
Автоматизация объектов процессов непрерывного дозирования сыпучих материалов реферат
Обновлено: 08.07.2024
Дозирование применяется в любом виде промышленности, так или иначе связанной с переработкой и транспортировкой сырья. Эффективность использования сырьевой базы в промышленности во многом зависит от точности дозирования компонентов. При этом и качество выпускаемой продукции также в большей степени зависит от точности состава компонентов. В настоящее время технические базы отечественных предприятий как морально, так и технически устарели и не являются конкурентно способными в производстве высококачественной продукции. Характерными примерами могут служить комбикормовая, металлургическая и химическая промышленности. Некоторые виды производства, такие как производство медикаментов требуют высокой точности дозирования компонентов.
Содержание
Введение……………………………………………………………….….………6
1. Разработка функциональной схемы автоматической системы дозирования сыпучих материалов……7
2. Расчет мощности двигателей шнековых питателей. Выбор двигателя. 9
3. Выбор силового электрообрудования……………………………………. 11
3.1. Выбор преобразователя частоты..…………………………..….…. …11
3.2. Выбор контакторов……. ………………………………..……………13
3.3. Выбор источников питания……………………………….……………14
3.4. Выбор автоматических выключателей….……………………………..14
3.5. Выбор шкафов…………………………………………………………..15
3.6. Выбор кабелей…………………………………………………………..16
4. Выбор датчиков и элементов измерительной системы.………..…………..18
4.1. Датчик веса..….….….……….……….…….…….…..…….……..18
4.2. Нормализатор…………………….………………………. 18
4.3. Датчик положения..…………….………………………………..……. 19
5. Выбор элементов системы управления……..……………………………….21
5.1. Выбор контроллера…..……….……….…….…….…..…….……..21
5.2. Выбор удаленных устройств сопряжения с объектом.…. 23
6. Структурна схема системы управления процессом дозирования сыпучих материалов. Оптимизация контура веса…26
7. Разработка имитационной модели автоматической системы дозирования сыпучих материалов……27
Заключение……………………………………………………………….….…. 30
Список литературы…………………………………………………. ……. …31
Приложение …………………………………………………………………. …33
Работа состоит из 1 файл
курсовой_готово.doc
1. Разработка функциональной схемы автоматической системы дозирования сыпучих материалов……………………………………………….… ……..…….7
2. Расчет мощности двигателей шнековых питателей. Выбор двигателя. 9
3. Выбор силового электрообрудования……………………………… ……. 11
3.1. Выбор преобразователя частоты..…………………………..….…. …11
3.3. Выбор источников питания……………………………….……………14
3.4. Выбор автоматических выключателей….……………………………..14
4. Выбор датчиков и элементов измерительной системы.………..…………..18
5. Выбор элементов системы управления……..……………………………….21
5.2. Выбор удаленных устройств сопряжения с объектом.…. 23
6. Структурна схема системы управления процессом дозирования сыпучих материалов. Оптимизация контура веса………………………………….…….26
7. Разработка имитационной модели автоматической системы дозирования сыпучих материалов………………………………..……………… ……………27
Дозирование применяется в любом виде промышленности, так или иначе связанной с переработкой и транспортировкой сырья. Эффективность использования сырьевой базы в промышленности во многом зависит от точности дозирования компонентов. При этом и качество выпускаемой продукции также в большей степени зависит от точности состава компонентов. В настоящее время технические базы отечественных предприятий как морально, так и технически устарели и не являются конкурентно способными в производстве высококачественной продукции. Характерными примерами могут служить комбикормовая, металлургическая и химическая промышленности. Некоторые виды производства, такие как производство медикаментов требуют высокой точности дозирования компонентов.
Перспективные направления развития технической базы представленных выше промышленностей предусматривают техническое перевооружение и реконструкцию с созданием компактных, легко управляемых технологий с минимальным числом сырьевых потоков. Такие технологические схемы позволят управлять технологическими процессами с помощью микропроцессорных электронно-вычислительных машин на основе математических методов, а впоследствии использовать в целом автоматические системы управления технологическими процессами (АСУ ТП). Автоматизация процессов производства приводит к усложнению технической базы и в тоже время к облегчению управлением производством. При этом важным показателем автоматизации процессов является скорость их выполнения или другими словами производительность системы. Снижение затраченного времени на выполнение любой операции приводит к ускорению процесса и, следовательно, к повышению производительности.
Повышение производительности и точности процесса дозирования с помощью автоматизированной системы приводит к повышению качества и количества выпускаемого продукта.
- Разработка функциональной схемы автоматической системы дозирования сыпучих материалов
Технологический процесс дозирования и смешивания широко используется в пищевой, строительной, фармацевтической и т.д. отраслях промышленности для приготовления ответственных и дорогостоящих смесей. Автоматизация технологического процесса направлена на оптимизацию системы по критериям максимальной производительности при заданной точности дозирования. Так как получение качественной и конкурентоспособной продукции возможно только при автоматизации процесса дозирования и смешивания сыпучих материалов.[1]
Функциональная схема автоматизации процесса дозирования и смешивания сыпучих материалов представлена на рисунке 1.
Рисунок 1 – Функциональная схема автоматизированной системы дозирования и смешивания
В состав оборудования входят:
- 6 расходных бункеров (РБ), содержащих дозируемые компоненты;
- 6 шнековых питателей (ШП);
- бункер-дозатор грузоподъемностью до 5000 кг, установленный на 3-х тензодатчиках (ТДВ);
- бункер-смеситель, оснащенный асинхронным двигателем смесителя мощностью 15кВт и двигателем рыхлителя;
- транспортная подсистема отгрузки готовой продукции.
- Расчет мощности двигателей шнековых питателей.
- полная защита двигателя;
- встроенный ПИД-регулятор;
- управление по вольт-частотной характеристике U/f;
- язык команд пульта управления – русский;
- аналоговые и цифровые входы/выходы для регулирования и дистанционного управления;
- возможность дистанционного управления и мониторинга по RS-232/RS-485 (протокол MODBUS);
- питание 380 В, 50 Гц.
- Непрерывное дозирование материалов в заданной пропорции без компенсации интегральной ошибки подаваемых материалов;
- Непрерывное дозирование материалов в заданной пропорции без учета требований по обеспечению текущей пропорции между материалами;
- Непрерывное дозирование материалов исходя из заранее заданной дозы одного материала, проходящего по конвейеру, что применимо только для ряда производств;
- Компенсация интегральной ошибки путем изменения скорости конвейера ведущего материала, что также не применимо для ряда производств;
- Сложность и дороговизна дозирующих установок для обеспечения требуемого соотношения двух расходов сыпучих материалов;
- Дозирование материалов без учета изменения их свойств (влажность, дисперсность), что оказывает существенное влияние на работу систем управления непрерывно-поточными дозаторами и качество получаемой смеси.
- Отсутствия серийно выпускаемых промышленностью приборов для непрерывного измерения параметров качества продуктов и исходного сырья;
- Громоздкости адаптивных систем управления, реализованных на традиционных технических средствах автоматики, приводящей к снижению их работоспособности;
- Высокой трудоемкости разработки адаптивных систем управления ввиду большого разнообразия задач непрерывно-поточного дозирования и особенностей технологических процессов для различных производств;
- Высокой стоимости адаптивных систем управления, реализованных на традиционных технических средствах.
В целом объект автоматизации включает в себя 11 асинхронных электродвигателей мощностью от 0,75 кВт до 15 кВт.
Материал поочередно поступает из расходных бункеров в бункер-дозатор, где в соответствие с заданным весом (рецептом) осуществляется дозирование. Сигнал пропорциональный текущему весу снимается с 3 тензодатчиков и поступает в нормирующий усилитель (НСУ) где суммируется, нормируется в стандартный сигнал напряжения и в таком виде поступает в устройство сопряжения с объектом (УСО 3), с помощью которого происходит общение с контроллером через интерфейс связи RS-485. По окончании процесса дозирования всех компонентов масса поступает в бункер-смеситель. В нем происходит смешивание компонентов до однородной массы. Время смешивания зависит суммарной массы компонентов. Готовая смесь поступает на транспортер отгрузки готовой продукции. Управление двигателями шнековых питателей ведется от одного преобразователя частоты через модуль релейной коммутации (УСО1) по сигналу микроконтроллера через RS-интерфейс. Двигатель смесителя (М8), рыхлителя (М9) и двигатель задвижки бункера-смесителя подключаются к сети через модули релейной коммутации УСО4, двигатель транспортера готовой продукции (М11) – через УСО6, которые управляются от микроконтроллера через RS-интерфейс. Обратные сигналы с концевых выключателей, сигналы состояния контакторов сообщаются контроллеру посредством УСО 2,УСО 5, УСО 7 также через интерфейс связи.
При проектировании системы дозирования сыпучих материалов, необходимо правильно выбрать мощность двигателя и скорость вращения шнекового питателя.
По техническому заданию на проектирование известны параметры механизма и желаемая производительность системы. Производительность шнекового питателя прямо пропорциональна скорости вращения механизма и находится по формуле:
D – внешний диаметр шнека;
d – диаметр вала;
S – шаг винта шнека;
n – скорость вращения шнекового питателя;
j – коэффициент производительности. [2]
Для горизонтального шнека пассивная область целиком размещается на шнеке при условии S/D≤1 и следовательно применима формула:
Из формулы (*) можно определить скорость вращения шнекового питателя для получения необходимой производительности механизма.
Величина пассивной поверхности на шнеке
где – угол трения материала о поверхность шнека (таблица 2).
Площадь витка винта
где R – радиус винта.
где w – угловая скорость вращения шнекового питателя.
Удельный расход энергии
где m=0,8 – коэффициент трения, L – длина шнека, – насыпная объемная масса материала (кг/м 3 ) (таблица 2).
Мощность на валу привода
По каталогу компании OOO "ТЕХПРИВОД" выбираем асинхронный двигатель Рн³N.[3]
Выбираем цилиндрический двухступенчатый соосный мотор-редуктор типа 4МЦ2С производства ООО “Подольск-привод” стоимостью 30450 руб. Основные технические характеристики представлены в таблице 3.
Межосевое расстояние, мм
Подробнее технические характеристики представлены в Приложении 1.
3.1. Выбор преобразователя частоты.
По условию технологического проекта двигатели шнековых питателей запитываем от преобразователя частоты последовательно, поэтому мощность преобразователя частоты должна соответствовать мощности выдранного двигателя.
Также преобразователь частоты должен иметь возможность дистанционного управления по RS-232/RS-485 (протокол MODBUS), управление по частотной характеристике U/f. Выбранный закон управления обеспечивает необходимый диапазон и точность регулирования привода.
Исходя из определенных выше условий, выбираем преобразователь частоты общепромышленного применения компании ПФК Веспер серии ЕI – 7011 типа 010Н.[4]
Широко используются в технологическом оборудовании , где применяется управляемый электропривод: смесителях, дозаторах, производственных линиях, системах водоснабжения, вентиляции, дымососах, подъемно-транспортном и т.п. оборудовании.
Преобразователи предназначены для управления общепромышленным приводом, которому не требуется высокоточное поддержание скорости (±2%) и/или момента на валу двигателя (привод станочного оборудования, транспортеры, конвейеры, грузоподъемные механизмы). Таким образом, данная модель преобразователя частоты удовлетворяет техническому проекту.
Основные технические данные приведены в таблице 4.
Модель EI – 7011 - 010H
Максимальная выходная мощность (мощность применяемого электродвигателя), кВт
Полная мощность преобразователя, кВА
Номинальный выходной ток, А
Трехфазное 380…460 В (пропорционально входному напряжению)
Номинальная выходная частота
Вплоть до 400 Гц (достигается посредством программирования)
Номинальное входное напряжение и частота
Трехфазное 380…460 В 50/60 Гц
Допустимые колебания входного напряжения
Допустимые колебания частоты входного напряжения
Данная модель имеет встроенный тормозной прерыватель и один тормозной резистор сопротивлением 80 Ом. Встроенный модуль интерфейса RS-485 в комплекте с соединительным шлейфом поставляется при заказе.
Поставщик: ГРУППА КОМПАНИЙ РУСЭЛТ, стоимость: 28500 руб.[5]
3.2. Выбор контакторов.
Выбор контакторов осуществляется по номинальной мощности и/или номинальному току двигателей, а также напряжению питания катушки контактора равному напряжению питания сети 220 В, возможностью установки/наличию дополнительного нормально замкнутого контакта.
В соответствии с приведенными требованиями выбираем контакторы серии КМИ компании IEK.
Целью курсовой работы является выбор, расчет и анализ технических средств автоматизации технологического процесса дозирования.
При выполнении работы необходимо решить задачи:
- описать технологический процесс;
-провести обзор и анализ схем автоматизации процесса дозирования;
-описать структурную схему автоматизации процесса дозирования и других элементов;
-выполнить анализ схемы автоматизации;
-разработать вопросы охраны труда и охраны окружающей среды.
Работа содержит 1 файл
Автоматика Курсовая.docx
Министерство сельского хозяйства и продовольствия
Кафедра технического обеспечения производства и переработки продукции животноводства
РАСЧЁТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе на тему:
Автоматизация процесса дозирования материала
Студентка 1 группы
4 курса ИТФ Савенкова Н.В.
Доцент кафедры ТОПиППЖ Богданович П.Ф.
Целью курсовой работы является выбор, расчет и анализ технических средств автоматизации технологического процесса дозирования.
При выполнении работы необходимо решить задачи:
- описать технологический процесс;
-провести обзор и анализ схем автоматизации процесса дозирования;
-описать структурную схему автоматизации процесса дозирования и других элементов;
-выполнить анализ схемы автоматизации;
-разработать вопросы охраны труда и охраны окружающей среды.
В первом разделе сделан анализ процесса дозирования применительно к хлебопекарной промышленности. Рассмотрен принцип действия весового дозатора непрерывного действия. Во втором разделе приводится описание структурной схемы автоматизации процесса дозирования. В третьем разделе приводится анализ САР, анализ устойчивости системы, определяется статическая ошибка. В четвертом разделе приводятся основы безопасности жизнедеятельности при эксплуатации автоматических систем дозирования.
1. Описание и анализ технологического процесса 7
2. Описание структурной схемы автоматизации процесса дозирования 10
3.1. Передаточная функция САР 11
3.2. Анализ устойчивости системы 13
3.3. Качество управления системы 17
3.4. Определение статической ошибки 19
4. Безопасность жизнедеятельности 20
Список используемой литературы 23
Хлебопекарная промышленность является одной из крупнейших отраслей пищевой промышленности республики, она призвана обеспечивать население страны хлебобулочными изделиями, являющимися одними из основных продуктов питания.
Для увеличения выпуска хлеба и хлебобулочных изделий ежегодно реконструируются и вводятся хлебопекарные предприятия. Постоянно происходит техническое перевооружение и оснащение предприятий хлебопекарной отрасли АПК страны современным технологическим оборудованием, новейшей техникой, комплексно механизируются и автоматизируются производства. Проводится большая работа по повышению качества, улучшению и обогащению ассортимента хлебобулочных изделий.
Многие тысячелетия техника и технология производства хлеба оставались практически неизменными. Хлебопекарная промышленность сегодня - это тысячи хлебозаводов, оснащенных современным оборудованием для производства хлебобулочных изделий на любой вкус. Муку на такой хлебозавод доставляют муковозы. Здесь они выгружаются при помощи пневмосистем в бункера, вмещающие по несколько десятков тонн этого продукта. Мука в этих бункерах хранится, и по мере надобности по трубам подается на производство. Из бункеров для хранения муки поступает на просеивающие устройства, снабженные сильными магнитами для улавливания мельчайших частиц железа, которые могут остаться в муке после помола зерна. Далее мука попадает в производственные силосы, а из них - в цех, где готовят тесто. Современные агрегаты для замеса и брожения теста представляют собой сложные механизмы, заменяющие труд многих людей. По заданной программе они дозируют муку, воду, раствор дрожжей, месят опару, направляют ее на брожение, которое так же осуществляется в строго определенное время при строго определенной температуре.
Автоматизированные дозаторы дозируют муку, соль, сахар и другое сырье, необходимое для того или иного сорта хлеба по утвержденной рецептуре. Мощные тестомесильные машины в течении нескольких минут замешивают тесто, которое бродит положенное ему время и направляется в другой цех для деления и формования будущего батона, буханки, булки, каравая. Далее полуфабрикат направляется в печь.
Целью курсовой работы является анализ системы автоматического регулирования технологического процесса дозирования. Данный процесс встречается на всех стадиях производства хлебобулочных изделий, следовательно данная тема является актуальной и востребованной.
1. Описание и анализ технологического процесса
Дозирование — измерение количества вещества путем определения его массы или объема. По структуре рабочего цикла дозирование бывает непрерывным или дискретным, а по принципу действия — объемным или весовым. Объемные дозаторы непрерывного действия подают продукт равномерным потоком; при этом объем продукта, подаваемого в единицу времени, определяется скоростью подачи или площадью поперечного сечения потока продукта. При постоянном сечении потока в дозирующих устройствах устанавливают специальные приводные механизмы для регулирования скорости подачи продукта в необходимых пределах. При втором варианте дозирующие устройства оснащают механизмами для изменения потока подаваемого продукта в процессе его перемещения [1].
Дискретное дозирование заключается в периодическом повторении циклов измерения дозы продукта и подачи ее на упаковывание. При дискретном объемном способе дозирующее оборудование отмеривает порцию обычно с помощью мерной камеры заданного объема. Дискретное весовое дозирование основано на отмеривании дозы определенной массы.
В перерабатывающих производствах наиболее широкое применение получили объемный порционный и объемный непрерывный способы.
Для приготовления смесей из сыпучих продуктов в зависимости от конструкции рабочего органа применяют, как правило, объемные дозаторы — барабанные, тарельчатые, шнековые, мерные емкости и массовые — бункерные с противовесом.
Для дозирования влажных рассыпных продуктов обычно применяют ленточные или шнековые транспортеры, оборудованные средствами для регулирования расхода, которые включаются в строго определенное время.
Жидкие продукты дозируют в основном с помощью мерных емкостей различных конструкции.
Для дозирования сыпучих пищевых продуктов в крупногабаритную тару (мешки и пакеты) на перерабатывающих предприятиях широко применяют весовые дозаторы.
Барабанные дозаторы бывают двух типов: с цилиндрическими или гранеными барабанами и секторные (ячейковые или лопастные).
Цилиндрические, гладкие и мелкорифленые барабаны применяют для порошковых и мелкозернистых, граненые — для мелко- и среднекусковых материалов.
Окружная скорость барабанов составляет 0,025. 1 м/с. Такие дозаторы обычно устанавливают под бункерами. Коэффициент заполнения желобов 0,8. 0,9.
Шнековые дозаторы применяют для подачи порошкообразных материалов (муки) в тех случаях, когда возможное измельчение отдельных частиц не имеет значения.
Вибрационные дозаторы могут подавать различные материалы. Рекомендуемое число колебании лотка до 3000 мин -1 , амплитуда колебаний — до 4 мм. При этом происходит кратковременный отрыв материала от дна лотка, и в течение некоторого промежутка времени материал находится в состоянии свободного полета. Это уменьшает длительность контакта груза с лотком и снижает износ последнего.
Ленточные дозаторы применяют для подачи и дозирования сыпучих, плохосыпучих, а также влажных слеживающихся материалов. Их можно устанавливать горизонтально или наклонно.
Верхняя ветвь ленты лежит на опорных роликах или скользит по неподвижному металлическому настилу. Вдоль ленты устанавливают борта, создающие желоб. Бункер устроен так, чтобы на ленту непосредственно не передавалось давление материала.
Слоя материала на ленте по высоте регулируют заслонкой. Рекомендуемая скорость ленты 0,1. 0,5 м/с.
Основной режим работы системы – автоматический. Процесс приготовления теста циклический.
Система автоматического регулирования осуществляет подачу муки из бункера и другого сырья заданного рецептурой в тестомесильную машину их перемешивание в течении заданного времени и подачу звукового сигнала за 15с до окончания процесса приготовления теста. После выгрузки приготовленного теста цикл повторяется, и все операции в том же порядке начинаются заново.
Таким образом, для ускорения технологического процесса и получения более качественной продукции необходима автоматизация дозирования.
Дозирующие устройства находят применение на различных участках технологических линий предприятий дорожного строительства. Их используют длядозирования сыпучих и жидких материалов, в них может быть заложен объемный или весовой принцип дозирования, порционный или непрерывный способ переработки поступающих материалов. Однако, учитывая только те особенности дозирующих устройств, которые определяют выбор способа автоматизации, их можно классифицировать на циклические и непрерывные.
Весовые дозаторы непрерывного действия предназначены для выдачи постоянного количества материала в единицу времени. Например, дозаторы марки С-613 производительностью 7-30 т/ч служат для весового непрерывного дозирования инертных заполнителей бетона с максимальной крупностью до 40мм, на передвижных бетоносмесительных установках непрерывного действия работающих на открытом воздухе. Это и определяет конструкцию дозатора с простой механической системой регулирования.

Рисунок 9.1 – Схема дозатора марки С-613
Чувствительным элементом системы регулирования служит весовой транспортер маятникового типа, подвешенный на призменной подвеске. Изменение производительности дозатора Q преобразуется весовым транспортером в момент силы тяжести М и в угол поворота φ транспортера. С рамой весового транспортера связана заслонка, которая определяет величину слоя материала на ленте, а тем самым и производительность дозатора. Значение времени запаздывания таких дозаторов составляет от 5 до 30 сек, что сказывается на качестве приготовления смеси.
Однако колебания напряжения и частоты питающей сети, а также нагрузочного момента привода ленты приводят к значительной нестабильности скорости ленты и существенным ошибкам дозирования. Именно поэтому в настоящее время создается все большее число систем дозирования, в которых регулирование осуществляется непосредственно по расходу. Принцип действия таких дозаторов основан на компенсации отклонения расхода от заданного. Расход получается умножением сигналов, пропорциональных массе материала и скорости ленты конвейера. Управляющее воздействие осуществляется путем изменения скорости ленты. В качестве примера подобных систем управления может быть рассмотрен дозатор С-781, предназначенный для дозирования цемента и других пылевидных материалов.
Автоматический регулятор такого дозатора включает в себя: весовой ленточный транспортер, являющийся чувствительным элементом; преобразователь, преобразующий изменение веса материала в электрический сигнал или сигнал другого типа; регулятор и регулирующий орган или исполнительный механизм, обеспечивающий поддержание постоянства подачи материала питателям. Схема такого дозатора имеет вид:
Рисунок 9.2 - Схема дозатора марки С-781
Здесь постоянство соотношения подачи материалов обеспечивается за счет регулирования скорости приводных двигателей. Это достаточно точная система, но требует в приводе двигатели постоянного тока.
 |
Теперь рассмотрим непрерывный дозатор с электрической системой автоматического регулирования, дозатор С-313 с параллельным конвейером, который работает по следующей схеме.
Рисунок 9.3 - Схема автоматического дозатора марки С-313
Лента весового конвейера 2 приводится в движение через редуктор от двигателя. Вибропитатель 4 с постоянной производительностью подает на ленту дозируемый материал. Действующее от массы усилие на ленту конвейера передается через рычажную систему 3 на уравновешивающую часть 1. Отклонение рычага с уравновешивающим грузом от заданного положения вызывает соответствующее перемещение плунжера индуктивного датчика 6. От него сигнал через электронную аппаратуру 5 передается электромагнитному вибропитателю.
Производительность вибропитателя можно изменять, повышая или понижая напряжение в обмотках его электромагнитов. Можно менять при необходимости наклон лотка, скорость движения ленты, положение уравновешивающего груза.
 |
Рассмотренные принципиальные схемы дозаторов непрерывного действия позволяют синтезировать достаточно общую для них функциональную схему автоматического управления (рисунок 9.4), которая состоит из объекта управления — питателя 1, подающего материал на ленту конвейера, и собственно автоматического регулятора.
Рисунок 9.4 – Функциональная схема дозаторов непрерывного действия
Регулятор включает в себя: ленточный конвейер 2, который играет роль чувствительного элемента системы управления; усилительно-преобразующие элементы 3 (весовой механизм и датчик), преобразующие изменения массы материала на ленте конвейера в электрический сигнал; промышленный регулятор 4,формирующий закон управления и воздействующий через регулирующий орган 5 на расход материала питателем.
Наиболее важными особенностями непрерывных дозаторов, рассматриваемых как системы автоматического регулирования расхода сыпучих материалов, является способ управления.
Способ регулирования характеризуется видом информации о текущем значении расхода.
При этом существенным является уравнение:
Q = s γ h V υ,
определяющее зависимость между расходом Q питателя, массой материала на ленте конвейера и скоростью ленты υ (γ — насыпная плотность материала, s и h — соответственно ширина конвейерной ленты и высота слоя материала на ней).
Существует большое количество различных модификаций дозирующих устройств, в которых скорость ленты конвейера принимается постоянной (например, рассмотренные ранее дозаторы С-613 и С-313), а измеряемый сигнал от массы материала на ленте — пропорциональным значению расхода. Дозаторы такого типа называются дозаторами с регулированием по массе. Общим для всех вариантов управления является наличие нерегулируемого привода скорости ленты конвейера.
Принцип управления, основанный на поддержании неизменного среднего значения массы материала на ленте конвейера, осуществляется по косвенному параметру. Такое управление эффективно только в том случае, если косвенный параметр полностью характеризует процессы, происходящие в объекте.
Рассмотренные выше схемы непрерывного дозирования могут быть упорядочены по критерию минимума ошибки дозирования. Наименьшими потенциальными возможностями обладают дозаторы с управлением по массе. В первую очередь это вызвано нестабильностью скорости привода и инерционностью регулятора.
Повышения качества дозирования можно добиться за счет применения дозаторов с управлением по производительности. Дальнейшее улучшение динамических параметров дозаторов непрерывного действия требует усложнения структуры системы управления.
Можно предполагать, что если управляющее воздействие, пропорциональное сигналу ошибки, подавать не только на привод ленты конвейера, но и на питатель, т.е. управлять одновременно скоростью ленты и производительностью питателя, то можно еще более снизить ошибку дозирования. Для реализации такой структурной схемы необходимо, чтобы сигнал, пропорциональный управляющему воздействию (скорости ленты), оказывал влияние также и на высоту слоя материала на ленте конвейера, и тем самым уменьшал влияние возмущающего воздействия. Принципиальная схема такого дозатора может иметь следующий вид:

Рисунок 9.5 - Принципиальная схема дозатора С-633
Это дозатор С-633 с прямой системой регулирования массы материала на ленте конвейера и регулируемым приводом ленты (рисунок 9.5). Чувствительным элементом автоматической системы служит конвейер маятникового типа, подвешенный на призменной подвеске, ось которой находится на средней линии бункера. Изменение производительности дозатора Q, вызванное, например, изменением насыпной массы материала, преобразуется конвейером в момент силы тяжести Л/и в угол поворота φ конвейера. С рамой конвейера шарнирно связан рычаг заслонки, который определяет толщину слоя материала на ленте, а тем самым и производительность дозатора. Дозатор с помощью задатчика З может быть перенастроен на новую производительность местным изменением скорости движения ленты, которая измеряется тахогенератором ТГ. Стабилизация скорости конвейера обеспечивается регулятором АР через исполнительный механизм ИМ и вариатор В.
Циклические дозаторы
Наряду с дозаторами непрерывного действия в различных технологических процессах широко используются дозаторы периодического действия. Это весовые устройства, которые состоят из ковша, загрузочных устройств, весового механизма и аппаратуры управления. Усилие от ковша, подвешенного на призменных или упругих опорах, передается через систему рычагов на главное коромысло. Главное коромысло связывается с циферблатным указателем массы. Весовой механизм имеет также рецептурные коромысла, снабженные передвигающимися гирями дляустановки значения отмериваемой дозы.
Циферблатный указатель массы оборудован поворотным диском с расположенными на нем датчиками, фиксирующими степень загрузки весового ковша. При заполнении бункера стрелка циферблатной головки, вращаясь, поочередно заставляет срабатывать датчики поворотного диска.
Принципиальная схема весового дозатора АВДЦ-425 показа на рисунок 9.6 Автоматический весовой дозатор для цемента состоит из аэрационного питателя 1, весового ковша 2, рычажной системы 3 и циферблатного указателя 4.
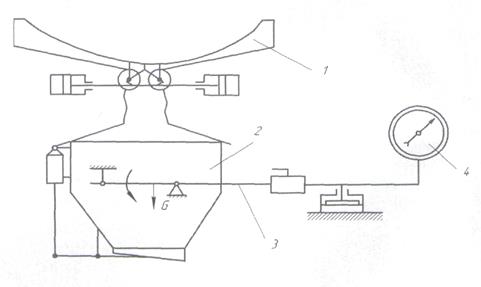
Рисунок 9.6 - Схема автоматического дозатора АВДЦ-425Ф
При включении питателя происходит заполнение ковша, который через рычажную систему вращает стрелку циферблатной головки до замыкания соответствующего контакта на указателе массы. При этом включаются пневмоцилиндры закрытия впускного затвора, и поступление материала в весовой бункер прекращается. Отдозированная таким образом порция материала выгружается из бункера самотеком при включении пневмоцилиндра открытия выпускного затвора. Рассмотренный дозатор циклического действия оснащен простейшей системой управления с минимально необходимым набором функциональных элементов, реализующих процесс набора заданной дозы (рисунок 9.7). Объектами управления (ОУ) в системе служат питатели разнообразных типов.
Управляемый параметр — масса дозируемого вещества G — определяется ковшом с рычажной подвеской (ВБ) и циферблатным указателем массы (Ц), которые выполняют роль чувствительного элемента. Циферблатный указатель выполняет функцию сравнения текущего значения массы с заданием G3.
Исполнительный механизм (ИМ) с регулирующим органом (РО) включаются в работу кратковременно, отсекая подачу материала питателем. Дозатор обладает системой управления дискретного действия с кратковременным восстановлением контура обратной связи, по которому передается воздействие на изменение управляющего параметра — расхода питателя.
Недостатки такого способа управления очевидны.
Перемещение стрелки, фиксирующей изменение массы материала в бункере, испытывает на себе сильное влияние динамического усилия от столба материала, подаваемого питателем, а также от ускорений, получаемых бункером в процессе его заполнения. Система управления по окончании цикла дозирования фиксирует наряду с истинной еще и фиктивную массу, значение которой не может быть откорректировано по линии обратной связи.
Для повышения точности автоматическое управление весовым периодическим дозированием должно осуществляться по специальному алгоритму, учитывающему влияние процесса истечения материала, а также количество материала, поступающего в бункер дозатора после подачи сигнала на закрытие затвора питателя в каждом цикле дозирования.
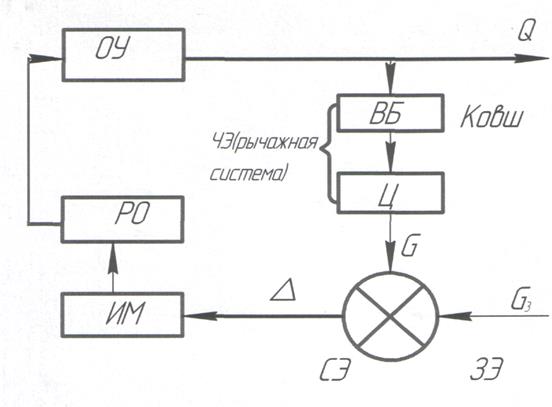
Рисунок 9.7 - Функциональная схема дозатора циклического действия
Одним из обязательных условий нормальной работы таких систем является непрерывный автоматический контроль фактической точности дозирования, обеспечивающий в случае нарушения требуемых допусков остановку процесса приготовления и выдачу обслуживающему персоналу информации о характере отклонения.

Непрерывно-поточное дозирование материалов является операцией многих технологических процессов. От правильной организации процессов непрерывно- поточного дозирования, в частности от применяемых конструкций дозирующих устройств и алгоритмов управления ими, во многом зависят качество готовой продукции, экономия материалов, повышение производительности труда, обеспечение высококачественного ведения технологического процесса. Одной из разновидностей непрерывно-поточного дозирования является добавление к основной массе сырья дополнительного компонента в заданном соотношении (ставится задача поддержания соотношения двух расходов сыпучих материалов).
Современные требования к качеству получаемого исходного сырья требуют обеспечивать соблюдение пропорции не только по суммарному количеству материалов, но и текущую пропорцию между подаваемыми материалами для лучшего их смешивания перед основным технологическим процессом.
Существующие конструкции дозаторов, применяемые в различных производствах и системы управления ими, имеют ряд существенных функциональных ограничений:
Все вышесказанное определяет актуальность постановки работ по созданию дозаторов непрерывного действия с расширенными функциональными возможностями. Одним из путей решения этой задачи является разработка адаптивных систем управления дозаторами. Применение таких систем в процессах дозирования позволит учесть недостаток априорной информации об условиях последующей эксплуатации оборудования, изменения свойств исходного сырья и характеристик объекта в процессе эксплуатации.
До последнего времени развитие адаптивных систем автоматического управления сдерживалось вследствие ряда причин:
Решение перечисленных задач упрощается в случае использования в качестве технической базы для реализации адаптивных систем управления микропроцессорной техники, в частности, микропроцессорных управляющих контроллеров.
Одним из процессов, где требуется обеспечивать соотношение расходов, является непрерывное добавление стекольного боя к шихте в производстве стекла. Для повышения точности дозирования потребовалось разработать адаптивную систему управления непрерывно-поточным дозатором, обеспечивающую оптимальный режим работы дозатора в условиях нестационарности его статических характеристик и флуктуации технологических параметров процесса. Разработанная система управления является комбинированной системой управления, в которой контур, работающий по возмущению, обеспечивает соблюдение текущей пропорции подаваемых материалов, а контур по отклонению компенсирует интегральную ошибку. Контур по возмущению использует в работе математическую модель питателя вибрационного типа, а специально разработанный алгоритм коррекции параметров математической модели минимизирует влияние флуктуаций свойств дозируемого стекольного боя на точность дозирования.
Разработка адаптивной системы управления непрерывно-поточным дозатором для добавления стекольного боя к шихте позволила повысить качество шихты (и стекла, соответственно), снизить перерасходы подачи материалов, позволила проводить непрерывное дозирование в сложных производственных условиях, а также применять дозаторы, оснащенные такой системой управления для других отраслей промышленности.
Читайте также: