ЭДС, ток. Возникнет электромагнитный момент. Таким образом, в режиме двигателя ротор будет вращаться несинхронно с магнитным полем. Частота вращения ротора будет изменяться при изменении нагрузки на валу. Отсюда появилось название двигателя – асинхронный (несинхронный). При увеличении нагрузки на валу двигатель должен развивать больший вращающий момент, а это происходит при снижении частоты вращения ротора. В отличие от частоты вращения ротора частота вращения магнитного поля не зависит от нагрузки. Для сравнения частоты вращения магнитного поля n0 и ротора n ввели коэффициент, который назвали скольжением и обозначили буквой S. Скольжение может измеряться в относительных единицах и в процентах.
S = (n0 – n) / n0 или S = [(n0 – n) / n0] 100%
При пуске в ход асинхронного двигателя n=0, S=1. В режиме идеального холостого хода n = n0, S=0. Таким образом, в режиме двигателя скольжение изменяется в пределах:
0 n0). Этот режим может наступить, например, при регулировании частоты вращения ротора.
Пусть n > n0. При этом изменится (по сравнению с режимом двигателя) направление ЭДС и тока ротора, а также изменится направление электромагнитной силы и электромагнитного момента (рис. 2.10). Машина начинает развивать на валу тормозной момент (потребляет механическую энергию) и возвращает в сеть электрическую энергию (изменилось направление тока ротора, т.е. направление передачи электрической энергии).

Таким образом, в режиме генератора скольжение изменяется в пределах:
Режим электромагнитного тормоза
Этот режим работы наступает, если ротор и магнитное поле вращаются в разные стороны. Этот режим работы имеет место при реверсе асинхронного двигателя, когда изменяют порядок чередования фаз, т.е. изменяется направление вращения магнитного поля, а ротор по инерции вращается в прежнем направлении.
Согласно рис. 2.11 электромагнитная сила будет создавать тормозной электромагнитный момент, под действием которого будет снижаться частота вращения ротора, а затем произойдёт реверс.
В режиме электромагнитного тормоза машина потребляет механическую энергию, развивая на валу тормозной момент, и одновременно потребляет из сети электрическую энергию. Вся эта энергия идёт на нагрев машины.

Таким образом, в режиме электромагнитного тормоза скольжение изменяется в пределах:
0 > R2, угол ψ2 близок к 90° (рис. 2.13 а).

За счет малого cosψ2 в момент пуска в ход асинхронные двигатели имеют ограниченный пусковой момент. Кратность пускового момента (по сравнению с номинальным) у них составляет
Мпуск / Mн = 0,8 ÷ 1,8.
Причем большие цифры относятся к двигателям специальной конструкции с улучшенными пусковыми свойствами.
По мере разгона ротора двигателя частота тока ротора падает, уменьшается индуктивное сопротивление ротора Х2S и угол ψ2 уменьшается (рис. 2.13 б). Это приводит к увеличению вращающего момента и дальнейшему разгону двигателя.
Подставим в выражение для электромагнитного момента соотношения для I2, cosψ2 и Ф, полученные ранее:
,


где: ктр – коэффициент трансформации асинхронной машины.
Выразим Е2 =E1 / ктр, а Е1 приравняем к напряжению U1, подведенному к обмотке статора (Е1≈U1). В результате получим другое выражение для электромагнитного момента, которое удобно использовать при анализе работы машины, при построении ее характеристик

Из полученного выражения для электромагнитного момента следует, что он сильно зависит от подведенного напряжения (М). При снижении, например, напряжения на 10%, электромагнитный момент снизится на 19% (М. Это является одним из недостатков асинхронных двигателей, так как приводит на производстве к снижению производительности труда и увеличению брака.
Зависимость электромагнитного момента от скольжения
Выражение для электромагнитного момента (*) справедливо для любого режима работы и может быть использовано для построения зависимости момента от скольжения при изменении последнего от +∞ до -∞ (рис. 2.14).

Рассмотрим часть этой характеристики, соответствующая режиму двигателя, т.е. при скольжении, изменяющемся от 1 до 0. Обозначим момент, развиваемый двигателем при пуске в ход (S=1) как Мпуск. Скольжение, при котором момент достигает наибольшего значения, называют критическим скольжением Sкр, а наибольшее значение момента – критическим моментом Мкр. Отношение критического момента к номинальному называют перегрузочной способностью двигателя
Мкр / Mн = λ = 2 ÷ 3.
Из анализа формулы (*) на максимум можно получить соотношения для Мкр и Sкр

Критический момент не зависит от активного сопротивления ротора, но зависит от подведенного напряжения. При уменьшении U1 снижается перегрузочная способность асинхронного двигателя.

Если в эту формулу подставить вместо М и S номинальные значения момента и скольжения (Мн и Sн), то можно получить соотношение для расчета критического скольжения.

Участок характеристики (рис. 2.14), на котором скольжение изменяется от 0 до Sкр, соответствует устойчивой работе двигателя. На этом участке располагается точка номинального режима (Мн, Sн). В пределах изменения скольжения от 0 до Sкр изменение нагрузки на валу двигателя будет приводить к изменению частоты вращения ротора, изменению скольжения и вращающего момента. С увеличением момента нагрузки на валу частота вращения ротора станет меньше, что приведет к увеличению скольжения и электромагнитного (вращающего) момента. Если момент нагрузки превысит критический момент, то двигатель остановится.
Участок характеристики, на котором скольжение изменяется от Sкр до 1, соответствует неустойчивой работе двигателя. Этот участок характеристики двигатель проходит при пуске в ход и при торможении.
1 Электротехника: Учебник для неэлектротехнических специальностей вузов/ Зейдель Х.Э., Коген-Далин В.В., Крымов В.В. и др.; Под ред. В.Г. Герасимова. – М.: Высш. шк., 1985. – 480 с., ил.
2 Данилов А.И., Иванов П.М. Общая электротехника с основами электроники: Учебное пособие для студентов неэлектротехнических специальностей средних специальных учебных заведений. – 4-е изд., стер. – М.: Высш. шк., 2000. – 752 с., ил.
3 Липатов Д.Н. Вопросы и задачи по электротехнике для программированного обучения: Учеб. пособие для студентов вузов. – 3-е изд., испр. и доп. – М.: Энергоатомизадт, 1984. – 360 с., ил.
5 Электротехника с основами электроники: Руководство к лабораторным работам на стендах ЭВ-4/ Составители: Н.П. Блинова, Г.И. Волович, Ю.А. Губочкин, Г.П. Дубовицкий, И.М. Коголь, В.П. Кормухов, Г. А Машихина, Л.В. Мурзина, Л.В. Розенфельд, А.Я. Эргард, В.Я. Яковлев; Под ред. В.П. Кормухова. – Челябинск: ЧГТУ, 1992. – 67 с., ил.
6 Электротехника, электроника, электрооборудование: Методические указания к выполнению лабораторных работ / Составители: Волков Ю.К., Дубовицкий Г.П., Клиначёв Н.В., Коголь И.М., Кормухов В.П. и д.р.; Под редакцией Губочкина Ю.А. – Челябинск: ЮУрГУ, 1999.
7 Титце У., Шенк К. Полупроводниковая схемотехника: Справочное руководство/ Пер. с нем. – М.: Мир, 1982.
8 Хоровиц П., Хилл У. Искусство схемотехники: В 3 т./ Пер. с англ. – М.: Мир, 1993
Читайте также:
- Реферат понятие и критерии невменяемости
- Химически опасные объекты саратовской области реферат
- Требования безопасности к техническому состоянию транспортных средств при эксплуатации реферат
- Роль массажа и самомассажа в укреплении здоровья реферат
- История развития зуботехнического материаловедения реферат