
Что изучает техническая механика реферат
Обновлено: 04.07.2024
Техническая механика – наука о механическом движении и взаимодействии материальных тел.
Достижения ученых в области механики дают возможность решать сложные практические проблемы в области техники и по существу ни одно явление природы не может быть понято без уяснения его с механической стороны. И ни одно творение техники нельзя создать, не принимая в расчет те или иные механические закономерности.
Механическое движение – это изменение с течением времени взаимного положения в пространстве материальных тел или взаимного положения частей данного тела.
Механическое взаимодействие – это действия материальных тел друг на друга, в результате которых происходит изменение движения этих тел или изменение их формы (деформация).
Материальная точка – это тело, размерами которого в данных условиях можно пренебречь. Она обладает массой и способностью взаимодействовать с другими телами.
Механическая система – это совокупность материальных точек, положение и движение каждой из которых зависят от положения и движения других точек системы.
Абсолютно твердое тело (АТТ) – это тело, расстояние между любыми двумя точками которого всегда остается неизменным.
- Теоретическая механика и ее разделы. Задачи теоретической механики.
Теоретическая механика – это раздел механики, в котором изучаются законы движения тел и общие свойства этих движений.
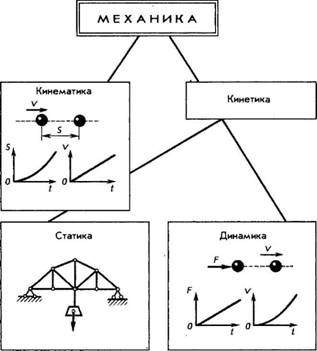
Теоретическая механика состоит из трех разделов: статики, кинематики и динамики.
Статика рассматривает равновесие тел и их систем под действием сил.
Кинематика рассматривает общие геометрические свойства движения тел.
Динамика изучает движение тел под действием сил.
1. Преобразование систем сил, действующих на АТТ в системы им эквивалентные, т.е. приведение данной системы сил к простейшему виду.
2. Определение условий равновесия системы сил, действующих на АТТ.
Для решения этих задач используется два метода графический и аналитический.
- Равновесие. Сила, система сил. Равнодействующая сила, сосредоточенная сила и распределенные силы.
Равновесие – это состояние покоя тела по отношению к другим телам.
Сила – это основная мера механического взаимодействия материальных тел. Является векторной величиной, т.е. Сила характеризуется тремя элементами:
- линией действия (направлением);
- модулем (числовым значением).
Система сил – это совокупность всех сил действующих на рассматриваемое абсолютно твердое тело (АТТ)
Система сил называется сходящейся, если линии действия всех сил пересекаются в одной точке.
Система называется плоской, если линии действия всех сил лежат в одной плоскости, в противном случае пространственной.
Система сил называется параллельной, если линии действия всех сил параллельны друг другу.
Две системы сил называются эквивалентными, если одну систему сил действующих на абсолютно твердое тело можно заменить другой системой сил, не изменяя при этом состояния покоя или движения тела.
Уравновешенной или эквивалентной нулю называется система сил, под действием которой свободное АТТ может находится в покое.
Равнодействующей силой называется сила, действие которой на тело или материальную точку эквивалентно действию системы сил на это же тело.
Внешними силами называются силы, с которыми части данного тела действуют друг на друга.
Сила, проложенная к телу в какой-либо одной его точке называется сосредоточенной.
Силы, действующие на все точки некоторого объема или поверхности называются распределенными.
Тело, которому никакие другие тела не препятствуют перемещению в любом направлении называется свободным.
- Внешние и внутренние силы. Свободное и несвободное тело. Принцип освобождаемости от связей.
Внешними силами называются силы, с которыми части данного тела действуют друг на друга.
При решении большинства задач статики требуется несвободное тело представить как свободное, что осуществляется с помощью принципа освобождаем о с т и, который формулируется так:
всякое несвободное тело можно рассматривать как свободное, если отбросить связи, заменив их реакциями.
В результате применения этого принципа получается тело, свободное от связей и находящееся под действием некоторой системы активных и реактивных сил.
Условия, при которых тело может находиться в равновесии,выводятся из нескольких основных положений, принимаемых без доказательств, но подтвержденных опытами,и называемых аксиомами статики. Основные аксиомы статики сформулированы английским ученым Ньютоном (1642—1727), и поэтому они названы его именем.
Аксиома I (аксиома инерции или первый закон Ньютона).
Всякое тело сохраняет свое состояние покоя или прямолинейного равномерного движения, пока какие-нибудь Силыне выведут его из этого состояния.
Способность тела сохранять свое состояние покоя или прямолинейного равномерного движения называется инерцией. На основании этой аксиомы состоянием равновесия считаем такое состояние, когда тело находится в покое или движется прямолинейно и равномерно (т. е. ПО инерции).
Аксиома II (аксиома взаимодействия или третий закон Ньютона).
Если одно тело действует на второе с некоторой силой, то второе тело одновременно действует на первое с силой, равной по модулю, ко противоположной по направлению.
Совокупность сил, приложенных к данному телу (или системе тел), называется системой сил. Сила действия какого-либо тела на данное тело и сила противодействия данного тела не представляют собой систему сил, так как они приложены к различным телам.
Если какая-нибудь система сил обладает таким свойством, что после приложения к свободному телу она не изменяет его состояние равновесия, то такая система сил называется уравновешенной.
Аксиома III (условие равновесия двух сил).
Для равновесия свободного твердого тела, находящегося под действием двух сил, необходимо и достаточно, чтобы эти силы были равны по модулю и действовали по одной прямой в противоположные стороны.
Условие, сформулированное в этой аксиоме, является необходимым для равновесия двух сил. Это значит, что если система двух сил находится в равновесии, то эти силы должны быть равны по модулю и действовать по одной прямой в противоположные стороны.
Условие, сформулированное в этой аксиоме, является достаточным для равновесия двух сил. Это значит, что справедлива обратная формулировка аксиомы, а именно: если две силы равны по модулю и действуют по одной прямой в противоположные стороны, то такая система сил обязательно находится в равновесии.
В дальнейшем мы познакомимся с условием равновесия, которое будет необходимо, но не достаточно для равновесия.
Аксиома IV.
Равновесие твердого тела не нарушится, если к нему приложить или удалить систему уравновешенных сил.
Следствие из аксиом IIIи IV.
Равновесие твердого тела не нарушится от перенесения силы вдоль линии ее действия.
Аксиома параллелограмма. Эта аксиома формулируется так:
Равнодействующая двух сил, приложенных к телу в одной точке, равна по модулю и совпадает по направлению с диагональю параллелограмма, построенного на данных силах, и приложена в той же точке.

Связями называются тела, ограничивающие перемещение данного тела в пространстве. Сила, с которой тело действует на связь, называется давлением; сила, с которой связь действует на тело, называется реакцией. Согласно аксиоме взаимодействия реакция и давление по модулю равныи действуют по одной прямой в противоположные стороны. Реакция и давление приложены к различным телам. Внешние силы, действующие на тело, делятся на активные и реактивные. Активные силы стремятся перемещать тело, к которому они приложены, а реактивные силыпосредством связей препятствуют этому перемещению. Принципиальное отличие активных сил от реактивных заключается в том, что величина реактивных сил, вообще говоря, зависит от величины активных сил, но не наоборот. Активные силы часто называют нагрузками.
Направление реакций определяется тем, в каком направлении данная связь препятствует, перемещению тела. Правило для определения направления реакций можно сформулировать так:
направление реакции связи противоположно направлению перемещения, уничтожаемого данной связью.
Если связи считать идеально гладкими, то во многих случаях можно сразу указать направление их реакций. Рассмотрим направление реакций основных видов связей, встречающихся в различных конструкциях.
1. Идеально гладкая плоскость

В этом случае реакция R направлена перпендикулярно опорной плоскости в сторону тела.
2. Идеально гладкая поверхность (рис. 16).

В этом случае реакция R направлена перпендикулярно к касательной плоскости t — t, т. е. по нормали к опорной поверхности в сторону тела.
3. Закрепленная точка или ребро угла (рис. 17, ребро В).
В этом случае реакция Rв направлена по нормали к поверхности идеально-гладкого тела в сторону тела.
4. Гибкая связь (рис. 17).
Реакция Т гибкой связи направлена вдоль с в я з и. Из рис. 17 видно, что гибкая связь, перекинутая через блок, изменяет направление передаваемого усилия.
5. Идеально гладкий цилиндрический шарнир (рис. 17, шарнир А; рис. 18, подшипник D).
В этом случае заранее известно только, что реакция R проходит через ось шарнира и перпендикулярна к этой оси.
6. Идеально гладкий подпятник (рис. 18, подпятник А).
Подпятник можно рассматривать как сочетание цилиндрического шарнира и опорной плоскости. Поэтому будем
считать реакцию подпятника состоящей из двух составляющих RA и YA. Полная реакция R подпятника будет равна векторной сумме этих составляющих.
7. Идеально гладкий шаровой шарнир (рис. 19).
В этом случае заранее известно только, что реакция R проходит через центр шарнира.
8. Стержень, закрепленный двумя концами в идеально гладких шарнирах и нагруженный только по концам (рис. 18, стержень ВС).
В этом случае реакция стержня направлена вдоль стержня, так как, согласно аксиоме III, реакции шарниров В и С при равновесии стержня могут быть направлены только по линии ВС, т. е. вдоль стержня.
- Система сходящихся сил. Сложение сил, приложенных в одной точке.
Сходящимисяназывают силы, линии действия которых пересекаются в одной точке.
В настоящей главе рассматриваются системы сходящихся сил, линии действия которых лежат в одной плоскости (плоские системы).
Представим, что на тело действует плоская система пяти сил, линии действия которых пересекаются в точке О (рис. 10, а). В § 2 было установлено, что сила—скользящий вектор. Поэтому все силы можно из точек их приложения перенести точку О пересечения линий их действия (рис. 10, б).

Таким образом, любую систему сходящихся сил, приложенных к различным точкам тела, можно заменить эквивалентной системой сил, приложенных к одной точке. Такую систему сил часто называют пучком сил.
Home Машиностроение Техническая механика Общие сведения
Общие сведения
Достижения технической механики позволяют не только улучшать конструкции машин и механизмов, но и совершенствовать производственные процессы. Сегодня на многих предприятиях широко используются машины-автоматы, автоматические поточные линии, которые без прямого участия человека обеспечивают выпуск готовой продукции, начиная с обработки сырья и кончая упаковкой готовых изделий.
Область применения законов механики для решения конкретных технических задач очень обширна. Наша эпоха научно-технического прогресса с особенной силой подтверждает необозримость практического приложения этой науки.
Техническая механика — это наука об общих законах механического движения и применения их в современной технике.
Техническая механика состоит из двух частей: теоретической и прикладной. Первая часть посвящена изучению теоретических основ механического движения, вторая — использованию положений теоретической механики для практических целей: проектирования механизмов, расчета деталей машин, строительных конструкций и сооружений.
Теоретическую механику принято подразделять на три тесно связанных раздела: статику, кинематику и динамику (рис. 1). В задачи теоретической механики входит определение условий, при которых соблюдаются условия равновесия тел. Этот раздел механики называют статикой. Изучением движения тел на основании законов геометрии занимается раздел механики, называемый кинематикой. Раздел механики, в котором изучается движение тел и рассматриваются причины, его вызвавшие, называют динамикой. Статика, кинематика и динамика охватывают все вопросы, связанные с механическим движением тел, и позволяют решать многочисленные практические задачи.
Прикладная механика также состоит из трех крупных разделов: теории механизмов и машин, сопротивления материалов, деталей машин.
Последовательное изучение всех этих разделов и является предметом технической механики.

Техническая механика (сокр. — техмех) — часть общей механики, изучающая механическое движение и различные виды взаимодействия материальных тел.
Курс технической механики состоит из разделов:
Для изучения данного курса и успешной сдачи экзаменов на нашем сайте Вы можете:
Содержание разделов технической механики
Лекции по технической механике не вошедшие в данный список можно найти, пройдя по ссылке на соответствующий раздел или воспользовавшись поиском по сайту.
Теоретическая механика
Кинематика
-
, координатный и естественныйспособы задания закона движения точки
- Определение скоростей и ускорений при векторном, координатном и естественном способах задания движения точки
- Простейшие движения абсолютно твердого тела вокруг неподвижной оси твердого тела
- Общий случай движения свободного твердого тела
- Сложное движение твердого тела
Статика
Динамика
- Законы механики Галилея-Ньютона
- Динамика относительного движения материальной точки . Масса и геометрия масс системы
- Момент количества движения материальной точки относительно центра и оси материальной точки и механической системы . Работа сил, приложенных к твердому телу
- Общие теоремы динамики и механической системы
- Определение динамических реакций подшипников при вращении твердого тела вокруг неподвижной оси . Идеальные связи , обобщенные силы
Сопротивление материалов
Теория механизмов и машин
-
и их классификация и их классификация
- Классификация плоских механизмов с кинематическими парами V класса с кинематическими парами V класса и точек звеньев II класса 1 вида
- Динамический анализ механизмов. Классификация сил, действующих в механизме
- Силовой (кинетостатический) расчет групп Ассура
Детали машин
Задания, выдаваемые для самостоятельной работы, способствуют развитию умения пользоваться типовыми методами расчета и проектирования машин.
- грамотно применять общие методы исследования и проектирования комплексной механизации и технологических комплексов;
- по специальной литературе и учебникам выработать навыки, необходимые для постановки технических задач, разработки технических заданий и общения со специалистами смежных специальностей;
- ознакомиться с историей развития механики и основных ее открытий;
- овладеть основами естественнонаучного мировоззрения и основными законами природы и механики.
Место техмеха в структуре ООП ВПО
— это отрасль физики, наука, изучающая движение материальных тел и взаимодействие между ними; в этом случае движение в механике описывается как временное изменение взаимного положения тел или их частей в пространстве.
Тематическая механика и ее разделы
Что касается предмета механики, то уместно сослаться на слова авторитетного ученого-механика Х.М. Тарга во введении к 4-му изданию его широко известного учебника теоретической механики: «Наука, посвященная решению любой проблемы, связанной с изучением движения или равновесия того или иного материального тела, а значит, и взаимодействий между телами, называется механикой в широком смысле этого слова. Теоретическая механика сама по себе является частью механики, в которой изучаются общие законы движения и взаимодействия материальных тел, т.е. те законы, которые применимы, например, как к движению Земли вокруг Солнца, так и к полету ракеты или артиллерийского снаряда и т.д. Другая часть механики состоит из различных общих и специальных технических дисциплин, посвященных проектированию и расчету всех видов конкретных конструкций, двигателей, механизмов и машин или их частей (частей).
Таким образом, предметная механика делится на:
- теоретическая механика;
- механика твёрдых сред;
Специальные механические дисциплины: теория механизмов и машин, сопротивление материалов, гидравлика, механика грунтов и др.
Простейшие движения абсолютно твердых тел (поступательное, вращательное, .
. сгорания. 2. Вращательное движение Другим простейшим видом механического движения является вращательное движение абсолютно твердого тела. При таком движении его точки описывают окружности, расположенные в параллельных плоскостях. . радиуса вектора r, соединяющего тело или материальную точку с осью вращения. Угловое перемещение измеряется в радианах. Угловая скорость - векторная физическая .
Теоретическая механика (в употреблении — теорема) — наука об общих законах механического движения и взаимодействия материальных тел.
Механика твёрдых сред — раздел механики, физики твёрдых сред и физики конденсированного состояния, посвящённый движению газообразных, жидких и деформирующихся твёрдых тел и силовым взаимодействиям в таких телах.
Другая важная особенность, используемая при разделении механики на отдельные секции, основана на тех представлениях о свойствах пространства, времени и материи, которые лежат в основе той или иной конкретной механической теории.
Данному атрибуту в границах механики присваиваются такие участки:
- классическая механика;
- релятивистская механика;
- Квантовая механика.
Классическая механика, Релятивистская механика, Квантовая механика
Механика занимается исследованием так называемых механических систем.
У механической системы есть определенное число k! Его состояние описывается с помощью обобщенных координат q_1,\points q_k,! и соответствующих обобщенных импульсов p_1,\points p_k,! Задача механики — исследовать свойства механических систем и особенно узнать их временную эволюцию.
Как один из классов физических систем, механические системы делятся на изолированные (замкнутые), замкнутые и открытые по способу взаимодействия с окружающей средой и по принципу изменения свойств с течением времени — на статические и динамические.
Основные механические системы:
- точка массы
- негосударственная система
- гармонический генератор
- Маятник математики
- физический маятник
- Крутильный маятник
- Твердое государство
- деформируемое тело
- полностью эластичное тело
- твёрдой окружающей среды.
Нетехническая система, Гармонический осциллятор (в классической механике), Твердая среда
Критические механические дисциплины
Кинематика (по-гречески: κινειν — двигаться) в физике
Dynamics (Greek δύναμις — force) — раздел механики, исследующий причины механических движений. Динамика работает с такими терминами, как масса, сила, импульс, импульс- момент, энергия.
Кроме того, механика включает в себя следующие механические дисциплины (содержание которых в значительной степени пересекается):
- Теоретическая механика
- Небесная механика
- Нелинейная динамика
- Механика без углекислого газа
- теория гироскопов
- Теория вибраций
- Теория устойчивости и катастрофы
- Механика твердого тела
- Гидростатика
- Гидродинамика
- Аэромеханика
- Газовая динамика
- Теория упругости
- теория пластичности
- Генетическая механика
- Механика разрушения
- Механика композитных материалов
- Реология
- статистическая механика
- Механика расчёта
- Специальные механические дисциплины
- теория механизмов и машин
- Предел прочности материалов
- Структурная механика
- Гидравлика
- Механика грунта.
Некоторые курсы механики ограничиваются только твердыми телами. Изучение деформируемых тел основано на теории упругости (сопротивление материала — его первое приближение) и теории пластичности. В случае жидкостей и газов, а не жестких тел, необходимо прибегнуть к механике жидкостей и газов, основными участками которой являются гидростатика и гидрогазодинамика. Общей теорией, изучающей движение и равновесие жидкостей, газов и деформированных тел, является механика твердых сред.
Предмет механики и её разделы
. Гамильтона -- Якоби. Следует отметить, что все формулировки классической механики, основанные на голономных вариационных принципах, являются менее общими, чем формулировка механики, основанная на уравнениях движения. Не все механические системы .
Основной математический аппарат классической механики: Дифференциальное и интегральное исчисление, специально разработанное для этой цели Ньютоном и Лейбницом. Современный математический аппарат классической механики включает в себя, главным образом, теорию дифференциальных уравнений, дифференциальную геометрию (симплектическую геометрию, контактную геометрию, тензорный анализ, векторное расслоение, теорию дифференциальных форм), функциональный анализ и теорию операционной алгебры, теорию катастроф и бифуркаций. Другие разделы математики также используются в современной классической механике. В классической формулировке механика основывается на трех ньютоновских законах. Решение многих задач механики упрощается, если уравнение движения позволяет сформулировать законы сохранения (импульс, энергия, импульс и другие динамические переменные).
Различные формулировки механики
Все три ньютоновских закона для широкого спектра механических систем (консервативные системы, лагранжевые системы, гамильтонские системы) связаны с различными принципами вариации. В этой формулировке классическая механика таких систем основана на принципе стационарности действия: системы движутся таким образом, что гарантируется стационарность функции действия. Эта формулировка используется, например, в механике Лагранжа и Гамильтона. Уравнения движения в лагранжевой механике являются уравнениями Эйлера-Лагранжа, а в гамильтонской механике — гамильтонскими уравнениями.
Независимыми переменными, которые описывают состояние системы, являются, в гамильтоновской механике — обобщенные координаты и импульс, а в лагранжевой механике — обобщенные координаты и их временные производные.
Гамильтоновская механика — одна из формулировок классической механики.
Биофиз.РЕМИЗОВ. Механика. Акустика глава 4 Некоторые вопросы биомеханики
. ных точек x v у 1 и х 2 , у 2 . Затем составляют систему двух уравнений: b: b = . рессии). Коэффициент корреляции определяет не только степень, но и направление взаимосвязи между величинами. Если отсутствие функциональной зависимости . положительном коэффициенте корреляции с увеличением одного значения увеличивается и другое. Если коэффициент корреляции отрицательный, увеличение одного параметра .
Если использовать функциональность действия, определенную на реальной траектории системы, связывающей определенную начальную точку с произвольной конечной точкой, то аналогом уравнений движения являются уравнения Гамильтона-Якоби.
Следует отметить, что все формулировки классической механики, основанные на голотехнических принципах, являются менее общими, чем формулировки, основанные на уравнениях движения. Не все механические системы имеют уравнения движения, представленные уравнением Эйлера-Лагранжа, уравнением Гамильтона или уравнением Гамильтона-Якоби. Однако все формулировки полезны как с практической точки зрения, так и плодотворны с теоретической. Лагранжевая формулировка оказалась особенно полезной в теории поля и релятивистской физике, в то время как уравнения Гамильтона и Гамильтона-Якоби полезны в квантовой механике.
Сегодня существует три типа ситуаций, в которых классическая механика больше не отражает реальность.
Свойства микромира невозможно понять в рамках классической механики. Особенно в сочетании с термодинамикой это создает ряд противоречий (см. классическую механику).
Адекватным языком для описания свойств атомов и субатомных частиц является квантовая механика. Подчеркивается, что переход от классической к квантовой механике — это не простая замена уравнений движения, а полная реконструкция всего набора понятий (что такое наблюдаемая физическая величина, процесс измерения и т.д.).
На скоростях, близких к скорости света, даже классическая механика перестает функционировать, и необходимо перейти к специальной теории относительности. Этот переход также предполагает полный пересмотр парадигмы, а не простую модификацию уравнений движения. Однако, если пренебречь новым взглядом на реальность, чтобы попытаться вывести уравнение движения на путь F = ma, то мы должны ввести датчик массы, компоненты которого растут со скоростью. Эта конструкция уже давно стала источником многих недоразумений, поэтому ее не рекомендуется использовать.
Классическая механика становится неэффективной, если учитывать системы с очень большим количеством частиц (или большим количеством степеней свободы).
В этом случае практический переход на статистическую физику.
Примеры похожих учебных работ
Предмет механики и её разделы
. данному признаку в рамках механики выделяют такие разделы: классическая механика; релятивистская механика; квантовая механика. Классическая механика, Релятивистская механика, Квантовая механика Механическая система Механика занимается изучением так .
Механика Ньютона — основа классического описания природы
. основе динамики и составляют основной раздел классической механики. Непосредственно их можно применять к простейшему случаю движения, когда движущееся тело рассматривается как . Ньютона явилась основой для многих технических достижений в .
Возникновение и развитие механики жидкости и газа
. обобщена на случай любого движения как несжимаемой жидкости, так и сжимаемого газа и служит основой современной механики вязкой жидкости. Сопротивление трения, по Ньютону, оказывается пропорциональным первой степени скорости, остальные составляющие .
Биофиз.РЕМИЗОВ. Механика. Акустика глава 4 Некоторые вопросы биомеханики
. корреляции определяет не только степень, но и направление взаимосвязи между величинами. Если отсутствие функциональной . корреляции с увеличением одного значения увеличивается и другое. Если коэффициент корреляции отрицательный, увеличение .
Научная теория и ее структура
. Научная теория - это система знаний, описывающая и объясняющая определенную совокупность явлений, дающая обоснование всех выдвинутых положений и сводящая открытые в данной области законы к единому основанию. .
Читайте также: