
Критерий идеального наблюдателя кратко
Обновлено: 01.06.2024
Критерий МП иногда называется критерием минимума потерь информации, так как оптимальное правило решения в этом случае устанавливает границу подпространства (рис.1.2) так, чтобы уменьшить вероятность искажения того сигнала, вероятность передачи которого меньше (следовательно, этот сигнал содержит больше информации).
Критерий МП применяется в системах связи также в тех случаях, когда априорные вероятности Р(S1)и P(S2)неизвестны.
3. Критерий идеального наблюдателя.
Если весовые коэффициенты П12 = П21=1, то критерий минимального среднего риска минимизирует среднюю вероятность ошибки
pош = P(S1)P(y2/S1) + P(S2)P(y1/S2) (2.4)
и называется критерием идеального наблюдателя.
Критерий идеального наблюдателя широко применяется в системах связи, когда искажения любого сигнала одинаково нежелательны и совпадает с критерием МП, если вероятности Р(S1) = P(S2) = 0,5.
4. Критерий Неймана-Пирсона.
В некоторых системах передачи информации (системах радиолокации, некоторых системах сигнализации) имеется необходимость фиксирования (задания) одной из условных вероятностей Р(у1/S2)илиР(у2/S1).При этом оптимальный приемник принимает решение таким образом, чтобы минимизировать ту условную вероятность, которая не задана. Критерий оптимальности, который используется таким приемником называетсякритерием Неймана-Пирсона.
Например, задана вероятность пропуска сигнала S1, то естьР(у2/S1) = ..Тогда критерий Неймана-Пирсона требует минимизации условной вероятностиР(у1/S2),обеспечивая заданное значение. ВероятностьР(у1/S2)обычно обозначается ,тогда (1-) = Р(у2/S2)называется качеством решения.Правило решения Неймана-Пирсона обеспечивает(min ) илимах(1- )при = const.
Приемник при использовании критерия Неймана-Пирсона строится таким образом, чтобы получить достаточно малую вероятность пропуска cигнала(цели ) Р(у2/S1)=..С тем, что при этом может (несмотря на минимизацию=Р(у1/S2)) оказаться много ложных тревог, приходится мириться. В этом и заключается сущность данного критерия.
3. Отношение правдоподобия
Различение сигналов в приемном устройстве обычно осуществляют путем установления некоторого "порога" на выходе приемника, фактически играющего роль "границы подпространств" сигналов S1 иS2 .
На рис. 3.1. приведен некоторый дискретный сигнал х(t)(импульсы постоянного тока), на который накладывается флюктуационная помеха и проведена пунктирная линия, соответствующая выбранному порогухп.
Если величина x(t) xп ,приемник выдает сигнал S2. Как видно из рисунка, на отрезке времениt1, t2под действием сильной помехи величина х > xп, т. е. в этом случае приемник может выдать сигналS2 , хотя передавалсяS1.

Различные критерии приема дискретных сигналов фактически отличаются способом установления величины порога. Данная задача проще всего решается с помощью "отношения правдоподобия". Для рассмотрения этого вопроса обратимся к рис. 3. 2.
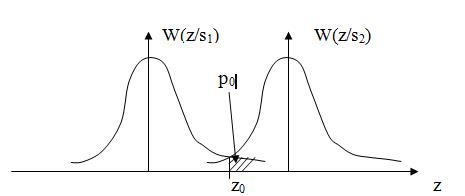
Если бы на входе приемника отсутствовали помехи, мы имели бы дело с "чистыми" сигналами S1 иS2 и задача разделения сигналов была бы очень проста. При наличии же помех сигналы искажаются и для их описания приходится использовать вероятностное пространство. Сами сигналы вместе с помехами описываются уже функциями плотности вероятности w(x/S1)и w(x/S2), которые изображены на рис. 3.2. (эти функции умножены также на весовые коэффициентыП12Р(S1)иП21Р(S2)).На этом же рисунке показан порог хп.
Заштрихованная часть рисунка левее хп имеет площадь, равную

П21Р(S2)w(x/S2)dx = П21Р(S2)P(x/S2), (3.1)
а заштрихованная часть правее хпимеет площадь, равную

П12Р(S1)w(x/S1)dx = П12Р(S1)P(x/S1), (3.2)
Сумма этих величин, в соответствии с формулой (2.1), есть средний рискRср. Из рис. 3.2. видно, чтоRсрбудет минимальным, когда минимальна суммарная площадь под кривыми. Это будет в том случае, если величинахп соответствует точке пересечения кривых на рис. 3.2. Следовательно, условием полученияminср> является такой порогхп,при котором наступает равенство ординат приведенных кривых, т. е.
П12Р(S1)w(x/S1)dx = П21Р(S2)w(x/S2), (3.3)
откуда получаем следующее соотношение:

. (3.4)
Стоящее слева выражение называется отношением правдоподобия

(х) = ,(3.5)
а w(x/S i),которая представляет собой плотность вероятности того, что принятый сигнал х образовался при передаче сигнала Si , обычно называетсяфункцией правдоподобия (функцией правдоподобия является также любая монотонная функция от w(x/Si),напримерlog[ w(x/Si)]).
Чем больше значение w(x/S i),тем более вероятно, чтохсодержит сигналSi(это очевидно из рис. 3.2). Справа стоящее выражение называетсяпороговым отношением правдоподобия

0 = . (3.6)
Приемник, использующий отношение правдоподобия, работает следующим образом.
1. Анализируя поступающий на его вход сигнал, вычисляет отношение правдоподобия (х).
2. По известным значениям априорных вероятностей Р(S1)иP(S2),а также заданным весовым коэффициентомП21и П12, вычисляется пороговое отношение правдоподобия 0.
3. Величина (х)сравнивается с0,
если (х) > 0, приемник выдает сигнал S1,
в противном случае сигнал S2 . (3.7)
Выражение (3.7) является правилом решения Ф(х)решающего устройства, показанного на рис.1.3.
Правило решения (3.7) является общим для двоичных систем связи, использующих любой критерий оптимального приема ; отличие только в значении порога 0 .
Если приемник работает по критерию минимального среднего риска, величина 0определяется формулой (3.6).
Для критерия идеального наблюдателя, в этой формуле коэффициенты
П12 = П21= 1 и тогда0 = P(S2)/ P(S1), (3.8)
Для критерия максимального правдоподобия
П12 = 1/ P(S1) , П21 = 1/ Р(S2), тогда 0 =1. (3.9)
Если приемник использует критерий Неймана-Пирсона, то отношение правдоподобия (х) становится случайной величиной, так как в равенстве (3.1) Р(у1/S2) =(задается потребителем). Пороговое отношение правдоподобия определяется как верхний предел интеграла

(3.10)
где w()- плотность распределения отношения правдоподобия (х).
Правило принятия решения приемником с использованием отношения правдоподобия рассмотрим на следующих примерах.
Условия задачи.
Пусть на вход приемника поступает аддитивная смесь сигнала (дискретная амплитудная модуляция) и помехи:

, где i=1,2;


n(t)флюктуационная помеха типа гауссовского шума с дисперсией.
На протяжении длительности одной элементарной посылки в решающей схеме приемника в синхронные моменты времени t1иt2произведено два отсчета(замера) сигналаx(t), причем t = t2-t1больше интервала корреляции помехиn(t). Измеренные значенияx(t1)=x1= 0,2 B; x(t2)=x2= 0,3B. Амплитуда сигнала A=0,4 B.
Определить отношение правдоподобия и принять решение по критерию идеального наблюдателя, какой из двух сигналов (S1или S2)поступил на вход приемника для двух случаев:

а);
б);.
Решение задачи(когерентный прием).
1. Найдем отношение правдоподобия .
Плотность вероятности сигнала x(t)=S1(t)+n(t)имеет вид

.
Так как на протяжении элементарного сигнала производятся два отсчета, то для нахождения отношения правдоподобия требуется найти двухмерную плотность вероятностей w2(x1x2/s1). Учитывая, что отсчеты некоррелированы (t больше интервала корреляции), а помеха распределена по гауссовскому закону, эти отсчеты можно считать независимыми. В этом случае двухмерная плотность вероятностей равна произведению одномерных плотностей

.

.

.
Подставляя численные значения A,n, x1, x2,получим: (0,2;0,3)= 2,7.
2.Применяем правило решения (3.7 ).
а) Пороговое отношение правдоподобия приP(s1)=P(s2)=0,5

.
В нашем случае (x1x2)=2,7 > 0=1 и приемник выдает сигнал S1.
б)Пороговое отношение правдоподобия приP(s1)=0,2 и P(s2)=0,8

.
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
Рассмотрим широко распространенный критерий Котельникова (идеального наблюдателя).
Будем называть критерием Котельникова такой критерий, согласно которому качество приемников (демодуляторов) оценивают величиной вероятности правильного приема символа (элемента сигнала).
Задание критерия необходимо для синтеза оптимального приемника.
Под синтезом будем понимать нахождение оптимальной в соответствии с некоторым критерием качества приема процедуры обработки наблюдаемого случайного процесса . Далее на этой основе создается устройство, которое реализует найденную процедуру обработки.
Итак, пусть на вход приемника (демодулятора) поступает аддитивная смесь сигнала и помехи: , на основе которой выносится решение о передаче символа . Это происходит после вычисления апостериорной вероятности , т.е. вероятности того, что действительно передавался символ при поступлении на вход приемника .
В этом случае критерию идеального наблюдателя будет соответствовать схема приемника (решающая схема), которая построена по правилу максимума апостериорной вероятности: регистрируется символ , если выполняется неравенство:
Данное выражение сокращенно можно записать:
При передаче двоичных сигналов данное правило принимает вид:
Воспользуемся формулой Байеса:
| ; | (2.3) | |
| где | – | априорная вероятность передачи символа (определяется до момента наблюдения и начала анализа сигнала) |
| – | условная плотность вероятности, определяемая выбором решающей схемы и свойством помех в канале – условная плотность распределения колебания при передаче символа . Иначе – функция правдоподобия. | |
| – | безусловная плотность вероятности не являющаяся функцией |
Учитывая, что не зависит от , получим:
Приемник, реализующий правило (2.4), получил название критерия идеального наблюдателя (приемника Котельникова). При передаче двоичных символов данное соотношение принимает вид:
Если неравенство выполняется, то регистрируется символ , в противном случае – .
Выражение (2.4) можно представить в виде отношения функций правдоподобиядвух гипотез о передаче символов и .
В реальных системах (передачи дискретной информации) связи данная ситуация наблюдается довольно часто – все символы от источника передаются как правило с одинаковыми вероятностями.
Его достоинство – отсутствие априорных сведений о передаваемых символах .
Недостаток – равная вероятность появления любой из ошибок ( или ).
– условная вероятность передачи при условии приема
– условная вероятность передачи при условии приема
Значения этих интегралов могут быть вычислены как соответствующие площади, ограниченные графиком плотностей условного распределения вероятностей (рис. 2)
 |
| Рис. 2. График плотности условного распределения вероятностей при передаче сигналов и . |
Вероятности ошибок первого и второго вида соответственно:
При этом полная вероятность ошибки равна:
В этом случае минимум имеет место при ., т. е. при выборе порога в соответствии с рис. 2.
Выводы
2. При равновероятной передаче различных символов критерий идеального наблюдателя реализуется правилом максимального правдоподобия.
Критерий идеального наблюдателя применяется тогда, когда нет различия в значимости ошибок первого и второго рода и когда известны априорные вероятности каждой из гипотез, что характерно для радиосвязи. [1]
В критерии идеального наблюдателя порог определяется отношением вероятности отсутствия сигнала к вероятности его наличия. Поскольку по предположению v / К 1, в результате чего ( 1 - - V) / v7 - v 1 / Vj, ясна аналогия между классической и новой процедурами обнаружения для данных условий. [2]
Этот критерий называют критерием идеального наблюдателя . [5]
Следует заметить, чго критерий идеального наблюдателя неприменим в тех случаях, когда ошибки име-ют различною цену и неизвестны априорные вероятности классов. [6]
В чем заключается сущность критерия идеального наблюдателя . [7]
В чем заключается отличие критерия идеального наблюдателя от кри-те эия максимума апостериорной вероятности; что общего у этих критериев. [8]
В чем заключается сущность критерия идеального наблюдателя . [9]
В чем заключается отличие критерия идеального наблюдателя от критерия максимума апостериорной вероятности; что общего у этих критериев. [10]
Решающее устройство, реализуемое на базе критерия идеального наблюдателя , обеспечивает минимальную вероятность ошибки принятия решения. Такие устройства принято называть идеальными приемниками. [11]
Таким образом, правила решения, соответствующие критериям идеального наблюдателя и максимума апостериорной вероятности, совпадают. Отличие заключается лишь в исходных условиях. [12]
Этот критерий оптимальности называется критерием Котельникова или критерием идеального наблюдателя . [13]
Определить структурную схему приемника, осуществляющего оптимальное по критерию идеального наблюдателя различение m - ичных сигналов st ( t), и вычислить соответствующую ему суммарную вероятность Р ошибочного приема. [14]
Таким образом, решающее устройство, работающее по критерию идеального наблюдателя , выбирает такую гипотезу, которая соответствует максимальной апостериорной вероятности. [15]
Это критерий, по которому качество приёмника оценивают безусловной вероятностью правильного приёма сигнала.
Подставив (11.4) в (11.3) и учитывая, что – безусловная плотность вероятности, не являющаяся функцией i, можно записать правила решения для идеального наблюдателя в следующей форме:
где – функция правдоподобия i-той гипотезы
Для построения решающей схемы по правилу (11.5) необходимо знать априорные вероятности символов , определяемые источником, а также свойства модулятора и канала, определяющие условные плотности вероятности. – функции правдоподобия.
Недостатком критерия максимума апостериорной вероятности является тот факт, что он обеспечивает большую вероятность правильного приёма за счёт сокращения области маловероятных и расширения области приёма высоковероятных символов; в результате редко передаваемые символы передавались бы менее надёжно, а они несут больше информации.
II. Правило (11.5) можно записать иначе - решение о том, что передавался символ , должно приниматься, если для всех выполняется m-1 неравенств:
Отношение в левой части этого неравенства называется отношением правдоподобия двух гипотез о том, что передавался символ . Его обозначают .
Для двоичной системы правило сводится к проверке
Во многих случаях различные ошибки приводят к различным последствиям.
III. Учёт последствий ошибок различного рода (связанных с передачей различных символов приводит к обобщению критерия идеального наблюдателя, известного под названием критерия минимального среднего риска (или байесовского критерия). Если при передаче символа принят символ , то при имеет место ошибка.
Интервал берётся по области решающей схемы и представляет вероятность того, что сигнал Z(t) попал в эту область, если передавался символ . Усреднив условный риск по всем символам , получим величину, называемую средним риском:
Критерий минимального среднего риска заключается в том, что оптимальной считается решающая схема, обеспечивающая наименьшее значение среднего риска . Приёмник, работающий по такому критерию называется байесовским. Из (11.9) видно, что при использовании этого критерия нужно помимо априорных вероятностей передачи отдельных символов знать и величины потерь Lij. Заметим, что если считать все ошибки равноценными ( ), то критерий минимального среднего риска совпадает с критерием идеального наблюдателя, а байесовский приёмник совпадает с идеальным приёмником Котельникова.
В этой и других сходных ситуациях чаще всего пользуются критерием приёма, известным под названием критерия Неймана Пирсона. Суть его заключается в том, что решающая схема считается оптимальной, если при заданной вероятности ложной тревоги обеспечивается минимальная вероятность пропуска цели .
Введём в рассмотрение функции правдоподобия гипотезы об отсутствии цели w(Z/0) и о наличии цели w(Z/1).
Минимизация при заданной величине достигается, если решение о наличии цели принимается при выполнении неравенства.
Где – пороговый уровень, определяемый заданной вероятностью ложной тревоги
В технике связи преимущественно применяют правило максимального правдоподобия. В том случае, когда все символы передаются равновероятно, правило максимального правдоподобия переходит в критерий идеального наблюдателя. Часто это правило решения применяют и при неизвестных или известных но не одинаковых априорных вероятностях символов. Правило максимального правдоподобия переходит в критерий минимума среднего риска, если положить .
Существуют так же и другие критерии, например, критерий взвешенной вероятности ошибки, минимаксный критерий, при котором коэффициент потерь считается заданным и другие.
В данном пособии ограничимся изложением классической задачи обнаружения сигнала. Пусть на выходе приёмного устройства имеется некий сигнал — случайный процесс:
Этот процесс может представлять либо только шумы — z (t) . либо сумму детерминированного сигнала V(t) и шума. Будем считать, что факт наличия сигнала V(t) тоже случаен.
Для решения вопроса о наличии сигнала в данный момент можно принять правило: сигнал присутствует, если U (t) > E, т.е. превышает некоторый уровень, порог и что сигнал отсутствует в противоположном случае. U(t)
Вероятность ложной тревоги (событие А), т. е. того, что будут совмещены два события — отсутствие сигнала и превышение шумом уровня Е ( при отсутствии сигнала) , равна априорной вероятности отсутствия сигнала, умноженной на апостериорную вероятность превышения уровня Е, при условии, что сигнал отсутствует. Априорной вероятностью q отсутствия сигнала зададимся, а апостериорную вероятность превышения шумом уровня Е легко получить по одномерной функции распределения шума W(x).
Вероятность того, что будут совмещены два события — присутствие сигнала и непревышение суммарным напряжением уровня Е (вероятность события Б) равна априорной вероятности присутствия сигнала, умноженной на апостериорную вероятность непревышения уровня Е при условии, что сигнал присутствует. Априорная вероятность присутствия сигнала равна:
Апостериорную вероятность непревышения уровня Е можно получить, используя одномерную функцию распределения суммы сигнала и шума — .
Так как события А и Б несовместимы, то вероятность ошибочного ответа Р(А или Б) равна:
Следовательно, искомая вероятность правильного ответа равна:
Возникает вопрос: как выбрать пороговый уровень Е? Ясно, что если уровень выбрать высоким , то вероятность Р(А) — ложной тревоги будет мала, но вероятность пропуска имеющегося сигнала будет велика. Наоборот, при низком уровне Е мала будет вероятность пропуска сигнала, но будет значительной вероятность ложной тревоги Р (А).Эти качественные рассуждения можно облечь в количественные соотношения, зависящие от конкретной задачи.
Может быть поставлена задача нахождения оптимальной величины порога Е, для которого вероятность правильного ответа (7.5) при заданных функциях распределения сигнала и шума максимальна. Вычисляя производную выражения (7.5) по Е и приравнивая её нулю, получаем уравнение для определения оптимального уровня:
Как следует из уравнения (7.6), определяемый уровень зависит от вида функций распределения.
Рассмотрим решение этого уравнения на примере обнаружения положительной телеграфной посылки (положительного импульса с амплитудой V) на фоне шума, подчиняющемуся нормальному закону распределения, с дисперсией . Наличие или отсутствие сигнала скажется только на среднем значении суммарного сигнала (7.1).
Соответственно плотности распределения будут иметь вид:
Смысл выбора порога (см. уравнение 7.6) иллюстрируется рис.3.7 .
Оптимальный уровень определяется точкой пересечения графика (1) — распределения шума с графиком (2) - совместного распределения сигнала и шума.( с учётом масштабных коэффициентов q,p). Как видно из рисунка 3.7 , при сильном сигнале уровень Е должен выбираться высоким, а при слабом этот уровень приближается к среднеквадратичному напряжению шума.
В случае, когда априорная вероятность появления сигнала неизвестна, часто полагают р=1/2, считая, что априорно равновероятно, как наличие, так и отсутствие сигнала. (заметим, что при этом q=1/2 тоже). Тогда для распределений (7.7) величина порога оказывается равной Е= V/2. ( См. Рис 3.6).
Если уровень Е выбран, то для рассматриваемого примера, где плотность распределения вероятностей шума и сигнала с шумом определены выражениями (7.7), для вероятностей ложной тревоги и пропуска сигнала, используя (7.2) и (7.3), получаются выражения:
На практике обычно интересуются не вероятностью пропуска сигнала, а вероятностью правильного обнаружения D (при условии, что превышен уровень Е):
Приведём другой пример. Подлежащий определению сигнал является огибающей суммарного высокочастотного колебания, которое вызвано как воздействием шума, так и полезного высокочастотного сигнала (радиоимпульса).
При воздействии одного шума плотность распределения огибающей r высокочастотного колебания описывается функцией Релея:
При совместном воздействии шума и высокочастотного сигнала огибающая
имеет плотность распределения, подчиняющуюся закону Релея — Райса:
и , при r модифицированная функция Бесселя.
Графики функций (7.10) и (7.11) приведены на рис. 38.
Если в этом примере опять принять p=q, то оптимальный уровень опять определится точкой пересечения кривой распределения шума с кривой совместного распределения сигнала и шума. Из рисунка видно: при сильном сигнале уровень Е должен выбираться высоким, а при слабом сигнале этот уровень приближается к среднеквадратичному напряжению шума. При p q масштабы графиков функций (7.10) и (7.11) соответственно изменятся, но оптимальный уровень будетпо-прежнемуопределяться уравнением (7.6).то есть точкой пересечения соответствующих графиков.
Рассмотренный критерий идеального наблюдателя, когда как ложное обнаружение, так и пропуск сигнала нежелательны в одинаковой степени, наиболее характерен для систем радиосвязи.
В радиолокационных системах обнаружения используется другой критерий, называемый критерием Неймана-Пирсона. Использование другого критерия объясняется тем, что ложное обнаружение цели может иметь весьма нежелательные последствия. Поэтому вероятность ложной тревоги должна быть весьма малой, обычно задаются её значением порядка -. Часто её значение не может быть увеличено даже учитывая то , что при этом снижается вероятность обнаружения сигнала. Итак, при использовании критерия Неймана-Пирсона вероятность ложной тревоги фиксируется изначально. Так как вероятность ложной тревоги функционально связана с относительным порогом, то последний также оказывается заданным
Практически стараются удовлетворить одновременно двум противоречивым требованиям : 1) чтобы вероятность Р(Б) пропуска сигнала не превосходила некоторой величины [Р(Б)
Левый график изображает функцию, а правый -.
Вертикальная линия, восстановленная из точки соответствующего значения относительного порога (E/ s ), совместно с графиками ограничивает площади, соответствующие вероятностям Р(А) и Р(Б).Они отмечены разной штриховкой.. Приведенные графики позволяют качественно проанализировать различные ситуации. Так при увеличении отношения сигнал /шум (а/ s ) график функции будет смещаться вправо(смотри рис.38). Поэтому для сохранения допустимой величины Р(Б) -вероятности пропуска сигнала, окажется возможным увеличить относительный порог E/ s . При этом площадь Р(А) — вероятность ложной тревоги уменьшится! Верно и обратное.
Поэтому единственной возможностью увеличения вероятности правильного обнаружения цели остаётся повышение отношения сигнал /шум на входе порогового устройства , т. е. на выходе линейного тракта приёмного устройства. Эти вопросы были рассмотрены в предыдущих разделах. Методики расчета конкретных радиотехнических устройств и количественных оценок вероятностных характеристик приема реальных флуктуирующих сигналов в присутствии шума достаточно сложны и изложены в специальной литературе.
Читайте также: