
Устройство управления это в информатике кратко
Обновлено: 13.05.2024
Свидетельство и скидка на обучение каждому участнику
Зарегистрироваться 15–17 марта 2022 г.
Устройство управления (УУ)
УУ – часть центрального процессора. Оно вырабатывает распределенную во времени и пространстве последовательность внутренних и внешних управляющих сигналов, обеспечивающих выборку и выполнение команд.
На этапе цикла выборки команды УУ интерпретирует команду, выбранную из программной памяти. На этапе выполнения команды в соответствии с типом реализуемой операции УУ формирует требуемый набор команд низкого уровня для арифметико-логического устройства и других устройств. Эти команды задают последовательность простейших низкоуровневых операций, таких, как пересылка данных, сдвиг данных, установка и анализ признаков, запоминание результатов и др. Такие элементарные низкоуровневые операции называют микрооперациями, а команды, формируемые устройством управления, называются микрокомандами.
Последовательность микрокоманд, соответствующая одной команде, называется микропрограммой.
В простейшем случае УУ имеет в своем составе три устройства:
регистр команды, который содержит код команды (КОП) во время ее выполнения;
программный счетчик, в котором содержится адрес очередной подлежащей выполнению команды;
регистр адреса, в котором вычисляются адреса операндов, находящихся в памяти.
09. Классификация, структуры, функции устройств управления
Устройство управления (УУ) — важнейшая часть ВМ, организующая автоматическое выполнение программ (путем реализации функций управления) и обеспечивающая функционирование ВМ как единой системы. Для пояснения функций УУ ВМ следует рассматривать как совокупность элементов, между которыми происходит пересылка информации, в ходе которой эта информация может подвергаться определенным видам обработки. Пересылка информации между любыми элементами ВМ инициируется своим сигналом управления (СУ), то есть управление вычислительным процессом сводится к выдаче нужного набора СУ в нужной временной последовательности. Основной функцией УУ является формирование управляющих сигналов, отвечающих за извлечение команд из памяти в порядке, определяемом программой, и последующее исполнение этих команд. Кроме того, УУ формирует СУ для синхронизации и координации внутренних и внешних устройств ВМ. Генерируемая управляющим устройством последовательность управляющих сигналов задается поступающими на входы устройства кодом операции, сигналами из операционного блока, несущими информацию об особенностях операндов, промежуточных и конечного результатов операции, а также синхросигналами, задающими границы тактов.
Классифицировать УУ можно по различным признакам: по уровню централизации, по типам длительности тактов в УУ, по реализации хранения алгоритмов микроопераций.
По уровню централизации:
· Централизованные (УУ – один в ВМ)
· Децентрализованные (в каждом блоке – свой УУ)
· Смешанные (1+2 – конвейеров лучше)
По типам длительности тактов:
· Синхронизованные. Длительность такта = const .
· Асинхронные. И длительность такта и цикла – переменные. Это обеспечивает самое высокое быстродействие, но возникают сложности в настройке.
Для организации:
· Используют признак завершения операции.
· Группируют микрооперации – по признаку длительности (в каждой группе – свое время выполнения).
· Синхронно – асинхронные. Длительность такта = const , длительность цикла – переменная (из-за разного количества тактов)
Помимо кода операции при работе БУ используются флаги, т. е. признаки, характеризующие результаты выполнения предшествующей операции. Они необходимы для организации выполнения команд условного перехода. Блок управления вырабатывает сигналы при поступлении на него тактовых импульсов. Кроме того, он получает сигналы от системной шины, например запросы прерывания, подтверждения приема информации и т. п.
Блок управления формирует управляющие сигналы, направляемые в различные устройства и блоки компьютера, прежде всего в процессор. Эти сигналы служат для управления перемещением данных между регистрами, работой устройств, инициирования тех или иных функций. Сигналы управления направляются также в шину для передачи в блоки памяти и на устройства ввода-вывода.
Действия в операционном блоке в течение одного такта называются микрооперациями (МО), а любая операция или команда, выполняемая за несколько тактов, описывается некоторой микропрограммой, определяющей последовательность действий при выполнении этой команды. Сигналы управления, формируемые БУ и поступающие на входы операционного устройства, вызывают в нем выполнение микрооперации. Поскольку блоки управления формируют сигналы для выполнения микроопераций, их часто называют микропрограммными автоматами.
Второй тип управляющего автомата — автомат с хранимой в памяти логикой. Управление каждой операцией, входящей в систему команд компьютера, осуществляется с помощью хранимых в памяти слов. Эти управляющие слова, или микрокоманды, содержат информацию о микрооперациях, выполняемых в течение одного машинного такта и осуществляющих элементарное преобразование над данными, и указание, где находится следующая микрокоманда. Такое управление получило название микропрограммного.
Микропрограммы для каждой команды компьютера можно разместить в специальной памяти микропрограмм. Таким образом, процесс командного управления становится двухступенчатым: сначала нужно извлечь из основной памяти компьютера команду, а затем для ее выполнения извлечь из памяти микропрограмм последовательность микрокоманд. Для реализации такого двухступенчатого процесса требуется быстрая постоянная память довольно большого объема.
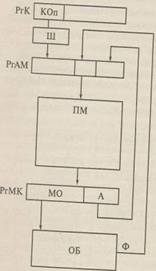
Основное место в типичной структуре устройства управления с хранимой в памяти логикой (рис. 5.9) занимает память микропрограмм (ПМ), в которой находятся все выполняемые микрокоманды. Она является постоянной памятью; адрес очередной микрокоманды (РгАМ) определяется кодом текущей операции (КОп из регистра команд преобразуется шифратором Ш), флагами Ф, полученными при выполнении предыдущей операции (из регистра флагов), и адресной частью предыдущей микрокоманды (А).Очередная МК считывается из памяти и заносится в регистр RG мк, откуда СУ МО поступают в ОБ.
Обобщенная структура управления
В обобщенной структуре УУ (рис. 6.3) можно выделить две части: управляющую и адресную. Управляющая часть УУ предназначена для координирования работы операци онного блока ВМ, адресной части устройства управления, основной памяти и дру гих узлов ВМ. Адресная часть УУ обеспечивает формирование адресов команд и исполнитель ных адресов операндов в основной памяти.
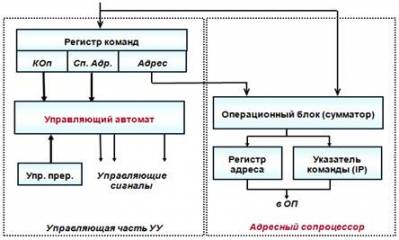
В состав управляющей части УУ входят:
* регистр команды (РК), состоящий из адресной (Адрес) и операционной (КОп, СА) частей; *микропрограммный автомат (МПА); * узел прерываний и приоритетов (УПП)
Регистр команды РК предназначен для приема очередной команды из запоминающего устройства. Микропрограммный автомат на основании результатов расшифровки операционной части команды (КОп, СА) вырабатывает определенную последовательность микрокоманд, вызывающих выполнение всех целевых функций УУ.
Узел прерываний и приоритетов позволяет реагировать на различные ситуации, связанные как с выполнением рабочих программ, так и с состоянием ВМ.
Адресная часть УУ включает в себя:
*операционный узел устройства управления (ОПУУ); *регистр адреса (РгА); *счетчик команд (СК).
Регистр адреса используется для хранения исполнительных адресов операндов, а счетчик команд — для выработки и хранения адресов команд. Содержимое РгА и СК посылается в регистр адреса основной памяти (ОП) для выборки операндов и команд соответственно.
ОПУУ, называемый иначе узлом индексной арифметики или узлом адресной арифметики, обрабатывает адресные части команд, формируя исполнительные адреса операндов, а также подготавливает адрес следующей команды при выпол
Аннотация: Рассматриваются принципы построения схемного и микропрограммного устройств управления. Даны различные схемы реализации датчика сигнала, входящего в состав УУ. Представлена микропрограмма для управления арифметико-логическим устройством, описанным в лекции 7.
Компьютер условно можно разделить на два основных блока: операционный и управляющий. Для реализации любой команды необходимо на соответствующие управляющие входы любого устройства компьютера подать определенным образом распределенную во времени последовательность управляющих сигналов. Часть цифрового вычислительного устройства, предназначенная для выработки этой последовательности, называется устройством управления .
Любое действие, выполняемое в операционном блоке, описывается некоторой микропрограммой и реализуется за один или несколько тактов. Элементарная функциональная операция, выполняемая за один тактовый интервал и приводимая в действие управляющим сигналом, называется микрооперацией [7]. Например, в спроектированном АЛУ для умножения чисел в первом такте выполняются следующие микрооперации : TX=0 , TY=0 , RGX=|X| , RGY=|Y| , RGZ=0 . Совокупность микроопераций , выполняемых в одном такте, называется микрокомандой (МК). Если все такты должны иметь одну и ту же длину, а именно это имеет место при работе компьютера, то она устанавливается по самой продолжительной микрооперации . Микрокоманды , предназначенные для выполнения некоторой функционально законченной последовательности действий, образуют микропрограмму . Например, микропрограмму образует набор микрокоманд для выполнения команды умножения.
Устройство управления предназначено для выработки управляющих сигналов, под воздействием которых происходит преобразование информации в арифметико-логическом устройстве, а также операции по записи и чтению информации в/из запоминающего устройства.
Устройства управления делятся на:
- УУ с жесткой, или схемной логикой и
- УУ с программируемой логикой ( микропрограммные УУ ).
В устройствах управления первого типа для каждой команды, задаваемой кодом операции , строится набор комбинационных схем , которые в нужных тактах вырабатывают необходимые управляющие сигналы.
В микропрограммных УУ каждой команде ставится в соответствие совокупность хранимых в специальной памяти слов - микрокоманд . Каждая из микрокоманд содержит информацию о микрооперациях , подлежащих выполнению в данном такте, и указание, какое слово должно быть выбрано из памяти в следующем такте.
Схемное устройство управления
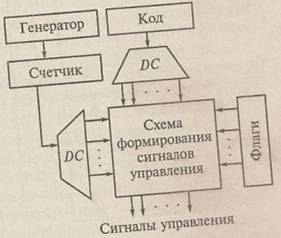
Устройство управления схемного типа (рис. 4.1) состоит из:
- датчика сигналов , вырабатывающего последовательность импульсов, равномерно распределенную во времени по своим шинам ( рис. 4.2) ( n - общее количество управляющих сигналов, необходимых для выполнения любой операции; m - количество тактов, за которое выполняется самая длинная операция);
- блока управления операциями, осуществляющего выработку управляющих сигналов, то есть коммутацию сигналов, поступающих с ДС, в соответствующем такте на нужную управляющую шину;
- дешифратора кода операций, который дешифрирует код операции команды, присутствующей в данный момент в регистре команд , и возбуждает одну шину, соответствующую данной операции; этот сигнал используется блоком управления операциями для выработки нужной последовательности управляющих сигналов.
Датчик сигналов обычно реализуется на основе счетчика с дешифратором или на сдвиговом регистре .
Датчик сигналов на основе счетчика с дешифратором
Реализация датчика сигналов на основе счетчика с дешифратором представлена на рис. 4.3. По заднему фронту каждого тактового импульса, поступающего на устройство управления с системного генератора импульсов , счетчик увеличивает свое состояние; выходы счетчика соединены со входами дешифратора, выходы которого и являются выходами датчика сигналов (рис. 4.4).
В этом разделе можно подоборать интерьерные краски в Москве.
Устройство управления. Микропрограммный автомат
Устройство управления. Микропрограммный автомат
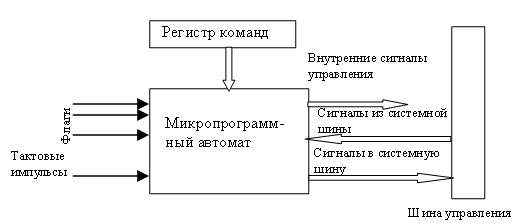
- тактовые импульсы — с каждым импульсом УУ выполняет одну или несколько микроопераций;
- код операции — поступает из регистра команды и используется, чтобы определить, какие микроопераций должны выполняться;
- флаги — требуются для оценки состояния процессора, что необходимо для выполнения команд условного перехода;
- сигналы из системной шины — обслуживание прерывания, прямого доступа в память. В свою очередь УУ, а точнее микропрограммный автомат, формирует следующую выходную информацию:
- внутренние сигналы управления — перемещают операнды из регистра в регистр и инициируют работу операционных устройств;
- сигналы в системную шину — управляющие сигналы в память или в устройства ввода-вывода.
Модель устройства управления
Как отмечалось, процесс функционирования ЭВМ состоит из последовательности элементарных действий в ее узлах. Такие элементарные действия, выполняемые в течение одного такта сигналовсинхронизации, называются микрооперациями. Совокупность одновременно выполняемых микроопераций образует микрокоманду.
Последовательность микрокоманд, определяющая порядок реализации машинного цикла, составляет микропрограмму. Микропрограммный автомат определяет микропрограмму как последовательность выполнения микроопераций. В общей структуре УУ можно выделить две части: управляющую и адресную. Управляющая часть предназначена для координирования работы операционного блока, адресной части, основной памяти и др. Адресная часть обеспечивает формирование адресов команд и адресов операндов в основной памяти. Состав управляющей части: регистр команды, микропрограммный автомат, узел прерываний и приоритетов. Микропрограммный автомат на основе декодирования команды вырабатывает определенную последовательность микрокоманд. В зависимости от способа формирования микрокоманд различают микропрограммные автоматы с жесткой и программируемой логикой. Адресная часть УУ включает в себя: операционный узел устройства управления (ОПУУ), регистр адреса, счетчик команд. Регистр адреса используется для хранения исполнительных адресов операндов, а счетчик команд — для выработки и хранения адресов команд. Их содержимое посылаются в регистр адреса основной памяти. ОПУУ обрабатывает адресные части команд, формируя исполнительные адреса операндов, а также подготавливает адрес следующей команды при выполнении команд перехода. Иногда ОПУУ совмещают с основным операционным устройством. Ниже будет рассмотрена схема ОПУУ процессора i8086.
Микропрограммный автомат с жесткой логикой. Микропрограммный автомат с программируемой логикой
Микропрограммный автомат с жесткой логикой
Тип микропрограммного автомата определяет название всего УУ. В микропрограммном автомате с жесткой логикой (см. рисунок ниже) выходные сигналы управления реализуются за счет однажды соединенных логических схем. Микропрограммный автомат с жесткой логикой. Код операций (КОП), хранящийся в регистре команды, используется для определения того, какие сигналы управления и в какой последовательности должны формироваться. При этом, желательно иметь в УУ отдельный логический сигнал для каждого кода операции (IK). Это может быть реализовано с помощью дешифратора.
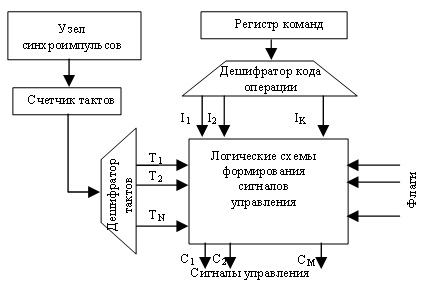
Микропрограммный автомат с жесткой логикой
Сигналы управления, по которым выполняется микрооперация, должны вырабатываться в строго определенные моменты времени, поэтому все сигналы управления "привязаны" к импульсам синхронизации. Счетчик тактов сбрасывается (устанавливается в состояние Т1) по окончании цикла очередной команды. Цикл команды может потребовать разного количества тактов. На каждом такте вырабатывается своя микрокоманда, состоящая из нескольких сигналов управления. Дополнительным фактором, влияющим на выработку сигналов управления, являются флаги.
Микропрограммный автомат с программируемой логикой
Отличительной особенностью микропрограммного автомата с программируемой логикой является наличие памяти микропрограмм. Каждой команде вычислительного устройства в этой памяти соответствует микропрограмма. Идею микропрограммирования сигналов управления предложил в 1951 г. Морис Уилкс (Кембриджский университет, Британия). ЭВМ стала иметь три уровня выполнения команд: между командами и сигналами управления появилась микропрограмма. Команда ЭВМ интерпретировалась в микропрограмму. Аппаратное обеспечение должно было выполнять только микропрограммы с ограниченным набором микрокоманд, отсюда существенно уменьшались аппаратные затраты. К 70-м годам идея о том, что написанная программа сначала должна интерпретироваться микропрограммами, а не выполняться непосредственно электроникой, стала преобладающей. Однако в современных процессорах, когда аппаратные затраты стали менее существенны, отказались от идеи микропрограммирования, так как она стала сдерживать рост производительности. Типичная схема микропрограммного автомата приведена на рисунке ниже.
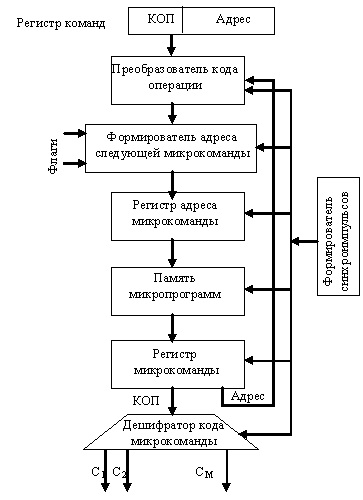
Микропрограммный автомат с программируемой логикой
Запуск микропрограммы выполнения операции осуществляется путем передачи кода операции из регистра команды на вход преобразователя, в котором код операции (КОП) преобразуется в начальный адрес микропрограммы. Выбранная по этому адресу из памяти микропрограмм микрокоманда заносится в регистр. Микрокоманда содержит КОП и адресную часть. КОП поступает на дешифратор и формирует управляющие сигналы, адрес передается для формирования адреса следующей микрокоманды. Этот адрес может зависеть от флагов, КОП, внешних устройств.
Читайте также: