
Тормозные режимы асинхронного двигателя кратко
Обновлено: 05.07.2024
Изучение режимов работы асинхронного электропривода, способов управления и опытное определение механических w=f(M) характеристик асинхронного электродвигателя (АД) с короткозамкнутым (к.з.) ротором во всех режимах его работы.
Характеристика режимов работы асинхронного электродвигателя.
Для асинхронных электродвигателей возможны различные режимы работы (двигательные и тормозные).
Двигательные режимы
Двигательных режимов два − в прямом направлении вращения ротора и в обратном. Действие АД основано на принципе вращающегося магнитного поля.
При подведении к фазным обмоткам статора переменного трехфазного напряжения. в статоре образуется вращающееся магнитное поле.
Тормозные режимы
Тормозных режимов три − с отдачей электрической энергии в сеть, режим противовключения и режим динамического торможения.
Тормозной режим с отдачей энергии в сеть (режим рекуперативного торможения) возможен при скорости вращения ротора, превышающей скорость вращения магнитного поля (отрицательное скольжение), то есть имеет место при w>w0.
При переходе двигателя в генераторный режим в следствии изменения знака момента меняет знак активная составляющая тока ротора. В этом случае асинхронная машина от дает активную энергию (мощность) и потребляет реактивную, необходимую для возбуждения. Механическая характеристика в этом режиме является продолжением механической.
Режим противовключения (S
Режим динамического торможения (S
QW3 ("P3") − пакетный выключатель в якорной цепи машины постоянного тока.
Типовая панель позволяет получать двигательные и тормозные режимы электродвигателя.
Для получения двигательного режима необходимо (см. рис. 2.3):
a) включить рубильники QS1 ("Р1" ) и QS2 ("Р2" );
b) рукоятку универсального выключателя SA("KK"), установленную на стенде управления, поставить в нулевое положение;
c) повернуть рукоятку универсального переключателя SA ("KK") вправо или влево через нулевое положение в положение 1 в зависимости от требуемого направления вращения ротора. В нулевом положении рукоятки универсального переключателя срабатывает реле напряжения KV, которое подготавливает нижнюю часть схемы управления к работе. В правом или левом положении рукоятки универсального переключателя включаются контакторы КМ1 и КМЗ или КМ2 и КМЗ, двигатель включается в прямом направлении вращения ротора или в обратном. Кроме этого, получают питание катушки блокировочных реле KV2 и KV3, контакты которых находятся в цепи катушки контактора динамического торможения КМ4. Контакт KV2 размыкается мгновенно, а контакт КV1 замыкается через малую выдержку времени, чем предотвращается подача напряжения на катушку контактора динамического торможения.
Для получения торможения противовключением (перемена полярности двух фаз) необходимо:
a) поставить переключатель SBC1 ("ПН") или SBC2 ("ПН") в замкнутое положение “от себя”, в зависимости от направления вращения ротора;
b) повернуть рукоятку универсального переключателя SA ("КК") влево или вправо через нулевое положение в положение 1 в зависимости от направления вращения ротора;
c) подобрать уставку реле времени КТ таким образом, чтобы электродвигатель отключился от сети при скорости n=0, а не вращался в другую сторону. Изменение уставки реле времени КТ производится при снятом напряжении. При выполнении указанных переключений изменяется чередование фазных напряжений в обмотках статора и направление вращения магнитного поля статора. Противоположно направленный ротору магнитный поток статора тормозит ротор. При правильно подобранной выдержке времени реле КТ оно срабатывает (n=0) и подаст питание на катушку блокировочного реле KV3. Последнее своими нормально замкнутыми контактам, размыкает цепь контакторов КМ1, КМ2, КМЗ и реле KV2 и KV1. Электродвигатель отключается от сети.
Динамический режим торможения заключается в следующем. Необходимо обмотки статора вращающегося электродвигателя отключить от трехфазной сети и подключить их к источнику постоянного тока (повернуть ключ SA ("KK") в нейтральное положение и включить пакетный выключатель QW ("ЗР"), установленный на стенде управления). До проведения предварительно необходимо расчетным путем определить значение постоянного тока, который должен быть в обмотках статора (схема соединений обмоток статора АД - треугольник). В режиме динамического торможения контактор КМ4 включен, а контакторы КМ1, КК2 и КМЗ отключены. В конце торможения реле KV1 размыкает свой контакт в цепи катушки контактора КМ4, контактор КМ4 срабатывает в обратном направлении (отключается). Наличие контактов KV1 и KV2 в цепи катушки контактора динамического торможения КМ4 предотвращает одновременное получение питания катушками контакторов КМ1, КМ2, КМЗ и КМ4 (исключается "наложение" сети постоянного тока на сеть переменного тока) .
При значительных перегрузках по току или при коротких замыканиях в силовой цепи электродвигателя срабатывает одно или несколько реле максимального тока и электродвигатель отключается от источника питания.
Опытное получение режимов работы асинхронного двигателя с использованием только одной типовой панели управления производится без снятия показаний измерительных приборов.
Четырехмашинный агрегат состоит из следующих электрических машин:
1) Испытуемый электродвигатель − трехфазный асинхронный электродвигатель с к.з. ротором (ИД).
2) Нагрузочная машина постоянного тока независимого возбуждения (HM1), которая с помощью муфты жестко соединена с испытуемым электродвигателем.
3) Машина постоянного тока независимого возбуждения (НМ2).
4) Асинхронный электродвигатель с к.з. ротором (АД), жестко связанный муфтой с машиной НМ2.
Таким образом, агрегат состоит из двух пар электрических машин: первая пара ИД и НМ1 (агрегат "переменной скорости") и вторая пара АД и НМ2 (агрегат "постоянной скорости").
Чтобы заставить испытуемый электродвигатель работать в различных режимах, нагрузочная машина НМ1 ставится в различные условия: работает то в качестве генератора, приводимого в движение испытуемым электродвигателем (двигательный режим для испытуемого электродвигатели), то в качестве двигателя, вращающего испытуемую машину (генераторный режим для испытуемого электродвигателя).
Агрегат постоянной скорости играем роль промежуточного звена передачи энергии.
Подготовка агрегата к выполнению работы заключается в следующем (см. рис. 2.4).
1. Поставить все коммутационные аппараты в отключенное положение.
2. Испытуемый электродвигатель включается в трехфазную сеть рубильниками QS1 ("1P") и QS2 ("2P"), установленными на типовой панели управления. Тумблеры SBC1("ПВ") и SBС2 ("ПН"), установленные на стенде управления поставить в разомкнутое (среднее) положение. После чего рукоятку универсального переключателя SA ("KK") повернуть вправо - положение 1.
3. Включается цепь возбуждения нагрузочной машины НМ1 (замкнуть пакетный выключатель QW1 ("P1"), усыновленный на стенде управления, а затем агрегат постоянной скорости (нажать на кнопку "пуск", установленную на стенде управления). Включается цепь возбуждения нагрузочной машины НМ2 (включить пакетный выключатель QW2 ("Р2") и тумблер SBC3 ("T1") в положение П1, установленные на стенде управления) и устанавливается возбуждение обеих нагрузочных машин реостатами R1, и R2, таким образом, чтобы их напряжения были равны. При этом пакетный выключатель QW3 ("P3") должен быть разомкнут. Затем проверяется полярность зажимов и равенство напряжений тумблером SBC4 ("T2"), после чего пакетным выключателем QW3 ("P3") замыкается цепь их якорей.
4. Работу следует начинать со снятия механической характеристики испытуемого двигателя в генераторном режиме Для этого необходимо, чтобы скорость вращения его ротора была больше синхронной, что достигается при помощи машины НМ1, которая должна работать в двигательном режиме со скоростью, превышающей скорость испытуемого двигателя. Выполнение этого условия связано с увеличением напряжения на зажимах машины НМ2, работающей в режиме генератора. Увеличение напряжения на зажимах машины НМ2 осуществляется путем увеличения тока ее возбуждения с помощью реостата R2 в цепи возбуждения. Испытуемый двигатель работает в тормозном режиме асинхронного генератора, отдавая активную энергию в трехфазную сеть. Такой режим называется тормозным с рекуперацией энергии.
5. Установив ток возбуждения нагрузочной машины НМ2 таким, чтобы испытуемой двигатель был нагружен до значения 1,1∙Iн записывают показания приборов, после чего постепенно уменьшают ток возбуждения машины НМ2, отчего скорость вращения и нагрузка испытуемого двигателя будут снижаться. При этом фиксируют показания приборов для пяти-шести значений нагрузки. Уменьшением тока возбуждения машины НМ2 осуществляется плавный переход работы ИД из генераторного режима в двигательный. При этом ИД нагружается машиной НМ1, которая переходит в режим генератора так как ее э.д.с. становится больше э.д.с. машины НМ2. В этом режиме ток в цепи якорей обеих нагрузочных машин пропорционален разности двух э.д.с. (2.20) при дальнейшем увеличении нагрузки испытуемого двигателя скорость ее падения уменьшается до полной остановки, режим короткого замыкания). В режиме короткого замыкания при неподвижном роторе ИД может находиться ограниченное время, так как на зажимах обмотки статора ток значительно выше номинального. В двигательном режиме также необходимо записать показания приборов для пяти-шести значений нагрузки. Скорость вращения ротора ИД измеряется тахометром!
6. Чтобы получить данные для построения механической характеристики ИД в тормозном режиме противовключения (Мс > Мп) , необходимо нагрузочную машину НМ1 перевести в режим двигателя, вращающегося в направлении, противоположном вращающемуся магнитному полю ИД, и тем самым имитировать Мс > Мп, при котором ИД будет работать в тормозном режиме. Для перевода нагрузочной машины НМ1 в двигательный режим необходимо, чтобы вращающий момент машины НМ1 преодолел противоположный ему момент заторможенного испытуемого двигателя. С этой целью следует увеличить ток якоря машины НМ1, сохранив его прежнее направление. При заторможенном роторе ИД ток в цепи якоря нагрузочной машины НМ1 (2.21) при работе в режиме противовключения (2.22) Следовательно, для увеличения тока в якоре машины НМ1потребуется увеличение разности э.д.с. обеих нагрузочных машин, но т.к как э.д.с. машины НМ1 переменит свой знак (по сравнению с предыдущим режимом работы в режиме генератора), то для сохранения прежнего направления тока в якоре машины КМ1 потребуется изменить знак э.д.с. машины НМ2, которая должна стать теперь генератором, питающим машину НМ1, а асинхронная машина агрегата постоянной скорости - ее двигателем. Для создания таких условий работы всех машин нужно переменить направление тока в цепи возбуждения нагрузочной машины НМ1 (тумблер SBC3 ("T1") поставить в положение П2, установленный на стенде управления) и увеличить его в такой степени, чтобы ток в якоре нагрузочной машины НМ1 достиг значения, при котором она станет вращать ИД, создавая условия торможения противовключением. Как только наступит для ИД режим противовключения (Мс > Мп), записать показания приборов для построения механической характеристики в этом режиме.
7. Получение данных для построения механической характеристики асинхронного двигателя в режиме динамического торможения производится при включении испытуемого двигателя по схеме (рис. 2.4). Необходимо обмотку статора вращающегося двигателя отключить от трехфазной цепи и подключить ее к источнику постоянного тока (повернуть ключ SA ("KK") в нейтральное положение и включить QW4("3P"), установленные на стенде управления). До проведения опыта предварительно необходимо расчетным путем определить значение постоянного тока, который должен быть в обмотке статора (схема соединения обмоток статора ИД - треугольник). Время с начала торможения и до полной остановки будет зависеть от тормозного момента, возникающего на валу ИД, запаса кинетической энергии агрегата, определяемой его маховым моментом GД2, и момента статического сопротивления Мс. Вследствие небольшого суммарного момента агрегата ИД-НМ1 время полного торможения до полной остановки оказывается очень малым. Поэтому для получения данных при построении механической характеристики ИД в этом режиме следует искусственно увеличить время торможения путем создания дополнительного вращающего момента на валу испытуемого двигателя, имитируя как бы больший запас кинетической энергии, чем фактически имеют массы самих машин. Для этого поступают следующим образом. Испытуемый двигатель и асинхронный двигатель постоянной скорости включают в трехфазную сеть. Далее устанавливают возбуждение обеих нагрузочных машин с таким расчетом, чтобы их напряжения были равны, проверяют полярность соединяемых зажимов. В этом случае ИД будет работать в двигательном режиме на холостом ходу. Уменьшая ток возбуждения нагрузочной машины НМ2, создают нагрузку на валу испытуемого двигателя (по возможности номинальную или близкую к ней). А затем ИД отключают от сети и подключают обмотку статора к источнику постоянного тока. Увеличивая ток возбуждения нагрузочной машины НМ2, переводят машину НМ1 на работу в режиме двигателя для вращения ротора испытуемого двигателя. Уменьшая ток возбуждения машины НМ2, постепенно снижают скорость вращения ИД и записывают показания приборов для пяти-шести значений нагрузки.
Способы торможения. Тормозные режимы возникают в машине естественно при определенных условиях работы или создаются искусственно с целью ускорения процесса остановки двигателя. Торможение может быть: генераторное (с отдачей энергии в сеть), торможение противовключением и динамическое.
Генераторный режим асинхронной машины и генераторное торможение. Асинхронная машина, работающая в режиме генератора, приводится во вращение посторонним двигателем в направлении вращения поля статора. Частота вращения ротора п в генераторном режиме больше частоты вращения поля n1(n>n1), поэтому скольжение s будет отрицательным и наводимая ЭДС в обмотке статора E1>U. В результате ток статора I1 меняет фазу на 180°. Электромагнитная сила также изменяет направление и возникающий момент противодействует вращению ротора.
Для создания вращающегося магнитного поля необходима реактивная мощность, соответствующая намагничивающему току I1к.р..
Необходимость в реактивной мощности ограничивает широкое применение асинхронного генератора.
Генераторное торможение возникает в описанном выше генераторном режиме за счет противодействующего электромагнитного момента. Например, в грузоподъемной машине при опускании груза частота вращения ротора п может стать больше частоты вращения поля n1. Тогда электромагнитный момент изменяет свой знак и становится тормозным.
3.15.3. Торможение противовключением. Этот способ осуществляется изменением направления вращения поля в работающем двигателе путем переключения любых двух фаз (рис. 3.32). На рисунке показано переключение фаз А и В.
Когда машина работает в двигательном режиме, переключатель находится в нижнем положении 1. При торможении он перебрасывается в положение 2, фазы А и В меняются местами. Поле при этом будет вращаться в противоположном направлении, а электромагнитный момент изменит направление на противоположное.


Рис. 3.32 Рис. 3.33
Под влиянием сил инерции ротор будет продолжать вращаться в прежнем направлении, а электромагнитный момент будет его тормозить. Механическая характеристика 2 при торможении показана на рис. 3.33. Торможение происходит путем перехода из точки а двигательного режима (характеристика 1) в точку b тормозного режима и далее по тормозной характеристике 2 частота вращения падает до нуля (точка с). Когда частота вращения ротора становится равной нулю, двигатель надо отключить от сети, так как в противном случае ротор начнет вращаться в противоположном направлении.
Динамическое торможение. Этот способ осуществляется путем отключения статора от сети переменного тока и включения обмотки статора на сеть постоянного тока (рис. 3.34). В двигательном режиме замкнуты контакты К1 и разомкнуты контакты К2. В тормозном режиме контакты К1 разомкнуты, а К2 замкнуты. В результате МДС статора создает неподвижное магнитное поле.
Взаимодействие магнитного поля статора с током ротора создает на валу двигателя тормозной момент. Механические тормозные характеристики показаны рис. 3.35. В этом случае ротор тормозится до полной остановки без дополнительных устройств.

В случаях, когда скорость работы асинхронной машины выше синхронной, для осуществления торможения используют рекуперативный режим.
Если говорить ближе к реальности, то применяется такой режим в агрегатах машин, подающих большие грузы( например, в подъемниках и экскаваторах), и там, где переключаются полюса.
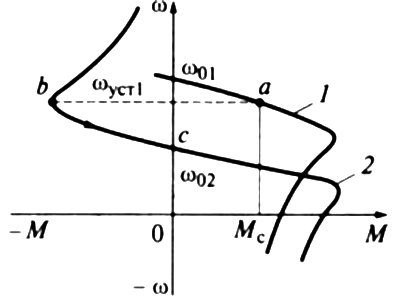
Когда движок начинает работать в режиме генератора меняется знак момента, а следовательно, и знак активной составляющей якоря. Асинхронная машина начинает отдавать свою активную энергию или мощность сети, а потреблять начинает реактивную мощность. Она нужна для возбуждения. Это может возникнуть, например, во время торможения привода с двумя скоростями при переходе от высокой к низкой скорости. Схематически это изображено на рисунке 1а.

Можно сделать предположение, что изначально мотор совершал работу с характеристикой под цифрой 1, находясь при этом в точке а, а вращение происходило со скоростью ωуст1. Когда количество полюсов увеличилось, электромотор начинает работать на характеристике под номером 2. Отрезок второй характеристики, называющийся бс, соответствует моменту торможения, при котором произошла рекуперация мощности в сеть.
Рекуперацию уместно применять и в системе, преобразовывающей чатсоту. Она может быть использована в процессе остановки работы привода или во время перехода от одной характеристики к другой. Для этого частоту напряжения на выходе обязательно снижаются, что приводит к уменьшению синхронной скорости, математически это выглядит так:
Из-за существования такого явления, как механическая инерция, изменение текущей скорости работы (ω) двигателя будет происходить на порядок медленнее, чем смена синхронной (ωо). Текущая скорость также всегда будет выше, чем скорость магнитного поля. Это и становиться причиной возникновения режима торможения, при котором в сеть отдается энергия.
Рекуперацию можно вполне успешно использовать в моторах машин, имеющих дело с грузами, во время их спуска. Чтобы это осуществить, нужно для начала включить движок в направлении спуска (вторая характеристика на рисунке 1б).
Когда торможение закончится, он начнет работу в некоторой точке при скорости -ωуст2. В это время груз будет спускаться при отдаче двигателем энергии в сетью.
Их всех тормозных режимов наиболее экономически выгодным является именно рекуперативный.
Перевести асинхронный электропривод в режим противовключения можно двумя способами. Первый связан со сменой очередности фаз напряжения, что питает двигатель.
Итак, двигатель, к примеру, совершает работу при характеристике номер 1 (это показано на рисунке 1б). При этом фазы напряжения АВС чередуются. Если две любые фазы (мы возьмем В и С) переключить, то есть подключить на место друг друга, мотор перейдет к работе со второй характеристикой. Противовключению будет соответствовать участок графика аб.
Важно отметить момент того, что во время торможения противовключением, значение скольжения электродвигателя меняется с S=2 на S=1.
Вращение ротора в этот момент направлено против вращения магнитного поля, из-за чего скорость работы детали постоянно замедляется. В момент, когда она будет равной нулю, агрегат нужно выключить из сети, потому что машина перейдет в режим двигателя и будет совершать вращение, противоположное предыдущему.
Во время режима противовключения обмоточный ток может быть в 7-8 раз выше своего номинального значение (при холостом ходе). Коэффициент мощности также будет заметно снижен. Говорит о коэффициенте полезного действия вообще не смысла. Электроэнергия (образуется из механической), а также мощность, которой электродвигатель питался, исчезают из-за наличия в якоре активного сопротивления. Полезная энергия отсутствует.
Двигатели с короткозамкнутым ротором при этом на короткое время становятся перегруженными по току. Только при S>1 величина активного сопротивления обмоток якоря станет значительно больше. Это связано с вытеснением тока. В конечном итоге это приводит к снижению и увеличению момента.
Для повышения тормозного эффекта электроприводов, в конструкции которых присутствует фазный ротор, в их якорные цепи вводится добавочное сопротивление. Это ограничивает обмоточные токи и способствует увеличению момента.
По-другому торможение посредством противовключения можно использовать во время активного характера нагрузочного момента. Такой момент появляется на валу электромотора в машинах, которые предназначены для подъема грузов.
Представим, что нам нужно воспользоваться таким механизмом, чтобы спустить груз. При этом нужно также обеспечить торможение его асинхронного движка. Для этого агрегат нужно перевести на характеристику, схематически изображенную под третьим номером на рисунке выше. Для этого включаем в роторную цепь дополнительный резистор.
Момент нагрузки Мс превысит пусковой момент Мп, что приведет к спуску груза со скоростью –ωуст2. При таком торможении скольжение изменится с S=1 на S=2.
Режим электродинамическое торможения выполняется с помощью включения двух статорных обмоток на выбор в любой источник постоянного тока. Используя группу контактов К1, асинхронной машине сперва нужно выключить питание от трехфазного тока, а потом уже, замкнув группу К2, подать на обмотки постоянный ток. Величина этого постоянного тока регулируется сопротивлением (rт) (показано на рисунке 2).

Процесс электродинамического торможения невозможен без следующи сопровождающих его процессов и изменений.
Во время отключения переменного тока, магнитное поле в статоре, естественно, пропадает. После этого уже подключенный источник постоянного способствует возникновению постоянного магнитного поля.
Ротор продолжает работать все так же, по инерции, но только теперь в условиях постоянного магнитного поля.
В обмотках якоря возникает электродвижущая сила, с пропорциональной скорости работы машины частотой вращения вала. Ток в якорной обмотке появляется благодаря возникновению уже упомянутой ЭДС. Этот электроток влияет на появление статического магнитного потока (относительно неподвижного элемента движка).
Момент торможения создают взаимодействующие статорное магнитное поле и электроток в роторных обмотках. Асинхронная машина их двигательного режима переходит в генераторный. Она начинает преобразование кинетической энергии работающего вала в электроэнергию. Последняя, в свою очередь, превращается в тепловую энергию на якорной обмотке и рассеивается.
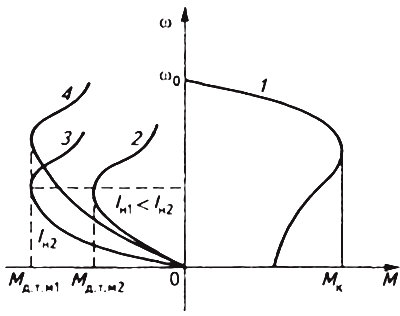
Переходя в динамическое торможение сравниваются две величины: частота и угловая скорость (f=0 и w0=0). Кривая электродинамического торможения при этом проходит через начало координат. Режим торможения закзанчивает в момент, когда двигатель полность остановится (это можно увидеть на рисунке 3).

Насколько эффективным будет торможение зависит от:
- величины постоянного тока в обмотке статора (чем он больше, тем эффективнее торможение);
- дополнительного сопротивления в роторной цепи (если скомбинировать динамическое торможение и торможение с введенным в цепь резистором, эффект повысится). Это также видно из третьего рисунка.Стоит заметить, что чем большее количество резисторов подключено к сети, тем лучше и эффективнее будет торможение. Схематически, на кривой а1 отображена наиболее быстрая остановка из всех возможных;
- схемы, по которой соединены обмотки в статоре. МДС (магнитодвижущая сила) ((F) полностью связана с эффективностью тормоза. Чем больше эта сила, тем лучше эффект. Математически это можно выразить следующим образом:
Рисунки, приведенные ниже, изображают направления, по которым протекает постоянный ток в обмотках. IW – это ампервитки. Из-за одинакового количества витков в каждой обмотке, значение будет зависеть только от показателей тока.
Векторные диаграммы отображают направление МДС. Если сложить векторы по правилам их суммирования, получиться вектор, обозначенный яркой стрелкой.
Способы соединения обмоток в статоре:
- Звезда;
- Треугольник;
- Звезда, две фазы у которой закорочены;
- Звезда с разорванным нулем;
- Треугольник, у которого закорочены две фазы.
Первые две схемы считаются самыми популярными, так как при торможение переключать обмотки не нужно.
Также важно, что напряжение источника, дающего постоянный ток должно быть небольшим из-за невысокого сопротивления в статорной обмотке. Ток выбирают по условию начального момента торможения. Как правило, это примерно 2 Мном.
- просто осуществляется;
- режим включен вплоть до остановки двигателя;
- эффективность режима, особенно с дополнительным сопротивлением.
- возникновение только при условии ;
- возможны срывы моментов при некоторых условиях;
- конденсаторы должны иметь большую емкость, чтобы обеспечить должный эффект на низкой скорости.

Асинхронный движок может работать в последующих тормозных режимах: в режиме рекуперативного торможения, противовключения и динамическом.
Рекуперативное торможение асинхронного мотора
Режим рекуперативного торможения осуществляется в этом случае, когда скорость ротора асинхронного мотора превосходит синхронную.
Режим рекуперативного торможения фактически применяется для движков с переключением полюсов и в приводах грузоподъемных машин (подъемники, экскаваторы и т.п.).
При переходе в генераторный режим вследствие конфигурации знака момента меняет символ активная составляющая тока ротора. В данном случае асинхронный движок дает активную мощность (энергию) в сеть и потребляет из сети реактивную мощность (энергию), нужную для возбуждения. Таковой режим появляется, к примеру, при торможении (переходе) двухскоростного мотора с высочайшей на низкую скорость, как показано на рис. 1 а.

Рис. 1. Торможение асинхронного мотора в основной схеме включения: а) с рекуперацией энергии в сеть; б) противовключением
Представим, что в начальном положении движок работал на характеристике 1 и в точке а, вращаясь со скоростью ωуст1 . При увеличении числа пар полюсов движок перебегает на характеристику 2, участок бс которой соответствует торможению с рекуперацией энергии в сеть.
Тот же вид торможения может быть реализован в системе преобразователь частоты – движок при останове асинхронного мотора либо при переходе с свойства на характеристику. Для этого осуществляется уменьшение частоты выходного напряжения, а тем синхронной скорости ωо = 2π f / p .
В силу механической инерции текущая скорость мотора ω будет изменяться медлительнее чем синхронная скорость ωо , и будет повсевременно превосходить скорость магнитного поля. Из-за этого и появляется режим торможения с отдачей энергии в сеть .
Рекуперативное торможение также может быть реализовано в электроприводе грузоподъемных машин при спуске грузов. Для этого движок врубается в направлении спуска груза (черта 2 рис. 1 б).
После окончания торможения он будет работать в точке со скоростью – ωуст2 . При всем этом осуществляется процесс спуска груза с отдачей энергии в сеть.
Рекуперативное торможение является более экономным видом торможения.

Торможение асинхронного электродвигателя противовключением
Перевод асинхронного мотора в режим торможения противовключением может быть выполнен 2-мя способами. Какой-то из них связан с конфигурацией чередования 2-ух фаз питающего электродвигатель напряжения.
Допустим, что движок работает на характеристике 1 (рис. 1 б) при чередовании фаз напряжения АВС. Тогда при переключении 2-ух фаз (к примеру, В и С) он перебегает на характеристику 2, участок аб которой соответствует торможению противовключением.
Обратим внимание на то событие, что при противовключении скольжение асинхронного мотора меняется от S = 2 до S = 1.
Ротор при всем этом крутится против направления движения поля и повсевременно замедляется. Когда скорость спадает до нуля, движок должен быть отключен от сети, по другому он может перейти в двигательный режим, при этом ротор его будет крутиться в направлении, оборотном предшествующему.
При торможении противовключением токи в обмотке мотора могут в 7–8 раз превосходить надлежащие номинальные токи. Приметно миниатюризируется коэффициент мощности мотора. О КПД в этом случае гласить не приходится, т.к. и преобразуемая в электронную механическая энергия и энергия, потребляемая из сети, рассеиваются в активном сопротивлении ротора, и полезно применяемой энергии в этом случае нет.
Короткозамкнутые движки краткосрочно перегружаются по току. Правда, у их при (S > 1) вследствие явления вытеснения тока приметно растет активное сопротивление ротора. Это приводит к уменьшению и повышению момента.
С целью роста эффективности торможения движков с фазным ротором в цепи их роторов вводят дополнительные сопротивления, что позволяет ограничить токи в обмотках и прирастить момент.
Другой путь торможения противовключением может быть применен при активном нраве момента нагрузки, который создается, к примеру, на валу мотора грузоподъемного механизма.
Допустим, что требуется выполнить спуск груза, обеспечивая его торможение при помощи асинхронного мотора. Для этого движок методом включения в цепь ротора дополнительного резистора (сопротивления) переводится на искусственную характеристику (ровная 3 на рис. 1).
Вследствие превышения моментом нагрузки Мс пускового момента Мп мотора и его активного нрава груз может опускаться с установившейся скоростью – ωуст2 . В этом режиме торможение скольжения асинхронного мотора может изменяться от S = 1 до S = 2.
Динамическое торможение асинхронного мотора
Для динамического торможения обмотки статора движок отключают от сети переменного тока и подключают к источнику неизменного тока, как это показано на рис. 2. Обмотка ротора при всем этом может быть закорочена, либо в ее цепь врубаются дополнительные резисторы с сопротивлением R2д.

Рис. 2. Схема динамического торможения асинхронного мотора (а) и схема включения обмоток статора (б)
Неизменный ток Iп, значение которого может регулироваться резистором 2, протекает по обмоткам статора и делает относительно статора недвижное магнитное поле. При вращении ротора в нем наводится ЭДС, частота которой пропорциональна скорости. Эта ЭДС, в свою очередь, вызывает возникновение тока в замкнутом контуре обмотки ротора, который делает магнитный поток, также недвижный относительно статора.
Взаимодействие тока ротора с результирующим магнитным полем асинхронного мотора делает тормозной момент, за счет которого достигается эффект торможения. Движок в данном случае работает в режиме генератора независимо от сети переменного тока, преобразовывая кинетическую энергию передвигающихся частей электропривода и рабочей машины в электронную, которая рассеивается в виде тепла в цепи ротора.
На рисунке 2 б показана более всераспространенная схема включения обмоток статора при динамическом торможении. Система возбуждения мотора в этом режиме является несимметричной.
Для проведения анализа работы асинхронного мотора в режиме динамического торможения несимметричную систему возбуждения подменяют симметричной. С этой целью принимается допущение, что статор питается не неизменным током Iп, а неким эквивалентным трехфазным переменным током, создающим такую же МДС (магнитодвижущую силу), что и неизменный ток.
Электромеханическая и механические свойства представлены на рис. 3.

Рис. 3. Электромеханическая и механические свойства асинхронного мотора
Черта размещена на рисунке в первом квадранте I, где s = ω / ωo – скольжение асинхронного мотора в режиме динамического торможения. Механические свойства мотора размещены во 2-м квадранте II.
Разные искусственные свойства асинхронного мотора в режиме динамического торможения можно получить, изменяя сопротивление R2 д дополнительных резисторов 3 (рис. 2) в цепи ротора либо неизменный ток I п, подаваемый в обмотки статора.
Варьируя значения R2 д и I п, можно получить хотимый вид механических черт асинхронного мотора в режиме динамического торможения и, тем, подобающую интенсивность торможения асинхронного электропривода.

Даже тогда, когда полезная мощность равна нулю, работающий двигатель потребляет из сети мощность, называемую мощностью холостого хода P0, соответственно по статору протекает ток I0 и на валу двигателя создается момент, называемый моментом холостого хода.
Рабочие характеристики строятся для интервала мощностей от 0 до 1,25 Pном.
cos ф достигает максимального значения при мощности Pном и при увеличении нагрузки остается постоянным.
КПД достигает максимума, когда магнитные потери становятся равными электрическим. Электрические машины проектируются таким образом, чтобы это равенство достигалось приблизительно при номинальной мощности.
К рабочим характеристикам принято также относить механическую характеристику.
Тормозные характеристики асинхронного двигателя
Чтобы уменьшить время выбега и повысить производительность производственного механизма используются электрические способы торможения. У асинхронного двигателя их три: рекуперативное (генераторное торможение), торможение противовключением и динамическое торможение.
1. В режим рекуперативного торможения двигатель переходит под действием производственного механизма. Скорость вращения двигателя становится больше ω0, а момент становится отрицательным. Двигатель отдает запасенную в нем электрическую энергию в питающую сеть, а характеристика является продолжением механической характеристики во второй квадрант.
Механические характеристики асинхронного двигателя при рекуперативном торможении: 1 — исходная характеристика; 2 — характеристики торможения.
2. Торможение противовключением. При этом способе торможения у работающего двигателя меняют порядок чередования фаз. Если двигатель работал в точке a, то при изменении чередования аз он переходит в точку a’, затем скорость снижается до нуля.

Механические характеристики асинхронного двигателя при торможении противовключением: 1 — исходная характеристика; 2, 3 — характеристики торможения.
3. При динамическом торможении асинхронный двигатель отключается от сети переменного напряжения (тока) и в две фазы подается постоянный ток. Скорость двигателя снижается до нуля.
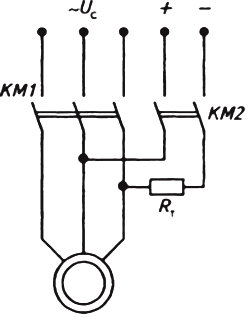
Схема динамического торможения асинхронного двигателя
Механические характеристики асинхронного двигателя при динамическом торможении.
Читайте также: