
Условия равновесия в векторной форме кратко
Обновлено: 02.07.2024
Равновесие тел - состояние механической системы, в которой тела остаются неподвижными по отношению к выбранной системе отсчета.
Равновесие тел при отсутствии вращения (линии действия сил пересекаются в одной точке): Векторная сумма всех сил, действующих на тело, равна нулю(алгебраическая сумма проекций всех сил на любую ось равна нулю). или

Момент силы - равен произведению силы на плечо:
Плечо силы - расстояние от оси вращения до линии действия силы. (обозначают буквами ℓ или d).
Момент силы, вращающий тело против часовой стрелки, считают положительным, по часовой стрелке - отрицательным.

Центр масс - точка, через которую должна проходить линия действия силы, чтобы под действием этой силы тело двигалось поступательно.
Центр тяжести - точка приложения силы тяжести, действующей на тело. В однородном поле тяготения центр тяжести и центр масс совпадают.
Разновидности рычага: блок, ворот.
Условие равновесия рычага: отношение сил обратно пропорционально отношению плеч этих сил.
"Золотое правило механики": выигрывая в силепроигрываешь в расстоянии.

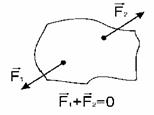
Равновесие тел при отсутствии вращения (линии действия сил не пересекаются в одной точке):
1. Векторная сумма всех сил, действующих на тело, равна нулю;
2. Алгебраическая сумма моментов всех сил, действующих на тело, относительно любой точки равна нулю.

Т.е.
ПАРА СИЛ: Момент пары:
Пару нельзя уравновесить одной силой (равной величины)!
Примеры: завинчивание гайки гаечным ключом, вращение рамки с током в магнитном поле и т.д.
Виды равновесия:
Устойчивое: При малом отклонении тела от положения равновесия возникает сила, стремящаяся возвратить тело в исходное состояние.

Безразличное: При малом отклонении тело остается в равновесии.
Неустойчивое: При малом отклонении тела из положения равновесия возникают силы, стремящиеся увеличить это отклонение.
В положении устойчивого равновесия тело обладает минимальной потенциальной энергией. При выведении тела из этого положения его потенциальная энергия увеличивается. Если работу над телом совершает только сила тяжести, то в положении устойчивого равновесия центр тяжести тела находится на наименьшей высоте.
Все тела стремятся к минимуму потенциальной энергии. (Потенциальная яма).
Равновесие тел на опоре: линия действия силы тяжести проходит через площадь опоры (Пизанская башня). Чем ниже центр тяжести, тем более устойчиво равновесие.

Рассмотрим условия равновесия произвольной плоской и пространственной систем сил, включая три основные формы и частные случаи равновесия для систем параллельных и сходящихся сил:
Из основной теоремы статики следует, что любая система сил и моментов, действующих на твердое тело, может быть приведена к выбранному центру и заменена в общем случае главным вектором и главным моментом.
Если система уравновешена, то получаем условия равновесия: R=0, MO=0. Из этих условий для пространственной системы сил получается шесть уравнений равновесия, из которых могут быть определены шесть неизвестных:
Формы условий равновесия
Первая форма
Для плоской системы сил (например, в плоскости Oxy) из этих уравнений получаются только три:
причем оси и точка O, относительно которой пишется уравнение моментов, выбираются произвольно. Это первая форма уравнений равновесия.
Вторая форма
Уравнения равновесия могут быть записаны иначе:
Это вторая форма уравнений равновесия, причем ось Ox не должна быть перпендикулярна линии, проходящей через точки A и B.
Третья форма
Это третья форма уравнений равновесия, причем точки A, B и C не должны лежать на одной прямой.
Предпочтительность написания форм уравнений равновесия зависит от конкретных условий задачи и навыков решающего.
Другие условия равновесия
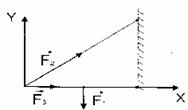
При действии на тело плоской системы параллельных сил одно из уравнений исчезает и остаются два уравнения (рисунок 1.26, а):



Для пространственной системы параллельных сил (рисунок 1.26, б) могут быть записаны три уравнения равновесия:
Для системы сходящихся сил (линии действия которых пересекаются в одной точке) можно написать три уравнения для пространственной системы:
и два уравнения для плоской системы:
В каждом из вышеприведенных случаев число неизвестных, находимых при решении уравнений, соответствует числу записанных уравнений равновесия.


To сделать систему таких сил равной нулю, необходимо и достаточно, чтобы и сила А, и пара моментов, равных основному моменту Lo , , равнялись нулю. Для системы произвольных сил получены следующие условия векторного равновесия: для равновесия системы сил, приложенных к твердому телу, главный вектор системы сил равен нулю, А главный момент системы сил относительно любого центра торможения также достаточен, чтобы равняться нулю. В противном случае: F ,, F2, Fn если 0, то необходимые и достаточные условия Я = 0, О =0. 11.
- Условие 11 является векторным условием равновесия системы любой силы. Обычно в основе численного значения силы лежит величина линейной упругой силы, например пружины динамометра, которая пропорциональна ее деформации. Численные значения сил различной природы определяются в сравнении со значениями линейных упругих сил.
Эффект кратковременных возмущений, действующих на гироскоп, обусловлен кратковременным ускорением, например, за счет движения объекта, на котором он установлен, и на гироскоп это не влияет. Людмила Фирмаль
Помимо численного значения, сила характеризуется точкой приложения и направлением действия. Для представления численного значения силы или ее коэффициента используется знак коэффициента вектора.
Если вам потребуется заказать теоретическую механику вы всегда можете написать мне в whatsapp.


Образовательный сайт для студентов и школьников
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института

Векторные условия равновесия произвольной системы сил: для равновесия системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы главный вектор системы сил был равен нулю и главный момент системы сил относительно любого центра приведения также был равен нулю. Иначе: для того чтобы ~0, необходимы и достаточны условия:
, или,. (19)
Условия равновесия пространственной системы сил в аналитической форме
Для равновесия пространственной системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы три суммы проекций всех сил на оси декартовых координат были равны нулю и три суммы моментов всех сил относительно трех осей координат также были равны нулю.

. (20)
Условия равновесия пространственной системы сходящихся сил
Для равновесия пространственной системы сходящихся сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы проекций сил на каждую из трех прямоугольных осей координат были равны нулю:
; ;, (21)

В случае плоской системы сходящихся сил одну из осей координат, обычно , выбирают перпендикулярной силам, а две другие оси – соответственно в плоскости сил. Для равновесия плоской системы сходящихся сил, действующих на твердое тело, необходимо и достаточно, чтобы суммы проекций этих сил на каждую из двух прямоугольных координатных осей, лежащих в плоскости сил, были равны нулю:
; , (22)
Условия равновесия пространственной системы параллельных сил

Направим ось параллельно силам:для равновесия пространственной системы параллельных сил, приложенных к твердому телу, необходимо и достаточно, чтобы алгебраическая сумма этих сил была равна нулю и суммы моментов сил относительно двух координатных осей, перпендикулярных силам, также были равны нулю:

(23)
Условия равновесия плоской системы сил
Расположим оси ив плоскости действия сил.
Условия равновесия плоской системы сил в первой форме: для равновесия плоской системы сил, действующих на твердое тело, необходимо и достаточно, чтобы суммы проекций этих сил на каждую из двух прямоугольных осей координат, расположенных в плоскости действия сил, были равны нулю и сумма алгебраических моментов сил относительно любой точки, находящейся в плоскости действия сил, также была равна нулю:

(24)
Для равновесия плоской системы параллельных сил, приложенных к твердому телу, необходимо и достаточно, чтобы алгебраическая сумма сил была равна нулю и сумма алгебраических моментов сил относительно любой точки, находящейся в плоскости сил, также была равна нулю:

(25)
Теорема о трех моментах (вторая форма условий равновесия): для равновесия плоской системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы алгебраических моментов сил системы относительно трех любых точек, расположенных в плоскости действия сил и не лежащих на одной прямой, были равны нулю:

. (26)
Третья форма условий равновесия: для равновесия плоской системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы алгебраических моментов сил относительно двух любых точек, лежащих в плоскости действия сил, были равны нулю и алгебраическая сумма проекций этих сил на какую-либо ось плоскости, не перпендикулярную прямой, проходящей через две моментные точки, также была равна нулю, т.е.

. (27)
Читайте также: