
Объясните конструкцию короткозамкнутого и фазного роторов кратко
Обновлено: 05.07.2024
В статье рассмотрим, почему наиболее популярен именно асинхронный двигатель в исполнении с короткозамкнутым ротором. Изучим положительные и отрицательные качества конструкции. Также расскажем о распространенных поломках и способах их выявления.
Современное электроснабжение осуществляется посредством сетей переменного тока. Оборудование и электроприборы производятся в соответствующем исполнении. К ним можно отнести и асинхронные трехфазные двигатели. Есть несколько разновидностей таких моторов, однако наиболее широко применяется вариация с короткозамкнутым ротором (обычая или реверсивная), о которой и пойдет речь в данной статье. Причина такой популярности в простоте конструкции и малой себестоимости производства.
Конструктивные особенности
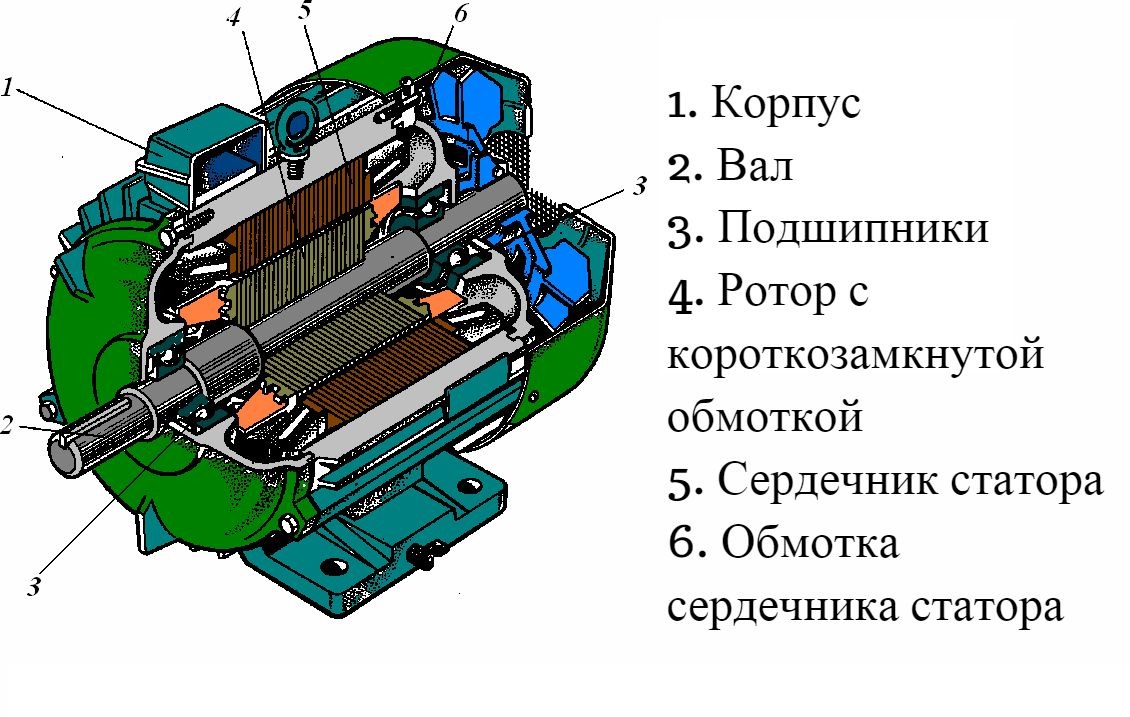
Основными элементами электродвигателя любого назначения являются статор и ротор. Для защиты от контактов с окружающими объектами система с обмотками закрывается в прочный кожух. Предотвратить перегрев обмоток позволяет дополнение в виде установленного на роторном валу охлаждающего вентилятора.

Статор асинхронного трехфазного двигателя с короткозамкнутым ротором имеет стандартное для электродвигателей строение. Исполнение, рассчитанное на работы с обмотками на три фазы, подразумевает расположение сердечников под углом в 120 о . Обмотки выполняют из медной проволоки подходящего сечения, изолированной. Подключение обмоток производится в звезду или треугольник (оно описано в отдельных статьях). Статорный магнитопровод жестко фиксируют к стенкам корпуса.
Роторная часть имеет внешний вид, похожий на небольшую цилиндрическую клетку. Парные кольца исполняют роль короткозамыкающего элемента для стержней, изготовленных из алюминия. Если рассматривать конструкцию высокой мощности, для нее стержневые части конструкции могут изготавливаться из меди. Причиной использования данного материала служит его низкое сопротивление. Однако есть и минусы – медь для обмотки стоит дороже алюминия и быстрее плавится при нагреве сердечника вихревыми токами.
Расположение стержней при сборке выполняется поверх сердечников из специальной трансформаторной стали. Монтаж производят на валу агрегата, провод обмотки впрессовывается в специальные пазы магнитопровода. Простота изготовления повышается тем, что в таком исполнении для магнитопроводных пластин не требуется изоляция. Это – один из главных факторов, сделавших асинхронный агрегат короткозамкнутого типа самым популярным (его доля в общей массе электромоторов достигает 90%).
Разновидности по количеству фаз

В зависимости от исполнения и способа подключения конструкции для короткозамкнутого вида делят на 3 типа, каждый из которых имеет свои особенности:
- Однофазные. Применяется единственная рабочая обмотка. Запуск производится посредством катушки индуктивности, на короткий период подключаемой к сети через конденсатор. Также возможен вариант короткого замыкания. Конструкция рассчитана на малую мощность, и широко применяется в бытовых приборах.
- Двухфазные. Статорная конструкция использует 2 обмотки, расположенные перпендикулярно относительно друг друга. Подача переменного напряжения при этом производится на каждую из них. Основное направление применения – однофазные сети. Для корректной работы в таких условиях напрямую к фазе подключается только одна из обмоток. Вторая запитывается посредством фазосдвигающего конденсатора. Данный элемент является обязательным, поскольку без его добавления в схему вращение вала не начнется. В силу такой особенности двухфазные асинхронные двигатели иногда называют конденсаторными.
- Трехфазные. Конструкция подразумевает 3 обмотки. Могут производиться с разными системами пуска, однако в любой конструкции отличаются повышенной стабильностью работы при номинальной нагрузке. Имеют самые высокие пусковые характеристики.
Количество и расположение обмоток выбирают в зависимости от типа сети и уровня нагрузок, которые придутся на мотор.
Различия между короткозамкнутым и фазным ротором
Система такого мотора построена на основе трех обмоток статора, формирующих разное количество магнитных полюсов (в зависимости от конструкции, выбранной в процессе проектирования). Объем полюсов на обмотках оказывает влияние на номинальный режим работы. Роторная система же может быть выполнена в 2 вариантах – короткозамкнутом и фазном.
Короткозамкнутый ротор
При помещении в движущееся магнитное поле статора, замкнутый виток проводника начнет индуцировать ЭДС, вследствие чего будет вырабатываться ток. Из-за этого замкнутый контур начинает подвергаться воздействию сил Ампера, поворачиваясь в том же направлении, что и у магнитных полей статора.
В этом заключается основной принцип работы короткозамкнутого электродвигателя. Вместо замкнутого контура в конструкции применяется набор стержней из меди или алюминия, замкнутых накоротко кольцами. Переменное напряжение при прохождении по статорным обмоткам создает вращающееся магнитное поле. На замкнутых контурах роторной конструкции появляется ток, и вся система приходит в движение. Вращение происходит за счет разной величины индуцируемого тока на парах стержней, что постоянно меняется в зависимости от расположения парных элементов относительно магнитного поля.
Фазный ротор

Асинхронные модели с фазным ротором конструктивно имеют полноценную обмотку. В роторной конструкции предусмотрены специальные пазы, в которых укладываются провода. Выводы от обмотки подключены к контактным кольцам, которые расположены на валу. При этом поверхности данных элементов изолированы друг от друга и от вала. Конструкция обмотки составлена 3 частями, каждая из которых отвечает за отдельную фазу. Наиболее распространенным способом подключения является звезда. Фазные системы более сложны, чем короткозамкнутые и имеют большую себестоимость. Однако они предоставляют больше возможностей по регулировке рабочего момента на валу.
Статорная обмотка в фазном электродвигателе представляет собой аналог ротора на короткозамкнутой конструкции. Она создает разное количество парных полюсов, объем которых зависит от набора катушек, сдвинутых относительно друг друга на определенную величину (120 о , 60 о , 40 о и т.д.). Регулировка рабочего момента осуществляется посредством управления напряжением на обмотках.
Скольжение S
Параметр скольжения есть во всех асинхронных силовых агрегатах. Возникает данное явление из-за разницы в частоте вращения магнитного поля статора и ротора. Индуцируемая в стержнях ЭДС может появляться только при их движении относительно магнитного поля. Ротор при этом немного отстает.
Если скорости вращения одинаковы, в стержнях клетки не индуцируется ток, что делает невозможным дальнейшее движение. Поэтому в любом исполнении и рабочей нагрузке ротор движется с немного меньшей скоростью, чем магнитное поле.
Измерение скольжения производится в процентах. На холостом ходу данный показатель стремится к 0. При застопоренном роторе (КЗ) параметр равен 1. В асинхронной системе с короткозамкнутым ротором параметр скольжения зависит от нагрузки.
Пусковой ток
Прямой пуск мотора характеризуется значительно большим уровнем тока, чем при его стабильной работе. Пусковой показатель может превышать номинал в 5-8 раз. При этом номинальный ток всегда указывается производителем на шильдике двигателя, тогда как пусковой описан только в технической документации. В характеристиках этот параметр указан как отношение пускового тока к номинальному.
Как вычислить пусковое напряжение?

Есть несколько способов произвести расчет пускового тока для асинхронного двигателя. Эти варианты пригодятся в том случае, если величина соотношения не указана в технической документации или сопровождающие бумаги были утеряны:
- Осциллограф. Проверка показаний производится в момент пуска посредством резисторного шунта. Действующее напряжение вычисляют из максимального амплитудного значения, после чего, используя закон Ома, определяют пусковой ток. Преимущество такого способа в получении конкретных данных по определенному двигателю.
- Пониженное напряжение. В таком варианте на двигатель подается сниженное в 5-10 раз напряжение и производится замер. После пересчета получается пусковой ток. Причем замеры достаточно произвести для 1 фазы. На остальных пусковые показатели должны быть аналогичными. Данный способ применяется на производстве для получения данных, отображаемых в таблице. Основанием служит номинальный ток, поэтому в каждом отдельном случае пусковой показатель может быть другим.
- Токоизмерительные клещи. Простой и быстрый метод. Наиболее точные показания получаются при замере на системах с длительным пуском и высокой инерцией. Например, это могут быть вентиляторы или двигатели с массивной крыльчаткой.
- Трансформатор. Способ, применяемый в узлах учета электроэнергии. Используя трансформатор, не нужно измерять реальный ток, достаточно получить его величину, уменьшенную в определенное количество раз. Существенным минусом метода является то, что трансформатор рассчитан на частотный диапазон в 50-60 Гц, тогда как пусковые переходные процессы могут иметь более широкий спектр и гармоники.
Важно помнить, что, в силу определенных факторов, заявленный производителем пусковой ток будет иметь большую кратность, чем его реальное значение.
Как уменьшить напряжение при пуске асинхронного мотора

Большое пусковое усилие часто становится проблемой, вызывая перегрузки питающей сети, перегрев, ускоренный износ двигателя. Поэтому необходимо иметь возможность понизить его величину для сохранения работоспособности и долговечности систем. Есть несколько способов:
- Плавный пуск. В таком варианте на двигатель подается сначала пониженное напряжение с постепенным повышением до номинала. Для реализации метода используются УПП (устройства плавного пуска) или частотные преобразователи.
- Ограничители. В таком исполнении в качестве ограничивающего элемента при пуске применяются резисторы с высокими показателями сопротивления. После срабатывания таймера производится переключение двигателя на номинальное значение. Для сборки такого пускового устройства достаточно использовать контактор и реле времени, поэтому сделать его можно самостоятельно.
- Звезда-треугольник. Особый способ подключения обмоток, который позволяет сразу использовать полное напряжение на прямой пуск и реверс, однако выводить магнитное поле двигателя на номинальную мощность постепенно. Такой подход помогает сохранить рабочие характеристики агрегата. Чертеж подобного подключения можно найти в интернете.
Есть также варианты запуска и раскручивания асинхронного реверсивного двигателя вхолостую. Нагрузка подключается только после достижения достаточных оборотов. В таком исполнении могут применяться вариаторы, муфты, коробки передач. При необходимости реализовать быструю остановку, можно использовать динамическое торможение, для чего на обмотки статора подается постоянное напряжение.
Преимущества и недостатки короткозамкнутой разновидности
Высокая популярность и широкое распространение таких конструкций электродвигателя обусловлено его преимуществами:
- высокая стабильность работы при номинальной нагрузке;
- надежность и долговечность;
- простое обслуживание асинхронного мотора, низкие затраты на эксплуатацию;
- малая стоимость относительно других моделей;
- высокие показатели КПД двигателя.
При правильной эксплуатации такой агрегат прослужит долгое время, не требуя частого обслуживания.
Однако есть у системы и свои недостатки:
- высокий пусковой уровень напряжения;
- низкий коэффициент скольжения;
- повышенная реакция на перепады напряжения;
- необходимость применения дополнительного оборудования для безопасного пуска асинхронного агрегата (УПП, частотники);
- потребность во внешних управляющих узлах для регулировки скорости вращения.
Несмотря на свои недостатки, агрегаты асинхронного типа с короткозамкнутым ротором являются наиболее практичными и популярными в производстве и быту.
Возможные неисправности

Несмотря на простоту и надежность асинхронного двигателя, при неправильной эксплуатации и неблагоприятных внешних условиях они могут потерять рабочие характеристики или выйти из строя. Любые неисправности мелкого или серьезного характера можно разделить на 2 группы – электрические и механические.
Механические поломки
Эти повреждения часто заметны при внешнем осмотре или на слух в процессе работы электродвигателя:
- дефекты корпуса, крыльчатки;
- ослабленная фиксация обмоток;
- деформация вала.
Также частой проблемой является износ подшипников. Для своевременного выявления поломки необходимо проявлять внимание к внешним признакам. Изношенные элементы способствуют появлению вибраций, перегреву агрегата. Также определить неисправность можно акустическим способом – по повышению уровня шума при включении питания.
Электрические неполадки
Среди поломок электрического происхождения чаще всего проявляются:
- межвитковые замыкания;
- повреждение обмотки;
- пробой изоляции на корпус;
- потеря сопротивления изолирующего материала, повреждение его целостности;
- износ щеток в процессе длительной работы;
- поломка контактных колец.
Для выявления таких проблем понадобится произвести замеры с помощью мультиметра и мегаомметра.
Проводя исследование асинхронного двигателя с короткозамкнутого исполнения измерительными приборами, можно проверить целостность обмоток, наличие всех фаз, уровень поступающего в него напряжения.

С помощью мегаомметра производится замер уровня сопротивления изоляции обмоток. Данный прибор выполняет измерение в условиях подачи повышенного напряжения. При снижении показателя ниже нормы (оно должно быть не ниже 0,5 МОм) необходимо принимать меры. Если он не равен нулю, можно поставить агрегат на просушку. Для этого вместо роторной части внутрь корпуса вставляют мощную лампу накаливания. Если после просушки обмоток показатель сопротивления не повысился, поломка определяется как короткое замыкание. Выявить его точное место можно при помощи омметра, по очереди, замерив сопротивление всех обмоток. Различия между показаниями для обмоток должны быть минимальными, допустимая разница – не больше 2%.
При правильном использовании и постоянном контроле исправности, не придется часто проводить исследование асинхронного агрегата с короткозамкнутого типа на предмет повреждений и выполнять ремонт. Конструкция отличается высокой надежностью и способна долгое время работать без существенного технического обслуживания. Это, в свою очередь, снижает общие эксплуатационные затраты. С учетом низкой общей себестоимости (относительно других вариаций), оно делает электродвигатели с ротором короткозамкнутого типа наиболее практичными и простыми для использования.

Широкое распространение асинхронного электродвигателя (АД) вызвано его надежностью и простотой конструкции. Статор такого двигателя стандартный, представляет собой изготовленный из пластин электростатической стали полый цилиндр с трехфазной обмоткой. Ротор же может быть короткозамкнутым и фазным. Последний вариант получил более широкое распространение по ряду причин, хотя его конструкция намного сложнее, чем у короткозамкнутого ротора.
Конструкция фазного ротора
Фазный ротор АД конструктивно напоминает его статор. Основа ротора набирается из пластин электростатической стали, которые насаживаются на вал. Конструкция имеет продольные пазы, в которые укладываются витки катушек фазной обмотки. Количество фаз ротора строго соответствует количеству фаз статора. Для подключения обмотки ротора к цепи, на валу последнего устанавливаются 3 контактных кольца, к которым подведены концы обмотки, находящиеся в соприкосновении с токопроводящими щетками. В свою очередь щетки имеют выходы в коробку корпуса, что позволят подключать внешнее дополнительное сопротивление.
В зависимости от напряжения сети, фазы обмотки соединяются “треугольником” или “звездой”. Оси катушек двухполюсного электродвигателя смещены на 120 градусов относительно друг друга.
Контактные кольца изготавливаются из латуни или стали. На вал они посажены с обязательной изоляцией между собой. Щетки расположены на щеткодержатле, изготовлены из металлографита, к кольцам прижимаются посредством пружин.
Зачем нужно добавочное сопротивление?
Добавочное сопротивление служит для запуска двигателя с нагрузкой на его валу. Как только достигаются номинальные обороты вала, сопротивление отключается за ненадобность, а кольца закорачиваются. В противном случае работа электродвигателя будет нестабильной, возникнут потери КПД.
Роль добавочного внешнего сопротивления, как правило, выполняет ступенчатый реостат. В этом случае двигатель будет разгонятся тоже ступенчато. Часто используются устройства, способные поднять КПД двигателя, при этом избавляя щетки от излишнего трения о кольца. После разгона устройство поднимает щетки и замыкает кольца.
Для реализации автоматического пуска электродвигателя используется подключенная индуктивность к обмотке ротора. Дело в том, что в тот момент, когда осуществляется пуск, в роторе показатели индуктивности и частоты тока максимальны. При разгоне двигателя эти показатели падают, а в конечном итоге двигатель выходит на нормальный рабочий режим.
Отличие короткозамкнутого ротора от фазного
В короткозамкнутом роторе электродвигателя, в отличие от фазного варианта, нет обмоток. Их заменяют замкнутые с торцов между собой кольцами стержни, изготовленные из алюминия или меди. Визуально конструкция такого ротора напоминает беличье колесо, от чего он и получил свое название - “беличья клетка”.
Короткозамкнутый ротор приводится во вращение за счет наведения тока магнитным полем статора. Чтобы исключить пульсирование магнитного поля в роторе, стержни “беличьей клетки” располагаются параллельно между собой, но под наклоном относительно оси вращения. АД с короткозамкнутым ротором обладают высокой надежностью за счет отсутствия щеток, которые со временем перетираются. Кроме того, их стоимость меньше, чем у вариантов с фазным ротором.
Преимущества и недостатки электродвигателя с фазным ротором
Широкое распространение АД с фазным ротором получил за счет ряда серьезных преимуществ перед другими машинами подобного рода. Среди них следует отметить большой вращающий момент при запуске, а также относительно постоянную скорость вращения даже при высоких нагрузках. Такие электродвигатели для запуска требуют меньший пусковой ток, а конструкция позволяет использовать автоматические пусковые устройства. Кроме того, эти электрические машины хорошо переносят продолжительные перегрузки.
Как и любой электрический механизм, электродвигатели с фазным ротором имеют ряд недостатков:
- Чувствительность к перепадам напряжения;
- Большие габаритные размеры
- Высокая стоимость;;
- Более сложная конструкция за счет цепи ротора с добавочным сопротивлением;
- Меньшие показатели коэффициента мощности и КПД (относительно АД с короткозамкнутым ротором).
Область применения электродвигателей с фазным ротором
Ад с фазным ротором, за счет высокого крутящего момента, низких пусковых токов и способности долговременно работать при повышенных нагрузках, используются там, где необходима большая мощность электродвигателя, но нет необходимости плавно регулировать скорость вращения в широких диапазонах. Кроме того, эти машины отлично приспособлены под пуск с нагрузкой на валу.
За счет высокой производительности, наиболее часто АД с фазным ротором используются на различном серьезном, тяжелом силовом оборудовании, например, подъемных кранах, лифтовых приводах, станках, различных подъемниках. Иными словами, эти двигатели используются там, где есть необходимость запуска под нагрузкой, а не на холостом ходу.
Проверка электродвигателя с фазным ротором
Как известно, электродвигатели с фазным ротором имеют обмотки как на статоре, так и на роторе, что повышает вероятность выхода из строя именно одной из них.
Для проверки обмоток статора трехфазного АД на целостность, необходимо добраться до клемм их подключения. Затем нужно произвести замеры сопротивлений между фазными клеммами по отдельности, предварительно сняв перемычки. Если сопротивление какой-либо обмотки меньше, чем у других, это свидетельствует о замыкании между ее витками. В этом случае двигатель отдается на перемотку.
Для проверки обмоток ротора, необходимо отыскать выводы от контактных колец. Затем нужно убедиться, что сопротивления обмоток совпадают. Если конструкция электродвигателя предусматривает наличие системы отключения обмоток ротора, отсутствие контакта может быть обусловлено именно поломкой данного механизма, а не обрывом витков.
О наличие какой-либо неисправности АД могут свидетельствовать следующие факторы:
- Снижение скорости вращения при нагрузке. Характерно для высокого сопротивления в цепи ротора, слабого контакта в его обмотке, низкого напряжения электросети
- Разворачивание АД, когда цепь ротора разомкнута – КЗ в обмотке ротора
- Чрезмерное равномерное повышение температуры двигателя – длительная перегрузка АД или его недостаточное охлаждение
- Нагрев статорной обмотки местного характера – двойное замыкание катушек статора на корпус или между фазами, КЗ между витками, неверное подключение катушек в фазе между собой
- Нагрев стали статора местного характера – нарушение изоляции между листами стали, их оплавление и выгорание, замыкание
- Посторонний шум при работе АД. Может быть вызван как выходом из строя подшипников, так и недостаточной запрессовкой активной стали. Определяется на слух по характеру постороннего шума
- Перегорание в обмотке якоря предохранителей, отсутствие контакта в подводящей проводке, выход из строя реостата
Для самостоятельной диагностики и исправления неисправностей электродвигателя необходимыми являются хотя-бы минимальные познания в устройстве АД и электрических цепях в целом. Все же крайне не рекомендуется самостоятельно заниматься ремонтом электродвигателя с фазным ротором, так как это может привести к поражению электрическим током.
Устройство и принцип работы асинхронного двигателя с фазным ротором и с короткозамкнутым ротором в целом похожи, основные отличия лежат в конструкции этого самого ротора, схеме подключения и принципе запуска.
Устройство и принцип работы
Основные элементы асинхронной машины — это статор и ротор. Статор – это неподвижный элемент электрической машины, который состоит из сердечника с обмоткой. В статор помещается вращающийся ротор — вал, на котором расположен сердечник с короткозамкнутой (у АД с КЗ-ротором) или изолированной обмоткой (у АД с фазным ротором).
Так как магнитный поток в асинхронном двигателе переменный, сердечник статора изготавливается шихтованными, то есть он состоит из набора тонких пластин, которые изолируются друг от друга окалиной и покрываются лаком. Это нужно для снижения вихревых токов и потерь.
В сердечнике есть пазы, в которые укладывается трёхфазная обмотка. А сам сердечник запрессовывается в литую станину – корпус двигателя.
Обмотка статора – состоит из катушек, намотанных медным проводником и расположенных в статоре так, что их геометрические оси сдвинуты в пространстве друг относительно друга на 120 градусов, как и фазы в трёхфазной системе питания. Обмотки статора соединяются по схеме звезды или треугольника.
На фазном роторе размещены три изолированные обмотки, соединённые по схеме звезды. Сердечник ротора также, как и статора набирается из штампованных листов электротехнической стали. Свободные концы обмоток выведены к контактным кольцам. Для съёма тока с колец используются щётки, закреплённые на щёткодержателях.
Принцип действия асинхронного двигателя с фазным ротором такой же, как и у двигателя с короткозамкнутым ротором — вращающееся магнитное поле статора пересекая проводники обмотки ротора индуктирует в них ЭДС. Если обмотка ротора замкнута, то ЭДС порождает электрический ток. В результате взаимодействия этого тока с магнитным полем статора возникает электромагнитный момент и ротор начинает вращаться.
Частота вращения магнитного поля или синхронная частота n1 рассчитывается по формуле:
где f – частота питающей сети, а p – число пар полюсов обмотки статора. У двигателя с одной парой полюсов она равна 3000 об/мин.
Частота вращения ротора n2 немного ниже, и её можно посчитать по формуле:
n2=n1*(1-S )=(f1×60/p)(1-s), где n1 – синхронная частота, S – скольжение.
Скольжение S – это величина, которая выражает разницу между частотой вращения вала и частотой вращения магнитного поля статора у асинхронного двигателя, рассчитывается по формуле:
Величина скольжения у разных двигателей отличается, зачастую указывается на шильдике и обычно лежит в пределах 2-8%.
Итак, частота вращения ротора любого АД определяется скольжением, частотой питающей сети и числом пар полюсов в обмотке статора.
Начнём с конца — изменить число полюсов в обмотке односкоростного двигателя в процессе работы не получится — для этого есть многоскоростные двигатели, у которых изначально обмотка рассчитана на переключения.
Для изменения частоты тока используют частотные преобразователи. Раньше они не были слишком распространены из-за высокой стоимости, но в последнее время используются всё чаще и всё в большем количестве задач.
Изменять скольжение для регулировки частоты вращения АД можно:
- Изменением питающего напряжения, подводимого к обмотке статора.
- Нарушением симметрии питающего напряжения.
- Изменением активного сопротивления обмотки ротора.
Регулировка частоты вращения двигателя изменением скольжения возможно только для нагруженного двигателя. То есть на холостом ходу его вал всё равно будет вращаться со скоростью близкой к номинальной.
Величину питающего напряжения обычно изменяют с помощью регулировочных автотрансформаторов или включают реакторы в разрыв линейных проводов (последовательно с обмоткой статора), такой способ используется с асинхронными двигателями с короткозамкнутым ротором.
Изменение скольжения за счёт изменения активного сопротивления обмотки ротора возможно только на асинхронных двигателях с фазным ротором, как отмечалось выше, к кольцам ротора подключаются, через щётки, резисторы или реостат. При движении бегунка реостата изменяется его сопротивление, так как реостат подключён к обмотке ротора, то при этом изменяется активное сопротивление в цепи ротора.
При увеличении активного сопротивления обмотки ротора увеличивается скольжение, соответствующее заданному нагрузочному моменту. Говоря простым языком – при одной и той же нагрузке на двигатель, при увеличении скольжения будут уменьшаться обороты ротора. По той же причине при увеличении активного сопротивления ротора увеличивается и пусковой момент.
Рисунок 5 — Влияние активного сопротивления обмотки ротора на механическую характеристику асинхронного двигателя
Рисунок 5 — Влияние активного сопротивления обмотки ротора на механическую характеристику асинхронного двигателя
Зависимость скольжения от сопротивления определяется по формуле:
Предлагаю не вдаваться в подробности и не рассматривать эти вопросы глубже, чтобы не увеличивать объём статьи, а просто запомнить – чем больше активное сопротивление обмоток – тем меньше обороты ротора при той же нагрузке. Давайте перейдём к практике, а именно рассмотрим схему подключения.
Схема подключения
Разбирать схему включения асинхронного двигателя с фазным ротором будем на примере схемы плавного пуска.
Рисунок 6 — Схема запуска асинхронного двигателя с фазным ротором с выведением резисторов по задержке времени
Рисунок 6 — Схема запуска асинхронного двигателя с фазным ротором с выведением резисторов по задержке времени
Схему условно можно разделить на 2 цепи – силовую и управления. Силовая цепь состоит из автоматического выключателя QF , контактора КМ1, теплового реле КК, включённого в разрыв питающего двигатель кабеля и самого двигателя. Контактор КМ1 подаёт напряжение на обмотку статора. Контакторы КМ2, КМ3 и КМ4 шунтируют (выводят из цепи) резисторы, соединённые с обмоткой ротора. Резисторы, кстати, соединяются тоже по схеме звезды.
Цепь управления состоит из катушки контактора двигателя КМ1, подключённой по стандартной схеме с самоподхватом через нормально замкнутый контакт теплового реле КК. И цепи управления контакторами резисторов КМ2, КМ3 и КМ4, реле времени КТ1, КТ2 и КТ3. При срабатывании теплового реле, контакт КК разомкнётся и отключит контактор КМ1 и все цепи обесточатся – и двигатель, и цепь управления.
При включении автомата QF напряжение через нормально замкнутую кнопку SB2 (СТОП) поступает на нормально разомкнутую кнопку SB1 (ПУСК). При нажатии на кнопку SB1 напряжение подаётся на контактор катушку контактора КМ1, в результате чего нормально разомкнутые контакты КМ1.1, КМ1.2.
КМ1.1 запитает цепь из реле времени КТ1, КТ2, КТ3 и контакторов управляющих резисторами в цепи ротора КМ2, КМ3, КМ4.
КМ1.2 замкнётся и будет удерживать контактор КМ1 во включённом состоянии – это называют самоподхватом, когда контактор удерживается во включенном состоянии за счет того, что катушка питается через контакт этого же самого контактора.
Реле времени КТ1, КТ2 и КТ3 настроены на определённую задержку времени, через которую они будут включаться. Время задержки настраиваться для каждого конкретного случая, в зависимости от режима запуска и работы двигателя, нагрузки на его валу. Поэтому опустим конкретные цифры, просто примем, что эти реле включаются одно за другим.
По истечении времени задержки КТ1 включится и включит контактор КМ2, тем самым выведет из цепи первую цепочку сопротивлений. Активное сопротивление ротора уменьшится, уменьшиться и его скольжение, а значит обороты станут больше при том же моменте.
Двигатель продолжит разворачиваться и по истечении времени задержки КТ2 сработает, включит КМ3 и выведет из цепи ротора следующую цепочку резисторов, сопротивление ротора уменьшится ещё больше, вал начнёт вращаться ещё быстрее и так далее. Такой процесс будет повторяться столько раз, сколько ступеней резисторов подключено к ротору, что вы и можете видеть на следующей анимации.
Наука в области электричества в XIX и XX веках стремительно развивалась, что привело к созданию электрических асинхронных двигателей. С помощью таких устройств развитие промышленной индустрии шагнуло далеко вперед и теперь невозможно представить заводы и фабрики без силовых машин с использованием асинхронных электродвигателей.

История появления
История создания асинхронного электродвигателя начинается в 1888 году, когда Никола Тесла запатентовал схему электродвигателя, в этом же году другой ученый в области электротехники Галлилео Феррарис опубликовал статью о теоретических аспектах работы асинхронной машины.
В 1889 году российский физик Михаил Осипович Доливо-Добровольский получил в Германии патент на асинхронный трехфазный электрический двигатель.

Все эти изобретения позволили усовершенствовать электрические машины и привели к тому, что в промышленность стали массово применяться электрические машины, которые значительно ускорили все технологические процессы на производстве, повысили эффективность работы и снизили её трудоемкость.
В настоящий момент самый распространенный электродвигатель, эксплуатируемый в промышленности, является прототипом электрической машины, созданной Доливо-Добровольским.
Устройство и принцип действия асинхронного двигателя
Главными компонентами асинхронного электродвигателя являются статор и ротор, которые отделены друг от друга воздушным зазором. Активную работу в двигателе выполняют обмотки и сердечник ротора.
Под асинхронностью двигателя понимают отличие частоты вращения ротора от частоты вращения электромагнитного поля.

Ротор – это подвижная часть двигателя. Роторы асинхронных электродвигателей бывают двух видов: с короткозамкнутым и фазным роторами. Данные виды отличаются между собой конструкциями обмотки ротора.
Асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с фазным ротором

Принцип действия
При подаче электрического тока на обмотки статора возникает магнитный поток. Так как фазы смещены относительно друг друга на 120 градусов, то из-за этого поток в обмотках вращается. Если ротор короткозамкнутый, то при таком вращении в роторе появляется ток, который создает электромагнитное поле. Взаимодействуя друг с другом, магнитные поля ротора и статора заставляют ротор электродвигателя вращаться. В случае, если ротор фазный, то напряжение подается на статор и ротор одновременно, в каждом механизме появляется магнитное поле, они взаимодействуют друг с другом и вращают ротор.
Достоинства асинхронных электродвигателей
| С короткозамкнутым ротором | С фазным ротором |
|---|---|
| 1. Простое устройство и схема запуска | 1. Небольшой пусковой ток |
| 2. Низкая цена изготовления | 2. Возможность регулировать скорость вращения |
| 3. С увеличением нагрузки скорость вала не меняется | 3. Работа с небольшими перегрузками без изменения частоты вращения |
| 4. Способен переносить перегрузки краткие по времени | 4. Можно применять автоматический пуск |
| 5. Надежен и долговечен в эксплуатации | 5. Имеет большой вращающий момент |
| 6. Подходит для любых условий работы | |
| 7. Имеет высокий коэффициент полезного действия |
Недостатки асинхронных электродвигателей
| С короткозамкнутым ротором | С фазным ротором |
|---|---|
| 1. Не регулируется скорость вращения ротора | 1. Большие габариты |
| 2. Маленький пусковой момент | 2. Коэффициент полезного действия ниже |
| 3. Высокий пусковой ток | 3. Частое обслуживание из-за износа щеток |
| 4. Некоторая сложность конструкции и наличие движущихся контактов |
Асинхронные электродвигатели являются очень эффективными устройствами с отличными механическими характеристиками, и благодаря этому они являются лидерами по частоте применения.
Режимы работы

Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим — основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
Читайте также: