
Кинематика техническая механика конспект
Обновлено: 06.07.2024
Теоретическая механика – это раздел механики, в котором излагаются основные законы механического движения и механического взаимодействия материальных тел.
Теоретическая механика является наукой, в которой изучаются перемещения тел с течением времени (механические движения). Она служит базой других разделов механики (теория упругости, сопротивление материалов, теория пластичности, теория механизмов и машин, гидроаэродинамика) и многих технических дисциплин.
Механическое движение — это изменение с течением времени взаимного положения в пространстве материальных тел.
Механическое взаимодействие – это такое взаимодействие, в результате которого изменяется механическое движение или изменяется взаимное положение частей тела.
Статика твердого тела
Статика — это раздел теоретической механики, в котором рассматриваются задачи на равновесие твердых тел и преобразования одной системы сил в другую, ей эквивалентную.
-
Основные понятия и законы статики
Кинематика
Кинематика — раздел теоретической механики, в котором рассматриваются общие геометрические свойства механического движения, как процесса, происходящего в пространстве и во времени. Движущиеся объекты рассматривают как геометрические точки или геометрические тела.
Динамика
Динамика — это раздел теоретической механики, в котором изучаются механические движении материальных тел в зависимости от причин, их вызывающих.
Примеры решения задач
Пример 1. Условия равновесия
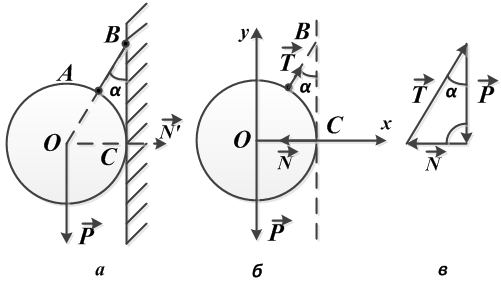
Висящий на нити, под углом в сорок пять градусов к гладкой стене шар весом в десять Ньютон, находится в состоянии равновесия (рис. а). Необходимо определить давление однородного шара на гладкую стенку и натяжение нити.
Дано: P = 10 Н; α = 45°
Найти: N, T — ?
Решение.
Отбрасываем связи, а их действие на шар заменяем реакциями.
Реакция стенки N направлена перпендикулярно стенке (от точки касания С к центру шара О), реакция нити Т — вдоль нити от точки А к точке В.
Тем самым выявляется полная система сил, приложенных к покоящемуся шару.
Это система сил, сходящихся в центре О шара, и состоящая из веса шара Р (активная сила), реакции стенки N и реакции нити Т (рис. б).
Реакции N и Т по величине неизвестны. Для их определения следует воспользоваться условиями равновесия (в той или иной форме — геометрической, аналитической).
При геометрическом способе решения строится замкнутый многоугольник сил и используются соотношения школьной геометрии (теорема синусов, теорема косинусов, теорема Пифагора и т.д.).

.

Ответ: .
Пример 2. Уравнение траектории точки

;
(x, у — в сантиметрах, t — в секундах).
Найти: уравнение траектории точки в координатной форме.
Решение. Для определения уравнения траектории из уравнений движения исключаем время t. Для этого из первого уравнения выражаем и подставляем это значение во второе уравнение, преобразованное к функциям одинарного угла:
=4(^2-^2)=4(1-2^2)=4(1-2/4>)=4-2" />
.

Опуская промежуточные выражения, получаем уравнение траектории:
.
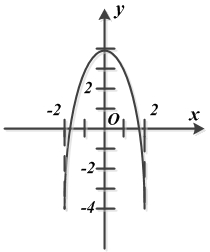
Уравнение определяет параболу, расположенную симметрично относительно оси у, с вершиной в точке (0, 4). Траекторией служит кусок этой параболы, заключенный между точками с координатами (-2, -4) и (2, -4).
Ответ: .
Пример 3. Основной закон динамики точки
Свободная материальная точка, масса которой десять килограмм, движется прямолинейно с ускорением пол метра в секунду в квадрате. Определить силу, приложенную к точке.
Дано: m = 10 кг; a = 0,5 м/с 2 .
Найти: F — ?

Решение.
Согласно основному закону динамики: .

Подставив значения в формулу, получим:
Ответ: сила, сообщающая массе, равной 10 кг,
ускорение 0,5 м/с 2 , равна 5 Н.
В помощь студенту
-
Формулы, правила, законы, теоремы, уравнения, примеры решения задач
Список литературы:
Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. Теоретическая механика в примерах и задачах.
Буторин Л.В., Бусыгина Е.Б. Теоретическая механика. Учебно-практическое пособие.
В кинематике изучают зависимости между пространственно-временными характеристиками механического движения. Поэтому кинематику называют также геометрией движения.
Основной задачей кинематики является нахождение положения тела в любой момент времени, если известны его положение, скорость и ускорение в начальный момент времени.
Механическое движение - это изменение положения тел (или частей тела) относительно друг друга в пространстве с течением времени.
Для определения положения движущегося тела (или точки) в разные моменты времени с телом, по отношению к которому изучается движение, жестко связывают какую-нибудь систему координат, образующую вместе с этим телом систему отсчета.
Тело отсчета - тело (или группа тел), принимаемое в данном случае за неподвижное, относительно которого рассматривается движение других тел.
Система отсчета - это система координат, связанная с телом отсчета, и выбранный способ измерения времени (рис. 1).
Рис.1. Система отчета
Изображать систему отсчета будем в виде трех координатных осей (не показывая тело, с которым они связаны).
Движение тел совершается в пространстве с течением времени. Пространство в механике мы рассматриваем, как трехмерное евклидово пространство.
Время является скалярной, непрерывно изменяющейся величиной. В задачах кинематики время t принимают за независимое переменное (аргумент). Все другие переменные величины (расстояния, скорости и т. д.) рассматриваются как изменяющиеся с течением времени, т.е. как функции времени t.
В теоретической механике при измерении пространства за основную единицу длины принимают метр (м), а за основную единицу времени — секунду (с). Время предполагается одинаковым в любых системах отсчета (системах координат) и не зависимым от движения этих систем относительно друг друга. Время обозначается буквой и рассматривается как непрерывно изменяющаяся величина, принимаемая в качестве аргумента.
При измерении времени в кинематике различают такие понятия, как промежуток времени, момент времени, начальный момент времени.
Промежутком времени называется время, протекающее между двумя физическими явлениями. Моментом времени называют границу между двумя смежными промежутками времени. Начальным моментом называется время, с которого начинают отсчет времени.
Для решения задач кинематики надо, чтобы изучаемое движение было как-то задано (описано).
Кинематически задать движение или закон движения тела (точки) - значит задать положение этого тела (точки) относительно данной системы отсчета в любой момент времени.
Основная задача кинематики точки твердого тела состоит в том, чтобы, зная закон движения точки (тела), установить методы определения всех кинематических величин, характеризующих данное движение.
Положение тела можно определить с помощью радиус-вектора или с помощью координат.
Радиус-вектор точки М - направленный отрезок прямой, соединяющий начало отсчета О с точкой М (рис. 2).
Координата х точки М - это проекция конца радиуса-вектора точки М на ось Ох. Обычно пользуются прямоугольной системой координат Декарта. В этом случае положение точки М на линии, плоскости и в пространстве определяют соответственно одним (х), двумя (х, у) и тремя (х, у, z) числами - координатами (рис. 3).
Рис.2. Радиус-вектор
Рис.3. Координаты точки М
Материальная точка - тело, размерами которого в данных условиях можно пренебречь.
Этой моделью пользуются в тех случаях, когда линейные размеры рассматриваемых тел много меньше всех прочих расстояний в данной задаче или когда тело движется поступательно.
Основной задачей кинематики точки является изучение законов движения точки. Зависимость между произвольными положениями движущейся точки в пространстве и времени определяет закон ее движения. Закон движения точки считают известным, если можно определить положение точки в пространстве в произвольный момент времени. Положение точки рассматривается по отношению к выбранной системе координат.
Поступательным называется движение тела, при котором прямая, проходящая через любые две точки тела, перемещается, оставаясь параллельной самой себе. При поступательном движении все точки тела описывают одинаковые траектории и в любой момент времени имеют одинаковые скорости и ускорения. Поэтому для описания такого движения тела достаточно описать движение его одной произвольной точки.
В дальнейшем под словом "тело" будем понимать "материальная точка".
Линия, которую описывает движущееся тело в определенной системе отсчета, называется траекторией. Вид траектории зависит от выбора системы отсчета.
В зависимости от вида траектории различают прямолинейное и криволинейное движение.
Путь s - скалярная физическая величина, определяемая длиной траектории, описанной телом за некоторый промежуток времени. Путь всегда положителен: s> 0.Единицы измерения в системе СИ: м (метр).
Перемещение тела за определенный промежуток времени - направленный отрезок прямой, соединяющий начальное (точка М0) и конечное (точка М) положение тела (см. рис. 2):
где и — радиус-векторы тела в эти моменты времени.Единицы измерения в системе СИ: м (метр).
Проекция перемещения на ось Ох: ∆rx =∆х = х-х0, где x0 и x - координаты тела в начальный и конечный моменты времени.
Модуль перемещения не может быть больше пути: ≤s.
Знак равенства относится к случаю прямолинейного движения, если направление движения не изменяется.
Зная перемещение и начальное положение тела, можно найти его положение в момент времени t:
Видео-урок "Механическое движение"
§2. Способы задания движения точки
Для задания движения точки можно применять один из следующих трех способов:
1) векторный, 2) координатный, 3) естественный.
1. Векторный способ задания движения точки.
Пусть точка М движется по отношению к некоторой системе отсчета Oxyz. Положение этой точки в любой момент времени можно определить, задав ее радиус-вектор , проведенный из начала координат О в точку М (рис. 4).
Рис.4. Движение точки М
При движении точки М вектор будет с течением времени изменяться и по модулю, и по направлению. Следовательно, является переменным вектором (вектором-функцией), зависящим от аргумента t:

Равенство определяет закон движения точки в векторной форме, так как оно позволяет в любой момент времени построить соответствующий вектор и найти положение движущейся точки.
Геометрическое место концов вектора , т.е. годограф этого вектора, определяет траекторию движущейся точки.
2. Координатный способ задания движения точки.
Положение точки можно непосредственно определять ее декартовыми координатами х, у, z (рис.4), которые при движении точки будут с течением времени изменяться. Чтобы знать закон движения точки, т.е. ее положение в пространстве в любой момент времени, надо знать значения координат точки для каждого момента времени, т.е. знать зависимости
Уравнения представляют собой уравнения движения точки в прямоугольных декартовых координатах. Они определяют закон движения точки при координатном способе задания движения.
3. Естественный способ задания движения точки.
Рис.5. Движение точки М
Естественным способом задания движения удобно пользоваться в тех случаях, когда траектория движущейся точки известна заранее. Пусть кривая АВ является траекторией точки М при ее движении относительно системы отсчета Oxyz (рис.5) Выберем на этой траектории какую-нибудь неподвижную точку О', которую примем за начало отсчета, и установим на траектории положительное и отрицательное направления отсчета (как на координатной оси).
Тогда положение точки М на траектории будет однозначно определяться криволинейной координатой s, которая равна расстоянию от точки О’ до точки М, измеренному вдоль дуги траектории и взятому с соответствующим знаком. При движении точка М перемещается в положения M1, М2. . следовательно, расстояние s будет с течением времени изменяться.
Чтобы знать положение точки М на траектории в любой момент времени, надо знать зависимость s=f(t).
§3. Вектор скорости точки
Одной из основных кинематических характеристик движения точки является векторная величина, называемая скоростью точки. Понятие скорости точки в равномерном прямолинейном движении относится к числу элементарных понятий.
Скорость - мера механического состояния тела. Она характеризует быстроту изменения положения тела относительно данной системы отсчета и является векторной физической величиной.
Единица измерения скорости – м/с. Часто используют и другие единицы, например, км/ч: 1 км/час=1/3,6 м/с.
Движение точки называется равномерным, если приращения радиуса-вектора точки за одинаковые промежутки времени равны между собой. Если при этом траекторией точки является прямая, то движение точки называется прямолинейным.
Для равномерно-прямолинейного движения ∆r=v∆t, где v – постоянный вектор скорости.
Из соотношения видно, что скорость прямолинейного и равномерного движения является физической величиной, определяющей перемещение точки за единицу времени.
16. Кинематика точки. Способы задания движения точки (векторный и координатный)
Кинематика изучает простейшую форму движения – механическое движение. Кинематически определить движение тела – это значит указать его положение относительно выбранной системы отсчета в каждый момент времени.
Движение материальной точки (в дальнейшем будем говорить просто точки) задано, если известен закон движения.
Закон движения. Закон движения – это уравнение, позволяющее определить положение точки относительно выбранной системы отсчета в любой момент времени.
Основная задача кинематики точки. По известному закону движения определить траекторию движения точки, ее положение на траектории, скорость и ускорение точки в ее положении на траектории.
Способы задания движения точки
В зависимости от выбора системы отсчета существуют три способа задания движения точки – векторный, координатный и естественный. Рассмотрим эти способы задания движения в отдельности.
Векторный способ задания движения точки
Пусть точка движется вдоль некоторой линии. В качестве начала отсчета выберем произвольный центр . Положение точки на линии определяется радиус-вектором (рис.К.9).

Таким образом, вектор определяет положение движущейся точки в любой момент времени. Следовательно, уравнение является законом движения при векторном способе задания движения.
Величина называется вектором скорости точки. Вектор скорости точки всегда направлен по касательной к годографу (траектории движения точки) в сторону перемещения точки.
Величина называется вектором ускорения точки.
Определим направление вектора . Направление вектора определяется направлением вектора . Пусть точка движется по некоторой траектории (рис.К.10) от точки к точке . Пусть скорость в точке равна , а скорость в точке равна . Перенесем вектор параллельно самому себе из точки в точку .

Как показано на рис.К.10, вектор направлен в сторону вогнутости траектории движения точки, следовательно и вектор ускорения всегда направлен в ту же сторону, то есть в сторону вогнутости траектории движения точки.
Координатный способ задания движения точки
Пусть точка движется вдоль некоторой линии. В качестве системы отсчета выберем декартовую систему координат с началом в произвольном центре . Тогда положение точки на линии определяются текущими координатами в любой момент времени

Следовательно, система уравнений определяют закон движения точки при координатном способе задания движения. Исключая из закона движения время , получим уравнение вида , являющееся уравнением траектории движения точки.
Пример. Закон движения записывается уравнениями . Найти уравнение траектории движения точки.
Решение. Из первого уравнения следует, что или . Тогда из второго уравнения . Или . Таким образом получено, что траекторией движения точки является прямая линия .
Компоненты скорости и ускорения движущейся точки в любой момент времени определяются по формулам
- Для учеников 1-11 классов и дошкольников
- Бесплатные сертификаты учителям и участникам
ТЕМА 1.1 Кинематика
Основные понятия кинематики
МЕХАНИКА — раздел физики, который изучает механическое движение и причины, вызывающие это движение, а так же взаимодействие тел.
МЕХАНИЧЕСКОЕ ДВИЖЕНИЕ — изменение во времени и пространстве расположения тел или их частей относительно друг друга.
КИНЕМАТИКА – раздел механики, изучающий механическое движение тел без учета причин, вызывающих это движение.
МАТЕРИАЛЬНАЯ ТОЧКА — тело, формой и размерами которого в условиях данной задачи можно пренебречь.
СИСТЕМОЙ ОТСЧЕТА назовем совокупность системы координат и часов.
Движение тела связано с его перемещением в пространстве.

Положение материальной точки на плоскости в некоторый момент времени в декартовой системе координат задается радиус-вектором .
ТРАЕКТОРИЯ – линия, которую материальная точка описывает в пространстве при движении.
ПРОЙДЕННЫЙ ПУТЬ (длина пути) s – длина участка траектории, пройденного за определенный промежуток времени.
ПЕРЕМЕЩЕНИЕ – вектор, соединяющий начальное и конечное положение тела.
2) Поступательное и вращательное движение
ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ — это движение, при котором любая прямая, связанная с телом, остается параллельной первоначальному положению.
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ — это движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной прямой, называемой осью вращения.
СКОРОСТЬ — векторная величина, определяющая быстроту движения и направление в определенный момент времени.
Вектор средней скорости определяется так:
Скорость в определенный момент времени называется МГНОВЕННОЙ СКОРОСТЬЮ, которая направлена всегда по касательной к траектории.
УСКОРЕНИЕ — векторная величина, определяющая быстроту изменения скорости по модулю и направлению.
Среднее ускорение определяется так:
3) Равномерное прямолинейное движение
РАВНОМЕРНОЕ ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ – это движение, при котором тело, двигаясь вдоль одного направления, за равные промежутки времени совершает одинаковые перемещения, т.е. скорость тела остается неизменной.
Уравнение равномерного движения имеет вид:
По графику зависимости скорости от времени путь, пройденный телом за промежуток времени, определяется как площадь фигуры под кривой.
Рассмотрим движение тела относительно двух систем отсчета: системы координат, связанной с подвижной платформой, и системы координат, связанной с Землей. Пусть эти системы движутся друг относительно друга равномерно и прямолинейно.

КЛАССИЧЕСКИЙ ЗАКОН СЛОЖЕНИЯ СКОРОСТЕЙ: скорость тела относительно неподвижной системы отсчета равна скорости тела относительно подвижной системы отсчета плюс скорость самой подвижной системы:
ЗАМЕЧАНИЕ 1: Если относительное движение происходит в произвольном направлении, то закон сложения скоростей записывается для проекций.
ЗАМЕЧАНИЕ 2: Для двух тел, движущихся с определенными скоростями относительно неподвижной системы координат закон будет звучать так: скорость второго тела относительно первого равна разности скорости второго тела относительно неподвижной системы координат и скорости первого тела относительно неподвижной системы координат .
4) Равнопеременное прямолинейное движение.
РАВНОПЕРЕМЕННОЕ ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ – это движение с постоянным ускорением.
Движение тела с постоянным ускорением, при котором модуль скорости тела увеличивается со временем, называется равноускоренным , в противном случае равнозамедленным .
Радиус-вектор при таком движении определяется так:
ЗАМЕЧЕНИЕ: при решении задач указанные уравнения проецируются на необходимые оси координат.
5) Движение тела, брошенного вертикально вверх и под углом к горизонту.
СВОБОДНОЕ ПАДЕНИЕ – движение тела в безвоздушном пространстве только под действием гравитационных сил.
Движение тела, брошенного вертикально вверх, с некоторой начальной скоростью, происходит только вдоль оси Y . Поэтому уравнения зависимости координаты и скорости от времени в проекциях на ось Y имеют вид:
Рассмотрим движение тела, брошенного под углом к горизонту .

Соответствующие уравнения имеют вид:
Учитывая эти уравнения получаем:
Время подъема:
Максимальная высота подъема:
Дальность полета:
6) Движение материальной точки по окружности с постоянной по модулю скоростью
Пусть материальная точка двигаясь окружности перемещается из точки A в точку B .
При постоянном модуле скорости направление вектора стремится к центру, а значит и ускорение также направлено к центру. Это ускорение называю ЦЕНТРОСТРЕМИТЕЛЬНЫМ или НОРМАЛЬНЫМ:
ПЕРИОД ВРАЩЕНИЯ — время, в течение которого материальная точка проходит окружность.
ЧАСТОТА ВРАЩЕНИЯ — число оборотов материальной точки за 1 секунду.
Период и частота вращения связаны соотношением:
ЛИНЕЙНАЯ СКОРОСТЬ — величина, определяемая отношением длины дуги окружности ко времени, в течение которого эта дуга будет пройдена
УГЛОВАЯ СКОРОСТЬ — величина, определяемая отношением угла поворота тела ко времени, за которое произошел этот поворот, причем:
Зависимость угловой и линейной скорости:
где R – радиус окружности, по которой происходит движение.
Сила, с которой действует удерживающее тело (связь) на вращающееся тело, называется ЦЕНТРОСТРЕМИТЕЛЬНОЙ СИЛОЙ (эта сила приложена к вращающемуся телу и направлена по радиусу к центру вращения).
Сила, с которой действует вращающееся тело на удерживающее тело (связь), называется ЦЕНТРОБЕЖНОЙ СИЛОЙ (эта сила приложена к удерживающему телу и направлена по радиусу от центра вращения).
ЗАМЕЧАНИЕ: если тело движется неравномерно по произвольной траектории, то вектор полного ускорения представляется в виде суммы нормального и тангенциального ускорения (касательное ускорение):
Читайте также: