
Беспилотные автомобили история создания кратко
Обновлено: 30.06.2024
Пожалуй, многие ждут того дня, когда персональный транспорт будет тесно интегрирован в городскую инфраструктуру и сможет самостоятельно доставлять нас из пункта А в пункт Б, пока мы будем заниматься своими делами. На самом деле, идея создания самоуправляемого автомобиля далеко не нова. Еще в самом начале становления автомобильной промышленности, производители видели огромный потенциал в беспилотных технологиях.
Но прежде чем самоуправляемые автомобили смогли действительно самостоятельно передвигаться по дорогам прошло не одно десятилетие. Первые образцы беспилотных авто появились только в 1980-х годах, когда автоконцерны совместно с институтами представили свои прототипы общественности. Среди них разработка автоконцерна Mercedes-Benz и Военного университета Мюнхена – VaMP, который представлял собой по-настоящему автономный автомобиль. Он мог проезжать в условиях интенсивного движения на большие расстояния без вмешательства человека, использовал компьютерное зрение для распознавания быстро движущиеся препятствия, такие как другие автомобили, и автоматически их избегать и обгонять.

Беспилотный автомобиль VaMP разработки Mercedes-Benz и Военного университета в Мюнхене
С тех пор технологии беспилотных транспортных средств получили бурное развитие. Многие IT-компании и автоконцерны включились в битву автономных технологий. Среди них Google, IBM, Яндекс, Uber, Lyft, а также General Motors, Volkswagen, BMW, Volvo, Nissan и другие.
Как работают автономные автомобили
Беспилотники управляются с помощью десятков датчиков, установленных в автомобиле, а также бортового компьютера, который собирает и анализирует информацию с сенсоров, и принимает решения. Как правило, робомобили оснащают такими датчиками:
- LiDAR
- Радары
- Камеры
- GPS
- Одометры
- Гиростабилизаторы
С помощью сенсоров автомобиль оценивает собственное положение в пространстве, обнаруживает препятствия, другие автомобили, а также свободно перемещается по городу.
А помогает робомобилю обрабатывать эту информацию бортовой компьютер, который с помощью алгоритмов компьютерного зрения и нейронных сетей анализирует окружающую среду и принимает решения.
Степень свободы робомашин
Важно отметить, что не все автономные транспортные средства обладают полной свободой передвижения и принятия решений. Так, Американское общество автомобильных инженеров разработала классификацию автоматизированных транспортных средств, которая уже успела стать ориентиром автономности машин далеко за пределами США. Давайте подробнее рассмотрим эту классификацию.
Уровень 0. Автоматизация отсутствует. Транспортным средством управляет человек.
Уровень 1. Водитель и автопилот управляют автомобилем вместе. Самый простой пример – это круиз-контроль, когда водитель рулит, а система автоматически поддерживает скорость, мощность работы двигателя и управляет тормозом, а в случае необходимости, машина может в автоматически снизить скорость. Парктроник также считается технологией первого уровня автономности.
Уровень 2. Автомобиль с этим уровнем автономности считается частично автоматизированным, однако водитель должен держать руки на руле и быть готовым в любой момент перенять управление транспортным средством.
Уровень 4. Широкая автономность. В этом случае от человека не требуется внимания во время работы автопилота, он также может заниматься своими делами или даже покинуть кресло водителя. Автомобиль с четвертым уровнем автоматизации полностью автономен в определенных геозонах или условиях, например, в пробке. Однако когда условия прекращаются, автомобиль просит человека занять место водителя и продолжить управление.
Уровень 5. Полная автоматизация. Действия и контроль человека не требуется.
Таким образом, большинство современных автомобилей уже являются частично автоматизированными. Однако конечная цель многих производителей – пятый уровень. И прежде чем такому беспилотнику попасть на дороги общего пользования, ему производителям необходимо пройти долгий путь разработок и тестирования технологии.
Коммерческие беспилотники уже здесь
Многие из упомянутых компаний уже достигли определенного прогресса в создании полностью беспилотного автомобиля. Одним из самых дружелюбных мест для тестирования робомобилей является Калифорния. Так, правительство штата еще в 2018 году разрешило компаниям тестировать автономные транспортные средства на дорогах общего пользования, при этом обязав компании публиковать отчеты о результатах тестирования.
Например, дочерняя компания Google Waymo одна из первых получила разрешение на тестирование своих робомашин на дорогах Калифорнии. В 2018 году, их автомобили проехали свыше 2 миллионов километров, при этом уровень отказов системы составил один раз на 18 тысяч километров.

Беспилотный автомобиль Waimo
Компания General Motors также сообщила, что в 2018 году их автомобили GM Cruise проехали 720 тысяч километров в Калифорнии, а показатель отказов – один на восемь тысяч километров.
При этом, исследователи Gartner обращают внимание, что нельзя опираться лишь на данные отчетов, ведь штат не требует, чтобы компании указывали информацию об условиях тестирования, сложности дорог, условий освещения или плотности потока машин.

Беспилотный автомобиль GM Cruise
Тем не менее, разработчики робомобилей довольны полученными результатами и уже активно монетизируют технологию. Самый частый случай – использование автономных машин для перевозки пассажиров. Например, Waymo имеет собственную роботизированную службу такси в Аризоне, где на части маршрутов человек-оператор вовсе отсутствует. На таких участках, в случае необходимости, управление над автомобилем может перенять оператор, который находится в офисе компании и безопасно завершить движение.
Также услуги роботакси предоставляют такие компании, как Baidu, Яндекс, Uber, Lyft и другие.
Что будет дальше?
Автономные автомобили уже совсем скоро заполонят улицы наших городов. Свидетельство этому – успешное тестирование робомобилей в полевых условиях, а также удавшиеся попытки заработать на них. Как и любая другая технология, робомобили могут столкнуться с рядом проблем, прежде всего, неприятием со стороны человека. Когда автомобили лишатся нужды в операторе, большинство водителей служб пассажирских и грузовых перевозок потеряют работу. Кроме этого, алгоритму сложнее доверить свою жизнь, нежели человеку. И напоследок, если люди потеряют возможность водить автомобиль – то кто же заменит автопилот в случае экстренной ситуации?
Тем не менее все эти проблемы решаемы. Люди способны быстро адаптироваться к новым условиям, и адаптация робомашин не станет исключением. А вот проблемы с законодательным регулированием, готовностью инфраструктуры и стандартизацией производства беспилотных технологий могут серьезно замедлить развитие технологии. Однако прогрессивные общества готовы встретить беспилотное будущее. Должны быть готовы и мы.


Впрочем, до середины XX века разработки в области беспилотных технологий носили скорее экспериментальный, чем практический характер, и, так или иначе, без непосредственного участия человека ни одна модель не обходилась. Беспилотные автомобили, как и летающие дроны, вначале были обычными прототипами на дистанционном управлении, и лишь постепенно становились автономными.
От научных экспериментов до робомобилей Google

Самая первая модель управлялась посредством передачи сигнала через кабель. Второй прототип Адамс уже сделал радиоуправляемым. В 1970-х годах математик Джон Маккарти усовершенствовал тележку, оснастив ее системой технического зрения, с помощью которого устройство могло частично автономно двигаться, ориентируясь на белую линию. Тележка также имела несколько камер, дальномер и четыре канала для сбора информации. Более того Маккарти были предприняты попытки создания трехмерного картографирования окружающей обстановки.
В последующие годы основные усилия инженеров в основном были направлены на разработку уже полностью автономного, а не дистанционного управляемого транспорта. На начальных этапах наибольших успехов добились ученые из США, Японии и Германии. Так, по утверждениям независимых экспертов, первый полностью автономный автомобиль удалось создать группе немецких исследователей под руководством пионера робототехники Эрнста Дикманса в 1980 году.


В середине 1990-х годов большой толчок к развитию беспилотных автомобилей дал прорыв в области искусственного интеллекта, нейронных сетей и машинного обучения. В 2004 году прошло первое в мире соревнование с участием роботов-автомобилей DARPA Grand Challenge, а еще спустя шесть лет Google протестировала свои первые робомобили. После этого идею создания беспилотных автомобилей подхватило большинство крупных автомобильных компаний. В настоящее время наиболее крупными игроками в этой сфере являются компании General Motors, Volkswagen, Audi, BMW, Volvo, Nissan, Google, Tesla Motors и другие.
Итоги и перспективы
Как можно наблюдать, большинство технологий, применяемых в современных беспилотных автомобилях (радары, лидары, различные датчики, системы спутниковой навигации, бортовые компьютеры, камеры и т.д.), были созданы еще более 20 лет назад. Тогда почему беспилотные автомобили до сих пор плотно не вошли в нашу жизнь? По сути, на этот вопрос ответил тот же Дикманс в одной из своих работ. Он сказал, что для того, чтобы робомобиль научился делать все то, что умеет делать профессиональный водитель, ему нужно научиться обрабатывать огромный объем информации и адекватно ее применять в сложной дорожной обстановке.

Поэтому, как полагают ученые, чем дольше автомобиль будет находиться в движении, тем он в большей мере будет получать и применять необходимую информацию. Например, в автомобиль Google перед поездкой заранее устанавливаются карты с маршрутами. Но что делать, если автомобилю придется передвигаться по незнакомым маршрутам? В компании пока не могут дать четкий ответ на этот вопрос. На помощь этой и не только проблеме пришли технологии больших данных, с помощью которых беспилотный автомобиль будет получать, и передавать большие объемы актуальной информации. Кроме того, для нормального функционирования робомобилей требуется существенно изменить дорожную инфраструктуру.
Несмотря на все сложности в интеграции беспилотных автомобилей в современную жизнь, существует одно большое преимущество, которое оправдывает все усилия и финансовые затраты. По официальным данным, в дорожно-транспортных происшествиях ежегодно погибает 1,3 млн. человек. Если в ближайшее десятилетие, доля беспилотных автомобилей составит хотя бы 10%, ежедневно удастся избежать тысяч смертей.
Сейчас во всем Мире идет четвертая промышленная революция. Её суть в том, что материальный мир соединяется с виртуальным, в результате чего рождаются новые кибер-физические системы (англ. cyber-physical system; CPS), объединённые в одну цифровую экосистему. Экономика переходит к новому технологическому укладу, основу которого во многом составляют технологии искусственного интеллекта, облачных вычислений и робототехнические системы, главная цель использования которых – освобождение человека от скучного рутинного труда, повышение качества жизни, новый уровень организации производства. При чём тут беспилотники? А вот при чём.
Инструментарий, который будет пронизывать все отраслевые блоки в ближайшие 10 лет – это искусственный интеллект. А беспилотные технологии, развивающиеся с помощью этого инструментария – наиболее перспективная сфера в автомобильной отрасли. Сегодня над технологиями автономного вождения работают крупные технологические компании Мира. Возможно многие не поверят, но здесь Россия находится в первых рядах! Дело в том, что в нашей стране исторически сложилась довольно сильная школа искусственного интеллекта, одна из лучших в мире. К тому же наш подход в создании ИИ для беспилотников отличается, скажем, от подхода Google.
В наземном транспорте с автономным управлением используют байесовские алгоритмы одновременной локализации и картирования (англ. simultaneous localization and mapping, SLAM). Суть алгоритма в объединении данных от нескольких установленных на машину датчиков, поступающих в режиме реального времени, с offline-картой при одновременном контроле текущего местоположения и пройденного пути. Компания Waymo (Google) усовершенствовала метод SLAM и разработала собственный метод обнаружения и отслеживания движущихся объектов (англ. detection and tracking of moving objects, DATMO).
Есть ещё технология, при которой автомобиль взаимодействует с инфраструктурой дороги (умный город), но пока это возможно только в ограниченном пространстве в маленьких экспериментальных городах (наподобие Иннополиса), поскольку масштабно этим заниматься долго и дорого.
Напомним, что главная задача беспилотника – провести пассажира по нужному ему маршруту безопасно. То есть любой нюанс дороги, который может представлять опасность при движении по ней автомобиля, должен быть учтён системой. А значит, информация о дорожной сцене должна быть максимально точной. Качество (точность) этой информации зависит от качества датчиков, вернее, от того, что и как они умеют детектировать.
В качестве датчиков в для наземных беспилотников применяют стереокамеры, GPS, гиростабилизаторы, датчики одометрии, радары и лидары (лазерные сенсоры, измеряющие расстояние до объектов с помощью света). Два последних прибора обычно являются взаимоисключающими: либо радары, либо лидары. В основном используют лидары в сочетании с камерами. Чтобы данные были исчерпывающими, камер и лидаров нужно несколько, что делает стоимость такого автомобиля очень высокой (лидары стоят десятки тысяч долларов). Тем не менее многие компании-разработчики беспилотного транспорта используют именно дорогие лидары (включая Яндекс). А, например, в Tesla используют только камеры, но достаточно ли их для обеспечения безопасности?
Оснащение датчиками беспилотного автомобиля Toyota Prius в версии Google
Мы в Cognitive Pilot, как производители “мозгов” для беспилотников, ставили перед собой задачу разработать такую систему, которая была бы доступна и хорошо (то есть безопасно) работала на дорогах в условиях российских реалий: “проблемное” дорожное полотно, сложные погодные и климатические условия, заслонённые знаки, передвижение ночью. Проведя множество тестов, мы обнаружили, что лазеры лидаров при плохой погоде или в условиях недостаточной видимости могут “халтурить”, поскольку считывают не только сам объект, но и дождь со снегом перед ним, читай “вместо него” – поэтому их требуется несколько (см. видео сравнения работы радара и лидара в экспериментальных условиях). Вместо дорогих лидаров мы используем монокамеру и один 4D-радар с когнитивной визуализацией собственной разработки. Информация с этих датчиков, обрабатываемая технологией Cognitive Low Level Data Fusion, не уступает нескольким лидарам и позволяет достичь описанных выше целей.
Расположение основных датчиков на беспилотном автомобиле Nissan X—trail (Cognitive Technologies)
Для тех из вас, кому интересны наши технологии автономного вождения, мы опубликуем более подробный пост. А пока давайте посмотрим, как всё начиналось с беспилотниками и к чему пришло.
Эксперименты по созданию первых беспилотных авто начались уже в 20-х годах прошлого века, а первые испытания – в 50-х. Первый полуавтоматический автомобиль, для которого требовались специально обозначенные улицы, был разработан в 1977 году японской машиностроительной лабораторией из научного городка Цукуба. На транспорте были установлены две камеры, информация с которых интерпретировалась аналоговым компьютером. Автомобиль развил скорость до 30 км/час.
Первый автономный автомобиль создан в США в 1984 – это были проекты Navlab и ALV (проект автономного наземного транспортного средства), разработанные Университетом Карнеги-Меллон и финансируемые Агентством перспективных исследовательских проектов Департамента обороны США (нынешний DARPA). В 1987 Mercedes-Benz и Университет Бундесвера в Мюнхене обнародовали проект EUREKA Prometheus.
В 1991 году США выделили $ 650 млн на исследования в области Национальной автоматизированной системы автомагистралей, где автономное вождение достигалось за счёт сочетания встроенной в инфраструктуру шоссе автоматизации с беспилотной технологией в транспортных средствах. Программа завершилась успешной демонстрацией в 1997 году, однако без чёткого руководства и финансирования внедрения системы.
Важная веха была достигнута в 1995 году, когда NavLab 5 совершил первую автономную поездку от побережья до побережья США со средней скоростью 102,7 км/ч. Из 4585 км между Питтсбургом, штат Пенсильвания и Сан-Диего, штат Калифорния, 4501 км были автономными (98,2%). Толчок развитию полностью автономных транспортных средств дала серия технологических конкурсов по соревнованию автомобилей-роботов от DARPA Grand Challenge (финансируемых DARPA, армией и военно-морским флотом США с 1960 по 2005). Это привело к постепенному прогрессу в скорости беспилотников, навыкам автономного вождения в более сложных условиях, развитию средств управления и сенсорных систем. Компании и исследовательские организации с удовольствием разрабатывали прототипы.
Navlab с 1 по 5 модели
В этом же 1995 британский проект Ultra совместно с Бристольским университетом начал разработку оптимального решения городского транспорта для 21-го века. В 2005 году Ultra выиграла контракт на создание системы беспилотных автобусов в лондонском аэропорту Хитроу.
В 2014 году Американская ассоциация автомобильных инженеров (англ. Society of Automotive Engineers, SAE) разработала классификацию автоматизации автомобилей, которая состоит из шести уровней автономности (подробнее здесь):
Рекордное достижение Navlab 1995 года оставалось непревзойдённым 20 лет до 2015 года, когда компания Delphi вывела на дорогу беспилотную Audi, дополненную своей технологией, которая на протяжении 5472 километров оставалась в режиме самостоятельного вождения в 99% случаев. В 2015 году в нескольких штатах США были разрешены испытания автоматических автомобилей на дорогах общего пользования. В июле этого же года сингапурский Институт науки, технологий и исследований A*STAR обнародовал самоходное транспортное средство. Правительство одобрило проведение испытаний на дорогах общего пользования и на беспилотнике провезли несколько высокопоставленных лиц.
С 2016 по 2018 Европейская комиссия финансировала разработку инновационной стратегии для автоматизированного вождения через координацию CARTRE и SCOUT.
С 2016 компания Tesla, производящая электроавтомобили, стала оснащать функцией “Автопилот” некоторые модели, позже – все. Однако юридически с этим есть проблемы.
В ноябре 2017 года компания Waymo объявила, что начала тестировать свои полностью беспилотные автомобили, однако в машине все ещё был сотрудник. В октябре 2018 её испытательные машины прошли в автоматическом режиме более 16 млн км и это расстояние увеличивается примерно на 1,6 млн км в месяц. В декабре 2018 Waymo стала первой компанией, которая начала коммерциализацию полностью автономной службы такси в США.
В 2019 была опубликована Дорожная карта стратегических транспортных исследований и инноваций (STRIA) для подключенного и автоматизированного транспорта.
В 2020 году председатель Национального совета по безопасности на транспорте пояснил, что в 2020 году в США не будет легкового автомобиля. Это “решение” было вынесено после анализа аварии в 2018 с участием автомобиля Tesla: “Эта трагическая авария наглядно демонстрирует ограниченность современных систем помощи водителю, доступных сегодня для потребителей”. Подробнее здесь.
Какие крупные технологические компании активно работают сегодня над автономным вождением
- Google (США) cоздала проект автопилотирования Waymo. (Россия) тестируют беспилотный автомобиль для сервиса Яндекс.Такси
- IBM (США), которая не славилась разработками в области automotive, тоже пошла в беспилотный транспорт, создав совместно с Local Motors автономный микроавтобус Olli.
- Intel (США) купила израильскую компанию MobilEye, которая занимается созданием ИИ для транспорта.
- Tesla (США) внедрила Autopilot.
- General Motors (США) купила стартап Cruise и начала работать над созданием автономной службы такси в Сан-Франциско.
- Ford (США) купила Argo для разработки автономной службы такси в Майами и Вашингтоне.
- Volkswagen (Германия) и Hyundai (Южная Корея) заключили сделку со стартапом Aurora для разработки полностью автономных служб такси. (США) снова тестирует беспилотники и заключила сотрудничество с Toyota для создания системы безопасности.
- Cognitive Pilot проект C-Pilot.
Четыре модуля централизованной архитектуры C-Pilot
Законодательство – основная проблема, препятствующая массовому распространению беспилотных технологий. Коротко: в сфере российского законодательства не решено ни одной задачи и никакой системной работы в этой области не ведётся. В Европе тоже есть сложности в этом вопросе: например, Венская конвенция о дорожном движении гласит, что в каждом автомобиле должен быть водитель, который обязан управлять транспортным средством (подробнее здесь).
Хотя, некоторые подвижки в России таки есть. В ноябре 2018 российское правительство приняло постановление, разрешающее проведение испытаний беспилотников на дорогах общественного пользования в Москве и Татарстане в период с декабря 2018 по март 2022 для проверки возможности их эксплуатации и разработки технических требований. Продолжение следует?
Сегодня главный тренд автомобильной промышленности – беспилотники. Причем это касается не только производителей легковушек, но также грузовиков и даже мотоциклов. Нас уверяют, что в недалеком будущем именно такие транспортные средства будут господствовать на дорогах по всему миру. В том числе – и в России.
Скорее всего, мало кто сумеет правильно предположить, когда начались первые попытки заменить человека автоматикой. Это случилось почти век назад! Понятное дело, что тогда подобные идеи были научной фантастикой: автомобиль сам по себе только-только перешел из разряда экзотики в обыденное явление.
Правда, в реальности это был скорее не автомобиль с автопилотом, а полномасштабная радиоуправляемая модель. Изобретатель лично контролировал перемещения своего детища из второй машины, двигавшейся следом. Выдавала суть конструкции огромная антенна, установленная позади переднего дивана, однако на этот нюанс тогда никто не обратил внимания. Практического применения изобретение так и не получило, ведь оно на десятилетия опередило время. Проигнорировали новатора и сами автоконцерны.
Проект получил большую поддержку. На территории США даже построили несколько полигонов для углубленных тестов. Но в серию изобретение не пошло.
Первый действительно умный автомобиль построил в 1980 году инженер Эрнст Дикманс. Он собрал в Германии группу изобретателей, которые сумели сконструировать на базе фургона Mercedes-Benz Vario беспилотник, который мог придерживаться заданного направления движения, перестраиваться и совершать повороты без участия человека. Носитель выбрали неслучайно: вместительный кузов коммерческой модели позволил разместить весь набор необходимого оборудования. Компьютеры тогда были совсем не такими компактными, как сейчас.
Сегодня многие автомобили умеют самостоятельно набирать скорость и тормозить, электроника контролирует рядность движения и следит за знаками. Особо продвинутые модели умеют даже сами находить место на стоянке и парковаться. Но полностью передать управление роботу пока нельзя из-за отсутствия законодательной базы. Проще говоря, непонятно, кто будет виноват в случае аварии и вообще любого дорожного происшествия. Но и этот вопрос должен быть решен в ближайшее время, что откроет беспилотникам путь на дороги общего пользования.
Измеритель диаметра, измеритель эксцентриситета, автоматизация, ГИС, моделирование, разработка программного обеспечения и электроники, БИМ


На фото: General motors Firebird II – первый автомобиль в мире с системой круиз-контроля. Пасхальное воскресенье 1900 года, на фотографии — Пятая авеню, Нью-Йорк. Среди моря конных экипажей едва ли в левой полосе можно разглядеть единственный автомобиль. Пройдет всего 13 лет, и мы увидим аналогичную фотографию, с той разницей лишь, что среди многочисленных автомобилей будет ехать всего одна повозка, запряженная лошадьми. В настоящий момент автомобильная промышленность переживает одновременно три революции: электрификацию трансмиссии, подключение пассажирских транспортных средств к единой сети и замену водителей автономными системами вождения. Эти процессы не только идут параллельно, но и в значительной мере влияют на автомобилестроение, подобно тому, как в свое время революция подтолкнула заменить конные повозки на самоходный транспорт. Это первая часть короткой серии блогов, в которой делается попытка охватить историю беспилотников, от задумки до производства. Изобретения в области авионики и радиотехники вдохновили создание первых автоматизированных уличных транспортных средств: в 1914 году во Франции был продемонстрирован первый автопилот самолета на гироскопическом стабилизаторе:


Первый автопилот на биплане.
В 1920-х появилось радиоуправление для кораблей:
Радиоуправляемый автомобиль был впервые представлен компанией RCA в октябре 1921 года в Дейтоне, штат Огайо.

Управление трехколесным транспортным средством осуществлялось беспроводным путем с радиотехнического оборудования на другом автомобиле. Аналогичный радиоуправляемый автомобиль был продемонстрирован в 1925 году на Пятой авеню в Нью-Йорке. За беспилотной машиной вплотную следовал второй автомобиль, в котором находились радиопередатчики и оператор.
Фантазия о беспилотном транспорте почти также стара, как и сам дебют первого автомобиля. А все началось с обыкновенного вымысла.

В 1918 году в одном журнале уже был нарисован трамвай, не управляемый водителем, с подписью: “мечта автомобилиста: автомобиль, который управляется набором кнопок.” В статье говорилось, что “… в будущем автомобиль с рулевым колесом также устареет, как сегодня устарел автомобиль с ручным насосом для газа или масла!”

На Всемирной выставке 1939 года в Нью-Йорке General Motors в экспозиции Futurama представил посетителям свое видение 1960 года: автоматизированные транспортные средства на многополосных автомагистралях. Это случилось за 17 лет до того, как Федеральный закон о многополосных автострадах разрешил строительство сети межштатных автомагистралей протяженностью 41 000 миль по всей территории США.
В 1956 году американские энергокомпании рекламировали, что «в один прекрасный день ваш автомобиль сможет мчаться по электрическому супер-шоссе, его скорость и руление будут автоматически контролироваться электронными устройствами, встроенными в дорогу. Автомобильные дороги станут безопасными благодаря электричеству! Никаких пробок… никаких аварий… никакой усталости водителя.”

Firebird III на выставке “Century 21 Exposition”, Сиэтл, 1962 год. Автомобиль должен был управляться с помощью дорожного кабеля, а взаимодействие с инфраструктурой контролировало бы боковое движение.
Firebird IV был не функциональным транспортным средством, как его предшественники, а концепцией, ориентированной на тот день, когда автомобили будут ехать по шоссе и управляться не водителем, а автоматически программируемыми системами наведения, которые обеспечат абсолютную безопасность при развитии скорости более чем в 2 раза от разрешенной сегодня. Как только автомобиль выедет с шоссе, контроль будет передан водителю, и уже он будет вести машину по улицам.
Уолт Дисней вывел воображение на новый уровень.
Возможно, самым способным вымышленным роботом-автомобилем в 1980-е годы был KITT из телесериала Knight Rider.
Эпоха беспилотных автомобилей началась 100 лет назад. Вдохновленные достижениями в области гироскопических стабилизаторов, радио-и радиолокационных технологий, журналы, газеты и фильмы рисуют автомобили, которые могли бы управлять собой сами. Многие из этих источников ожидали появление технологий примерно через 20 лет, (распространенная временная константа в истории автоматизированных транспортных средств). В то время как изучение беспилотных технологий началось в конце 1950-х — о них речь пойдет в следующей части — потребовалось еще 50 лет, чтобы преодолеть загадочный 20-летний барьер.
Исследования по созданию беспилотного или роботизированного транспорта начались в конце 1950-х годов. Джеймсон Ветмор подробно описывает 60-летнюю историю создания автоматизированных систем автомобильных дорог в Америке и идеи, лежащие в их основе. Прочитать можно здесь и здесь. В 1958 году General Motors и компания Radio Corporation of America (RCA) совместно проводили испытания автоматизированных прототипов дорог, оснащенных радиоуправляемым контролем скорости и руления автомобиля.


Впервые сконструированная около 1960-го, Stanford Cart была предназначена для изучения возможности управления луноходом с Земли. В течение последующих десятилетий группа аспирантов дорабатывала карт. Главное усовершенствование внес Ханс Моравек. Он оснастил карт стереозрением, которое позволило ему самостоятельно перемещаться по заполненной стульями комнате — ушло на это всего 5 часов — 1979 год.

Первый автоматизированный автомобиль с восприятием окружающей среды был разработан в 1977 году в лаборатории машиностроения Университета Цукуба. Исследовательская группа занималась разработкой беспилотных транспортных средств на протяжении 20 лет. В этом документе 1994 года говорится о транспортном средстве, сконструированном компанией Toyota. С помощью одной камеры машина была способна проехать по разметке 50 м со скоростью 50 км/ч.
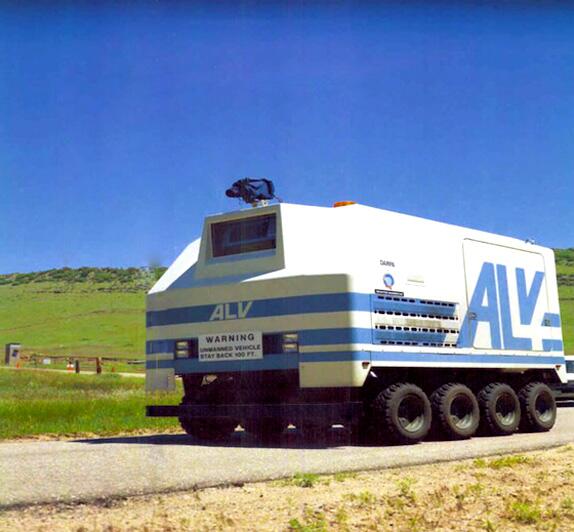
Разработанный в 1980-х годах автономный наземный автомобиль DARPA (ALV) представлял собой восьмиколесного робота высотой 12 футов с несколькими датчиками, перед которым была поставлена задача пройти от точки A до точки B, поднимаясь по холмам без помощи человека. Эксперимент проходил за пределами Денвера в 1985 году.

Тогда было установлено, что «осмысленное соединение глобальной цифровой карты с локальной сенсорной информацией — ключ к целенаправленному автономному вождению.”
Финальная демонстрация проекта „Прометей“ состоялась на парижской трассе A1, где автомобиль VAmP профессора Дикманнса проехал более 1000 км, развив скорость до 130 км/ч.
Он автоматически пропускал более медленные автомобили в левом ряду и одновременно отслеживал до двенадцати других автомобилей. В 1995 году команда проехала 1758 км от Мюнхена до Дании и обратно со скоростью до 175 км/ч, продольное и боковое управление осуществлялось с помощью компьютерного зрения. Самый большой участок, который удалось проехать в режиме автопилота, составил 158 км. Профессор Дикманс рассказывает о развитии технологий в этой области начиная с 1950-х годов и по настоящий момент на конференции в 2011 году.
Также в 1995 году разработанная в CMU машина Navlab 5 проехала на автопилоте, но с ручным контролем бокового движения, из Питтсбурга, штат Пенсильвания, в Сан-Диего, штат Калифорния, в рамках тура “No Hands Across America”. В этом видео с History Channel 1998 года кратко рассказывается о деятельности CMU Navlab в 1990-е годы:
В 1996 году в Италии, в университете Пармы, Альберто Броджи основал проект ARGO. В 1998 году автомобиль MilleMiglia в рамках тура Automatico проехал в режиме автопилота 2000 км. Отчет команда опубликовала в этом видео 10 лет спустя.
В 1997 году Национальная программа исследования автоматизированных автомобильных систем (NAHS) Министерства транспорта США завершилась тем, что беспилотные автомобили, автобусы и грузовики проехали по трассе I-15 в Сан-Диего, Калифорния.

Контроль за боковым движением осуществлялся с помощью компьютерного зрения и магнитов, встроенных в дорогу. Расстояние между автомобилями регулировали радиолокационные или лидарные датчики.

В рамках проекта на испытательных площадках Volkswagen проводились тест-драйвы производимых автомобилей. Машины были оснащены лидарами, камерами, радарами, GPS, цифровой маршрутной картой.

Чтобы тестируемые машины могли ездить без водителя-испытателя по замкнутому маршруту в смешанном движении среди другого транспорта, в них посадили электромеханических роботов-водителей, которые приводили в действие три педали, переключали передачи и управляли рулевым колесом.

Учитывая назначенный жесткий график, DARPA решило, что соревнование с призовым фондом станет быстрым экономическим выходом и лучшим стимулом для развития инноваций и расширения исследовательского сообщества беспилотных технологий. Первое мероприятие состоялось в 2004 году. Только 15 команд прошли отбор для участия в финальном заезде. Беспилотные самоуправляемые машины попытались пройти по 142-мильному маршруту через пустыню Мохаве (штат Невада), по грунтовым дорогам, равнинам и горным перевалам.
Команды только за 24 часа до начала мероприятия узнали GPS путевых точек. Машина CMU преуспела больше всех, проехав 7,32 мили (менее 5% от всего маршрута). Тем не менее, как правильно заметил Wired, первое из трех соревнований Grand Challenge сформировало сообщество разработчиков беспилотников таким, каким мы его знаем сейчас.
DARPA провела повторное соревнование в 2005 году (DARPA Grand Challenge). Пять команд прошли дистанцию в 132 мили, и все, кроме одного из 23 финалистов, преодолели дистанцию в 7,32 мили — обогнав лучший результат 2004 года.
Робот-автомобиль Stanley, разработанный Себастьяном Труном и его командой из Стэнфордского университета, прибыл на финиш первым, пройдя маршрут за 6 часов 54 минуты. Позже Себастьян рассказал о своей работе в Стэнфорде над Stanley в этой статье и в этой беседе:
Две машины, разработанные в Университете Карнеги-Меллона, Sandstorm и Highlander, прибыли всего через несколько минут после Стэнли. Двенадцать лет спустя команда случайно обнаружит, что фильтр между модулем управления двигателем и топливными форсунками (одной из всего лишь двух электронных частей в двигателе Hummer 1986 года) был сломан и привел к потере мощности двигателя.
Соревнование DARPA Urban Challenge 2007 года DARPA перенесла в городскую местность, на место ныне закрытой военно-воздушной базы Джорджа в Викторвилле, штат Калифорния. Команды должны были пройти маршрут по городу, проезжая через четырехполосные перекрестки, заблокированные дороги или парковки, находясь в смешанном движении с беспилотниками и машинами, управляемыми людьми. Более 90 команд подали заявки на участие в Urban Challenge. 53 команды приняло участие в отборе, 36 были приглашены на полуфинальное мероприятие, и всего 11 приняло участие в финальной гонке.
DARPA сочла необходимым, чтобы в потоке машин рядом с роботами находились люди и представители DARPA, оценивающие производительность роботов. Впервые на мероприятие образовалась пробка из беспилотных автомобилей, а также первое, хоть и незначительное, столкновение двух беспилотников.

Junior Стэнфордского университета и Victor Tango Политехнического университета Виргинии на соревновании DARPA Urban Challenge 2007-го года.

Автомобиль Boss Университета Карнеги-Меллона пересекает финишную черту.
После Urban Challenge проводились ещё несколько, в основном научно-исследовательских, мероприятий. Среди них проект Stadtpilot в Техническом университете Брауншвейг, нацеленный на вождение в городской среде, включая смену полосы движения, парковку и включение в движущийся поток. В 2010 году проект Vislab Intercontinental Autonomous Challenge, в котором колонна из четырех беспилотников, следуя за ведущим автомобилем, проехала 13000 км из Пармы (Италия) до Шанхая (Китай). В 2012 для гонки Pikes Peak в Стэнфорде построили гоночный беспилотник.
Grand Cooperative Driving Challenge – соревнование, проводимое в Европе в 2011 и 2016 годах, в котором машины должны были следовать за лидирующим автомобилем, реагировать на его колебания, совместно стартовать на светофорах и объединяться в колонну.
Соревнование Urban Challenge ознаменовало переход от научных исследований к промышленному развитию — которое мы будем освещать в следующей части. Загадочный 20-ти летний барьер был окончательно преодолен.
Понравилась статья? Тогда поддержите нас, поделитесь с друзьями и заглядывайте по рекламным ссылкам!

Читайте также: