
Привязка пунктов геодезических сетей и способы их отыскания кратко
Обновлено: 04.07.2024
2) осуществлять контроль и выдерживать необходимую точность выполняемых геодезических работ.
Такой способ привязки к плановой опорной сети, когда прибор устанавливается на опорном пункте, называется способом непосредственного примыкания к опорным пунктам. Однако он не всегда возможен и не всегда целесообразен. Если опорные пункты удалены от участка строительства на значительное расстояние, либо измерения углов и линий на участках подхода к опорному пункту сильно затруднены, то выгоднее выполнить привязку прямой либо обратной засечками.
Для определения положения точки обратной засечкой из этой точки должно быть видно не менее трех опорных пунктов.
Прямую и обратную засечки вычисляют по особым формулам.
Кроме описанных возможны и иные способы привязки к опорной плановой сети. В частности, когда опорный пункт располагается значительно выше поверхности земли, например на крыше здания, решают задачу по снесению координат с вершины знака на землю.
Привязка к пунктам полигонометрии типа стенных реперов имеет свои особенности.
1) Изображение рельефа на планах и картах
Для решения инженерных задач изображение рельефа должно обеспечивать: во-первых, быстрое определение с требуемой точностью высот точек местности, направления крутизны скатов и уклонов линий; во-вторых, наглядное отображение действительного ландшафта местности.
Рельеф местности на планах и картах изображают различными способами (штриховкой, пунктиром, цветной пластикой), но чаще всего с помощью горизонталей (изогипсов), числовых отметок и условных знаков.
Горизонталь на местности можно представить как след, образованный пересечением уровенной поверхности с физической поверхностью Земли. Например, если представить холм, окружённый неподвижной водой, то береговая линия воды и есть горизонталь (рис. 30). Лежащие на ней точки имеют одинаковую высоту.
Допустим, что высота уровня воды относительно уровенной поверхности 110 м (рис. 30). Предположим теперь, что уровень воды упал на 5 м и часть холма обнажилась. Кривая линия пересечения поверхностей воды и холма будет соответствовать горизонтали с высотой 105 м. Если последовательно снижать уровень воды по 5 м и проектировать кривые линии, образованные пересечением поверхности воды с земной поверхностью, на горизонтальную плоскость в уменьшенном виде, то получим изображение рельефа местности горизонталями на плоскости.
Таким образом кривая линия, соединяющая все точки местности с равными отметками, называется горизонталью.При решении ряда инженерных задач необходимо знать свойства горизонталей:
1. Все точки местности, лежащие на горизонтали, имеют равные отметки.
2. Горизонтали не могут пересекаться на плане, поскольку они лежат на разных высотах. Исключения возможны в горных районах, когда горизонталями изображают нависший утес.
3. Горизонтали являются непрерывными линиями. Горизонтали, прерванные у рамки плана, замыкаются за пределами плана.
4. Разность высот смежных горизонталей называется высотой сечения рельефа и обозначается буквой h.
Высота сечения рельефа в пределах плана или карты строго постоянна. Её выбор зависит от характера рельефа, масштаба и назначения карты или плана. Для определения высоты сечения рельефа иногда пользуются формулой
h = 0,2 мм · М,
где М – знаменатель масштаба.
Такая высота сечения рельефа называется нормальной.
5. Расстояние между соседними горизонталями на плане или карте называется заложением ската или склона. Заложение есть любое расстояние между соседними горизонталями (см. рис. 30), оно характеризует крутизну ската местности и обозначается d.
Вертикальный угол, образованный направлением ската с плоскостью горизонта и выраженный в угловой мере, называется углом наклона ската ν (рис. 31). Чем больше угол наклона, тем круче скат.
Рис. 31. Определение уклона и угла наклона ската
Другой характеристикой крутизны служит уклон i. Уклоном линии местности называют отношение превышения к горизонтальному проложению. Из формулы следует (рис. 31), что уклон безразмерная величина. Его выражают в сотых долях (%) или тысячных долях – промиллях (‰).
Если угол наклона ската до 45°, то он изображается горизонталями, если его крутизна более 45°, то рельеф обозначают специальными знаками. Например, обрыв показывается на планах и картах соответствующим условным знаком (рис. 32).
Для изображения рельефа горизонталями выполняют топографическую съемку участка местности. По результатам съемки определяют координаты (две плановые и высоту) для характерных точек рельефа и наносят их на план (рис. 33). В зависимости от характера рельефа, масштаба и назначения плана выбирают высоту сечения рельефа h.
Для инженерного проектирования обычно h = 1 м. Отметки горизонталей в этом случае будут кратны одному метру.
Положение горизонталей на плане или карте определяется с помощью интерполирования. На рис. 33 приведено построение горизонталей с отметками 51, 52, 53, 54, 55, 56, 57 м. Горизонтали кратные 5 или 10 м проводят на чертеже утолщенными и подписывают. Подписи наносят таким образом, чтобы верх цифр указывал сторону повышения рельефа. На рис. 33 подписана горизонталь с отметкой 55 м.
Там, где заложения больше, наносят штриховые линии (полугоризонтали). Иногда, чтобы сделать чертеж более наглядным, горизонтали сопровождают небольшими черточками, которые ставятся перпендикулярно горизонталям, по направлению ската (в сторону стока воды). Эти черточки называются бергштрихи.
2)Способы съемки ситуации
Съемка ситуации – геодезические измерения на местности для последующего нанесения на план ситуации (контуров и предметов местности).
Выбор способа съемки зависит от характера и вида снимаемого объекта, рельефа местности и масштаба, в котором должен быть составлен план .
Съемку ситуации производят следующими способами: перпендикуляров; полярным; угловых засечек; линейных засечек; створов (рис. 60).
Способы съемки ситуации:
1) способ перпендикуляров;
2) полярный способ;
3) способ угловых засечек;
4) способ линейных засечек;
5) способ створов.
Рис. 60. Способы съемки ситуации:
а – перпендикуляров, б – полярный, в – угловых засечек, г – линейных засечек, д – створов.
Способ перпендикуляров (способ прямоугольных координат) – применяется обычно при съемке вытянутых в длину контуров, расположенных вдоль и вблизи линий теодолитного хода, проложенных по границе снимаемого участка. Из характерной точки К (рис. 60, а) опускают на линию хода А – В перпендикуляр, длину которого S2измеряют рулеткой. Расстояние S1 от начала линии хода до основания перпендикуляра отсчитывают по ленте.
Полярный способ (способ полярных координат) – состоит в том, что одну из станций теодолитного хода (рис.60, б) принимают за полюс, например, станцию А, а положение точки К определяют расстоянием S от полюса до данной точки и полярным углом β между направлением на точку и линией А – В. Полярный угол измеряют теодолитом, а расстояние дальномером. Для упрощения получения углов, теодолит ориентируют по стороне хода.
Приспособе засечек (биполярных координат) положение точек местности определяют относительно пунктов съемочного обоснования путем измерения углов β1 и β2(рис.60, в) – угловая засечка, или расстояний S1 и S2 (рис.60, г) – линейная засечка.
Угловую засечку применяют для съемки удаленных или труднодоступных объектов.
Линейную засечку – для съемки объектов, расположенных вблизи пунктов съемочного обоснования. При этом необходимо чтобы угол γ, который получают между направлениями при засечке был не менее 30° и не более 150°.
Способ створов (промеров). Этим способом определяют плановое положение точек лентой или рулеткой.(рис. 60, д). Способ створов применяется при съемке точек, расположенных в створе опорных линий, либо в створе линий, опирающихся на стороны теодолитного хода. Способ применяется при видимости крайних точек линии. Результат съемки контуров заносят в абрис. Абрис называют схематический чертеж, который составляется четко и аккуратно.
1) Уклон линии – это отношение превышения конца отрезка над его началом к горизонтальному проложению
График заложений по уклонам
График строится по формуле ,
где h – константа для данной карты; i – задается. Подставляя в формулу, получим = 1000 м, что на карте масштаба 1:10 000 составляет 10 см.
Так как съемку местности часто проводят через большой промежуток времени после построения геодезической сети, за это время могут исчезнуть наружные знаки пунктов и измениться земной покров над их центрами. Для того чтобы в таких случаях было легче найти местоположение этих пунктов, при закладке центров их привязывают к местным предметам или к пунктам триангуляции. Различают привязку к близким предметам и далеким.
Привязку пунктов к близким предметам выполняют чаще всего промерами. Например, полигонометрический пункт Р находится вблизи здания, рис. 6. Для его привязки к зданию надо опустить на сторону AD здания перпендикуляр РК= а, измерить его длину и расстояния АК = b, KD = c, АР = d, DP= е.

Рисунок 6. Привязка пункта к близким предметам
Избыточные измерения обеспечивают контроль определения положения пункта Р. Для восстановления направления стороны PQ хода, следует измерить угол = NPQ, где N— удаленный ориентир, а для контроля угола = DPQ. По этим данным нетрудно восстановить положение пункта Р и направление стороны PQ.
Привязку пункта Р к удаленным пунктам триангуляции А, В и С, имеющим координаты, можно осуществить обратной засечкой, измерив углы 1 и 2 (Рис. 7).

Рисунок 7. Привязка пункта обратной засечкой
При отыскании пункта Р устанавливают теодолит в точке М, предполагая, что она находится вблизи точки Р, измеряют углы 1 и 2 (рис. 8).

Рисунок.8. Схема разыскания пункта обратной засечкой
Затем решают задачу Потенота. Получив координаты точки М, вычисляют дирекционные углы направлений (МА) и (MP), а также расстояние MP [дирекционный угол направления (МА) может получиться при решении задачи Потенота]. Затем вычисляют угол = (МА) — (MP). Построив при точке М угол и отложив длину отрезка MP, находят положение пункта Р.
11.4. Современное состояние и структура государственной геодезической сети
Современное состояние государственной геодезической сети, ее структура и основные принципы развития определены в Основных положениях о государственной геодезической сети 2000 г. Согласно Положениям она включает в себя астрономо-геодезическую сеть (АГС) — 164 306 пунктов, геодезические сети сгущения (ГСС) — около 300 тыс. пунктов. Кроме того, она включает независимые спутниковые геодезические сети: космическую геодезическую сеть (КГС) — 26 пунктов и доплеровскую геодезическую сеть (ДГС) — 131 пункт.
ГГС охватывает как территорию современной России, так и территории других стран, ранее входивших в состав СССР.
Единая государственная система геодезических координат 1995 г. (СК—95) для использования в геодезических и картографических работах Российской Федерации начиная с 1 июля 2002 г.;
Единая государственная геоцентрическая система координат (ПЗ—90) для геодезического обеспечения орбитальных полетов и решения навигационных задач.
В результате введения СК—95 повышается точность, оперативность и экономическая эффективность решения задач геодезического обеспечения экономики, науки и обороны государства на уровне современных требований.
Новая единая система государственных координат СК—95 в стране введена взамен действовавшей с 1946 г. единой системы государственных геодезических координат 1942 г.
СК—95 была получена по результатам двух этапов уравнивания:
В 1995 г. после совместного уравнивания АГС, ДГС и КГС была определена сеть из 134 пунктов со средним расстоянием между смежными пунктами 400. 500 км;
В 1996 г. при заключительном уравнивании АГС определенная на первом этапе уравнивания была использована в качестве жесткой основы.
СК—95 строго согласована с единой государственной геоцентрической системой координат ПЗ—90 (Параметры Земли 1990 г.), которая закреплена на местности пунктами космической геодезической, сети.
Высоты квазигеоида над референц-эллипсоидом Красовского определены методом астрономо-гравиметрического нивелирования. Сеть линий астрономо-гравиметрического нивелирования, покрывает всю территорию страны и образует 909 замкнутых полигонов, включающих 2897 астрономических пунктов.
Основными положениями предусмотрено создать новую структуру государственной геодезической сети в виде:
фундаментальной астрономо-геодезической сети (ФАГС);
высокоточной геодезической сети (ВГС);
спутниковой геодезической сети I класса (СГС-1);
астрономо-геодезической сети (АГС);
геодезической сети сгущения (ГСС).
Высшее звено всей структуры координатного обеспечения территории страны — фундаментальная астрономо-геодезическая сеть. Она служит исходной геодезической основой для дальнейшего повышения точности государственной геодезической сети на территории страны. ФАГС практически реализует общеземную геоцентрическую систему координат в рамках координатно-вре-менного обеспечения (КВО) страны. Фундаментальная астрономо-геодезичеекая сеть состоит из постоянно действующих и периодически определяемых пунктов. Среднее расстояние между пунктами ФАГС — 800. 1000 км. Все пункты должны быть фундаментально закреплены.
Пространственное положение пунктов ФАГС определяют методами космической геодезии в общеземной системе координат с погрешностью положения относительно центра масс не более (2. 3)10 -8 R (где R —радиус Земли) при погрешности взаимного положений пунктов ФАГС не более 2 см по плановому положению и З см по высоте. На всех пунктах определяют нормальные высоты и абсолютные силы тяжести.
Основными функциями высокоточной геодезической сети (ВГС) являются распространение на всю территорию страны общеземной геоцентрической системы координат и определение точных параметров взаимного ориентирования общеземной геоцентрической и государственной референцной систем геодезических координат. ВГС наряду с ФАГС является основой для спутниковых геодезических сетей и для построения высокоточных карт высот квазигеоида с использованием гравиметрической информации и данных нивелирования. ВГС представляет собой опирающееся на пункты ФАГС, однородное по точности пространственное геодезическое построение, состоящее из системы пунктов, удаленных один от другого на 150. 300 км.
Пункты ВГС определяют относительными методами космической геодезии. Они обеспечивают точность взаимного положения со средними квадратическими погрешностями не более 3 мм + 5 10 -8 D (где D — расстояние, мм) по каждой из плановых координат и 5 мм + 7 10 -8 D по геодезической высоте. Каждый пункт ВГС должен быть связан измерениями со смежными пунктами ВГС и не менее чем с тремя пунктами ФАГС.
В результате создания СГС-1 обеспечены оптимальные условия для реализации точностных и оперативных возможностей спутниковой аппаратуры при переводе геодезического обеспечения территории России на спутниковые методы определения координат пунктов. СГС-1 будет являться пространственным геодезическим построением, состоящим из системы легко доступных пунктов с плотностью, достаточной для обеспечения координатных определений пунктов с погрешностью не более 5 мм относительно любых близкорасположенных пунктов АГС, СГС-1, ВГС. СГС-1 будет создаваться относительными методами космической геодезии при средних расстояниях между пунктами: 15. 20 км в районах с интенсивной хозяйственной деятельностью; 25. 35 при средней плотности сети; 40. 50 км в необжитых районах, кроме сейсмически активных.
Так как съемку местности часто проводят через большой промежуток времени после построения геодезической сети, за это время могут исчезнуть наружные знаки пунктов и измениться to мной покров над их центрами. Для того чтобы в таких случаях было легче найти местоположение этих пунктов, при закладке центров их привязывают к местным предметам или к пунктам триангуляции. Различают привязку к близким предметам и далеким.

Привязку пунктов к близким предметам выполняют чаще всего промерами. Например, полигонометрический пункт Р находится вблизи здания (рис. 10.11). Для его привязки к зданию надо опустить на сторону AD здания перпендикуляр РК= а, измерить его длину и расстояния АК= b, KD=c, AP= d, DP= е. Избыточно измеренные величины обеспечат контроль определения положения пункта Р.
Для восстановления направления стороны PQ хода следует измерить угол = NPQ, где N— удаленный ориентир, а для контроля — угол = DPQ. По этим данным нетрудно восстановить положение пункта Р и направление стороны PQ.
Привязку пункта Р к удаленным пунктам триангуляции А, В и С, имеющим координаты, можно осуществить обратной засечкой, измерив углы и (рис. 10.12). При отыскании пункта P уста
навливают теодолит в точке М, предполагая, что она находится
вблизи точки Р, измеряют углы и (рис. 10.13). Затем решают задачу Потенота. Получив координаты точки М, вычисляют дирекционные углы направлений (МА) и (MP), а также расстояние MP [дирекционный угол направления (МА) может получиться при решении задачи Потенота]. Затем вычисляют угол = (МА) — (MP). Построив при точке М угол и отложив длину отрезка MP, находят положение пункта Р. Восстановление направления стороны PQ в этом случае может быть проведено таким же способом, как рассмотрено ранее.

Контрольные вопросы и задания
1. Дайте понятие геодезической сети. 2. Каковы статус, значение и классификация государственной геодезической сети? 3. Каковы статус, значение и классификация государственной сети сгущения и съемочных сетей? 4. Объясните статус, значение и классификацию опорных межевых сетей.
Глава 19
ГЛОБАЛЬНАЯ СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ
19.1. Общие сведения. Историческая справка. Принцип работы системы и ее достоинства
В конце XX века в геодезии нашли распространение принципиально новые методы и средства измерений, базирующиеся на использовании искусственных спутников Земли (ИСЗ), получивших название спутниковое позиционирование.
Спутниковое позиционирование — определение местоположения (координат пункта или движущегося объекта) при помощи спутниковых навигационно-геодезических систем (СНГС). Это направление получило широкое применение в различных областях человеческой деятельности.
Координаты пунктов (объектов) нужны не только геодезистам, но и морякам, авиаторам, военным, участникам различных экспедиций и многим другим потребителям. Если раньше для создания геодезической основы приходилось строить дорогостоящие сети различных конфигураций, закрепляемые на местности специальными центрами с наружными знаками (пирамидами, сигналами) для обеспечения взаимной видимости между пунктами, то появление спутниковых систем сделало эти работы ненужными. С помощью только одного спутникового приемника возможно определить координаты объекта с метровой точностью, что достаточно не только для навигационных, но и в ряде случаев для земельно-кадастровых, геологических, мелиоративных и других работ. Применяя два приемника, можно получить сантиметровую и даже миллиметровую точность взаимного положения пунктов, что обеспечивает решение практически всех геодезических задач.
Спутниковое позиционирование базируется на электронных методах геодезических измерений, в первую очередь на электронной дальнометрии, которые широко применяют в наземной геодезии. В случае спутниковых измерений эти методы претерпели существенные изменения, обусловленные спецификой прохождения сигналов на космических трассах.
К первому поколению спутниковых систем позиционирования до 70-х годов можно отнести Транзит (США) и Цикада (СССР). В 1984—1993 гг. в России с помощью системы Транзит создана доплеровская геодезическая сеть (ДГС).
Применяя глобальные системы, получают координаты в любой точке Земли в любой момент времени с сантиметровой точностью. Это стало возможным благодаря увеличению высот орбит спутников до 20 тыс. км и числа самих спутников до 24. Приемники спутниковых сигналов созданы с применением высоких технологий, поэтому они малы по размерам и сравнительно недороги. Все это позволяет рассматривать глобальные системы как новое достояние цивилизации.
В мире существуют две глобальные системы: американская — GPS и российская — ГЛОНАСС.
GPS (Global Positioning System — Глобальную Систему Позиционирования) первоначально называли NAVSTAR (1973). Система находится в ведении Министерства обороны США. Запуск спутников первого блока осуществлен в 1978 г. Эксплуатируется с 1995 г. До недавнего времени система была открыта для гражданского пользования только в режиме пониженной точности; для режима высокой точности требовался санкционированный доступ. В 2000 г. это ограничение снято, и сейчас GPS открыта для всех и в режиме высокой точности.
В 1999 г. Европейский парламент поддержал решение Европейского космического агентства ESA о создании нового поколения спутниковой системы GALILEO, которая будет включать 30 спутников (из них 3 резервных), расположенных на высоте 23 200 км и вращающихся в трех орбитальных плоскостях, наклоненных на 56° к плоскости экватора. Таким образом, с учетом спутников GPS и ГЛОНАСС в распоряжении пользователей будет 80 космических аппаратов (КА), покрывающих весь земной шар.
В 1989 г. начали создание Европейской системы координат EUREF, которая базируется на методе GPS и опирается на основные спутниковые станции, задающие всемирную систему координат ITRF. На территории 15 стран было заложено 92 пункта с таким расчетом, чтобы в каждой стране было не менее трех пунктов сгущения. Расстояния между пунктами составили 300. 500 км. По результатам уравнивания точность системы оценена на уровне З. 4см.
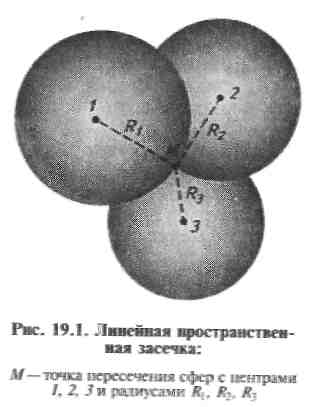
Принцип работы глобальной системы состоит в том, что приемники GPS-сигналов на Земле используют спутники в качестве исходных (опорных) пунктов для определения своего местоположения. Это известная в геодезии пространственная обратная линейная засечка, когда на пересечении трех сферических поверхностей (рис. 19.1) определяют координаты искомого пункта. Измеряя время прохождения сигнала от спутника до приемника, можно определить расстояние до спутника. По трем измеренным дальностям Д (/= 1, 2, 3) координаты определяемой точки х, у, z получают из решения трех уравнений (уравнений сферы) вида

При применении изложенного геометрического принципа определения местоположения к глобальным спутниковым системам возникают две особенности. Одна из них состоит в том, что исходными пунктами (пунктами с известными координатами) являются движущиеся спутники, а определяемыми (неподвижными или движущимися) — пункты (спутниковые приемники), находящиеся на Земле. Другая особенность работы системы состоит в том, что вследствие несинхронности хода часов на спутнике и в пшемнике
(об этом будет сказано далее) измеряемые дальности: получаются искаженными, поэтому их называют псевдодальностями. Для правильного вычисления координат приемника по измеренным псевдодальностям их надо измерять не до трех, а минимум до четырех спутников.
Для получения избыточных измерений, которые могут повысить качество окончательного результата и оценить его точность, обычно используют большее число спутников.
Рассмотрим систему GPS (рис. 19.2) как получившую более широкое применение в геодезии.

результаты получаются в системе общего земного эллипсоида;
обеспечивается полная автоматизация измерений и обработки результатов;
исключается необходимость располагать пункты под условием обеспечения взаимной видимости между ними;
представляется возможным выполнять наблюдения в любую погоду, как в дневное, так и в ночное время;
выбирать пункты можно, исходя из требований съемки, в непосредственной близости к району работ, без учета конфигурации геодезической сети;
выполнять полевые работы можно с помощью аппаратуры, не требующей персонала высокой квалификации;
время наблюдений на пункте, как правило, не превышает 1 . 2 ч, а когда не требуется высокая точность измерений, может быть уменьшено до 1. 2мин;
представляется возможность высокоточного определения координат центров проектирования при аэро- и космической съемке;
одновременная, видимость нескольких спутников позволяет исключать основные источники- погрешностей в спутниковых наблюдениях, в результате чего достижима точность определения относительных координат 1*10 -6 и более, что означает возможность конкуренции с наземными методами измерений.
19.2. ПРИНЦИП ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ ПРИЕМНИКА ДО СПУТНИКА. ПСЕВДОДАЛЬНОСТЬ
Принцип измерения расстояния от приемника до спутника аналогичен принципу измерения линий наземными свето- и радиодальномерами, изложенному в главе 13. Основной измеряемой величиной в этих дальномерах является время , затрачиваемое сигналом на прохождение удвоенного расстояния (в прямом и обратном направлениях). Если скорость распространения такого сигнала с известна, то измеряемое расстояние определяют по формуле
В этом методе, называемом двусторонним, время излучения и приема сигнала регистрируют по одним и тем же часам, поэтому проблемы синхронизации часов не возникает.
В спутниковых технологиях находят применение односторонние (беззапросные) методы дальномерных измерений, основная особенность которых состоит в том, что передающее устройство размешают на спутнике, а приемное — на наземном пункте. При этом сигнал проходит измеряемое расстояние только в одном направлении — от спутника до приемника. Если в этом случае момент излучения и момент приема сигнала зафиксированы точно синхронизированными часами, расположенными на спутнике и на наземном пункте, то измеряемое расстояние может быть определено по формуле, аналогичной (19.2),
где — время прохождения сигналом расстояния от приемника до спутника.
Еще раз подчеркнем, что для этой цели часы на спутнике и в приемнике должны идти абсолютно синхронно. На самом деле этого не наблюдается. Поэтому между показаниями этих часов в каждый момент времени имеет место ненулевая разность — Эта величина искажает результаты определения дальности. По этой причине полученную изложенным методом дальность, как уже упоминалось ранее, называют псевдодальностью.
Для установления связи псевдодальности Р с геометрической дальностью р обратимся к формуле (19.3). Подставив в нее вместо истинного времени фактически измеряемое + , получим выражение для псевдодальности

где с — скорость распространения сигнала в вакууме; р = а — геометрическая дальность; c — некоторая линейная величина, отличающая истинную дальность от псевдодальности.
Вследствие того что сигнал от спутника проходит путь не в вакууме, а в атмосфере, возникает задержка сигнала в атмосфере = - вак (здесь вак — время распространения сигнала в вакууме) и, как следствие, атмосферная поправка c amм.
С учетом атмосферной поправки с атм и величины с окончательно выражение для псевдодальности будет иметь вид

19.3. СОСТАВ ГЛОБАЛЬНОЙ СИСТЕМЫ. РЕЖИМ РАБОТЫ СИСТЕМЫ
Глобальная система состоит из трех секторов: космического, наземного контроля и управления и потребителя (рис. 19.4).
Космический сектор. Он представляет собой созвездие из 24 спутников, обращающихся вокруг Земли в шести орбитальных плоскостях (по четыре спутника на каждой орбите (см. рис. 19.2). Такое число спутников обеспечивает видимость над горизонтом по меньшей мере четырех спутников (минимально необходимое число для определения координат наземного приемника) в любой точке Земли в любое время суток.
Точки пересечения орбиты с небесным экватором размещены равномерно по экватору, т. е. отстоят друг от друга на 60°. Орбиты наклонены относительно плоскости экватора на 55°. Период обращения спутника вокруг Земли равен примерно 12 ч, следовательно, спутники делают два оборота вокруг Земли в сутки. Такой период обращения обеспечивает прохождение каждого спутника над областью, контролируемой наземными системами управления США, по крайней мере раз в сутки. Постоянный контроль орбит спутников с Земли обеспечивает необходимую точность системы. Любое замеченное отклонение движения спутника от теоретической орбиты измеряется и передается на борт ИСЗ в память компьютера.
Процедура определения координат пунктов основана на использовании кодовой информации и высокоточных временных сигналов, передаваемых спутниками. Каждый спутник GPS передает сигналы на двух несущих частотах: L1 = 1575,42 МГц (длина волны 19,см) и L2 = 1227,60 МГц (длина волны 24 см).

Рис. 19.4. Общая структура глобальных спутниковых систем:
I—космический сектор; II—сектор управления и контроля; III—сектор пользователя; 1—станция слежения; 2— центр управления; 3— станция загрузки; 4— приемная антенна; 5— спутниковый приемник; 6— комплекс обработки измерений

Точный Р-код обеспечивает выполнение спутниковых определений с дециметровой точностью, а грубый С/А-код — с метровой точностью.
Наибольшую точность получают при определении относительных координат между двумя и более приемниками дифференциальным методом. Трехмерный вектор между двумя станциями, на которых были организованы одновременные сбор и обработка данных GPS этим методом, называют базовой линией или просто базой.
Все спутниковые системы обеспечивают определение координат приемника (базы между парой приемников) в общеземной геоцентрической системе координат. Для того чтобы связать определяемые при помощи GPS координаты с местной системой координат, должны быть установлены параметры преобразования одной системы в другую. Подробно это рассмотрено далее.

Сектор пользователя. Он состоит из приемника и вычислительного блока. Приемник принимает сигналы, поступаю щие от спутника, и передает их в вычислительный блок. Вычислительный блок обрабатывает данные измерений и навигационных сообщений, поступивших из приемника, т. е. выполняет так называемую постобработку.
Режим работы систем. Глобальные системы могут работать в двух основных режимах, получивших название кодовых и фазовых измерений (рис. 19.6). При кодовых измерениях измеряют время распространения
кодово-модулированного сигнала от спутника до приемника, а при фазовых — сдвиг фазы колебаний несущей частоты за время распространения. Режим кодовых измерений называют навигационным, абсолютными определениями, а режим фазовых измерений — геодезическим, относительными определениями. Такую терминологию используют потому, что кодовые измерения дают меньшую точность, приемлемую главным образом для решения задач навигации, и при этом обеспечивают непосредственное получение самих координат (абсолютных значений). Фазовые же измерения позволяют получить не сами координаты, а разности (приращения) одноименных координат двух (или более) точек, в которых установлены одновременно работающие приемники.
Иногда выделяют третий режим — интегральный доплеровский счет, который позволяет получить скорость изменения расстояния до спутника и фиксировать моменты последовательных положений спутника.
Теодолитные ходы обычно прокладывают между исходными (опорными) пунктами государственной геодезической сети или сетей сгущения. Координаты опорных пунктов (X и Y) определены в общегосударственной системе координат. Поэтому привязка теодолитного хода производится для определения координат точек хода и дирекционных углов его сторон в единой общегосударственной системе.
Плановая привязка теодолитного хода заключается в измерении горизонтальных углов и длин сторон от исходных пунктов к точкам теодолитного хода. Рассмотрим способы привязки замкнутого и разомкнутого теодолитных ходов.
1 Привязка замкнутого теодолитного хода.Она может быть выполнена от двух пунктов (А и В) опорной геодезической сети или от одного пункта (А). Для привязки к двум пунктам от ближайшей точки замкнутого теодолитного хода прокладывают дополнительный (привязочный) теодолитный ход (1 – 7 – А) (рисунок 9.2), в котором измеряют правые по ходу углы β0, β7, βА и длины сторон 1 – 7 и 7 – А. Углы β0 и βА в привязочном ходе называют п р и м ы ч н ы м и. По дирекционному углу опорной стороны АВ вычисляют дирекционные углы привязочного хода (см. рисунок 9.2):
 |
Рисунок 9.2 – Привязка теодолитного хода
Зная координаты опорного пункта А, по длинам сторон привязочного хода и дирекционным углам вычисляют координаты начальной точки основного теодолитного хода (точка 1), используя формулы прямой геодезической задачи. Для рисунка 9.2 будем иметь:
Таким образом, координаты начальной точки (X1, Y1) будут получены в общегосударственной системе координат. Если известен только один опорный пункт, например пункт А на рисунке 9.2, на нем измеряют магнитный азимут стороны А – 7. По магнитному азимуту вычисляют дирекционный угол стороны А – 7:
где Ам – магнитный азимут стороны А – 7, измеряемый теодолитом с помощью ориентир-буссоли;
δ – магнитное склонение;
γ – сближение меридианов.
Значения величин магнитного склонения и сближения меридианов узнают на ближайшей метеостанции.
Дальнейшие действия по привязке к одному исходному пункту А ведут аналогично привязке замкнутого хода к двум исходным пунктам, описанным выше.
2 Привязка разомкнутого теодолитного хода.Разомкнутый теодолитный ход привязывают к опорным пунктам в начале и в конце хода. На рисунке 9.3 начальная А и конечная В точки являются опорными пунктами геодезической сети. Дирекционные углы αнач и αкон называются и с х о д н ы м и. Углы β0 и βn, измеренные в точках А и В, называют п р и м ы ч н ы м и.

Рисунок 9.3 – Привязка разомкнутого теодолитного хода
Для определения координат точки 1 разомкнутого хода вычисляют вначале дирекционный угол αА, 1 (см. рисунок 9.3):
Затем, используя формулы прямой геодезической задачи, определяют координаты точки 1:
Таким образом, координаты точки 1 разомкнутого теодолитного хода будут определены в общегосударственной системе координат. Разомкнутый теодолитный ход при изысканиях называют м а г и с т р а л ь н ы м х о д о м.
Иногда опорные пункты государственной геодезической сети могут быть удалены от точек теодолитного хода на 3–10 км. В этом случае используют способы привязки хода к отдаленным пунктам опорной сети, которые называют прямой и обратной угловой засечкой. Формулы для привязки точек теодолитного хода этими способами рассмотрены в п. 9.6.
Теодолитные ходы обычно прокладывают между исходными (опорными) пунктами государственной геодезической сети или сетей сгущения. Координаты опорных пунктов (X и Y) определены в общегосударственной системе координат. Поэтому привязка теодолитного хода производится для определения координат точек хода и дирекционных углов его сторон в единой общегосударственной системе.
Плановая привязка теодолитного хода заключается в измерении горизонтальных углов и длин сторон от исходных пунктов к точкам теодолитного хода. Рассмотрим способы привязки замкнутого и разомкнутого теодолитных ходов.

1 Привязка замкнутого теодолитного хода.Она может быть выполнена от двух пунктов (А и В) опорной геодезической сети или от одного пункта (А). Для привязки к двум пунктам от ближайшей точки замкнутого теодолитного хода прокладывают дополнительный (привязочный) теодолитный ход (1 – 7 – А) (рисунок 9.2), в котором измеряют правые по ходу углы β0, β7, βА и длины сторон 1 – 7 и 7 – А. Углы β0 и βА в привязочном ходе называют п р и м ы ч н ы м и. По дирекционному углу опорной стороны АВ вычисляют дирекционные углы привязочного хода (см. рисунок 9.2):
| |
Рисунок 9.2 – Привязка теодолитного хода
Зная координаты опорного пункта А, по длинам сторон привязочного хода и дирекционным углам вычисляют координаты начальной точки основного теодолитного хода (точка 1), используя формулы прямой геодезической задачи. Для рисунка 9.2 будем иметь:
Таким образом, координаты начальной точки (X1, Y1) будут получены в общегосударственной системе координат. Если известен только один опорный пункт, например пункт А на рисунке 9.2, на нем измеряют магнитный азимут стороны А – 7. По магнитному азимуту вычисляют дирекционный угол стороны А – 7:
где Ам – магнитный азимут стороны А – 7, измеряемый теодолитом с помощью ориентир-буссоли;
δ – магнитное склонение;
γ – сближение меридианов.
Значения величин магнитного склонения и сближения меридианов узнают на ближайшей метеостанции.
Дальнейшие действия по привязке к одному исходному пункту А ведут аналогично привязке замкнутого хода к двум исходным пунктам, описанным выше.
2 Привязка разомкнутого теодолитного хода.Разомкнутый теодолитный ход привязывают к опорным пунктам в начале и в конце хода. На рисунке 9.3 начальная А и конечная В точки являются опорными пунктами геодезической сети. Дирекционные углы αнач и αкон называются и с х о д н ы м и. Углы β0 и βn, измеренные в точках А и В, называют п р и м ы ч н ы м и.
Рисунок 9.3 – Привязка разомкнутого теодолитного хода
Для определения координат точки 1 разомкнутого хода вычисляют вначале дирекционный угол αА, 1 (см. рисунок 9.3):
Затем, используя формулы прямой геодезической задачи, определяют координаты точки 1:
Таким образом, координаты точки 1 разомкнутого теодолитного хода будут определены в общегосударственной системе координат. Разомкнутый теодолитный ход при изысканиях называют м а г и с т р а л ь н ы м х о д о м.
Иногда опорные пункты государственной геодезической сети могут быть удалены от точек теодолитного хода на 3–10 км. В этом случае используют способы привязки хода к отдаленным пунктам опорной сети, которые называют прямой и обратной угловой засечкой. Формулы для привязки точек теодолитного хода этими способами рассмотрены в п. 9.6.
Читайте также: