
Цифровые фотограмметрические системы реферат
Обновлено: 05.07.2024
Существует достаточно много фотограмметрических систем, предназначенных для решения не топографических задач по наземным снимкам. На рис. 1 представлена классификация этих систем. Эта классификация достаточно условная, но она дает представление о многообразии существующих систем.
В зависимости от принципа, положенного в основу измерения координат точек снимков фотограмметрические системы можно разделить на две большие группы: системы основанные на монокулярных и стереоскопических измерениях координат точек снимков. Системы первой группы предназначены в основном для изучения объектов в отдельных точках маркированных на поверхности объекта или в точках, являющимися четкими контурами. Системы второй группы применяются для построения цифровой модели объекта на основе стереоизмерений (автоматизированных или интерактивных) в любых точках поверхности объекта.
В свою очередь фотограмметрические системы, основанные на монокулярных измерениях координат точек снимков можно также разделить на две группы. Это интерактивные и автоматические.
Интерактивные системы. В этих системах объект снимается, как правило, одной камерой с различных точек фотографирования. В результате получают серию конвергентных (в общем случае) снимков. Измерения координат точек снимков (опорных, связующих и определяемых) выполняют монокулярно в интерактивном режиме, при этом отождествление соответственных точек на снимках выполняется оператором. В результате фототриангуляции по способу связок определяют элементы внешнего ориентирования снимков и координаты всех точек сети. Если требуется выполнить измерение дополнительных точек объекта, то в этом случае их координаты получаются в результате решения прямой многократной фотограмметрической засечки, используя элементы внешнего ориентирования снимков, определенных в результате фототриангуляции. Примером такой системы может служить CDW фирмы Rollei (рис. 2).
Основным применением таких систем является архитектура и машиностроение для изучения статических объектов, так как съемка выполняется одной камерой с разных точек пространства, поэтому объект не может изменяться во времени.
Автоматические системы основаны на измерении маркированных точек, которые наносятся на исследуемый объект. При этом съемка объекта выполняется синхронно двумя или более камерами. Обработка снимков выполняется автоматически и заключается в идентификации соответственных точек на снимках, их измерении и выполнении фототриангуляции по способу связок. В результате фототриангуляции определяют координаты маркированных точек и элементы внешнего ориентирования снимков. Если используются неметрические камеры, то фототриангуляцию выполняют с самокалибровкой.
На рис. 3 и 4 показаны примеры маркированных точек, которые применяются в системе V-STARS фирмы Leica.
Для повышения надежности отождествления точек на перекрывающихся снимках некоторые системы используют маркированные точки с номерами в виде графических кодов. Каждый номер имеет свой индивидуальный графический образ. На рис. 5 приведен пример таких кодированных точек, разработанных фирмой Leica, а на рис. 6 – кодировка номеров точек предложенная ГОСНИИАС.
Соответствующие номера точек получают путем корреляции исходного изображения с эталонами графических образов номеров точек.


поверхность объекта. При каждом положении луча лазера выполняется съемка двумя или более камерами. В результате на каждом снимке получается изображение только одной точки объекта, координаты которой в системе координат снимков определяются автоматически по известным алгоритмам. Проблема идентификации соответственных точек на снимках в этом случае отпадает, так как на всех снимках имеется изображение только одной точки. Затем, по этим координатам и известным элементам внешнего ориентирования снимков решается прямая многократная засечка для определения координат точки объекта. Такую систему удобно применять для изучения гладких поверхностей, например, для исследования полотна дороги (рис. 7).
В случае применения проектора для задания на поверхности объекта сети маркированных точек, как это сделано в системе V-STARS фирмы Leica (рис. 8,9), на всех снимках одновременно изображаются все маркированные точки. В этом случае алгоритм получения координат точек объекта будет несколько другим. На первом этапе следует
выполнить автоматическое выделение всех точек на каждом снимке, затем определить соответствующие координаты этих точек в системе координат снимков. Теперь необходимо выполнить отождествление соответственных точек на снимках. Если съемка выполнялась тремя или более камерами (рис. 9) под разными углами, то отождествление можно осуществить достаточно просто, применяя теорию базисных линий (рис. 10).
Для каждой точки (Р) первого снимка определяется множество точек (Рi) второго снимка, расстояние которых от базисной линии точки первого снимка на втором не более некоторого порога (точки - кандидаты). После этого определяются точки пересечения базисных линий точки первого снимка и точек - кандидатов второго снимка на третьем снимке. Соответствующей точкой на третьем снимке считается точка, для которой расстояние от какой-либо точки пересечения базисных линий до нее минимально. В результате применения этого алгоритма находятся сразу все соответственные точки на трех снимках. Затем решается прямая многократная засечка для определения пространственных координат точки объекта. Аналогичным образом поступают со всеми точками.
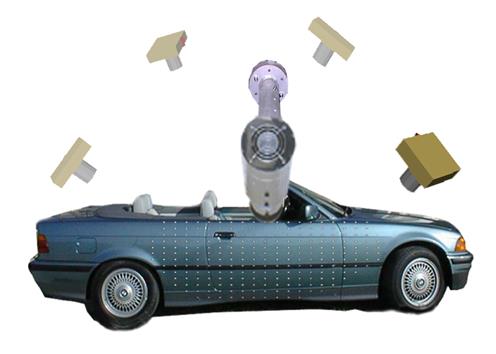
Для решения прямых засечек необходимы элементы внешнего ориентирования снимков. Для их определения выполняют фототриангуляцию по снимкам тест-объекта или по снимкам исследуемого объекта с нанесенными на него опорными точками с графическими кодами номеров этих точек. На рис. 11 и 12 приведен пример использования

системы V-STARS фирмы Leica для исследования кузова автомобиля, на который наносятся маркированные точки.
Система ProCam фирмы AICON (Германия) в качестве опорных точек использует пластины с нанесенной на них сетью точек с графическими кодами номеров (рис. 13). Эти пластины расставляются вокруг исследуемого объекта. Объект снимается на фоне этих пластин. Каждая пластина имеет свою систему координат, поэтому в процессе фототриангуляции определяются дополнительно по 6 элементов внешнего ориентирования каждой пластины относительно исходной. В качестве исходной может быть выбрана любая пластина.
Фотограмметрические системы, предназначенные для создания цифровых моделей поверхности объекта можно разделить на две большие группы (рис. 1). Это системы, основанные на обработке стереопары и системы, использующие специальную подсветку объекта структурированным освещением.
К фотограмметрическим системам первой группы можно отнести все системы, применяемые для обработки аэроснимков, такие как Фотомод, Талка, ЦФС, SOCET SET, ImageStation, VirtuoZO, OrthoBase и другие. Следует отметить, что эти системы применяются для обработки наземных снимков, полученных метрическими камерами. В этом случае обработка снимков ни чем не отличается от обработки аэроснимков. Некоторые из этих систем допускают применение не метрических камер, используя для этого проективные преобразования (Фотомод, SOCET SET и некоторые другие).
Системы этой группы применяются в основном для целей архитектуры, в горном деле и т.д. Если поверхность исследуемого объекта достаточно гладкая, то методы корреляции, используемые для построения цифровых моделей рельефа в этом случае не работают. Поэтому для таких объектов разработаны специальные системы, использующие подсветку структурированным освещением. На рис. 14 приведена пример стереопары объекта в структурированном свете в виде случайного поля яркости, а на рис. 15 – в виде щелей.
 |
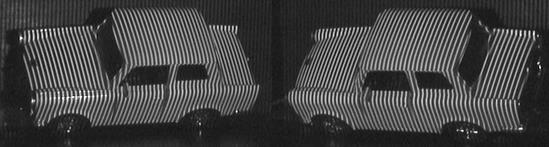 |
Если применяется подсветка в виде щели, то в этом случае объект можно снимать либо одной, либо двумя камерами. При применении одной камеры необходимо иметь калиброванный проектор, так как роль второй камеры выполняет сам проектор. Координаты точек объекта получаются как точки пересечения проектирующих лучей снимка и проектора.
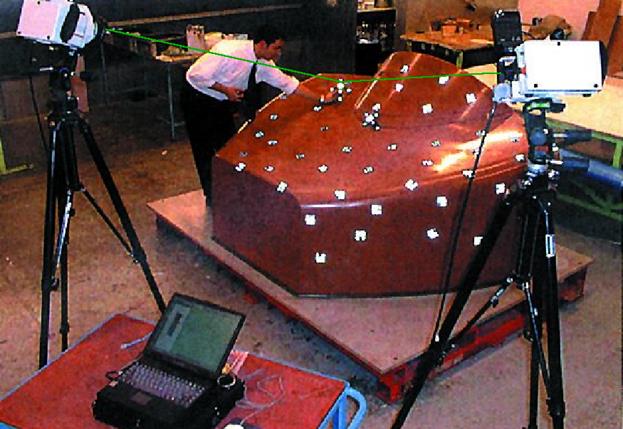
На рис. 16 и 17 приведены примеры системы InduScan, имеющей в своем составе две камеры (цифровые или фотокамеры UMK) и проектор случайного поля яркостей.
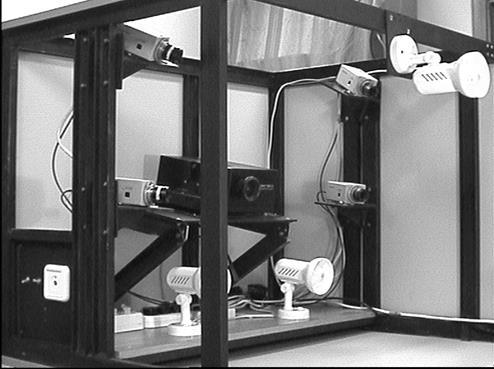
На рис. 18 и 19 показана фотограмметрическая система, разработанная ГОСНИИАС для построения цифровых моделей черепов. Эта система состоит из 4 видео камер и проектора для подсвета объекта структурированным освещением в виде щели.
 |
Существуют фотограмметрические системы, объединяющие в себе возможности всех перечисленных выше систем. Такие системы будем называть комбинированными. В них используются как маркированные точки, так и подсветка структурированным освещением. Примером таких систем может служить InduScan, GOM ATOS и некоторые другие.


Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем.

Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.).

Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам.

Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор.
Применение цифровых методов фотограмметрии в практике топографических, кадастровых и других съемок, как и картографического обеспечения геоинформационных и кадастровых систем, стало реальностью сегодняшнего дня. И нет никаких сомнений в том, что вытеснение классических аналоговых методов обработки материалов аэрофотосъемки - задача уже ближайшего будущего. Это обстоятельство и послужило основанием для того, чтобы в действующих инструкциях но фотограмметрическим работам были обозначены как основные задачи, решаемые цифровыми методами, так и критерии их эффективности.
Требования к цифровым фотограмметрическим системам (ЦФС) делятся на общие, технические и технологические.
Общие требования к ЦФС включают такие условия, как строгость алгоритма, максимальная автоматизация процессов обработки, гарантированное решение задачи при наличии теоретической возможности, использование всей геометрической точности исходных изображений, насыщенность алгоритмов логическими операциями контроля полноты и корректности данных, авторская поддержка программных средств и др.
Технические требования определяют главные условия функционирования цифровых систем и в частности - возможность обработки черно-белых и цветных снимков в сжатых и несжатых форматах, отсутствие ограничений на объем памяти и быстродействие ПЭВМ, реализация оптических и электронных средств стереоизмерении и ряд других.
Технологические требования к цифровым системам определяют перечень функциональных возможностей систем, наличие которых обеспечивает их эффективную эксплуатацию, в частности:
• автоматическое распознавание и измерение изображений координатных меток и выполнение внутреннего ориентирования;
• автоматическое стереоотождествление и измерение идентичных опорных и фотограмметрических точек перекрывающихся снимков;
• внутреннее, взаимное и внешнее ориентирование снимков и моделей (маршрутов) по произвольному числу исходных точек (меток, крестов);
• автоматическое построение по стереопарам цифровых моделей рельефа;
• ортотрансформирование изображений с использованием информации о рельефе, представленной в виде горизонталей, высот отдельных точек (пикетов) в виде регулярной или нерегулярной ЦМР, формирование выходного ортоизображения с заданным геометрическим разрешением и автоматическое выравнивание яркостей элементов изображения;
• сбор цифровой информации об объектах местности в процессе стерео- и моно векторизации (по эпиполярным снимкам и ор-тоизображению соответственно) с использованием настраиваемого классификатора, ее редактирование с помощью автоматизированных процедур и представление результатов в распространенных форматах.
В настоящее время имеется достаточно большое число цифровых фотограмметрических систем, из которых наибольшее распространение в специализированных предприятиях получили системы Photo-mod, Дельта, ТАЛКА и др. Рассмотрим технологические и эксплуатационные возможности некоторых из них.
Photomod - полнофункциональная система с богатейшими возможностями и оригинальным графическим интерфейсом. Используемые системой математические модели позволяют обрабатывать не только наземные и воздушные снимки, полученные по законам центрального проектирования, но и сканерные, радиолокационные изображения, а также снимки, полученные неметрическими камерами. Это одна из немногих фотограмметрических систем на рынке СНГ, позволяющая обрабатывать космические и иные цифровые сканерные изображения, полученные с помощью различных сенсоров.
К достоинствам системы относится замкнутый технологический цикл получения всех видов конечной продукции: ЦМР, ЗЭ-векторов, ортофотопланов и цифровых карт.
ЦФС Photomod имеет гибкую модульную структуру, обеспечи-шиощую оптимальное соответствие конфигурации задачам пользователя, функционирует в локальной сети и может эксплуатироваться со-нместно с другими фотограмметрическими системами. Структура системы и основные функции ее компонентов показаны на рис. 14.26.
Широкое распространение и профессиональное признание системы обеспечили ее богатейшие технологические возможности, основные из которых сводятся к следующему:
• оригинальная графическая среда и доступный интерфейс;
• возможность обработки сканерных спутниковых изображений, включая снимки SPOT, TERRA, EROS, LANDSAT, ICONOS, IRS, ASTER, QuickBird;
• возможность использования при построении и уравнивании фотограмметрических измерений полного набора систем координат, картографических проекций и данных GPS-измерений;
Аналоговые снимки
Сканерные снимки
Данные обАФА
Опорные точки
Результаты обработки

* ^ +
Photomod AT
ввод данных, выбор точек, измерения, контроль
Обычный сканер
т
| ScanCorrect |
I ■
| sIq| |
| Photomod Solver |
Уравненная сеть фототри-
________ ангуляции_________
В конце 20 века появление компьютеров с большими объёмами памяти и быстродействием, достижения в области компьютерной графики и цифровых методов записи изображений привели к созданию нового типа фотограмметрической техники - цифровой фотограмметрической системы(ЦФС), заменившей к началу 21 века оптико-механические и аналитические приборы.
- кадровые аналоговые снимки, полученные на фотоплёнке в фотокамере и переведённые в цифровую форму на фотограмметрическом сканере;
- кадровые цифровые снимки, полученные цифровой фотокамерой;
- цифровые сканерные изображения, полученные аэро или космической сканерной системой;
- радиолокационные изображения, полученные радиолокаторами бокового (РЛБО) и кругового обзоров (РЛКО).
В данном методическом пособии рассматривается фотограмметрическая обработка только первых двух видов снимков.
Первые ЦФС появились в 80-х гг. прошлого века с появлением достаточно производительных персональных компьютеров и пришли на смену аналитическим фотограмметрическим приборам. Главным фактором перехода к цифровым системам является возможность автоматизации широкого круга задач фотограмметрической обработки снимков, полученных различными съёмочными системами: оптическими, оптико-механическими, оптико-электронными.
Функциональные возможности ЦФС определяются развитием ее программной составляющей, которая для решения широкого круга задач фотограмметрической обработки аэрокосмической и наземной фотосъёмки должна обеспечивать выполнение следующих процессов: фототриангуляция для блока снимков, стереовекторизация контурной части карты и каркасов для 3D-моделей зданий и сооружений, создание оригинала рельефа и других форм цифровой модели рельефа, создание фотоплана, векторизация по фотопланам.
Основными тенденциями развития ЦФС являются: автоматизация процессов измерения в фототриангуляции, построения ЦМР и ортофотопланов, интеграция с ГИС, совершенствование программ трехмерного моделирования.
Фотограмметрия (от фото. др.-греч. γράμμα — запись, изображение и . метрия) — технология дистанционного зондирования Земли, позволяющая определять геометрические, количественные и другие свойства объектов на поверхности земли по фотографическим изображениям, получаемым с помощью летательных аппаратов любых видов. В настоящее время изображения для фотограмметрии получают как кадровыми, щелевыми и панорамными фотоаппаратами, так и с помощью радиолокационных, телевизионных, тепловых и лазерных систем.
Содержание
1 Фотограмметрия и области применение
2 История возникновение
3 Развитие фотограмметрий
Работа содержит 1 файл
Документ Microsoft Word (3).doc
Фотограмметрия (от фото. др .-греч. γράμμα — запись, изображение и . метрия) — технология дистанционного зондирования Земли, позволяющая определять геометрические, количественные и другие свойства объектов на поверхности земли по фотографическим изображениям, получаемым с помощью летательных аппаратов любых видов. В настоящее время изображения для фотограмметрии получают как кадровыми, щелевыми и панорамными фотоаппаратами, так и с помощью радиолокационных, телевизионных, тепловых и лазерных систем.
Фотограмметрия появилась в середине XIX века, практически одновременно с появлением самой фотографии. Применять фотографии для создания топографических карт впервые предложил французский геодезист Доминик Ф. Араго примерно в 1840 г.
В простейшем случае пространственные координаты то чек объекта определяются путём измерений, выполняемых по двум или более фотографиям, снятым из разных положений. При этом на каждом изображении отыскиваются общие точки. Затем луч зрения проводится от местоположения фотоаппарата до точки на объекте. Пересечение этих лучей и определяет расположение точки в пространстве. Более сложные алгоритмы могут использовать другую, известную заранее, информацию об объекте: например, симметрию составляющих его элементов, в определённых случаях позволяющую реконструировать пространственные координаты точек лишь по одному фотографическому изображению.
Алгоритмы, применяемые в фотограмметрии, имеют целью минимизировать сумму квадратов множества ошибок, решаемую обычно с помощью алгоритма Левенберга — Марквардта (или метода связок), основанного на решении нелинейных уравненийметодом наименьших квадратов.
Области применения фотограмметрии
Фотограмметрия находит применение в различных видах деятельности:
Общие принципы фотограмметрии
Фотограмметрия использует способы и приёмы различных дисциплин, в основном, заимствованные из оптики и проективной геометрии.
Типы данных при производстве фотограмметрических работ.
На схеме показаны четыре основных типа данных, которые могут быть как входными, так и выходными при производстве фотограмметрических работ:
- пространственные координаты определяют положение точек объекта в пространстве;
- координаты на фотографии определяют положения точек объекта на плёнке или цифровом снимке;
- элементы внешнего ориентирования фотоаппарата определяют его положение в пространстве и направление съёмки;
- элементы внутреннего ориентирования определяют геометрические характеристики процесса съёмки.
К элементам внешнего ориентирования относятся трёхмерные координаты центра проекции, продольный и поперечный углы наклона снимка и угол поворота. К элементам внутреннего ориентирования относятся, в первую очередь, фокусное расстояние объектива (хотя может учитываться и характер искажений, вносимых при съёмке: например, дисторсияобъектива, деформация фотоматериала и пр.) и двухмерные координаты главной точки.
Дополнительные наблюдения помогают точнее определять расстояния и координаты точек объекта, а также уточнять масштабы и саму систему координат.
Достоинства фотограмметрии
- Высокая точность измерений;
- Высокая степень автоматизации процесса измерений и связанная с этим объективность их результатов;
- Большая производительность (поскольку измеряются не сами объекты как таковые, а лишь их изображения);
- Возможность дистанционных измерений в условиях, когда пребывание на объекте небезопасно для человека.
История возникновения
Применять фотографии для создания топографических карт впервые предложил французский геодезист Доминик Ф. Арагопримерно в 1840 г., а в 1860 г. французский военный инженер Э. Лосседа выполнил фотографирование Парижа с крыши высокого здания и по фотоснимкам создал план, точность которого оказалась выше плана, полученного геодезическим методом. Этой работой было положено начало фотограмметрического метода съемки, который в последующие годы совершенствовался и стал применяться во многих странах.
В России первые фототопографические съемки были выполнены в 1891—1898 гг. инженерами Н. О. Виллером, Р. Ю. Тиле, П. И. Щуровым для целей трассирования железных дорог в Закавказье и Восточной Сибири.
Направления развития и применение
Фотограмметрия развивается по двум основным направлениям.
- Первое направление связано с созданием карт и планов по снимкам. Это направление часто называют фототопографией. Сюда же можно отнести составление карт поверхности внеземных объектов: Луны, Венеры, Марса.
- Второе направление связано с применением фотограмметрии для решения прикладных задач в различных областях науки и техники: в архитектуре, строительстве, медицине, криминалистике, автомобилестроении, робототехнике, военном деле, геологии и т. д. Это направление в фотограмметрии называют наземной или прикладной фотограмметрией.
Такое широкое применение фотограмметрии обусловлено следующими ее достоинствами:
- Высокая точность, потому что снимки объектов получают прецизионными камерами, а обработку снимков выполняют строгими методами.
- Высокая производительность, достигаемая благодаря тому, что измеряют не сами объекты, а их изображения. Это позволяет автоматизировать процессы измерений по снимкам и последующую обработку на компьютере.
- Объективность и достоверность информации, за счет того, что информация об объекте получается фотографическим путем.
- Возможность повторения измерений в случае получения спорных результатов.
- Возможность получения в короткий срок информации о состоянии, как всего объекта, так и отдельных его частей.
- Безопасность выполнения работ, так как измерения выполняются неконтактным методом. Это имеет особое значение, когда объект недоступен или пребывание в его зоне опасно для здоровья человека.
- Возможность изучения неподвижных, а также медленно и быстро движущихся объектов, скоротечных и медленно протекающих процессов.
Периоды развития
В истории развития фотограмметрии можно выделить три основных периода, которые можно условно назвать как аналоговая,аналитическая и цифровая фотограмметрия.
Аналоговая фотограмметрия берет свое начало с изобретения в 1901 г. К. Пульфрихом стереокомпаратора. Этот прибор позволяет измерять координаты точек снимков составляющих стереопару. Далее развитие фотограмметрии пошло по пути создания специальных оптических и механических приборов, предназначенных для непосредственного создания карт по аэро- и наземным снимкам. Эти приборы позволяют выполнить все процессы преобразования снимков в карту. Первый такой прибор, стереоавтограф, был разработан в 1909 г. (Е. Орель) для создания карт по наземным снимкам. В 1915 г. Газзер запотентовал стереопроектор, который стал прототипом мультиплекса, позволяющего построить стереоскопическую модель на экране по множеству снимков и измерять ее с целью создания карты. В 1932 г. Ф. В. Дробышев изобрел стереометр, позволяющий нарисовать рельеф местности непосредственно на снимках. Контурную часть карты получали по фотопланам, составленных по множеству трансформированных снимков. Трансформирование снимков выполняли на специальных приборах, называемых фототрансформаторами, которые позволяют преобразовать наклонный снимок в горизонтальный. В этот период было разработано достаточно много различных универсальных фотограмметрических приборов, как в России, так и за рубежом, которые используются в некоторых предприятиях и в настоящее время.
Аналитическая фотограмметрия. Этот этап в развитии фотограмметрии начинается с появлением ЭВМ (примерно в 1950 г.). Начиная с этого времени стали развиваться аналитические методы фотограмметрической обработки снимков, которые продолжают совершенствоваться и по настоящее время. В 1957 г. У. В. Хелава (Канада) разработал первый аналитический универсальный прибор, представляющий собой сочетание стерекомпаратора и электронной вычислительной машины. На стереокомпараторе выполнялись измерения координат точек снимков, а на ЭВМ — все преобразования этих измерений в проекцию карты. По сравнению с аналоговыми приборами аналитические позволяют значительно повысить точность обработки снимков и производительность. Таких приборов и систем было разработано достаточно много (Швейцария, Германия, Франция, Италия, Россия и Украина). В настоящее время они не выпускаются, но используются на производстве.
Цифровая фотограмметрия начала развиваться с появлением цифровых изображений. В начале 90-х годов прошлого столетия появились первые коммерческие цифровые фотограмметрические системы, позволяющие решать все фотограмметрические задачи на компьютере, включая стереоскопическое наблюдение и измерение снимков на экране компьютера. Отличительной особенностью цифровых фотограмметрических систем является возможность широкой автоматизации всех процессов преобразования снимков в карту. Это направление в развитии фотограмметрии в настоящее время является основным и уже широко применяется на производстве.
Читайте также: