
Управление двигателями постоянного тока кратко
Обновлено: 05.07.2024
Как известно, коллекторные двигатели постоянного тока, если смотреть в общем плане, являются наиболее доступными и распространенными в использовании, находящими надлежащее место в самых разнообразных устройствах. Их достоинства несомненны — это цена и простота схем управления. Если с первым утверждением трудно не согласиться, то второе — часто вводит в заблуждение, и не только неопытного пользователя. Действительно, управление скоростью такого двигателя вроде бы и не вызывает особых сложностей — это могут быть как обычные аналоговые регуляторы напряжения, так и более сложные схемы на основе широтно-импульсных (ШИМ) регуляторов. Проблема, а вернее, проблемы скрываются в другом. Дело в том, что необходимо рассматривать вопрос управления коллекторным двигателем постоянного тока в контексте его реального применения с конкретной нагрузкой и в конкретных условиях, а именно — строить схему управления в зависимости от типа решаемой задачи.
Если существует проблема не просто регулирования, а стабилизации скорости, она решается при помощи сложных систем с контуром обратной связи. Одним из элементов такой обратной связи являются датчики, дающие информацию о скорости вращения. Информация снимается или с вала ротора двигателя, или с конечного исполнительного механизма. Стабилизация скорости осуществляется либо путем использования фазовой автоматической подстройки частоты (ФАПЧ) вращения, либо традиционными для автоматики специальными регуляторами. Обычно применяются пропорционально-интегрально-дифференциальные (ПИД) регуляторы, как более универсальные, или пропорционально-интегральные (ПИ), как более простые. В любом случае оба решения достаточно сложны как для расчета, так и для исполнения, поскольку они привязаны не только к конкретному типу двигателя, но и ко всей системе привода в целом. Причем характеристики регулирования в данных системах определяются экспериментально. Ознакомиться с подобными регуляторами можно во втором томе [7]. Все изложенное выше касается построения петли управления. Но в любом случае в качестве конечных каскадов в таких системах предусмотрены либо аналоговые регуляторы, либо регуляторы с ШИМ.

Рис. 1. Схема управления для маломощных двигателей, работающих на прецизионную нагрузку с переменным моментом
Естественно, можно подобрать стандартные ИМС регуляторов, но данное решение более гибко и легко адаптируется к конкретному применению. Оно особенно удобно в случаях, когда важна не скорость вращения, а необходимый момент, который должен развиваться двигателем. Причем он точно не определен или меняется в зависимости от обстоятельств, например от внешнего воздействия, изменения нагрузки или напряжения питания. Схема представляет собой регулятор напряжения с внешним управлением запуском и ограничением по току, то есть он имеет падающую выходную характеристику — зависимость выходного напряжения от тока, потребляемого двигателем. Выходное напряжение регулятора при номинальной нагрузке двигателя (задается делителем R6, R8 и для варианта, приведенного на рис. 1) может быть установлено в пределах от 10,8 до 2,3 В. В среднем положении ротора подстроечного резистора R8 выходное напряжение регулятора при изменении питающего напряжения от 9 до 15 В равно (4,4 ±0,1) В. Первичная характеристика управления ограничением по току задается номиналом сопротивления R3 и устанавливается подстроечным резистором R4 (с учетом резистора R5). Максимальный выходной ток может быть с приемлемой точностью рассчитан по формуле:
где 6,6 — это максимальное напряжение на эмиттере транзистора VT1 регулятора в режиме короткого замыкания в нагрузке.
Учитывая особенности приведенной схемы, ее настройка производится следующим образом: выход схемы управления закорачивается амперметром, и подстроечным резистором R4 устанавливается необходимый ток ограничения; затем подключается двигатель на минимальной нагрузке ротора и резистором R8 устанавливается соответствующее выходное напряжение, обеспечивающее заданную скорость вращения двигателя. Схема с высокой точностью (в описываемом режиме не хуже чем в 2%) удерживает выходное напряжение на заданном уровне до достижения 65% нагрузки (максимального выходного тока, установленного резистором R4). Далее напряжение на двигателе начинает плавно уменьшаться, тем самым ограничивая развиваемый им момент. График изменения тока и напряжения в зависимости от нагрузки двигателя (рабочее напряжение 5 В, сопротивление обмотки 2 Ом) приведен на рис. 2.

Рис. 2. График выходного тока (Iout) и выходного напряжения (Vout) регулятора (рис. 1) в зависимости от нагрузки при токе ограничения 200 мА
Управление включением/выключением двигателя осуществляется командой CTRL — логической единицей от любой цифровой микросхемы или подачей на этот вывод напряжения уровнем не ниже +1,5 В. При включении схемы (из-за ограничения тока и, следовательно, момента) рывка в управлении внешней нагрузкой не происходит. После разгона двигатель переходит в стационарный режим с током потребления ниже установленного схемой ограничения. При увеличении нагрузки двигателя более установленного уровня выходной ток регулятора остается на уровне, заданном схемой ограничения, а напряжение на двигателе плавно уменьшается (рис. 2) и при закорачивании его ротора вследствие полной остановки становится равным падению напряжения на активном сопротивлении обмотки ротора при заданном максимальном выходном токе. График, показывающий изменение мощности двигателя (условия аналогичные для графика, приведенного на рис. 2) в зависимости от нагрузки, показан на рис. 3.

Рис. 3. График зависимости мощности, развиваемой двигателем от нагрузки, при токе ограничения 200 мА
Как видно из графика (рис. 3), мощность, в случае если нагрузка на двигатель превышает 70%, начинает ограничиваться и плавно уменьшаться. При принудительной остановке двигателя она составит всего 12% от максимально установленной, тем самым защищая двигатель от перегрузки и исключая его резкое торможение. Ток ограничения регулятора рекомендуется выбирать на 20-25% выше номинального рабочего тока в заданном режиме эксплуатации двигателя при минимально допустимом рабочем напряжении двигателя. При проектировании устройств с использованием описанного принципа необходимо обязательно учитывать мощность, рассеиваемую на регулирующем транзисторе VT1 (возможно, потребуется радиатор), а в ряде случаев и мощность, рассеиваемую на резисторе R3. Кроме особенностей схемы, описанных выше, данное решение продлевает срок службы двигателя и упрощает общую конструкцию приемного узла, так как она уже не требует большого количества компенсирующих неравномерность приема магнитного носителя роликов. А в отличие от вариантов с использованием ШИМ данное решение практически не оказывает дополнительного влияния на общий уровень электромагнитных и радиопомех устройства в целом.

Рис. 4. Упрощенный вариант аналогового регулятора на базе ИМС LM317T
Расчет такой схемы предельно прост. Для рассматриваемого случая выходное напряжение на холостом ходу определяется по формуле:
где Vref — напряжение внутреннего опорного источника, согласно спецификации [6] типовое значение Vref = 1,25 В.
Ток ограничения задается резистором Rlim и равен:
Условия оставим без изменений: выходное напряжение 5 В, ток ограничения 200 мА. Результаты расчетов номиналов элементов указаны на схеме рис. 4.
Теперь, чтобы развеять сомнения и снять вопросы по использованию подобных решений, на рис. 5 и 6 приведены графики зависимостей для схемы рис. 4 в аналогичных условиях схемы рис. 1.

Рис. 5. График выходного тока (Iout) и выходного напряжения (Vout) регулятора (рис. 4) в зависимости от нагрузки при токе ограничения 200 мА

Рис. 6. Графики зависимости мощности и напряжения на двигателе от нагрузки при токе ограничения 200 мА для варианта схемы на рис. 4
Заметна разница? Мощность на двигателе упала в два раза, и схема уже не является стабилизатором напряжения. Токоограничивающий резистор будет иметь номинал на уровне 6 Ом, и об оперативной подстройке тока можно будет забыть. При этом учтите, что напряжение холостого хода необходимо будет выставить не 5 В, а 6,4 В. Выйти из такой ситуации можно последовательным соединением двух каскадов на ИМС LM317T. Первый включается в режим стабилизатора тока на 200 мА, второй — в режим стабилизатора напряжения на 5 В. Но даже в таком варианте вы не получите ту гибкость в регулировке и управлении (в частности, управление включением/выключением малым током), которую дает предлагаемая схема на рис. 1.

Рис. 7. Схема управления для коллекторных двигателей средней мощности, работающих на инерционную нагрузку
Основа схемы — микросхема драйвера LMD18245T (ранее National Semiconductor Corp., в настоящее время Texas Instruments Inc.), обычно используемого для шаговых двигателей [4] в нестандартном, не документированном в спецификации включении без импульсного управления. Учитывая допустимое использование этой ИМС в долговременном режиме прерывания подачи импульсов управления, предложенный вариант ее включения нельзя считать запрещенным. Подробно особенности данной ИМС описаны в [2]. Напомним кратко: максимальный ток драйвера задается резистором, включенным в цепь контакта 13 ИМС LMD18245T (резистор R4, рис. 4), и двоичным кодом на контактах цепи управления выходным током (выводы 8, 7, 6, 4). Формула для расчета максимального выходного тока драйвера приведена в спецификации [4], и для рассматриваемого случая он будет равен:
Соответственно (поскольку задействованы все 16 разрядов ЦАП), ток ограничения драйвера при использовании токоограничивающего резистора RS номиналом 15 кОм (R4) составит 1,33 А. Для выбора и установки режима можно воспользоваться и таблицей, имеющейся в последнем выпуске спецификации [4].
На рис. 8 и 9 приведены практические конструкции с использованием решения, приведенного на рис. 7.
Рис. 8. Плата управления коллекторным двигателем на базе ИМС LMD18245T

Рис. 9. Механизм в сборе: на кольцевидной платформе установлена полезная нагрузка
В статье дается краткий обзор и анализ популярных схем, предназначенных для управления коллекторными двигателями постоянного тока, а также предлагаются оригинальные и малоизвестные схемотехнические решения
Электродвигатели являются, наверное, одним из самых массовых изделий электротехники. Как говорит нам всезнающая Википедия, электрический двигатель – электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую. Началом его истории можно считать открытие, которое сделал Майкл Фарадей в далеком 1821 году, установив возможность вращения проводника в магнитном поле. Но первый более-менее практический электродвигатель с вращающимся ротором ждал своего изобретения до 1834 года. Его во время работы в Кёнигсберге изобрел Мориц Герман фон Якоби, более известный у нас как Борис Семенович. Электродвигатели характеризуют два основных параметра – это скорость вращения вала (ротора) и момент вращения, развиваемый на валу. В общем плане оба этих параметра зависят от напряжения, подаваемого на двигатель и тока в его обмотках. В настоящее время имеется достаточно много разновидностей электродвигателей, и поскольку, как заметил наш известный литературный персонаж Козьма Прутков, нельзя объять необъятное, остановимся на рассмотрении особенностей управления двигателями постоянного тока (далее электродвигателями).
Коллекторные двигатели (Рисунок 1) более дешевы и, как правило, не требуют сложных систем управления. Для их функционирования достаточно подачи напряжения питания (выпрямленного, постоянного!). Проблемы начинают возникать, когда появляется необходимость в регулировке скорости вращения вала такого двигателя или в специальном режиме управления моментом вращения. Основных недостатков таких двигателей три – это малый момент на низких скоростях вращения (поэтому часто требуется редуктор, а это отражается на стоимости конструкции в целом), генерация высокого уровня электромагнитных и радиопомех (из-за скользящего контакта в коллекторе) и низкая надежность (точнее малый ресурс; причина в том же коллекторе). При использовании коллекторных двигателей необходимо учитывать, что ток потребления и скорость вращения их ротора зависят от нагрузки на валу. Коллекторные двигатели более универсальны и имеют более широкое распространение, особенно в недорогих устройствах, где определяющим фактором является цена.
Поскольку скорость вращения ротора коллекторного двигателя зависит, в первую очередь, от подаваемого на двигатель напряжения, то естественным является использование для его управления схем, имеющих возможность установки или регулировки выходного напряжения. Такими решениями, которые можно найти в Интернете, являются схемы на основе регулируемых стабилизаторов напряжения и, поскольку век дискретных стабилизаторов давно прошел, для этого целесообразно использовать недорогие интегральные компенсационные стабилизаторы, например, LM317 [2]. Возможные варианты такой схемы представлены на Рисунке 2.
Схема примитивная, но кажется очень удачной и, главное, недорогой. Посмотрим на нее с точки зрения инженера. Во-первых, можно ли ограничить момент вращения или ток двигателя? Это решается установкой дополнительного резистора. На Рисунке 2 он обозначен как RLIM. Его расчет имеется в спецификации, но он ухудшает характеристику схемы как стабилизатора напряжения (об этом будет ниже). Во-вторых, какой из вариантов управления скоростью лучше? Вариант на Рисунке 2а дает удобную линейную характеристику регулирования, поэтому он и более популярен. Вариант на Рисунке 2б имеет нелинейную характеристику. Но в первом случае при нарушении контакта в переменном резисторе мы получаем максимальную скорость, а во втором – минимальную. Что выбрать – зависит от конкретного применения. Теперь рассмотрим один пример для двигателя с типовыми параметрами: рабочее напряжение 12 В; максимальный рабочий ток 1 А. ИМС LM317, в зависимости от суффиксов, имеет максимальный выходной ток от 0.5 А до 1.5 А (см. спецификацию [2]; имеются аналогичные ИМС и с бóльшим током) и развитую защиту (от перегрузки и перегрева). С этой точки зрения для нашей задачи она подходит идеально. Проблемы скрываются, как всегда, в мелочах. Если двигатель будет выведен на максимальную мощность, что для нашего применения весьма реально, то на ИМС, даже при минимально допустимой разнице между входным напряжением VIN и выходным VOUT, равной 3 В, будет рассеиваться мощность не менее
Таким образом, нужен радиатор. Опять вопрос – на какую рассеиваемую мощность? На 3 Вт? А вот и нет. Если не полениться и рассчитать график нагрузки ИМС в зависимости от выходного напряжения (это легко выполнить в Excel), то мы получаем, что при наших условиях максимальная мощность на ИМС будет рассеиваться не при максимальном выходном напряжении регулятора, а при выходном напряжении равном 7.5 В (см. Рисунок 3), и она составит почти 5.0 Вт!
| Рисунок 3. | График зависимости мощности, рассеиваемой на ИМС регулятора, от выходного напряжения. |
Как видим, получается что-то уже не дешевое, но очень громоздкое. Так что такой подход годится только для маломощных двигателей с рабочим током не более 0.25 А. В этом случае мощность на регулирующей ИМС будет на уровне 1.2 Вт, что уже будет приемлемо.
На первом операционном усилителе собран генератор, на втором компаратор. На вход компаратора подается сигнал с конденсатора C1, а путем регулирования порога срабатывания формируется уже сигнал прямоугольной формы с нужным отношением τ/T (Рисунок 5).
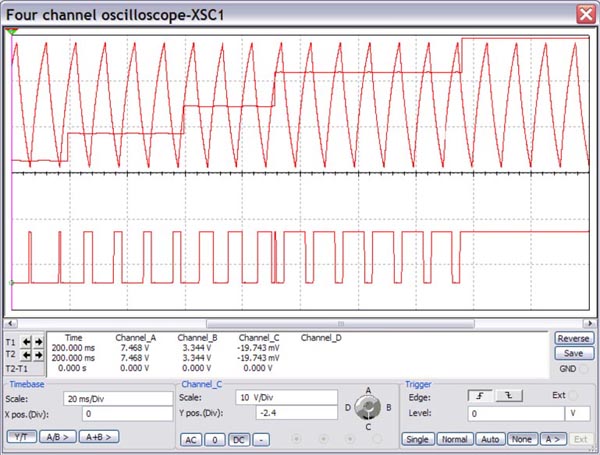 | |
| Рисунок 5. | Диаграмма управления коллекторным двигателем на основе ШИМ. Верхняя трасса – напряжение на конденсаторе С1; средняя (пересекает верхнюю) – сигнал управления (напряжение на движке резистора RV2); нижняя – напряжение на двигателе. |
Диапазон регулировки устанавливается подстроечными резисторами RV1 (быстрее) и RV3 (медленнее), а сама регулировка скорости осуществляется резистором RV2 (скорость). Обращаю внимание читателей, что в Интернете на русскоязычных форумах гуляет похожая схема с ошибками в номиналах делителя, задающего порог компаратора. Управление непосредственно двигателем осуществляется через ключ на мощном полевом транзисторе типа BUZ11 [4]. Особенности этого транзистора типа MOSFET – большой рабочий ток (30 А постоянного, и до 120 А импульсного), сверхмалое сопротивление открытого канала (40 мОм) и, следовательно, минимальная мощность потерь в открытом состоянии.
На что нужно в первую очередь обращать внимание при использовании таких схем? Во-первых, это исполнение цепи управления. Здесь в схеме (Рисунок 4) есть небольшая недоработка. Если со временем возникнут проблемы с подвижным контактом переменного резистора, мы получим полный почти мгновенный разгон двигателя. Это может вывести из строя наше устройство. Какое противоядие? Установить добавочный достаточно высокоомный резистор, например, 300 кОм с вывода 5 ИМС на общий провод. В этом случае при отказе регулятора двигатель будет остановлен.
Еще одна проблема таких регуляторов – это выходной каскад или драйвер двигателя. В подобных схемах он может быть выполнен как на полевых транзисторах, так и на биполярных; последние несравненно дешевле. Но и в первом и во втором варианте необходимо учитывать некоторые важные моменты. Для управления полевым транзистором типа MOSFET нужно обеспечить заряд и разряд его входной емкости, а она может составлять тысячи пикофарад. Если не использовать последовательный с затвором резистор (R6 на Рисунке 4) или его номинал будет слишком мал, то на относительно высоких частотах управления операционный усилитель может выйти из строя. Если же использовать R6 большого номинала, то транзистор будет дольше находиться в активной зоне своей передаточной характеристики и, следовательно, имеем рост потерь и нагрев ключа.
Еще одно замечание к схеме на Рисунке 4. Использование дополнительного диода D2 лишено смысла, так как в структуре транзистора BUZ11 уже имеется свой внутренний защитный быстродействующий диод с лучшими характеристиками, чем предлагаемый. Диод D1 также явно лишний, транзистор BUZ11 допускает подачу напряжения затвор-исток ± 20 В, да и переполюсовка в цепи управления при однополярном питании, как и напряжение выше 12 В, невозможны.
Электрические двигатели постоянного тока получили широкое распространение во многих отраслях хозяйственной деятельности, что обусловливает перечень их модификаций. Регулировка работы таких компонентов также осуществляется по-разному, что мы и рассмотрим сегодня в нашей статье.
В категории двигателей постоянного тока представлены устройства двух типов: коллекторные и бесколлекторные (шаговые). В первом случае обмотки ротора генерируют магнитное поле переменного типа, которое и обеспечивает вращения вала мотора. Запитка при этом осуществляется посредством щеточного коммутатора, который является, по сути, коллектором.
Шаговые же модификации более сложные конструктивно и, соответственно, дороже. В процессе эксплуатации демонстрируют более высокие показатели продуктивности, хоть и имеют ряд своих особенностей.
Независимо от типа конструкции, все приспособления нуждаются в эффективной и тщательной регулировке.
Коллекторные моторы
Несмотря на то, что в процессе работы коллекторные электродвигатели 220в отличаются своей простотой, которая не требует особых усилий для управления, в процессе эксплуатации могут возникнуть особые ситуации. К ним относится, например, потребность в управлении скоростью и частотой вращения вала мотора, в том числе при работе специальном режиме регулирования крутящего момента.
Из недостатков таких силовых агрегатов стоит выделить:
- малый крутящий момент при работе на низких скоростях оборотов. Именно поэтому возникает необходимость в применении редуктора, что существенно повышает конечную стоимость конструкции;
- генерирование радио- и электромагнитных помех на высоких уровнях. Это обусловливается наличием в коллекторе скользящего контакта;
- меньший ресурс, причиной которому также является коллектор.
Применение таких устройств, требует учета зависимости между током потребления и скоростью вращения от уровня нагрузки на валу. Модели отличаются большей универсальностью и широко распространены, в частности в недорогих конструкциях, где на первом месте цена.
Рассмотрим же вкратце самые распространенные схемы и методы регулирования, которые широко применяются в отечественной механике и электронике, демонстрируя высокие уровни эффективности.
Принципиальная схема
Ее работа базируется на генераторе ШИМ импульсов и симисторах регулирования работы моторов. Вариант является самым простым, его часто называют классическим. Два элемента: D1 и R1 ограничивают величину напряжения подаваемого питания до безопасных уровней. Это делается для того, чтобы обеспечить необходимый уровень фильтрации питания. Компоненты же с маркировкой R3, R5, P1 выполняют роли делителей напряжения с дальнейшими возможностями их регулировки. Они имеют место при заданиях величин мощности, которая подается в нагрузку.
При изменениях резисторного компонента R2, который входит в цепь поступления на фазы м/с, внутренние блоки синхронизуются с симистором типа ВТ 139.
Другие схемы и методы
Также электриками применяются более модернизированные способы и методы регулирования показателей в электрических двигателях типа DC. Рассмотрим вкратце некоторые из них.
Реостатно-контакторное
Управление реостатное при реализации применяют одну из трех схем:
- при управлении скоростью n с 0 до уровня n номинального, в якорную цепь подключается реостат, обеспечивающий тем самым якорный тип управления;
- если есть необходимость, чтобы n превышал n номинальное, в цепь дополнительно включают в цепь ОВ, реализуя тем самым полюсное регулирование;
- чтобы реализовать соотношения n ˂ n ном и n ˃ n ном , применяют параллельное включение реостатов в цепь ОВ и в якорную сеть.

Стоит отметить, что все эти схемы имеют место при ручном управлении. Автоматический же вариант подразумевает применение переключения ступенчатого типа R pa R pb , посредством контакторов (в их роли могут выступать электронные коммутаторы или же обыкновенные еле).
Для обеспечения плавного и максимально точного регулирования скорости можно дополнительно устанавливать коммутируемые резисторы и прочие детали коммутации. Такой вариант обусловливает увеличение габаритных размеров, стоимость, и, к сожалению, снижает общую эффективность.
Система Г-Д
Управлять двигателем 220 с применением данной системы получается посредством схемы Rb, когда Uв изменяется от 0 до n номинального. Чтобы на выходе получить скорость мотора, выше номинального значения, необходимо произвести изменение уровня Rвд. Это сделать достаточно просто – нужно уменьшить показатель тока ОВ мотора, что в свою очередь уменьшит основной поток (Ф), что в конечном итоге и приведет к увеличению показателя скорости (n).
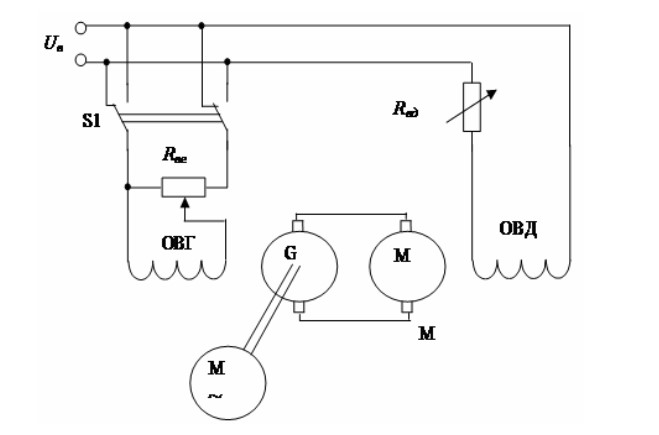
Переключатель (S1) отвечает здесь за реверс – изменение направления вращения ротора. Управление проводится с помощью регулирования относительно малых токов возбуждения Д и Г, что позволяет ему с легкостью адаптироваться к задачам.
В целом, такой контроллер довольно удобен для точного управления, но в то же время обладает и несколькими недостатками:
- крупные габариты и вес;
- низкий коэффициент полезного действия;
- на каждом шаге энергетически потери, что обусловливается трехкратным преобразованием энергии (механической в электрическую и наоборот).
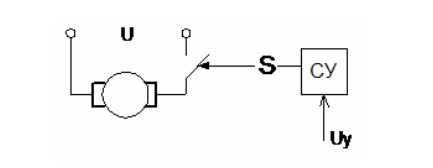
Импульсное управление
Основа данного способа – это подача прерывателем на двигатель импульсов напряжения, которые должны быть специально модулированы, исходя из управляющего напряжения. Исходя из этого они бывают к примеру, ШИМ или ВИМ, но об этом чуть позже.
Скорость оборотов якоря меняется при помощи влияния временных изменений, при которых к мотору осуществляется подведение номинального напряжения, а не посредством изменений в управленческих токах. Грамотна работа исправного двигателя подразумевает поочередное изменение периодов набора скорости и тормож ения .
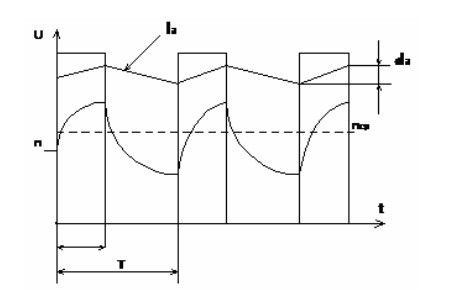
Если же эти этапы малые, по сравнению с полным промежутком для разгона, то показатель скорости n не может догнать завершение каждого периода установленных значений n номинального (при разгоне) или n=0 в случае плавной остановки. В таком случае устанавливается специальный показатель ncp, размер которого напрямую определяется длительностью запуска.
Именно поэтому в системе автоматического управления нужно дополнительно установить схему регулирования. Она будет выполнять свою ключевую функцию – преобразовывать управленческий сигнал постоянный или преобразовывающийся в четкую последовательность импульсов управления. При этом, относительная продолжительность включения этих сигналов является заданным показателем величины. Также, при импульсном регулировании используются полупроводниковые детали силового типа: транзисторы (биполярные или полевые), а также тиристоры.
Тиристорное управление
Такие компоненты, как тиристоры, получили широкое распространение среди полупроводников и преобразователей.
При попадании на элемент напряжения, он его не проводит. Осуществить запуск приспособления можно одним из двух способов:
- начать подачу тока между катодом и анодом. Уровень будет достаточным для открытия компонента, благодаря чему, принцип работы будет похож на такую деталь, как динистор;
- осуществить подачу кратковременного импульса на электрод платы управления. Ток для открывания тиристора находится в диапазоне от 70 до 160 мА. Более точный показатель определяется моделями устройств и условиями окружающей среды.
Дальше тиристорное управление подразумевает успешное открытие элемента и дальнейшее отключение управляющего сигнала. Деталь будет находится в открытом состоянии, до тех пор, пока через нее будет проходить прямой ток и напряжение. При падении напряжения к нулю, ток симметрично снизится. Такой инновационный драйвер имеет много общих параметров с симмистором. В последнем случае нужно чтобы в цепи АС было сразу два импульса напряжения управления, для каждой синусоидной полуволны.
Мостовая схема
Максимально полно реализованная мостовая схема эл двигателя представляет собой Н-подобный мост. В конструкцию мини-системы входит 4 выключателя, которые соединяются между собой последовательно-параллельным способом. Также широко применяется электронный вариант данной схемы, которые включает в себя транзисторные детали, обеспечивающие режим переключения. Такой вариант чаще всего применяется для регулирования работы двигателей DC и дает возможность менять скорость и направления вращений ротора.
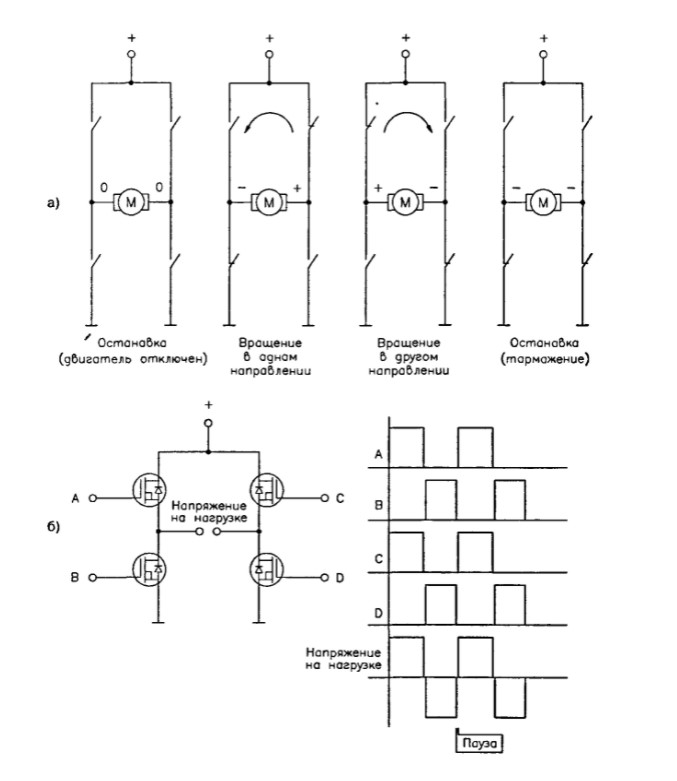
Как переключающие элементы, часто применяют МОП транзисторы, что обусловливается их малым токам, потребляемым по цепям управления. Переключение транзисторов с высокими показателями мощности – задача не из легких, ведь для этого нужно иметь в арсенале управляющее напряжение, как минимум 10 вольт.
Давайте рассмотрим еще один вариант, когда осуществляется управление мотором с ШИМ сигналом, скважность которого – 50 процентов. Вращения ротора при этом осуществляются в одном направлении. В таком случае лучше всего использовать сигнал к резистору, в то время, как второй будет открытым. Нагрев нижнего транзистора будет выше, чем у верхнего, ровно на ту величину тепла, которая выделяется при переключениях. Если есть необходимость уравнять данные показатели, можно осуществлять поочередную подачу ШИМ сигналов на каждый резистор (если они одинаковые).
Чтобы исключить попадание тока через диоды, обеспечивающие львиную долю нагрева, можно не отсоединять мотор от источника питания. Вместо этого нужно его просто вращать в другом направлении, применяя обратную связь. К примеру, есть возможность 70% импульса крутить вправо, а остальные 30% соответственно влево. В конечном итоге это даст 40% для улучшения скорости движения направо (разница двух показателей). Также в процессе этих манипуляций будут задействованы и диоды, что обусловливает комплиментарность такого способа регулирования.
Максимально полная реализация такой схемы требует наличия аккумуляторной батареи (источника питания), крупного конденсатора на линии подач.
ШИМ технология
Импульсная методология лежит в основе многих способов регулирования напряжения в электрических двигателях постоянного тока, в частности Н-мостовой. В свою очередь методика относится к Ардуино Uno. Широтно-импульсная модуляция, суть которой состоит в том, чтобы подача напряжения питания осуществлялась в форме импульсов. Параллельно с этим частота поступления импульсов находится на постоянном уровне, в то время, как длительность может изменяться.
Сигналы здесь связаны с уровнем заполнения. Показатель представляет собой противоположность скважности — отношение периода подачи импульсов к его продолжительности. Формула выглядит вот так:
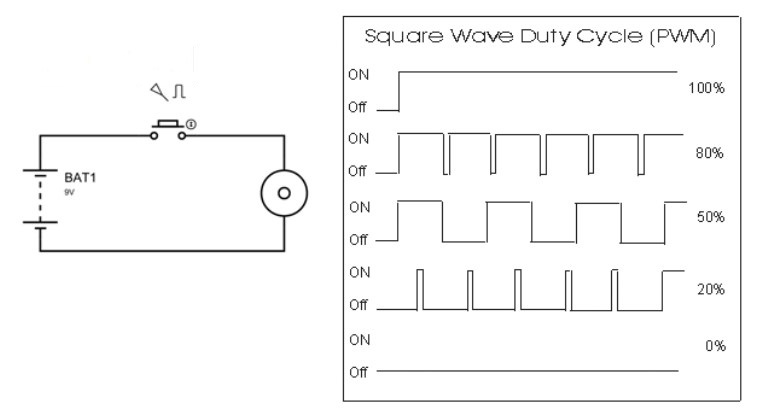
Именно поэтому, коэффициент заполнения ШИМ или цикл занятости будет равен 80%. Расчет осуществляется путем деления показателя времени во включенном состоянии на сумму времени рабочего состояния и выключенного:
Схема генерации
Всего, существует несколько эффективных схем генерации этого ШИМ импульса. Одна из простейших – это схема, включающая специальный таймер. Для ее реализации необходимо иметь минимальное количество компонентов, а также нет необходимости проводить настройку. Время реализации – не более 1 часа.
Напряжение питания VCC схемы варьируется в пределах от 5 до 16 вольт. В роли диодов VD 1 – 3 могут применяться диоды почти любых типов. Сам же таймер включает разделитель тока, компараторы (2 шт), триггер, открытый коллектор (на ключе) и буфер на выходе.
Крайние резисторные выводы подключаются к конденсаторам с помощью диодов. Само же устройство (конденсатор) при помощи второго вывода подключается на землю. Такая компоновка диодов обеспечивает зарядку конденсатора через первую, а разрядку через вторую часть резистора переменного срабатывания.
Модельный ряд регуляторов
Рассмотрим же примеры некоторых устройств, применяющих разные способы регулировки работы электрических двигателей постоянного тока.
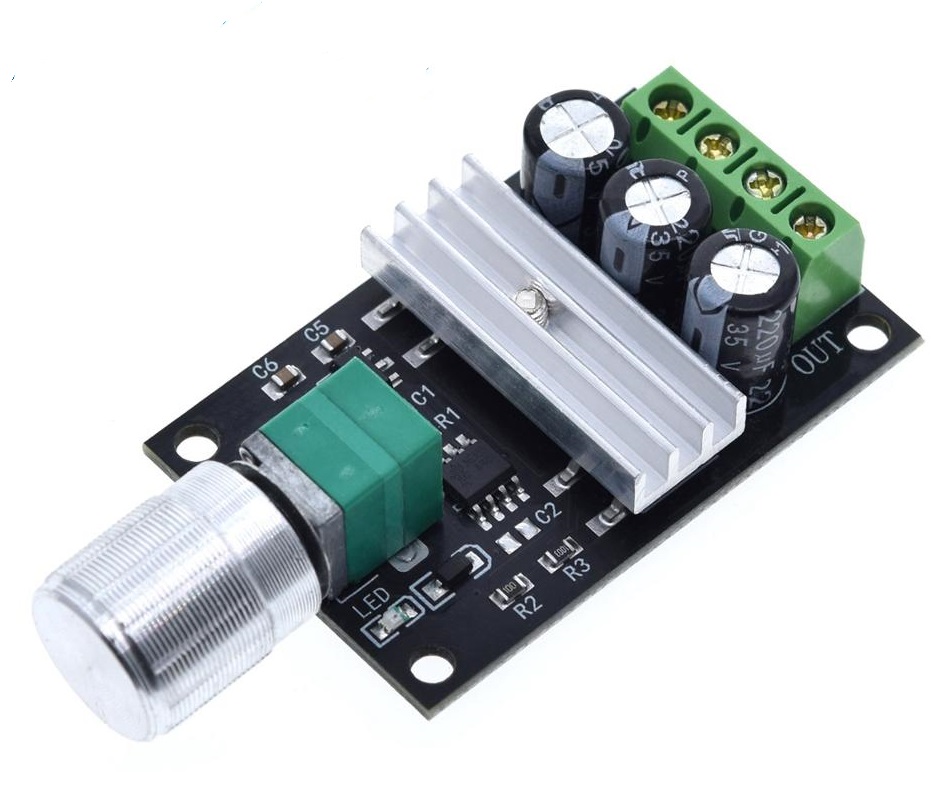
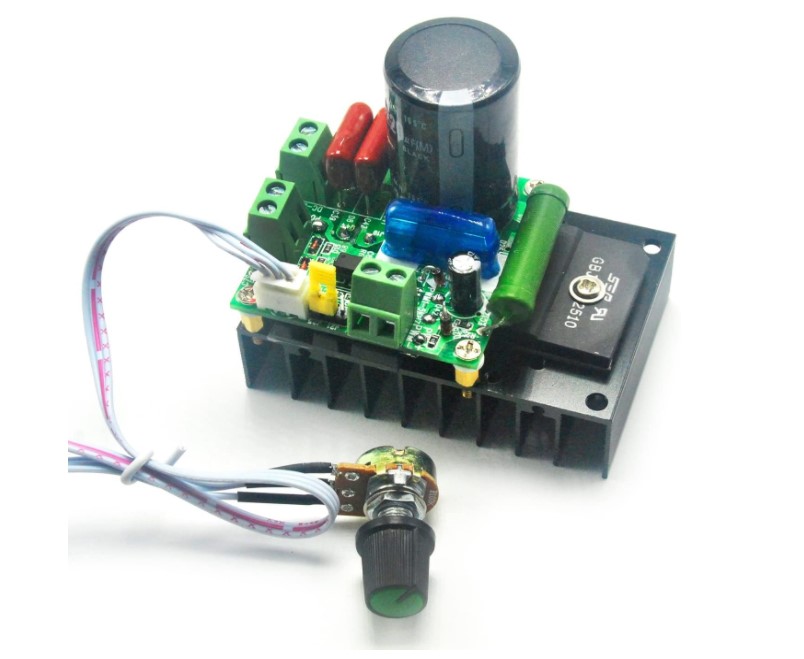
PWM 3A 80W
Устройство реализовано в нескольких модификациях, показатели напряжения которых начинаются с 12В и достигают уровня 28 вольт. Прибор — регулируемый реверсивного типа, в конструкции реализован потенциометр с возможностями коммутатора. Кабель переключения имеет длину в 15 см, входной диапазон мощности – DC6-28V. Комплектация включает реверсивный переключатель драйвера.
Motor Speed Control PWM MACH3 Speed Control
Модель представляет собой регулятор тока, диапазон номинальных мощностей которого варьируется в диапазоне от 12 до 110В. Есть также более мощные версии, рассчитанные на работу с сетями на 300 вольт. Номинальная сила тока регулируемых моторов не должна превышать показатель в 5 ампер. Отличается высокой скоростью срабатывания и компактной конструкцией.
Вывод
Как можно видеть, в современной электротехнике применяется множество эффективных способов регулировки. Все они обеспечивают слаженную работу двигателей, с минимумом затрат. Реализованы также инновационные технологии, позволяющие управлять мотором через вайфай. Подбор конкретного метода стоит проводить, ориентируясь на параметры агрегата и его технические возможности. Ресурс двигателя при этом не снижается, ведь каждый отдельно взятый способ учитывает все конструктивные особенности.
На рынке представлено множество вариаций регуляторов, каждый из которых создан на основе конкретного метода. Чаще всего применяется ШИМ импульсы, а также всяческие их комбинации, например с мостовыми схемами.
Чтобы двигатель постоянного тока начал вращаться, ему необходимо обеспечить нужное количество энергии. Как правило, для маломощных двигателей достаточно несколько ватт. Блок управления (микроконтроллер), который принимает решения о запуске двигателя, не может непосредственно управлять двигателем, то есть обеспечить необходимую мощность со своего вывода. Это связано с тем, что порты микроконтроллера имеют очень ограниченную нагрузочную способность (максимальный ток на выходе микроконтроллера обычно не более 20 мА).

Поэтому нужен усилитель мощности — устройство, которое может на своем выходе генерировать сигнал мощностью большей, чем мощность на его входе. Такими устройствами являются транзистор и реле, которые прекрасно подходят для управления двигателем постоянного тока.
Управление двигателем при помощи биполярного транзистора
Самый простой способ приведения в действие двигателя показан ниже:
Биполярный транзистор используется в качестве переключателя. Резистор R необходимо подобрать таким, чтобы в худшем случае (потенциал базы равен потенциалу эмиттера) через него протекал ток, не превышающий максимальный ток порта микроконтроллера.
Для того чтобы подобрать подходящий транзистор, нам нужно знать максимальный ток во время пуска или остановки двигателя, и ток во время нормальной его работы. Исходя из этого, мы подберем транзистор с соответствующим током коллектора и его максимальное значение.
Следует также обратить внимание на мощность, выделяющуюся на транзисторе (P = Uкэ * Iк). Несмотря на то, что транзистор в данном случае работает в состоянии насыщения и напряжение Uкэ часто не превышает 1В, коллекторный ток все же велик (около 0,5 А для двигателя среднего размера) и, следовательно, мощность, излучаемая на транзисторе может потребовать от нас установки радиатора.
Другой проблемой при применении биполярных транзисторов, может быть, слишком большой ток базы. Соотношение токов выходного сигнала к входному такого транзистора — это чаще всего 100 (это отношение называется коэффициентом усиления по току и обозначается или hfe ). Но, к сожалению, когда транзистор работает в состоянии насыщения, этот коэффициент сильно снижается.
Это приводит к тому, что если мы хотим, чтобы ток коллектора имел большое значение, это может потребовать большего тока, чем 20 мА, то есть больше, чем составляет нагрузочная способность порта микроконтроллера. В таких случаях решением может быть использование комбинации транзисторов – транзистор Дарлингтона:
Такая система ведет себя как один транзистор с большим значением усиления тока и малой скоростью работы.
Несколько слов об индуктивных нагрузках
Поскольку двигатель является индуктивной нагрузкой, мы должны быть осторожны. Если через обмотку течет ток, и мы внезапно остановим этот поток, то на выводах обмотки временно появляется большое напряжение. Это напряжение может привести к повреждению транзистора (в представленной схеме выше) вызывая пробой перехода база-коллектор. Кроме того, это может создавать значительные помехи. Для предотвращения этого необходимо параллельно с индуктивной нагрузкой подключить диод:
Во время нормальной работы двигателя диод смещен в обратном направлении. Отключение питания электродвигателя вызывает нарастание напряжения на катушке, при этом диод будет смещен в прямом направлении, благодаря чему произойдет разряд излишней энергии накопленной в катушке.
Диод следует подобрать такой, чтобы он выдерживал обратное напряжение во время нормальной работы двигателя. Такую защиту можно применять как при использовании биполярных транзисторов, так и MOSFET. Так же рекомендуется использовать диод и в работе с электромагнитным реле, для предотвращения раннего износа контактов.
Управление двигателем при помощи MOSFET транзистора
Так же можно управлять постоянным двигателем с помощью полевого транзистора MOSFET:
Он должен быть с каналом обогащенного типа. Основным преимуществом такого транзистора является практически отсутствие входного тока. Он имеет небольшое активное сопротивление канала (доли ома), благодаря чему потери мощности в транзисторе не большие. Недостатком является чувствительность к электростатическим разрядам, которые могут вывести транзистор из строя.
Так как ток стока может достигать (для среднего транзистора) десятков ампер и, имея практически нулевой входной ток, MOSFET транзисторы отлично подходят в качестве усилителя мощности и часто являются лучшей альтернативой, чем биполярные. Они так же должны быть защищены диодами от индуктивных всплесков, так как это может привести к пробою между затвором и каналом (напряжение пробоя составляет несколько десятков вольт).
Управление двигателем при помощи реле
Если вам необходимо управление двигателем постоянного тока, и вы знаете, что частота переключения не будет слишком большая (ниже 20 Гц), то вы можете для коммутации использовать реле (реле не подходят для управления ШИМ). Преимуществом такого решения является, прежде всего, малое выделение тепла.
Существуют малогабаритные реле способные управлять токами до 10 А ! Для таких больших токов, потери мощности в реле являются приемлемыми, но для небольших токов хуже. Катушка управления контактами реле можно работать даже от нескольких сотен мА. Так что нет никакого смысла в использовании такого реле для управления током подобной величины. К счастью, есть отдельные экземпляры, которые потребляют ток около 40 мА и это уже гораздо лучше.
Если речь идет о напряжении управления реле, то оно бывает от 3 до 24 В. Как мы уже писали ранее, максимальный выходной ток микроконтроллера 20 мА, а это слишком мало, чтобы управлять реле напрямую. Поэтому для управления необходимо использовать транзистор. Схема такого подключения, как правило, выглядит следующим образом:
Так и так, нам нужен транзистор. Следует, отметить, что в данном случае выделяется гораздо меньше тепла, чем на схеме, основанной только на транзисторе, так как через транзисторный ключ в этой системе течет небольшой ток, а само реле почти не рассеивает энергию в выходной цепи.
Защитный диод на реле не является обязательным. Его наличие зависит от силы тока, индуктивности катушки и максимального напряжения Uкэ транзистора. А вот наличие диода в выходной цепи больше зависит от того, хотим ли мы продлить срок службы контактов реле.
В конце рассуждений о реле приведем ситуацию, когда данный вид управления двигателем является оптимальным. Предположим, что мы хотим управлять двигателем, у которого номинальное рабочее напряжение 2,5 В и ток 3А и работает он от источника напряжением 2,5 В (переключение с небольшой частотой). Если вы будете использовать усилитель, построенный на транзисторе, то на выходе мы будем иметь падение напряжения около 1 В, что в данном случае является слишком большим значением. При использовании же реле у нас никакого падения напряжения не будет.
Управление двигателем при помощи H-моста
Решения, которые мы привели до этого, имеют основной недостаток — с их помощью не возможно управлять двигателем в двух направлениях! Такая необходимость, скорее всего, нам пригодиться, например, при строительстве роботов. H-моста — это конструкция, которая может быть построена как из обоих типов транзисторов, как и с реле.
Подробно о том, как работает H-мост можно почитать здесь
Управление шаговым двигателем
Шаговые двигатели, так же как и коллекторные, состоят в основном из катушек. То есть для вращения нужно пропустить ток через катушки. Таким образом, все из представленных схем управления двигателями могут быть использованы и для управления шаговым двигателем. (все, кроме H-моста)
Разница в схеме усилителя мощности для шаговых двигателей заключается в том, что здесь немного другие напряжения и токи, и также в основном требуется 4 переключателя на один двигатель (когда двигатель имеет пять контактов).
Номинальное рабочее напряжение, в основном, находится в диапазоне 9 — 24 В. При таких не малых напряжениях мы имеем дело также с большим током: 0,3 — 1A на одну фазу! Ниже приведен пример подключения шагового двигателя с 5 выводами:
В роли ключей мы можем также использовать MOSFET — транзисторы. Это даже более простое решение.
Так как нам нужно до 4-х транзисторов, которые занимают довольно много места на плате, хорошим решением будет использовать микросхему ULN2003A.
Читайте также: