
Теорема пуансо о параллельном переносе сил кратко
Обновлено: 02.07.2024
Лемма Пуансо. Действие силы на твердое тело не изменится, если перенести эту силу параллельно своему первоначальному положению в любую точку тела, приложив при этом к телу пару с моментом, равным моменту исходной силы относительно этой точки.
Пусть сила приложена к телу в некоторой его точке (рис. 3.8). Приложим в произвольной точке параллельно направлению линии действия силы две силы и , равные по модулю силе и направленные в противоположные стороны. Полученная система сил < , , >. Эту систему сил можно считать состоящей из силы , полученной параллельным переносом силы в точку , и пары ( , ), называемой присоединенной парой с моментом, равным моменту силы относительно точки .
Вопрос 17,18
Приведение плоской системы сил к данному центру (простейшему виду)
Пусть на тело действует система произвольно направленных, лежащих в одной плоскости сил .
Выберем в плоскости произвольную точку О, которую назовем центром приведения и перенесем в эту точку все силы (рис. 29, а )
В результате получим новую систему сил:
с моментами присоединенных пар:
Систему сил перенесенную в точку О заменим одной силой приложенной в той же точке О:
Сложение пар дает одну пару с моментом:
Вектор , равный геометрической сумме всех сил называют главным вектором системы. Величину , равную сумме всех моментов относительно центра О, называют главным моментом системы относительно центра О.
Итак: Всякая плоская система сил, действующая на твердое тело при приведении к произвольно взятому центру О заменяется одной силой , равной главному вектору системы и приложенной в Центре приведения О, и одной парой с моментом , равным главному моменту системы сил относительно центра О.
Для задания плоской системы сил достаточно задать ее главный вектор и главный момент относительно некоторого центра О. Главный вектор не зависит от положения центра приведения O (рис. 29, б).
Главный момент зависит от положения центра приведения О и его всегда нужно указывать.
При приведении произвольно расположенных сил на плоскости к данному центру возникают стандартные случаи, называемые приведением системы к простейшему виду. Рассмотрим эти случаи, имея в виду, что определено согласно (4.2.3), а согласно (4.2.4):
Все силы, приложенные к твердому телу, уравновешиваются.
Все силы приводятся к одной паре сил.
Все силы приводятся к равнодействующей.
Заданная система сил так же приводится к равнодействующей.
В данной главе мы не приводим теорему Вариньона о моменте равнодействующей плоской системы, считая, что параграф 7 главы 2 дает представление как о самой теореме, так и о ее доказательстве.
© 2014-2022 — Студопедия.Нет — Информационный студенческий ресурс. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав (0.01)
Силу можно перенести параллельно линии ее действия, при этом нужно добавить пару сил с моментом, равным произведению модуля силы на расстояние, на которое перенесена сила.
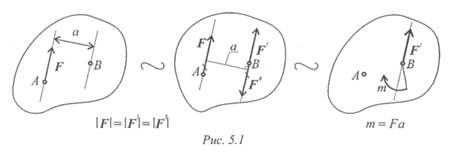
Дано: сила в точке А (рис. 5.1).
Добавим в точке В уравновешенную систему сил (F 1 ; F"). Образуется пара сил (F; F"). Получим силу в точке В и момент пары т.
Приведение к точке плоской системы
произвольно расположенных сил
Линии действия произвольной системы сил не пересекаются в одной точке, поэтому для оценки состояния тела такую систему следует упростить
Тема 1.4. Плоская система произвольно расположенных сил 35
Для этого все силы системы переносят в одну произвольно выбранную точку — точку приведения. Применяют теорему Пуансо. При любом переносе силы в точку, не лежащую на линии ее действия, добавляют пару сил.
Появившиеся при переносе пары называют присоединенными парами.
Дана плоская система произвольно расположенных сил (рис. 5.2).
Переносим все силы в точку О. Получим пучок сил в точке О, который можно заменить одной силой — главным вектором системы. Образующуюся систему пар сил можно заменить одной эквивалентной парой — главным моментом системы.
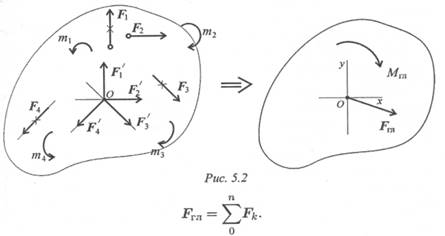
Главный вектор равен геометрической сумме векторов произвольной плоской системы сил. Проецируем все силы системы на оси координат и, сложив соответствующие проекции на оси, получим проекции главного вектора.

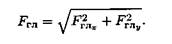
По величине проекций главного вектора на оси координат находим модуль главного вектора:
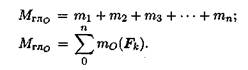
Главный момент системы сил равен алгебраической сумме моментов сил системы относительно точки приведения.
Таким образом, произвольная плоская система сил приводится к одной силе (главному вектору системы сил) и одному моменту (главному моменту системы сил).
Влияние точки приведения
Точка приведения выбрана произвольно. При изменении положения точки приведения величина главного вектора не изменится.
Величина главного момента при переносе точки приведения изменится, т. к. меняются расстояния от векторов-сил до новой точки приведения.
С помощью теоремы Вариньона о моменте равнодействующей можно определить точку на плоскости, относительно которой главный момент равен нулю. Тогда произвольная плоская система сил может быть заменена одной силой.
Эту силу называют равнодействующей системы сил.
Численно равнодействующая равна главному вектору системы сил, но приложена в другой точке, относительно которой главный момент равен нулю. Равнодействующую принято обозначать FΣ .
Численно ее значение определяется так же, как главный вектор системы сил:
Точку приложения равнодействующей можно определить по формуле

где d — расстояние от выбранной точки приведения до точки приложения равнодействующей;
Тема 1.4. Плоская система произвольно расположенных сил 37
Мгл — величина главного момента относительно выбранной точки приведения;
Fгл — величина главного вектора системы сил.
Силу можно перенести параллельно линии ее действия, при этом нужно добавить пару сил с моментом, равным произведению модуля силы на расстояние, на которое перенесена сила.
Дано: сила в точке А (рис. 5.1).
Добавим в точке В уравновешенную систему сил (F 1 ; F"). Образуется пара сил (F; F"). Получим силу в точке В и момент пары т.
Приведение к точке плоской системы
произвольно расположенных сил
Линии действия произвольной системы сил не пересекаются в одной точке, поэтому для оценки состояния тела такую систему следует упростить
Тема 1.4. Плоская система произвольно расположенных сил 35
Для этого все силы системы переносят в одну произвольно выбранную точку — точку приведения. Применяют теорему Пуансо. При любом переносе силы в точку, не лежащую на линии ее действия, добавляют пару сил.
Появившиеся при переносе пары называют присоединенными парами.
Дана плоская система произвольно расположенных сил (рис. 5.2).
Переносим все силы в точку О. Получим пучок сил в точке О, который можно заменить одной силой — главным вектором системы. Образующуюся систему пар сил можно заменить одной эквивалентной парой — главным моментом системы.
Главный вектор равен геометрической сумме векторов произвольной плоской системы сил. Проецируем все силы системы на оси координат и, сложив соответствующие проекции на оси, получим проекции главного вектора.
По величине проекций главного вектора на оси координат находим модуль главного вектора:
Главный момент системы сил равен алгебраической сумме моментов сил системы относительно точки приведения.
Таким образом, произвольная плоская система сил приводится к одной силе (главному вектору системы сил) и одному моменту (главному моменту системы сил).
Влияние точки приведения
Точка приведения выбрана произвольно. При изменении положения точки приведения величина главного вектора не изменится.
Величина главного момента при переносе точки приведения изменится, т. к. меняются расстояния от векторов-сил до новой точки приведения.
С помощью теоремы Вариньона о моменте равнодействующей можно определить точку на плоскости, относительно которой главный момент равен нулю. Тогда произвольная плоская система сил может быть заменена одной силой.
Эту силу называют равнодействующей системы сил.
Численно равнодействующая равна главному вектору системы сил, но приложена в другой точке, относительно которой главный момент равен нулю. Равнодействующую принято обозначать FΣ .
Численно ее значение определяется так же, как главный вектор системы сил:
Точку приложения равнодействующей можно определить по формуле
где d — расстояние от выбранной точки приведения до точки приложения равнодействующей;
Тема 1.4. Плоская система произвольно расположенных сил 37
Мгл — величина главного момента относительно выбранной точки приведения;
Fгл — величина главного вектора системы сил.
Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций.


Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой.
Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим.
Теорема. Силу, приложенную к абсолютно твердому телу, можно, не изменяя оказываемого действия переносить параллельно самой себе в любую другую точку тела, прибавляя при этом пару сил с моментом, равным моменту переносимой силы, относительно точки, куда сила переносится.
Доказательство.
Пусть на тело действует сила приложенная в точке . Обозначим ее как . Выберем произвольную точку . В соответствие с аксиомой №2 к силе , приложенной в точке , можно добавлять уравновешенную систему сил , приложенную в точке . Поэтому перенесем в эту точку параллельно силе систему сил и (рис.С.27).

Из рисунка можно видеть, что действие силы , приложенной в точке эквивалентно действию той же силы , приложенной в точке и пары сил с моментом силы относительно точки .
Таком образом, силу, приложенную к точке , можно перенести параллельно себе в точку , добавляя при этом пару сил с моментом .
В дальнейшем, теорема о параллельном переносе и теорема об эквивалентности пар позволяют существенно упростить произвольную плоскую систему сил, сводя ее к двум векторам.
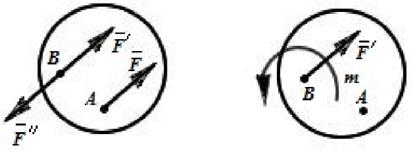
Пусть на тело действует сила , приложенная в точке А (рис.2.18).
Действие этой силы не изменится (согласно второй аксиоме статики), если в произвольной точке В тела приложить две уравновешенные силы и , такие, что , , причем обе силы параллельны . Полученная система трех сил и представляет собой силу равную , но приложенную в точке В, и пару ( , ), момент которой равен m = mB ( ).
Следовательно, силу, приложенную к абсолютно твёрдому телу, можно не изменяя оказываемого ею действия, переносить параллельно ей самой из данной точки в любую другую точку тела, прибавляя при этом пару с моментом, равным моменту переносимой силы относительно точки, куда эта сила переносится. Тогда , где , m=mB( ).
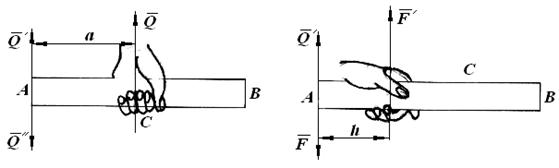
Пример. Чтобы удержать в равновесии однородный брус АВ длиной 2а и весом , надо приложить в его середине С направленную вверх силу , по модулю равную (рис. 2.19).
Пусть на тело действует сила , приложенная в точке А (рис.2.18).
Действие этой силы не изменится (согласно второй аксиоме статики), если в произвольной точке В тела приложить две уравновешенные силы и , такие, что , , причем обе силы параллельны . Полученная система трех сил и представляет собой силу равную , но приложенную в точке В, и пару ( , ), момент которой равен m = mB ( ).
Следовательно, силу, приложенную к абсолютно твёрдому телу, можно не изменяя оказываемого ею действия, переносить параллельно ей самой из данной точки в любую другую точку тела, прибавляя при этом пару с моментом, равным моменту переносимой силы относительно точки, куда эта сила переносится. Тогда , где , m=mB( ).
Пример. Чтобы удержать в равновесии однородный брус АВ длиной 2а и весом , надо приложить в его середине С направленную вверх силу , по модулю равную (рис. 2.19).
Читайте также: