
История развития систем автоматического управления реферат
Обновлено: 02.07.2024
История развития человечества показывает, что распределение трудовых ресурсов всех стран по видам деятельности существенно зависит от уровня развития страны. На начальном этапе (низкий уровень), когда главной проблемой была проблема обеспечения населения продуктами питания, 70 – 90 % трудоспособных жителей страны занимались сельским хозяйством, 10 – 20 % - промышленным производством (ремесленники), а всего 2 – 5 % занимались управлением и информационным обслуживанием.
Механизация – это замена ручного труда в сфере материального производства (выработка, переработка вещества или энергии) работой машин и механизмов. Развитие механизации сельского хозяйства приводило, с одной стороны, к тому, что достаточное количество продуктов питания производило меньшее количество населения, а с другой – производство средств механизации труда требовало новых рабочих рук. Поэтому по мере роста уровня развития стран происходил переток трудовых ресурсов в промышленное производство.
В свою очередь, развитие промышленного производства, его механизация, появление паровых машин, усложнение организационной структуры предприятий приводило к усложнению задач управления и информационного обслуживания. Исторический опыт показывает, что чем выше уровень развития общества, тем больший удельный вес в общем объеме работ занимают работы, связанные с управлением и информационным обслуживанием.
На современном этапе обработка информации и управление становятся решающим фактором повышения уровня развития страны во всех остальных сферах, включая сельскохозяйственное и промышленное производство, транспорт, строительство, здравоохранение, образование, науку и, наконец, охрану общественного порядка и оборону страны. То есть обработка информации становится важнейшим элементом любой сферы человеческой деятельности. Не случайно появление термина информационные технологии – процесс получения и преобразования информации, вещества или энергии из начального состояния в заданное конечное с помощью методов, программных и аппаратных средств информатики.Информатика – наука о методах сбора, накопления, передачи и обработки информации с помощью ЭВМ.
Замена физического труда человека в процессе создания материальных благ работой машин и механизмов называют механизацией работ. Использование автоматических устройств (прежде всего, вычислительной техники) в процессах обработки информации называют автоматизацией. Ведущие по уровню экономического и научного развития страны мира сегодня переориентировались из сферы материального производства в сферу развития национальных информационных ресурсов. При этом основным объектом для инвестиций стали так называемые наукоемкие изделия, т.е. изделия, в стоимости которых более 5 % составляют расходы на научно-исследовательские и опытно-конструкторские работы (НИОКР). Так в производстве аппаратных и программных средств вычислительной техники доля НИОКР примерно в 3 раза выше, чем в металлообрабатывающей.
Наибольший эффект аппаратные и программные средства автоматизации приносят в составе автоматизированных систем. Автоматизированная система (АС) – это система, состоящая из персонала и комплекса автоматизации его деятельности, реализующая информационную технологию выполнения установленных функций. В зависимости от объекта автоматизации, а также от назначения и функций системы различают автоматизированные системы управления (АСУ), системы автоматизированного проектирования (САПР), автоматизированные информационные системы (АИС), автоматизированные системы контроля и учета (АСКУ), автоматизированные системы научных исследований (АСНИ) и т.п.
В свою очередь, в зависимости от объекта автоматизации, в категорию АСУ попадают и автоматизированные системы управления производством (АСУП) и автоматизированные системы управления технологическими процессами (АСУ ТП). АСУП предназначены для автоматизации задач управления организационно-экономического характера (планирование производства; учет материалов, продукции, энергии, финансов и кадров; снабжение сырьем, материалами и полуфабрикатами; сбыт продукции; управление транспортом и т.п.).
АСУ ТП – это АСУ, предназначенные для выработки и реализации управляющих воздействий на технологических объектах управления (ТОУ) с целью обеспечения наивысшего качества функционирования ТОУ. ТОУ – это совокупность технологического оборудования (электродвигатели, насосные агрегаты, вентиляторы, печи, горелки, котлы и т.п.) и реализованного на нем по соответствующим регламентам технологического процесса. Качество функционирования АСУ ТП оценивается критерием качества управления. Критерий качества управления – численный показатель (скалярный или векторный), характеризующий эффективность работы ТОУ, значение которого зависит от управляющих воздействий. В качестве критериев могут использоваться как технологические параметры (температура, давление, максимальное отклонение от заданного размера, содержание железа в концентрате), так и технико-экономические показатели (удельные затраты сырья и энергии, прибыль, производительность при выполнении требований по качеству и т.п.).
Не меньшую роль, чем критерий качества управления, в функционировании АСУ ТП играют ограничения, которые должны соблюдаться при выработке управляющих воздействий. Ограничения бывают двух видов: физические, которые не могут быть нарушены даже при неправильном выборе управляющих воздействий, и технологические, которые в принципе могут быть нарушены, но эти нарушения приводят к значительному ущербу. Примером физического ограничения является максимальный расход природного газа на горелку при полностью открытой заслонке. Примером технологических ограничений являются ограничения на уровень металла в кристаллизаторе машины непрерывного литья заготовок (МНЛЗ). Выход за ограничения может приводить к дефектам в непрерывно литой заготовке.
На современных предприятиях АСУП и АСУ ТП функционируют, как правило, в составе единой интегрированной по информации корпоративной АСУ, имеющей иерархическую структуру. На нижнем уровне управление осуществляется совокупностью взаимосвязанных АСУ ТП технологических агрегатов, участков и цехов, а на верхнем – АСУП. С верхнего уровня в АСУ ТП поступает плановая и директивная информация, в обратном направлении идет поток отчетных данных технико-экономического характера (количество израсходованного сырья и электроэнергии, объем и номенклатура произведенной продукции, время и причины простоев).
Дисциплина АТПиП направлена, в основном, на изучение АСУ ТП: их функций и перечня решаемых задач; состава и структуры; алгоритмов регулирования и управления, реализуемых в автоматическом режиме; современных тенденций развития рынка аппаратных и программных средств АСУ ТП.
Краткая история развития АСУ ТП
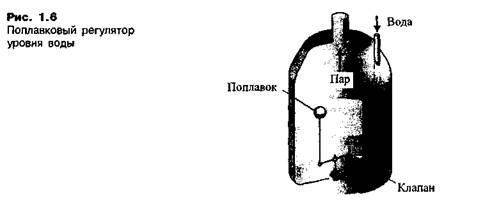
Первые автоматические устройства управления промышленного назначения появились в связи с изобретением и развитием паровых машин. Такими устройствами были поплавковый регулятор питания парового котла водой, разработанный российским механиком Н. И. Ползуновым в 1756 г., а также регулятор скорости паровой машины, созданный англичанином Д. Уаттом в 1784 г.. Длительное время регуляторы паровой машины были основными видами автоматических устройств управления в промышленности.
В тридцатые и сороковые годы ХХ столетия теория и практика автоматического регулирования получили бурное развитие, что во многом связано с индустриализацией и Второй мировой войной. В арсенале специалистов по управлению прочно закрепились принцип обратной связи, пропорционально-интегрально-дифференциальный (ПИД) регулятор, частотные методы анализа и синтеза систем. Помимо отдельных регуляторов в промышленности стали применяться локальные системы контроля, регулирования и управления (ЛСКРиУ). Так в конце 30-х годов наМагнитогорском и Кузнецком металлургических комбинатах были разработаны и внедрены системы регулирования теплового режима мартеновских печей. Типовая схема ЛСКРиУ приведена [4] на рисунке 1.

Рис. 1 Типовая схема ЛСКРиУ
ЛСКРиУ эффективны при автоматизации технологически независимых объектов с достаточно компактным расположением основного оборудования и несложными целями управления (стабилизация, программное управление) при хорошо отработанной технологии и стационарных условиях эксплуатации. Локальные регуляторы могут быть одно- и многоканальными. Наличие человека-оператора (лица, принимающего решение - ЛПР) в системе, территориальная компактность объекта позволяют использовать эту структуру на объектах с невысоким уровнем механизации и надежности технологического оборудования. ЛПР осуществляет общий контроль технологического процесса и, при необходимости, переходит на ручное управление. Устройство связи с оператором включает, как правило, измерительные приборы, устройства световой и звуковой сигнализации, регистрирующие приборы. Структура ЛСКРиУ соответствует классической структуре системы регулирования.
Увеличение числа контролируемых и регулируемых параметров, возрастание территориальной рассредоточенности ТОУ привели к появлению нового класса систем автоматизации технологических процессов – централизованных систем контроля, регулирования и управления (СЦКРиУ). Структура СЦКРиУ приведена [4] на рисунке 2.

Рис. 2 Типовая схема СЦКРиУ
Для СЦКРиУ помимо функций локального регулирования (ЛР), свойственных ЛСКРиУ, характерны также функции дистанционного управления (ДУ), логико-командного управления (ЛКУ). Появляется центральный пульт контроля и управления. На пульте расположены средства отображения информации, полученной от датчиков, и командной информации от задающих устройств (ЗУ). Двойные стрелки на схеме отражают векторный характер сигналов и связей. В СЦКРиУ довольно часто используются многоканальные приборы (многоканальные измерительные приборы и вторичные преобразователи, многоканальные регуляторы, регистраторы технологических параметров).
В СЦКРиУ оператор может быть территориально отделен от ТОУ, поэтому проблемам отображения информации о ходе технологического процесса в системе уделяется повышенное внимание (мнемосхемы, табло, регистраторы, световая и звуковая сигнализация).
АСУ ТП, в которых цифровая ЭВМ вырабатывает уставки для локальных регуляторов, называют системами с супервизорным управлением. Схема АСУ ТП с супервизорным управлением приведена на рисунке 3.


Рис. 3 Схема АСУ ТП с супервизорным управлением
Компьютерное управление – это область, в которой с самого начала существовало необычно конструктивное взаимодействие между теорией и практикой. Аппарат анализа и синтеза систем управления, разработанный ранее на основе непрерывного математического описания, не применим напрямую для проектирования цифровых систем, построенных на базе компьютера. Потребовалось создать специальный раздел в теории управления – дискретные системы управления. Особым катализатором, интенсифицирующим исследования в этой области, стали ракетно-космические программы СССР и США. Существенный вклад в создание теоретических основ компьютерных систем управления внесли российские ученые Цыпкин Я.З., Красовский А.А., Кузин Л.Г., Бесекерский В.А., Волгин Л.Н. и зарубежные Джури Э., Калман Р., Бьюси Р., Ито В., Ту Д., Куо Б., Острем К. и др.
Важный шаг в развитии АСУ ТП был сделан в 1962 году, когда английская компания ImperialChemicalIndustries представила концепцию прямого (непосредственного) цифрового управления (ПЦУ или НЦУ в русской технической литературе, DirectDigitalControl – DDC в англоязычной литературе). Идея состояла в том, что сигналы от датчиков вводились в ЭВМ, а управляющие сигналы, сформированные компьютером, возвращались обратно непосредственно на исполнительные устройства. Из процесса управления убирались аналоговые регуляторы. Схема АСУ ТП с ПЦУ приведена на рисунке 4.

Рис. 4 Схема АСУ ТП с ПЦУ
Дальнейший рост числа АСУ ТП с ПЦУ связан с переходом в шестидесятые годы на новую элементную базу ЭВМ. Вначале полупроводниковые транзисторы позволили на порядок снизить стоимость единицы вычислительной мощности компьютера и повысить его надежность, а затем интегральные микросхемы улучшили эти показатели еще на порядок. Главный недостаток систем с ПЦУ состоит в том, что отказ ЭВМ приводил к потере управления технологическим объектом. Поэтому при удешевлении ЭВМ появилась возможность существенно повысить работоспособность АСУ ТП за счет дублирования ЭВМ (одна в работе, вторая – в горячем резерве).
Однако, централизованная структура АСУ ТП, когда практически все логические и арифметические вычислительные операции выполняются одной ЭВМ, достаточно скоро исчерпала свои возможности. И, несмотря на бурный рост технических характеристик ЭВМ, централизованные АСУ ТП перестали удовлетворять возросшим требованиям практики автоматизации. На смену централизованным пришли децентрализованные распределенные системы управления (DistributedDirectDigitalControl – распределенное прямое цифровое управление). В децентрализованной распределенной системе существует несколько взаимосвязанных цифровых вычислительных средств (серверы, рабочие и инженерные станции, контроллеры, станции распределенного ввода/вывода, интеллектуальные датчики и исполнительные устройства, панели оператора и т.п.), по которым распределяются задачи АСУ ТП.
Главными предпосылками создания распределенных децентрализованных АСУ ТП стали создание локальных вычислительных сетей и разработка программируемого логического контроллера.
Первая в мире локальная вычислительная сеть ARPANET была построена в 1969 году агентством ARPA, работавшим над этой проблемой по заказу Министерства обороны США в течение 12 лет. В СССР первая локальная сеть ИАСНЕТ появилась в 1986 году.
Первый ПЛК был разработан в 1968 году группой инженеров компании GeneralMotors. В это время еще не были изобретены микропроцессоры (первый микропроцессор создан в 1971 году). ПЛК на основе микропроцессора был впервые создан в США в 1977 году компанией AllanBradleyCorporation на базе микропроцессора Intel 8080, с использованием дополнительных схем быстрого выполнения битовых логических операций.
Конструктивно современные ПЛК устроены так, что они хорошо приспособлены к работе в типовых промышленных условиях, с достаточно широким температурным режимом, повышенной влажностью и запыленностью, при наличии высокого уровня вибрации и электромагнитных излучений.
В распределенных АСУ ТП выход из строя какого-то из вычислительных средств или какой-то из линий связи может привести к потере только части функций системы. В особо ответственных системах уровень надежности может быть существенно повышен за счет резервирования. Распределенные АСУ ТП и в настоящее время являются наиболее современным, высоко эффективным средством автоматизации и управления технологическими процессами. Сейчас на рынке аппаратных и программных средств широко представлена продукция различных производителей. Среди наиболее крупных производителей комплексных средств автоматизации можно выделить фирмы Siemens, Honeywell, AllanBradley, ABB, SchneiderElectric, NationalInstruments, GE Fanuc, RockwellAutomation и др.
В истории развития САУ можно условно выделить четыре исторических периода:
• греческая и арабская цивилизации (III век до н. э.—1200 год н. э.);
• промышленная революция в Европе (с третьей четверти XVIII века, хотя корни ее прослеживаются и в начале XVII века);
• начало массовых коммуникаций (1910—1945);
• век освоения космоса, компьютерный век (с 1957 г. по наши дни).
Простейшие автоматические регуляторы и устройства применялись еще до новой эры. Известно, что системы регулирования с обратной связью применялись в III веке до нашей эры, например, для автоматического регулирования уровня воды в водяных часах с помощью поплавкового регулятора, чтобы повысить точность их показаний. Водяные часы представляют собой два резервуара. В первом резервуаре водяных часов уровень воды должен бытьпостоянным, постоянство его иподдерживает поплавковой регулятор.Этот постоянный уровень обеспечивает постоянство расхода водыво второй резервуар через трубу, расположенную в днище первогорезервуара. Уровень воды во втором резервуаре, таким образом,зависел от времени истечения воды из первого резервуара. Так былреализован принцип регулирования с обратной связью. Поплавковыерегуляторы использовались для регулирования уровня масла влампах для освещения, для дозированного разлива вина.
В средние века применялись центробежные регуляторы хода водяных мукомольных мельниц. В 1657 г. X. Гюйгенс предложил маятниковый регулятор хода для механических часов. В это же время были изобретены регуляторы температуры (для поддержания температуры при плавке металлов в печах; в инкубаторах для выведения цыплят — 1624 г.). В конце XVIII века в Америке регуляторы температуры применяются в химических печах, в производстве стали и фарфора.
Появление паровых машин приводит к изобретению регуляторов давления. В 1681г. изобретен первый предохранительный клапан для сброса давления пара. К первым промышленным регуляторам относят автоматический поплавковый регулятор уровня в паровом котле паровой машины, построенной в 1765 г. И.И. Ползуновым, и центробежный регулятор скорости для стабилизации угловой скорости вращения вала паровой машины, сконструированный Д. Уаттом (1788).
Вновь пробуждается интерес к регуляторам уровня. Слесарь Томас Креппер за изобретения сливных бачков с регуляторами уровня в 1775 г. возводится в рыцарское достоинство английской королевой Викторией.
Большой вклад в разработку и создание регуляторов для различных целей внесли русские ученые И.А. Вышнеградский, Н.Е. Жуковский, A.M. Ляпунов и др.
Исследования И.А. Вышнеградского и Д. К. Масквелла в области устойчивости и качества процессов регулирования положили начало развитию теории автоматического регулирования.
В 1932 г. американский ученый X. Найквист предложил для оценки устойчивости систем частотный критерий устойчивости. В 1940 г. X. Боде исследовал устойчивость замкнутых систем, используя такие понятия, как коэффициент усиления и запас устойчивости по фазе. Н. Минорский (1922), рассматривая нелинейные эффекты в замкнутых системах, впервые использует пропорционально-интегрально-дифференциальный регулятор. X. Хазен (1934) опубликовал теорию сервомеханизмов (исполнительных механизмов).
В конце 50-х—начале 60-х годов появляются работы Л.С. Понт-рягина, Р. Беллмана, Р. Калмана, которые заложили основы современной теории автоматического управления. Использование математических моделей не только на стадии проектирования, но и в процессе функционирования систем является одной из характерных черт современной теории автоматического управления. Важным разделом современной теории автоматического управления является оптимальное (и субоптимальное) оценивание параметров и характеристик по экспериментальным данным — идентификация.
Автоматическое регулирование и управление перестает быть скорее искусством и становится наукой с появлением электронной вычислительной техники.
Первая электронная вычислительная машина (ЭВМ) была создана в 1945 г. в США под руководством американских ученых Дж.В. Моучли и Д.П. Эккерта и предназначалась для расчета баллистических таблиц (машина была построена по заказу артиллерийского управления). ЭВМ содержала 18 тысяч электронных ламп и потребляла 150 кВт. Быстродействующая электронная счетная машина (БЭСМ) была сконструирована в начале 50-х годов прошлого века в СССР коллективом ученых, во главе которых стоял академик С.А. Лебедев.
В 1960 г. разработано второе поколение компьютеров с использованием полупроводниковой технологии. С 1965 г. начинает развиваться миникомпьютерная технология, а в 1969 г. В. Хофф изобрел микропроцессор. В 1970—1980-е годы получает развитие идея об использовании цифровых компьютеров для управления в промышленности, особенно химической. Основная мотивация такого подхода — развитие ядерной технологии. К 1983 г. появляются первые персональные компьютеры. Проектирование современных систем управления при наличии прикладных пакетов компьютерных программ, включая такие, как ORACLS, Program CC, Control-C, PC-Matlab, MATRIXX, Easy5, SIMNON и др., становится доступным для рядового инженера.
Американский ученый Норберт Винер (1894—1964) был одним из создателей кибернетики (от греч. kibernos — рулевой, кормчий) — науки об общих законах управления. Кибернетика стала теоретической базой создания и внедрения автоматизированных систем управления (АСУ).
В 21 веке мы не можем представить нашу жизнь без автоматизированных систем. А что было раньше? Ведь даже для управления хозяйством всегда были необходимы сбор информации, ее сохранение и обновление. В тридцатых и сороковых годах обработка собранной информации была прерогативой тех людей, которые вырабатывали и принимали управленческие решения. Эффективность управления в те времена определялась, главным образом, талантом и компетентностью руководителя, т.е. лица, принимающего решения. Но ведь как в настоящее время, так и тогда все уровни народного хозяйства нуждались в счете. Правительство понимало глобальность этой проблемы, и со временем стали появляться первые машиностроительные заводы, предполагаемые на создание электронно-вычислительных машин.
В нашей стране началом истории автоматизированных систем управления принято считать 60-е годы, когда во всех отраслевых промышленных народного хозяйства стали создаваться отделы по управлению развитием и внедрением вычислительной техники. Этот период характеризуется не полной автоматизацией экономического управления разных уровней, а лишь частичной. На самом деле историю АСУ надо начинать еще со времен до новой эры. Уже тогда активно использовались простейшие автоматические регуляторы и устройства. Именно это и стоит считать предпосылками для создания техники, которую мы используем в настоящее время.
- Мировое значение систем автоматического управления
Система автоматического управления поддерживает или улучшает функционирование управляемого объекта. САУ улучшает производительную, хозяйственную, экономическую, управленческую деятельности. Мы не можем представить свою повседневную жизнь без систем автоматического управления. САУ применяются в различных отраслях промышленности, энергетике, транспорте, медицине, этот список можно продолжать до бесконечности. С давних времен люди искали пути автоматизирования тех или иных процессов. В средние века применялись центробежные регуляторы хода водяных мукомольных мельниц. После появления в XVII веке паровых машин начинается изобретение регуляторов давления. В конце XVIII века в Америке регуляторы температуры применяются в химических печах, в производстве стали и фарфора. Все это используется и в настоящее время, только в более усовершенствованном виде.
Использование обратной связи для целей управления имеет увлекательную историю. Впервые принцип обратной связи был применен при создании поплавковых регуляторов в Греции за 300 лет до н. э. Такой регулятор был использован Ктесибиосом в водяных часах (см. задачу 1.11). В масляном фонаре, изобретенном Филоном приблизительно в 250 году н.э., поплавковый регулятор позволял поддерживать постоянный уровень масла, игравшего роль горючего. Херон из Александрии, живший в первом столетии н. э., написал книгу под названием Пневматика, в которой привел несколько чертежей поплавковых регуляторов уровня воды.
Первой системой с обратной связью, изобретенной в современной Европе, был регулятор температуры Корнелиуса Дреббеля (1572-1633) из Голландии. Дени Папен (1647-1712) в 1681 г. изобрел первый регулятор давления для паровых котлов, работавший по принципу предохранительного клапана.
Первым автоматическим регулятором промышленного назначения общепризнанно считается центробежный регулятор Джеймса Уатта, разработанный в 1769 г. для управления скоростью вращения вала паровой машины. С помощью этого полностью механического устройства, изображенного на рис 1.5, производилось измерение скорости вращения вала машины. При увеличении скорости металлические шарики за счет центробежной силы расходились, что, в свою очередь, приводило к перемещению втулки вверх по оси регулятора. Это перемещение с помощью рычажного механизма передавалось на кла-

пан, который уменьшал подачу пара в машину и, следовательно, скорость вращения вала. Для приведения регулятора в действие от машины отбиралась некоторая мощность, поэтому измерение скорости проводилось не точно.
В России первой в истории системой с обратной связью был поплавковый регулятор уровня воды в паровом котле, изобретенный И. Ползуновым в 1765 г. (рис. 1.6). С помощью поплавка измерялся уровень воды, а рычажный механизм воздействовал на клапан, регулировавший подачу воды в котел.
Период до 1868 г. характеризовался появлением систем автоматического управления, главным образом, благодаря интуиции и изобретательству. Попытки увеличить точность управления приводили к медленному затуханию колебаний во время переходных процессов и даже к потере системой устойчивости. Именно тогда и возникла необходимость разработки теории автоматического управления. Дж. Максвелл, используя дифференциальное уравнение как модель регулятора, заложил математические основы теории управления. Его работа была посвящена исследованию влияния изменения параметров системы на ее поведение. В те же годы И. А. Вышнеградский сформулировал математическую теорию регуляторов.
Перед Второй мировой войной развитие теории и практики управления в США и Западной Европе шло по несколько иному пути, нежели в России и Восточной Европе. В США в это время основные усилия были направлены на применение обратной связи в системах телефонии и электронных усилителях. Главные достижения здесь принадлежат Воде, Найквисту и Блэку, которые предложили описывать работу усилителей с обратной связью с помощью частотных характеристик. Напротив, в бывшем Советском Союзе известные математики и механики опережали западных ученых в области собственно теории управления, причем акцент делался на анализ систем во временной области с использованием дифференциальных уравнений.
Большой толчок развитию теории и практики автоматического управления дала Вторая мировая война, когда возникла потребность в создании автопилотов, систем орудийной наводки, станций радарного слежения и других устройств военного назначения, работающих на основе принципа обратной связи. Сложность систем военного назначения и ожидаемые выгоды от их применения побудили расширить круг технических средств и обострили интерес к системам управления и разработке новых методов их синтеза и анализа. До 1940 г. в большинстве случаев синтез систем управления проводился методом проб и ошибок и являлся своего рода искусством. В 40-е годы значительно выросло число аналитических методов синтеза, и теория управления по праву стала настоящей инженерной дисциплиной.
После Второй мировой войны в теории управления по-прежнему преобладали частотные методы, но наряду с этим возросла роль преобразования Лапласа и комплексной ^-плоскости. В 50-е годы акцент в теории управления был сделан на разработку методов, связанных с использованием j-плоскости, в частности, метода корневого годографа. В 80-е годы обычным делом стало применение цифровых компьютеров в системах управления. В настоящее время в США в системах прямого цифрового управления задействовано более 400000 компьютеров, благодаря чему появилась возможность одновременного измерения и управления многими переменными.
Запуск первого искусственного спутника Земли и начало космической эры дали новый толчок развитию техники управления. Возникла необходимость создания сложных, высокоточных систем управления для ракет и космических зондов, а возросшие требования к точности этих систем и желание минимизировать массу спутников обусловили повышенный интерес к теории оптимального управления. Именно поэтому в последние два десятилетия стали популярными методы анализа и синтеза во временной области, разработанные Ляпуновым, Минорским и другими учеными, в особенности Л. С. Понтряги-ным в СССР и Р. Беллманом в США. Теперь не вызывает сомнения, что при решении задач анализа и синтеза систем одновременно должны использоваться как частотные, так и временные методы.
Некоторые этапы истории автоматического управления отражены в табл. 1.1.
Таблица 1.1. Избранные этапы развития теории и систем автоматического управления
1.3. Два примера использования обратной связи
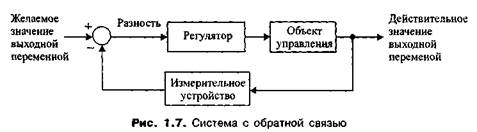
Принцип обратной связи используется для создания замкнутых систем управления, обладающих заданными характеристиками. Конфигурация системы с обратной связью представлена на рис. 1.7. Как ясно из рисунка, в системе вычисляется разность (иначе — ошибка) между желаемым значением выходной переменной и ее достаточно точно измеренным действительным значением. Приводимые ниже два примера показывают, как с помощью обратной связи можно улучшить свойства системы.
Было утро вторника 2 августа 1927 г., когда во время переправы на пароме через Гудзон по дороге на работу мне внезапно в голову пришла мысль об использовании в усилителе отрицательной обратной связи. Более 50 лет я размышлял, как и почему возникла эта идея, но даже и теперь я не могу сказать, как всё произошло. Я знаю только то, что после нескольких лет работы над проблемой я неожиданно понял, что если подать сигнал с выхода усилителя на его вход, причем в обратной фазе, и воспрепятствовать самовозбуждению усилителя (свисту, как мы позже назвали этот эффект), то я получу именно то, что хотел — способ устранения искажений выходного сигнала. Я раскрыл утреннюю газету Нью-Йорк Тайме и на полях набросал соответствующую схему, дополнив ее формулой для коэффициента усиления с учетом обратной связи. Я подписался под этой схемой, а 20 минут спустя, когда я прибыл в лабораторию на Уэст-стрит, 463, ее также заверил своей подписью ныне покойный Эрл К. Блессинг.
Я представил себе, что это решение может привести к разработке усилителей с высокой степенью линейности (при отрицательной обратной связи от 40 до 50 дБ), но оставался один важный вопрос: как я узнал, что смогу избежать самовозбуждения подобной схемы в широком частотном диапазоне, хотя многие вообще сомневались в ее устойчивости? Моя уверенность основывалась на работах, которые я проделал два года назад, занимаясь исследованием оригинальных осцилляторов, и три года назад, когда проектировал оконечные каскады и разрабатывал математические основы телефонной системы для междугородных переговоров.
В мыслях у Паркинсона было орудие, которое чувствовало бы приближение самолета и уничтожало его. Вот что описывает Паркинсон:
После трех или четырех выстрелов один из членов орудийного расчета улыбнулся и попросил меня подойти поближе. Когда я это сделал, он указал мне на левую цапфу орудийной турели, и я увидел, что там установлен такой же потенциометр, что и в моём самописце!
На следующее утро Паркинсон воплотил свои мечты в реальность:
Если мой потенциометр был способен управлять перемещением пера самописца, то нечто похожее могло бы, с соответствующими техническими изменениями, управлять наводкой зенитного орудия.
После напряженной работы в этом направлении вооруженным силам США 1 декабря 1941 г. была предложена инженерная модель соответствующего устройства. В начале 1943 г. было налажено промышленное производство подобных систем, и на вооружение было принято около 3000 систем орудийной наводки. На вход регулятора поступал сигнал от радиолокатора о текущем положении самолета, а в системе управления вычислялось его будущее положение.
Управление на практике
Современная теория управления имеет дело с системами, которые обладают качествами самоорганизации, приспосабливаемое™, робастности, обучаемости и оптимальности. Эти признаки постоянно поддерживают творческую инициативу инженеров, работающих в сфере автоматического управления.
Управление производственным процессом без непосредственного участия человека обычно называется автоматизацией.Среди прочих отраслей промышленности автоматизация преобладает в химической технологии, энергетике, в производстве стали, бумаги, автомобилей. Автоматизация играет ключевую роль в нашем индустриальном обществе. Различные автоматические устройства позволяют увеличить выпуск продукции в расчете на одного работающего, чтобы сбалансировать инфляционные издержки и рост заработной платы. Поэтому в промышленности используется термин производительность(в первую очередь — производительность труда), которая определяется как отношение выпуска продукции к реальным затратам в расчете на один час рабочего времени. Кроме того, промышленные предприятия стремятся постоянно улучшать потребительские качества выпускаемой продукции. За последнее десятилетие это наиболее заметно проявилось в автомобильной промышленности.
За сравнительно короткую историю Соединенных Штатов механизация и автоматизация резко изменили структуру рабочей силы, в результате страна из аграрной республики превратилась в мощную индустриальную державу. В 1820 г. более 70% рабочей силы было занято в сельском хозяйстве. К 1900 г. эта цифра составила уже менее 40%, а в настоящее время она меньше 5%.
В 1925 г. почти 558000 человек — около 1,3% всей рабочей силы страны — требовалось для добычи 520 млн т каменного и бурого угля, причем практически полностью из подземных разработок. К 1980 г. добыча угля выросла до 774 млн т, но количество рабочих при этом уменьшилось до 208000. Более того, только 136000 человек из общего количества было занято на подземных работах. Что же касается открытых разработок, то благодаря высокой степени механизации всего 72000 рабочих обеспечили добычу 482 млн т, или 62% от общего объема.
Процесс облегчения труда человека за счет технических достижений, начавшийся еще в доисторическую эпоху, вступает в новую фазу. Ускорение темпов технических нововведений, начавшееся с Промышленной Революции, до недавних пор сводилось главным образом к устранению физического труда из производственных процессов. В наши дни выдающиеся достижения в компьютерной технологии вызывают не менее важные социальные изменения: по способности собирать и обрабатывать информацию компьютеры всё больше приближаются к человеческому мозгу.
Автоматизация позволяет увеличить производительность и повысить качество выпускаемой продукции. Термин автоматизация впервые стал популярен в автомобильной промышленности. Полностью автоматизированные станки были связаны с помощью конвейера в длинную линию, способную производить детали двигателя, например, такие как блок цилиндров, без вмешательства оператора. При производстве кузовов высокоскоростные штамповочные прессы были связаны автоматическими подающими механизмами, что позволило повысить производительность формовки металлических листов. На многих других операциях, где процесс отличался достаточной стабильностью, например при изготовлении радиаторов, ручную работу заменили полностью автоматизированные линии.
В 90-е годы возникла потребность в производстве мелких партий заказных изделий, а это стимулировало создание гибких автоматизированных систем и промышленных роботов.
В США, Японии и Европе в сфере автоматического управления занято около 150000 инженеров. Только в США за счет автоматизации извлекается доход более 50 млрд. долларов в год! Теория и практика автоматического управления — это многогранная, увлекательная и чрезвычайно полезная инженерная дисциплина, и каждый может легко осознать необходимость ее изучения.
Примеры современных систем управления
Управление с использованием обратной связи—это неоспоримый факт нашей повседневной жизни. Управлять автомобилем очень приятно, когда машина мгновенно реагирует на действия водителя. Многие автомобили с этой целью оснащены гидроусилителями руля и тормозов. Простая блок-схема системы управления движением автомобиля изображена на рис. 1.8 (а). Желаемое направление движения сравнивается с результатом измерения действительного направления и в итоге образуется ошибка, как показано на рис. 1.8 (б). Информация о действительном направлении поставляется за счет визуальной и тактильной (телодвижение) обратной связи. Дополнительная обратная связь образуется ощущением рулевого колеса руками водителя (датчиком). Эта система с обратной связью является аналогом хорошо известных систем управления курсом океанского лайнера или большого пассажирского самолета. На рис. 1.8 (в) изображена типичная реакция автомобиля на действия водителя.
Системы управления функционируют по замкнутому циклу, как показано на рис. 1.9. Если датчик является точным, то измеренное значение выхода системы равно его действительному значению. Разность между желаемым и действительным значениями выходной переменной, т. е. ошибка, поступает на управляющее устройство (например, усилитель). С его выхода сигнал поступает на исполнительное устройство, которое воздействует на объект управления таким образом, чтобы уменьшить ошибку. Например, если корабль пытается отклониться от курса вправо, руль приводится в движение так, чтобы повернуть корабль влево. Система на рис. 1.9 — это система с отрицательной обратной связью, т. к. выходной сигнал вычитается из входного, а разность подается на вход усилителя.
Многие другие хорошо знакомые системы управления состоят из тех же основных элементов, которые показаны на рис. 1.9. Так, бытовой холодильник имеет устройство задания желаемой температуры, термометрический датчик, определяющий действительное значение температуры и величину ошибки, и компрессор, играющий роль усилителя мощности. Другими примерами могут служить духовой шкаф, электропечь, водяной нагреватель. В промышленности повсеместно используются системы управления скоро-
 |
 |
 |
стью, температурой, давлением, положением, толщиной, составом вещества, качество\ изделий.
На современном этапе автоматизацию можно определить как технологию, использу ющую запрограммированные команды, воздействующие на некоторый объект или про> цесс, и обратную связь, с помощью которой определяется, правильно ли исполнены эй команды. Автоматизация часто применяется к процессам, в управлении которыми ране
В послевоенные годы теория автоматического управления развивалась плодотворно, и упомянуть обо всех направлениях и авторах просто невозможно. Вот некоторые из них: теория автоматического регулирования по возмущению, теория компенсации возмущений и инвариантности разработаны в трудах Г. Щипанова, В. Кулебакина, Б. Петрова и др.; принципы экстремального управления и теория поиска экстремума… Читать ещё >
- история развития теории автоматического управления
Теория автоматического управления ( реферат , курсовая , диплом , контрольная )
Теория автоматического управления (ТАУ) — научная дисциплина, изучающая процессы автоматического управления объектами разной физической природы. При этом при помощи математических средств выявляются свойства систем автоматического управления и разрабатываются рекомендации по их проектированию.
Является составной частью технической кибернетики и предназначена для разработки общих принципов автоматического управления, а также методов анализа (исследования функционирования) и синтеза (выбора параметров) систем автоматического управления (САУ) техническими объектами.
Этапы исторического развития ТАУ
В XIII в. немецкий философ-схоласт и алхимик Альберт фон Больштадт построил робота для открывания и закрывания дверей.
На рубеже ХVIII и XIX вв., в эпоху промышленного переворота, начинается новый этап в развитии автоматики, связанный с ее внедрением в промышленность. Появились первые автоматические устройства, к которым относятся регулятор уровня Ползунова (1765 г.), регулятор скорости паровой машины Уатта (1784 г.), система программного управления ткацким станком Жаккара (1804 — 1808 гг.) и т. д. Этим было положено начало регуляторостроения.
Если первые регуляторы были связаны с паровой машиной, то со второй половины XIX в. существенную роль в регуляторостроении начинают играть потребности в электрическом освещении. Так, в 60-е годы в работах В. Чиколаева впервые был применен электрический двигатель, а в 1874 г. он предложил и осуществил метод регулирования, составляющий основу современной электромашинной автоматики.
Этот новый период развития автоматики — период регуляторостроения, длившийся свыше полутора столетий, сыграл огромную роль в технике. В это время еще медленно и смутно начинают формироваться важнейшие принципы автоматики: принцип регулирования по отклонению Ползунова-Уатта, развившийся в концепцию обратных связей; принцип регулирования по нагрузке, послуживший основой теории инвариантности, и др. Начиная с курса профессора Петербургского университета Д. Чижова в 1823 г., теория регуляторов входит составным элементом в курсы и монографии по механике и паровым машинам.
Достойным продолжателем дела И. Вышнеградского был словацкий инженер А. Стодола, работы которого посвящены исследованию устойчивости ряда схем регулирования, в частности, непрямого регулирования с жесткой обратной связью. В этот же период сформулированы алгебраические критерии устойчивости Рауса и Гурвица.
Бурный рост промышленности отражается и на развитии работ в области теории регулирования. В конце XIX в. и начале XX столетия создаются новые виды электромеханических регулирующих приборов такие, как программные регуляторы, следящие системы и схемы компаудирования. Так, в 1877 г. А. Давыдов разработал проект первой следящей системы, содержащей электрические элементы, предназначенной для автоматического придания орудию надлежащего угла возвышения в соответствии с изменением расстояния до цели, которая была продемонстрирована в 1881 г ("https://referat.bookap.info", 7).
К началу XX в. и в первом его десятилетии теория автоматического регулирования формируется как общая дисциплина с рядом прикладных разделов. Особенно четко мысль о теории регулирования как дисциплине общетехнического характера проводится в работах И. Вознесенского (1922 — 1949 гг.) — руководителя одной из крупных советских школ в этой области, который в 1934 г. впервые выдвинул принцип автономного регулирования. Большой его заслугой является разработка общего метода разбиения процесса регулирования с несколькими регулируемыми величинами на ряд автономных процессов.
В 40 — 50-е годы разрабатываются основы теории нелинейных систем, сложность которых состоит в отсутствии единого общего математического аппарата. Здесь следует отметить работы по устойчивости А. Лурье (1944 — 1951 гг.), А. Летова (1955 г.). Завершающим этапом этого направления считается разработка теории абсолютной устойчивости, выдвинутой А. Лурье и В. Постниковым (1944 г.), более детально сформулированной М. Айзерманом (1949, 1963 гг.) и доведенной до изящного решения румынским ученым В. Поповым (1959 г.).
Большое значение для качественного исследования нелинейных систем имеют методы фазовой плоскости и фазового пространства, основы которых заложены А. Андроновым и его школой в 1930 — 1940 гг.
Я. Цыпкиным разработаны основы теории релейных (1955 г.) и импульсных (60-е годы) систем с различными видами модуляции. Н. Крыловым и Н. Боголюбовым (1934 г.) разработан метод гармонического баланса для определения параметров автоколебаний и условий их возникновения.
В послевоенные годы теория автоматического управления развивалась плодотворно, и упомянуть обо всех направлениях и авторах просто невозможно. Вот некоторые из них: теория автоматического регулирования по возмущению, теория компенсации возмущений и инвариантности разработаны в трудах Г. Щипанова, В. Кулебакина, Б. Петрова и др.; принципы экстремального управления и теория поиска экстремума разработаны В. Казакевичем. А. Фельдбаумом, А. Красовским. В эти же годы создаются основы теории оптимального управления Л. Понтрягиным. А. Летовым, Н. Красовским и др.
В настоящее время значение теории автоматического управления переросло рамки только технических систем. Динамические управляемые процессы имеют место в живых организмах, экономических и организационных человеко-машинных системах, их влияние существенно и отказ от них приводит к крупным потерям.
Дальнейшее развитие и усложнение систем автоматически привело к созданию автоматизированных систем управления (АСУ) технологическими процессами (АСУТП), производством (АСУП) и отраслью (АСУО). По идеологии построения эти системы достаточно близки между собой, хотя функции и технические средства, на которых реализуются эти АСУ, характер решаемых задач существенно отличаются.
Читайте также: