
Индукционный регулятор напряжения и фазорегулятор кратко
Обновлено: 05.07.2024
Фазорегулятор . Асинхронная машина с заторможенным фазным ротором может дать со стороны одной из обмоток постоянную по величине, но меняющуюся по фазе ЭДС. Для этого обмотки машины следует включить, как показано на рис. 5.6, а , а ротор повернуть в любую сторону на угол α .
На такой же угол окажется повернутым вектор ЭДС вторичной обмотки относительно вектора первичной ЭДС: в рассматриваемом случае результирующий поток Φ в зазоре машины набегает сначала, например, на обмотку фазы B , а позже − на обмотку фазы b , оси которых пространственно смещены на угол поворота α . Если принять для простоты, что у рассматриваемой асинхронной машины r 1 = r 2 = x σ1 = x σ2 = 0, то U 1 = E 1 и U 2 = E 2 . В этом случае диаграмма напряжений для одной из фаз примет вид, показанный на рис. 5.6, б .
5. Асинхронные машины
Рис. 5.6. Схема фазорегулятора
Фазорегулятор представляет поворотный трансформатор с регулируемой фазой вторичного напряжения относительно первичного. Поворот ротора осуществляют при помощи червячного редуктора с самоторможением, так как на ротор фазорегулятора при нагрузке действует вращающий момент. Это относится и к другим машинам с заторможенным ротором. Фазорегуляторы применяют главным образом в лабораториях, в частности, при испытании счетчиков электрической энергии различных реле и других приборов и аппаратов.
Трехфазный индукционный регулятор служит для регулирования на-
пряжения трехфазной сети переменного тока. Обмотки регулятора включают по схеме автотрансформатора, и регулятор представляет собой поворотный автотрансформатор.
Обмотки статора и ротора асинхронной машины можно соединить, как показано на рис. 5.7, а , и подключить обмотку ротора к сети напряжением U вх . Ток обмотки ротора создаст вращающееся магнитное поле, которое индуктирует в каждой обмотке ЭДС E 1 и E 2 . Эти ЭДС, оставаясь неизменными по величине, могут отличаться по фазе.
При совпадении осей обмоток статора и ротора сдвига фаз между ЭДС E 1 и E 2 нет (рис. 5.7, б ). Напряжение на выходных зажимах определится арифметической суммой векторов ЭДС Е 1 и Е 2 и достигнет макси-
мального значения ( U вых = Е max ).
При повороте ротора на некоторый угол ±α вектор ЭДС Е 2 опережает или отстает на тот же угол относительно ЭДС Е 1 . При повороте ротора на 180 ° векторы ЭДС Е 1 и Е 2 направлены встречно и выходное напряжение равно разности этих ЭДС ( U вых = Е min ).
5. Асинхронные машины
Рис. 5.7. Схема ( а ) и векторная диаграмма ( б ) напряжений индукционного регулятора
В общем случае напряжение на выходных зажимах определяется векторной суммой:
и при равенстве эффективных витков статорной и роторной обмоток может плавно изменяться от нуля (при α = ± 180 ° ) до двойного линейного напряжения сети (при α = 0).
Индукционные регуляторы по своей работе аналогичны автотрансформаторам, и их электромагнитная (расчетная) мощность тем меньше проходной (полезной), чем ниже пределы регулирования напряжения. Преимуществом регуляторов является плавное регулирование напряжения в широких пределах. К недостаткам этих машин следует отнести:
• искажение формы кривой ЭДС (и выходного напряжения) зубцовыми и высшими гармониками магнитного поля;
• возникновение вращающих моментов на валу при α ≠ 0;
• расхождение по фазе напряжений перед регулятором и за ним. Последние два недостатка устраняют, сдвоив регуляторы, т. е. же-
стко соединив их валы и изменив порядок чередования фаз в одной из машин.
5. Асинхронные машины
5.3. Работа асинхронной машины при вращающемся роторе
При вращении ротора вращающееся магнитное поле, пересекая витки его обмотки с частотой n 1 – n , индуцирует в них ЭДС частотой
где n – частота вращения ротора, об/с.
Достаточно умножить выражение (5.31) на дробь n 1 / n 1 , чтобы доказать с учетом соотношений (1.24) и (1.30), что частота тока в роторе пропорциональна скольжению:
ЭДС обмотки вращающегося ротора
E 2 s = 4,44 f 2 w 2 k oб2 Φ
или с учетом выражения (5.33)
E 2 s = 4,44 f 1 sw 2 k oб Φ = E 2 s ,
где E 2 – ЭДС обмотки неподвижного ротора, полученная по выражению (5.2), когда s = 1 и f 2 = f 1 , а обмотка ротора разомкнута (режим холостого хода при неподвижном роторе).
При замкнутой обмотке ротора по ней под действием ЭДС E 2 s проходит ток с частотой f 2 , создающий бегущую волну МДС F 2 , вращающуюся относительно ротора с частотой
n 2 F = 60 f 2 p = 60 f 1 s p = n 1 s = n 1 − n .
Направление вращения МДС ротора определяется порядком чередования максимумов токов в фазах, т. е. МДС ротора вращается в ту же сторону, что и магнитное поле статора.
Частота вращения МДС ротора относительно статора (с учетом того, что ротор вращается с частотой n )
n 2 ′ F = n + n 2 F = n 1 (1 − s ) + n 1 s = n 1 .
5. Асинхронные машины
Следовательно, при вращении ротора МДС статора F 1 и МДС ротора F 2 вращаются в пространстве с одинаковой частотой, т. е. относительно друг друга они неподвижны. Таким образом, полученные ранее для заторможенного ротора выводы о взаимодействии токов в первичной и вторичной обмотках полностью остаются в силе и для вращающегося ротора. Из сказанного следует, что в асинхронной машине магнитное поле, вращающееся с частотой n 1 , возникает в результате совместного действия бегущих волн МДС статора и ротора. Оно служит связующим звеном между статором и ротором, обеспечивая обмен энергией между ними точно так же, как переменное магнитное поле в трансформаторе осуществляет передачу энергии из первичной обмотки во вторичную. Преобразование электрической энергии, потребляемой асинхронной машиной, в механическую и связанные с этим потери мощности наглядно представляются энергетическими диаграммами.
Если к асинхронному двигателю подвести от сети электрическую мощность P 1 , то часть ее покроет потери электрические p эл1 в проводниках обмотки статора, часть – магнитные потери р мг в статоре.
Мощность Р 1 − p эл1 − р мг = Р эм − электромагнитная – передается магнитным полем через воздушный зазор ротору. Некоторая часть мощности Р эм пойдет на покрытие потерь p эл1 в проводниках обмотки ротора, другая, весьма незначительная и в большинстве случаев вовсе не учитываемая из-за малой частотыперемагничивания, р мг2 − напокрытиемагнитныхпотерьвроторе.
Разность мощностей Р эм − p эл1 − р мг = Р мх − полная механическая мощность – приведет ротор во вращение. При этом возникнут потери на трение в подшипниках и поверхности ротора об охлаждающую среду. Вычитанием из полной механической мощности потерь на трение и добавочных (покрываемых главным образом со стороны ротора) получают полезную механическую мощность на валу
Р мх − р мх − р д = Р 2 .
Энергетическая диаграмма асинхронного двигателя приведена на рис. 5.8.
Выразим электромагнитную и механическую мощности через электромагнитный вращающий момент М :
где Ω 1 = 2π n 1 и Ω = 2π n – угловые скорости магнитного поля статора и ротора; n 1 и n – частоты вращения, соответственно, магнитного поля статора и ротора, об/с.
Индукционный регулятор напряжения (ИР) представляет собой асинхронную машину с фазным ротором, предназначенную для плавного регулирования напряжения. Рассмотрим работу трехфазного ИР, получившего преимущественное применение. Ротор ИР заторможен посредством червячной передачи, которая не только удерживает его в заданном положении, но и позволяет плавно поворачивать его относительно статора. Обмотки статора и ротора в ИР имеют автотрансформаторную связь (рис. 17.1, а), поэтому ИР иногда называют поворотным автотрансформатором.
Напряжение сети U1подводится к обмотке ротора, при этом ротор создает вращающееся магнитное поле, наводящее в обмотке ротора ЭДС = - , а в обмотке статора — ЭДС (рис. 17.2, а).
Фазовый сдвиг этих ЭДС относительно друг друга зависит от взаимного пространственного положения осей обмоток статора и ротора, определяемого углом α. При α = 0 оси обмоток совпадают, вращающееся поле одновременно сцепляется с обеими обмотками и ЭДС и совпадают по фазе (при этом и находятся в противофазе). При α = 180 эл. град ЭДС и окажутся в противофазе ( и совпадают по фазе). Если пренебречь внутренними падениями напряжения, то напряжение на выходе ИР определяется геометрической суммой:
= + (17.1)
При повороте ротора концы векторов и описывают окружность (рис. 17.2, б), при этом изменяется от = - при α = 0 до = + при α = 180 эл. град (рис. 17.2, в). Поворот ротора осуществляется либо вручную штурвалом, либо дистанционно включением исполнительного двигателя.
ИР применяются во всех случаях, где необходима плавная регулировка напряжения, например в лабораторных исследованиях.
Фазорегулятор (ФР). Предназначен для изменения фазы вторичного напряжения относительно первичного при неизменном вторичном напряжении. В отличие от ИР обмотки ротора и статора ФР электрически не соединены друг с другом, т. е. имеют трансформаторную связь (см. рис. 17.1, б),поэтому ФР иногда называют поворотным трансформатором.
Изменение фазы вторичного напряжения осуществляется поворотом ротора относительно статора. Первичной обмоткой в ФР обычно является обмотка статора. Фазорегуляторы применяются в устройствах автоматики (для фазового управления) и измерительной технике
( для проверки ваттметров и счетчиков).
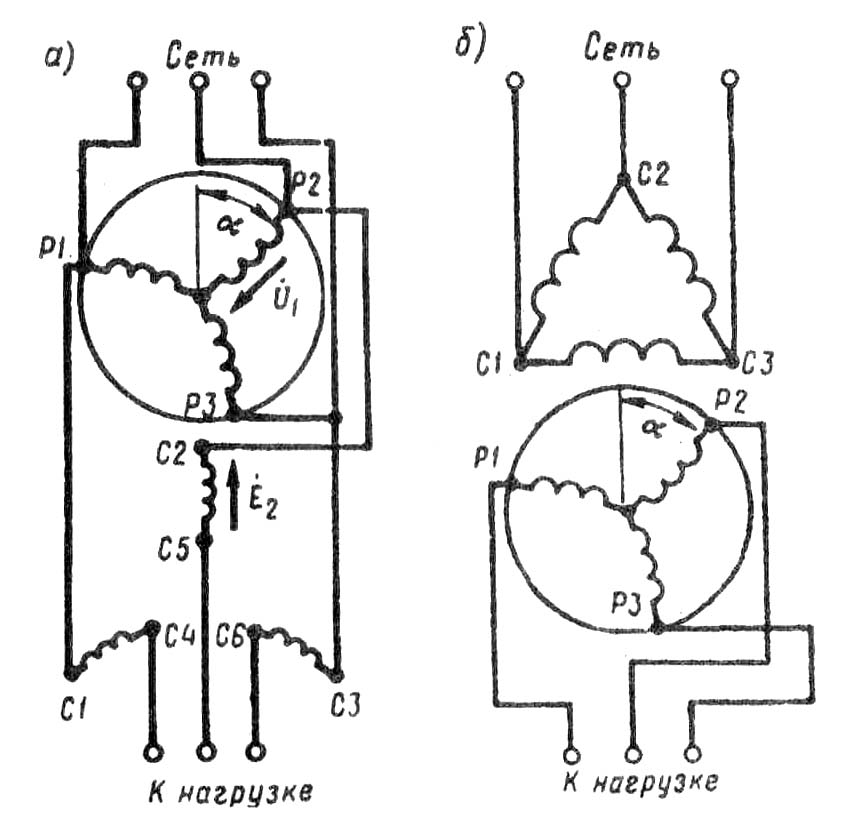
Рис. 17.1. Схемы соединения индукционного
регулятора напряжения (а) и фазорегулятора (б)
РЕФЕРАТ
Тема: “АСИНХРОННЫЕ МАШИНЫ СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ”
РАЗРАБОТАЛ: студент группы 3РЭС
• Асинхронные машины специального назначения
Индукционный регулятор напряжения и фазорегулятор
Индукционный регулятор напряжения (ИР) представляет собой асинхронную машину с фазным ротором, предназначенную для плавного регулирования напряжения. Рассмотрим работу трехфазного ИР, получившего преимущественное применение. Ротор ИР заторможен посредством червячной передачи, которая не только удерживает его в заданном положении, но и позволяет плавно поворачивать его относительно статора. Обмотки статора и ротора в ИР имеют автотрансформаторную связь (рис. 17.1, а), поэтому ИР иногда называют поворотным автотрансформатором.
Напряжение сети U1подводится к обмотке ротора, при этом ротор создает вращающееся магнитное поле, наводящее в обмотке ротора ЭДС = - , а в обмотке статора — ЭДС (рис. 17.2, а).
Фазовый сдвиг этих ЭДС относительно друг друга зависит от взаимного пространственного положения осей обмоток статора и ротора, определяемого углом α. При α = 0 оси обмоток совпадают, вращающееся поле одновременно сцепляется с обеими обмотками и ЭДС и совпадают по фазе (при этом и находятся в противофазе). При α = 180 эл. град ЭДС и окажутся в противофазе ( и совпадают по фазе). Если пренебречь внутренними падениями напряжения, то напряжение на выходе ИР определяется геометрической суммой:

= + (17.1)
При повороте ротора концы векторов и описывают окружность (рис. 17.2, б), при этом изменяется от = - при α = 0 до = + при α = 180 эл. град (рис. 17.2, в). Поворот ротора осуществляется либо вручную штурвалом, либо дистанционно включением исполнительного двигателя.
ИР применяются во всех случаях, где необходима плавная регулировка напряжения, например в лабораторных исследованиях.
Фазорегулятор (ФР). Предназначен для изменения фазы вторичного напряжения относительно первичного при неизменном вторичном напряжении. В отличие от ИР обмотки ротора и статора ФР электрически не соединены друг с другом, т. е. имеют трансформаторную связь (см. рис. 17.1, б),поэтому ФР иногда называют поворотным трансформатором.
Изменение фазы вторичного напряжения осуществляется поворотом ротора относительно статора. Первичной обмоткой в ФР обычно является обмотка статора. Фазорегуляторы применяются в устройствах автоматики (для фазового управления) и измерительной технике
Асинхронная машина с фазной обмоткой ротора применяется для самых различных целей. В частности, заторможенная машина может служить автотрансформатором с плавно регулируемым коэффициентом трансформации.
Схема замещения такого индукционного регулятора (называемого также поворотным автотрансформатором) показана на рис. 14.39. Обмотки статора и ротора во всех трех фазах соединены между собой последовательно, а на выводы обмотки ротора подано напряжение Unxпитающей сети. Сопоставив эту схему индукционного регулятора со схемой трехфазного автотрансформатора, легко убедиться в их принципиальной тождественности. Обмотка ротора служит первичной обмоткой автотрансформатора, а три свободных вывода обмотки статора являются вторичными выходными выводами устройства. Но в автотрансформаторе отношение первичного и вторичного напряжений постоянно и определяется отношением чисел витков обмоток, а в индукционном регуляторе отношение напряжений Unx/ UBhlxзависит также от относительного пространственного положения обмоток статора и ротора. Если оси этих обмоток совпадают, то совпадают по фазе и индуктируемые в них ЭДС. Если же вращающееся магнитное поле пересекает обмотку статора не одновременно с обмоткой заторможенного ротора, то пространственный сдвиг между осями обмоток (3 обусловит пропорциональный сдвиг фаз а (см. 14.6) между ЭДС статора и ротора, а следовательно, и между напряжениями на обмотках статораUCTи ротораUp.
Фазное напряжение на вторичной стороне индукционного регулятора равно сумме напряжения статора и ротора:
Ротор заторможен, но посредством червячной передачи его можно поворачивать и таким образом изменять угол сдвига фаз между С/р иUCTв пределах от 0 до 360° (рис. 14.40). Это дает возможность изменять вторичное напряжение в пределах отU2= Up+ UCTдо

. ^ rt~ X . Ротор . СтаторСБА U,
Фазное напряжение ротора равно фазному напряжению сети Up— С/ф, а обмотка статора индукционного регулятора обычно имеет число витков, равное числу витков фазной обмотки ротора, поэтомуUCT= Up= = Щ. Следовательно, пределы регулирования вторичного напряжения индукционного регулятора, т. е. напряжения между выводами обмотки статора ^вых = U2, составляют от 0 до 2UBX= = 2 £/,, — двойного значения линейного
напряжения сети. При значительных мощностях очень ценно, что регулирование в таких широких пределах осуществляется без замыкания или размыкания контактов. Это существенно увеличивает надежность устройства.
Взаимодействие токов ротора с магнитным полем может создавать в индукционном регуляторе значительный вращающий момент, что связано с усложнением поворотного устройства (обычно это самотормозящая червячная передача) и затрудняет управление положением ротора. Чтобы разгрузить установку от этого нежелательного электромагнитного момента, регуляторы большой мощности изготовляются в виде двух соединенных общим валом асинхронных машин, причем электромагнитные моменты, воздействующие на их роторы, имеют противоположные направления и полностью взаимно компенсируются. Обмотки роторов двух машин в таком регуляторе соединяются параллельно, а обмотки статора — последовательно.
По сравнению с трансформатором КПД индукционного регулятора значительно ниже из-за наличия воздушного зазора в магнитной цепи. По сравнению с двигателем в индукционном регуляторе кроме потерь в сердечнике статора имеют место значительные потери в сердечнике ротора. Условия охлаждения в регуляторе существенно хуже, чем в двигателе, из-за отсутствия вращения. Для улучшения теплоотдачи индукционных регуляторов средней и большой мощности применяют масляное охлаждение.

То обстоятельство, что посредством поворота заторможенного ротора можно плавно изменять фазу ЭДС, индуктируемых в обмотках ротора, используется в фазорегуляторах. Трехфазная обмотка ста-

тора такого фазорегулятора (ф на рис. 14.41) включается в сеть, а обмотка заторможенного ротора служит вторичной обмоткой поворотного трансформатора. Действующее значение ЭДС, индуктируемых в обмотках ротора, не зависит от положения ротора, так как вращающееся магнитное поле машины, возбуждаемое токами обмоток статора, постоянно по значению. Но сдвиг фаз между ЭДС в обмотках статора и ротора зависит от положения ротора, и, поворачивая последний, можно изменять этот сдвиг в пределах 0 — 360°. Фазорегуляторы применяются при проверке счетчиков энергии и ваттметров переменного тока (рис. 14.41), для управления работой выпрямителей с тиристорами и т.д.
Асинхронный тахогенератор
Асинхронный тахогенератор применяется в устройствах автоматики, телемеханики и электроприводе как датчик угловой скорости вращения вала какого-либо механизма.
Одна из схем однофазного асинхронного тахогенератора с полым ротором приведена на рис. 14.42. Если ротор тахогенератора неподвижен (ojp= 0), то переменный магнитный поток Ф*, возбуждаемый током в катушкеwB03,подключенной к сети, индуктирует в стенках полого ротора как в короткозамкнутой вторичной обмотке трансформатора переменные токи гтр. Эти токи создают переменный маг- литный поток Ф^, но в измерительной катушке гииз, ось которой расположена под углом 90° к оси катушки возбужденияwBQ3,ЭДС не индуктируется.
Если ротор тахогенератора вращается с угловой скоростью шр, то в стенках полого ротора, пересекающих магнитные линии потока возбуждения Ф^, будут индуктироваться кроме переменных токов гтр еще и переменные токи гвр, обусловленные вращением ротора. Создаваемый переменными токами гвр переменный магнитный поток Фх будет направлен вдоль оси измерительной катушки и будет индуктировать в ней переменную ЭДС, амплитуда которой пропорциональна угловой скорости вращения ротора.

Благодаря простоте и надежности асинхронных тахогенераторов они широко применяются в системах регулирования и управления.
ГЛАВА 15 СИНХРОННЫЕ МАШИНЫ
Общие сведения
У синхронных электрических машин ротор в установившемся режиме вращается с угловой скоростью вращающегося магнитного поля, создаваемого токами в фазных обмотках статора, подобного статору асинхронной машины. Это достигается тем, что ротор синхронной машины представляет собой обычно электромагнит или реже постоянный магнит с числом пар полюсов, равным числу пар полюсов вращающегося магнитного поля. Взаимодействие полюсов вращающегося магнитного поля и полюсов ротора обеспечивает постоянную частоту вращения последнего независимо от момента на валу. Это свойство синхронных машин позволяет применять их в качестве двигателей для привода механизмов с постоянной частотой вращения. Распространенность синхронных двигателей не столь ши-. рока, как асинхронных, но в ряде случаев, например в металлургии для главных приводов непрерывной прокатки, они необходимы. Единичная мощность синхронного двигателя в приводах большой мощности достигает нескольких десятков мегаватт.
Основной областью применения синхронных машин является их работа в качестве промышленных генераторов для выработки электрической энергии на электростанциях.
Единичная мощность современных электрогенераторов достигает 1500 MB А.
Устройство синхронной машины
Основными частями синхронной машины являются статор и ротор, причем статор не отличается от статора асинхронной машины (см. рис. 14.1). Сердечник статора собран из изолированных друг от друга пластин электротехнической стали и укреплен внутри массивного корпуса. В пазах с внутренней стороны статора размещена в большинстве случаев трехфазная обмотка.
Ротор синхронной машины представляет собой электромагнит — явнополюсный (рис. 15.1, где 1 — полюсы; 2 — полюсные катушки;
3 — сердечник ротора; 4 — контактные кольца) или неявнополюсный (рис. 15.2, где 1 — сердечник ротора; 2 — пазы с обмоткой; 3 — контактные кольца). Ток в обмотку ротора поступает через контактные кольца и щетки от внешнего источника постоянного тока — возбудителя.
Для получения синусоидальной ЭДС в проводах фазных обмоток статора необходимо, чтобы индукция в воздушном зазоре, создаваемая магнитным полем тока ротора, распределялась по синусоидальному закону вдоль окружности ротора. В явнополюсной машине это достигается увеличением ширины воздушного зазора от середины полюса к краям. В быстроходных машинах с неявными полюсами используется соответствующее распределение обмотки возбуждения вдоль окружности ротора.
У многополюсной синхронной машины ротор имеет р пар полюсов, а токи в обмотке статора образуют тоже р пар полюсов вращающегося магнитного поля (как у асинхронной машины, см. рис. 14.10). Ротор должен вращаться с частотой вращения поля, следовательно, его синхронная частота вращения
При стандартной промышленной частоте 50 Гц максимальная частота вращения, соответствующая двухполюсной (р = 1) машине, будет 3000 мин" 1 . Это частота вращения современного турбоагрегата, состоящего из первичного двигателя — паровой турбины и не- явнополюсного синхронного генератора (турбогенератора).
У гидроагрегата гидравлическая турбина вращается относительно медленно. Это вынуждает изготовлять гидрогенераторы многополюсными, с явными полюсами и в большинстве случаев — с вертикальным валом. Частота вращения роторов этих генераторов — от 60 до нескольких сотен оборотов в минуту, чему соответствует несколько десятков пар полюсов. Вследствие относительно малых частот вращения генераторы к гидравлическим турбинам имеют значительно большую массу на единицу мощности — свыше 8 кг/(кВ • А), чем генераторы к паровым турбинам — менее 2,5 кгДкВ- А).
Главная Асинхронный двигатель и асинхронные машины
При 5i 0,5 и S2 f\ ротор асинхронной машины приводят во вращение в направлении, противоположном вращению

Рис. 9.1. Схемы асинхронного преобразователя частоты при подключении приводного двигателя к сети (а) и к выходу преобразователя частоты (б)
ПОЛЯ. При этом преобразователь частоты работает в режиме электромагнитного торможения при s>l, а двигатель передает ему
Направления первичной Pi и вторичной Рг мощностей преобразователя частоты, механической Рмех и электрической Рэл мощностей приводного двигателя и мощности Рн, подаваемой на нагрузку, для рассматриваемого режима показаны на рис. 9.1, а сплошными стрелками.
Читайте также: