
Тиристорное управление электродвигателем кратко
Обновлено: 04.07.2024
Тиристор — устройство, обладающее свойствами полупроводника, в основе конструкции которого лежит монокристаллический полупроводник, имеющий три или больше p-n-переходов.
Его работа подразумевает наличие двух стабильных фаз:
Тиристоры — устройства, выполняющие функции силовых электронных ключей. Другое их наименование — однооперационные тиристоры. Данный прибор позволяет осуществлять регуляцию воздействия мощных нагрузок посредством незначительных импульсов.
Согласно вольт-амперной характеристике тиристора, увеличение силы тока в нём будет провоцировать снижение напряжения, то есть появится отрицательное дифференциальное сопротивление.
Кроме того, эти полупроводниковые устройства могут объединять цепи с напряжением до 5000 Вольт и силой тока до 5000 Ампер (при частоте не более 1000 Гц).
Тиристоры с двумя и тремя выводами пригодны для работы как с постоянным, так и с переменным током. Наиболее часто принцип их действия сравнивается с работой ректификационного диода и считается, что они являются полноценным аналогом выпрямителя, в некотором смысле даже более эффективным.
Разновидности тиристоров отличаются между собой:
- Способом управления.
- Проводимостью (односторонняя или двусторонняя).
Общие принципы тиристорного управления
В структуре тиристора имеется 4 полупроводниковых слоя в последовательном соединении (p-n-p-n). Контакт, подведённый к наружному p-слою — анод, к наружному n-слою — катод. Как результат, при стандартной сборке в тиристоре максимально может быть два управляющих электрода, которые крепятся к внутренним слоям. Соответственно подключённому слою проводники, по типу управления устройства делятся на катодные и анодные. Чаще используется первая разновидность.
Ток в тиристорах течёт в сторону катода (от анода), поэтому соединение с источником тока осуществляет между анодом и плюсовым зажимом, а также между катодом и минусовым зажимом.
Тиристоры с управляющим электродом могут быть:
Показательным свойством незапираемых приборов является отсутствие у них реакции на сигнал с управляющего электрода. Единственный способ закрыть их — снизить уровень протекающего сквозь них тока так, чтобы он уступал силе тока удержания.
Чтобы разобраться в данном моменте необходимо помнить, что у тиристора преимущественно имеется 3 вывода (тринистор): анод, катод и управляющий электрод.
Уэ (управляющий электрод) как раз таки и отвечает за то, чтобы включать и выключать тиристор. Открытие тиристора происходит при условии, что приложенное напряжение между А (анодом) и К (катодом) становится равным или превосходит объём напряжения работы тринистора. Правда, во втором случае потребуется воздействие импульса положительной полярности между Уэ и К.
При постоянной подаче питающего напряжения тиристор может быть открыт бесконечно долго.
Чтобы перевести его в закрытое состояние, можно:
- Снизить уровень напряжения между А и К до нуля;
- Понизить значение А-тока таким образом, чтобы показатели силы тока удержания оказались больше;
- Если работа цепи построена на действии переменного тока, выключение прибора произойдёт без постороннего вмешательства, когда уровень тока сам снизится до нулевого показания;
- Подать запирающее напряжение на Уэ (актуально только в отношении запираемых разновидностей полупроводниковых устройств).
Состояние закрытости тоже длится бесконечно долго, пока не возникнет запускающий импульс.



Общие сведения
Все современные технические решения образованы в начале второй половины XX века. Глупо считать учебники того времени устаревшими. Нельзя обойти благодарностью Шубенко В.А., Браславского И.Я. и остальной коллектив авторов, приготовивших для читателей столь замечательный материал.

Тиристоры так часто используются в регуляторах, что давно уже вытеснили транзисторы. Это объясняется высокими эксплуатационными и энергетическими характеристиками в роли управляемых вентилей. Основным преимуществом считается плавность настройки параметров. Хотя в ранних моделях и современных это реализуется принципиально иными путями. В результате привод характеризуется рядом положительных качеств:
- Повышенный КПД;
- Быстродействие;
- Резко очерченная форма управляющего сигнала;
- Дешевизна;
- Простота;
- Небольшие размеры.
Тиристорные регуляторы сегодня найдутся везде. В стиральных машинах изменяют плавно скорость вращения вала путём отсечки тока, в кухонных комбайнах по величине искрения подстраивают потребляемую мощность для стабилизации оборотов. Ранее тиристорные регуляторы применялись исключительно для асинхронных двигателей, преимущественно в паре с короткозамкнутым ротором. Сегодня принципиально новые технические решения намного раздвинули границы указанной отрасли. Уже в 60-е годы схемы применялись по двум направлениям:
- Настройка амплитуды питающего напряжения.
- Преобразование частоты питающего напряжения.

Первая методика считается универсальной и годится для абсолютного большинства двигателей. Вторая демонстрирует ограничения, на современном этапе в бытовых приборах встречается крайне редко, отвоевав сегмент среди промышленных применений. В домашнем оборудовании нынче применяется иная методика – отсечка тока (фазовый метод). Часть периода ключ пропускает переменное напряжение, в остальное время закрывается. Такой режим характеризуется минимальными затратами энергии при приемлемых характеристиках.
Конкретные способы тиристорного управления
Представляет собой подачу положительного напряжения изменяющейся величины на Уэ. Открытие тиристора происходит, когда величины напряжения довольно, чтобы пробиться через управляющий переход тока спрямления (Iспр.). При помощи изменения величины напряжения на Уэ, появляется возможность изменения времени открытия тиристора.
Главный недочёт этого метода — сильное влияние температурного фактора. Кроме того, для каждой разновидности тиристора потребуется резистор другого вида. Этот момент не добавляет удобства в эксплуатации. Помимо этого время открытия тиристора возможно корректировать лишь пока длится первая 1/2 положительного полупериода сети.
Заключается в смене фазы Uупр (в соотношении с напряжением на аноде). При этом применяется фазовращательный мост. Главный минус — малая крутизна Uупр, поэтому стабилизировать момент открытия тиристора можно лишь ненадолго.
Рассчитан на преодоление недостатков фазового метода. С этой целью на Уэ подаётся импульс напряжения с крутым фронтом. Данный подход в настоящее время наиболее распространён.
Управление скоростью вращения однофазных двигателей

Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.

Регулировать скорость вращения таких двигателей необходимо, например, для:
Тиристоры и безопасность
Из-за импульсности своего действия и наличия обратного восстановительного тока тиристоры очень сильно повышает риск перенапряжения в работе прибора. Помимо этого опасность перенапряжения в зоне полупроводника высока, если в других частях цепи напряжения нет вовсе.
Поэтому во избежание негативных последствий принято использовать схемы ЦФТП. Они препятствуют появлению и удержанию критический значений напряжения.
Двухтранзисторная модель тиристора
Из двух транзисторов вполне можно собрать динистор (тиристор с двумя выводами) или тринистор (тиристор с тремя выводами). Для этого один из них должен иметь p-n-p-проводимость, другой — n-p-n-проводимость. Выполнены транзисторы могут быть как из кремния, так и из германия.
Соединение между ними осуществляется по двум каналам:
- Анод от 2-го транзистора + Управляющий электрод от 1-го транзистора;
- Катод от 1-го транзистора + Управляющий электрод от 2-го транзистора.
Если обойтись без использования управляющих электродов, то на выходе получится динистор.
Совместимость выбранных транзисторов определяется по одинаковому объёму мощности. При этом показания тока и напряжения должны быть обязательно больше требуемых для нормального функционирования прибора. Данные по напряжению пробоя и току удержания зависят от конкретных качеств использованных транзисторов.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад если вы найдете на моем сайте еще что-нибудь полезное.
Частотное регулирование
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
Преобразователи для однофазных двигателей
Это модель Optidrive E2

Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:

Преимущества специализированного частотного преобразователя:
Минусы использования однофазного ПЧ:
Оптимальное быстродействие
В системах регулирования скорости промышленного назначения не отмечается трудностей с разгоном, который легко реализуется при помощи системы реле и многоступенчатых реостатов. Когда начинается торможение, требуется вычислить момент начала подачи управляющих сигналов для снижения негативных эффектов.
Указанную задачу решает специальный блок, занимающийся оценкой текущего состояния системы. Опытным путём рассчитывается схема торможения, в управляющее устройство закладывается готовый алгоритм. При помощи датчиков определяется рассогласование между текущим состоянием и моментом начала торможения. Среди данных появляются величины – угловой путь вала до останова и прочие.
Обратная связь по скорости нелинейна и, как правило, не может быть рассчитана, данные об этой зависимости вводятся в память вычислителя. Как результат, согласно имеющейся нагрузке и динамическим показателям системы вырабатывается команда останова в нужный момент времени. Учитываются факторы:
- Отсутствие перегрева обмоток импульсом тока останова.
- Минимизация отдачи в сеть реактивной мощности.
- Продление срока эксплуатации установки.
- Отсутствие условий для создания аварий и механических перегрузок.

В ходе разработки системы управления тиристорным регулятором учитывается факт невосприимчивости асинхронного двигателя к воздействующим факторам на низких оборотах. В этом случае требуется минимальное рассогласование по скорости между полями ротора и статора, обеспечивающими возникновение токов Фуко и, как следствие, наличие потокосцепления. Это существенное ограничение асинхронных двигателей, из-за которого их применение в быту сводится к минимуму.
Типичная схема использования
В большинстве случаев схема применения тиристорного регулятора остаётся прежней, мало меняющейся с годами:
- Программные установки (ПУ) в виде кода закладываются в память арифметического устройства (АУ) электронного блока. В стиральной машине это самая дорогая часть. Настолько, что замена часто нецелесообразна.
- Тиристорный регулятор служит вводным устройством (ВУ), куда поступает управляющий сигнал.
- Изменённое напряжение воздействует на сервисный привод (СП), обмотки двигателя, коллектор и пр. Линия обратной связи показывает, что малая нестабильность компенсируется непосредственно без участия центрального процессора. Выше уже говорилось про величину искрения.
- Механизм (М) отрабатывает команды. На валу стоит централизованный датчик положения (ЦДП), по которому процессор понимает, что происходит в результате подачи команд. При необходимости алгоритм корректируется.
До тиристорных регуляторов использовались генераторы с непосредственным управлением либо ртутные выпрямители, с легко изменяемыми характеристиками. Но указанные устройства работали лишь в паре с коллекторными двигателями. Следовательно, простота, дешевизна, неприхотливость асинхронных оказывались не востребованы до появления тиристорных регуляторов.
Тиристорные преобразователи позволяют подавать на двигатель импульсы электрического тока различной конфигурации. Характеристики и пропускная способность меняются в зависимости от спецификаций системы и самого устройства.

В последнее время промышленные системы, приводимые в движение электричеством, все чаще включают в себя тиристорный преобразователь для двигателя постоянного тока. Эти полупроводниковые вентили позволяют осуществлять управление приводом в значительном диапазоне: сила тока может превышать сотни ампер, а напряжение достигает 1000В и выше.
При своих повышенных технических показателях тиристорный электропривод отличается компактными габаритными размерами. При этом его быстродействие превышает аналогичные показатели у других систем похожего назначения, а диапазон рабочих температур позволяет эксплуатировать двигатель постоянного тока в окружающей среде от -60 до +60 по Цельсию.
Что такое тиристор
Тиристорная система – это частично управляемая система преобразования напряжения. Общая схема работы предполагает активацию привода в момент подачи потенциала необходимого уровня на управляющий электрод. Чтобы отключить тиристорный преобразователь двигателя постоянного тока, необходимо выполнить принудительный разрыв цепи. Это можно осуществить тремя способами:
- подать гасящее напряжение, имеющее значение, противоположное пусковому импульсу;
- отключить энергоснабжение всего привода;
- провести ток питания через ноль.
Скорость вращения электродвигателя зависит от среднего значения напряжения, уже прошедшего через выпрямитель. Тиристорный электропривод позволяет управлять моментом подачи основного потока выпрямленного напряжения и его задержкой. Регулируя момент подачи, можно осуществлять общее управление двигателем постоянного тока.

Общая классификация
Проведя исследование системы, предполагающей наличие тиристора, можно определить наиболее оптимальную схему включения. От выбранного типа запуска непосредственно зависит средний уровень напряжения, выдаваемого выпрямителем при условии отсутствия вмешательства со стороны оператора. В случаях, когда тиристор применяется для двигателя постоянного тока, используются два класса тиристорных преобразователей – мостовые и оснащенные выходом с нулевым значением.
Тиристорный преобразователь мостового типа, как правило, устанавливается в высокомощных системах. Это оптимально в силу того, что каждый такой тиристор может обладать меньшим уровнем напряжения, что позволяет распределить общую нагрузку между несколькими узлами и снизить нагрузку на каждый из них. Кроме того, выпрямленное через мостовой тиристор напряжение не будет иметь постоянную составляющую, что повышает стабильность работы при проходе электрического тока через преобразующие обмотки.
Еще одним отличием между разными классами тиристоров является количество фазовых выходов. Оборудование и приборы, имеющие малый уровень энергопотребления, требуют наличия у тиристора всего нескольких фаз. Если преобразователь спроектирован для работы в высоконагруженных комплексах, его конструкция может включать от 12 до 24 фазовых контактов.
Вне зависимости от выбранного типа активации и общей конструкции данная категория преобразователей напряжения будет иметь все преимущества использования тиристоров. Сюда входит полное отсутствие вращающихся деталей, которые ускоряют процесс износа и требуют периодической замены. Из этого вытекает другое преимущество – низкая инерционность. Главным отличием от простых электромеханических преобразователей электрического тока является компактность, что положительно влияет на совместимость с устройствами, где мало свободного места.
При всех своих преимуществах тиристорный преобразователь имеет ряд недочетов:
- если настройка напряжения проводится в сторону снижения, выходная мощность начинает падать пропорционально уменьшению энергоснабжения;
- при работе преобразователя создаются высшие гармоники, которые сразу попадают в сеть питания всей системы;
- тиристор жестко связан с цепью подачи питания, из-за чего малейший скачок напряжения сразу отзывается в системе. Изменение характеристик подаваемого на двигатель тока создает толчок оси, скачкообразно меняя скорость ее вращения, а это в свою очередь вызывает всплеск тока.
Эксплуатационные показатели электродвигателя, который работает в связке с тиристорным преобразователем, напрямую зависят от уровня напряжения, которое подается на якорь. Также важную роль играет создаваемая приводом нагрузка.

Типовая конструкция и принцип работы
Тиристором называется полупроводник, изготовленный из кремния. Как правило, он состоит из четырех токопроводящих слоев. Сборка проводится на медном основании, которое имеет шесть граней и хвостовик с нарезанной резьбой. Этот элемент дополняется основной структурой, в производстве которой применяется специальный кремний.
Четырехслойный пропускной комплекс имеет два выхода – управляющий и отрицательный. Снаружи вся конструкция защищена железным корпусом, имеющим форму цилиндра и оснащенным изоляционным слоем. При помощи резьбы тиристор устанавливается в специальное посадочное место и подключается к плюсовому полюсу цепи питания с анодным напряжением.
Управление работой
Общая схема действия заключается в прохождении через тиристор электричества под действием анодного напряжения. При этом величина напряжения на выходе зависит от показателей управляющего тока, который подается на контрольный электрод. Если подача управляющего тока прервана, анодное напряжение, выходящее к потребителю, начнет расти, при этом сохраняя низкую величину.
Когда входящее напряжение нарастает, объем тока, необходимого для открытия тиристора, уменьшается. Между этими показателями наблюдается прямая пропорция, которая прослеживается в любой конструкции тиристорного преобразователя.
Применение закона синуса для управления входящим напряжением также позволяет снизить уровень последнего. При этом управляющий ток снижается пропорционально импульсу, необходимому для открытия основного механизма. Сохранение постоянного управляющего напряжения не приводит к открытию тиристора в случае, когда его уровень ниже, чем у импульса управления.
Наращивание управляющего напряжения приводит к открытию тиристора при определенных условиях. Для этого необходимо обеспечить превышение показателя управляющего импульса. Используя возможность настройки характеристик управляющего импульса, можно менять угол открытия тиристора в диапазоне от нуля до 90 градусов.
В тех случаях, когда необходимо открыть тиристор на больший угол, управляющее напряжение меняется на переменное. В большинстве ситуаций амплитуда тока является синусоидальной. Когда напряжение достигает показателя, равного точке пересечения синусоидой величины управляющего импульса, происходит открытие тиристора.
Путем изменения интервала синуоиды в меньшую или большую сторону, также можно настраивать угол открытия пропускного механизма преобразователя. Данный тип управления работой тиристора называется горизонтальным и реализуется благодаря применению устройства под названием фазосмещатель. Обратный вид контроля – вертикальный – предполагает сдвиг синусоиды вверх либо вниз, что также приводит к изменению угла открытия проводника. Чтобы определить конечную величину, необходимую для воздействия на угол, необходимо выполнить вычисление суммы переменного управляющего напряжения и постоянного тока, формирующего синусоиду. Задать конкретный угол, на который необходимо открыть тиристор, возможно путем настройки постоянного напряжения.
Как только тиристор открыт на нужный угол, система сохраняет заданное положение, пока не будет окончен положительный полупериод. В этот промежуток времени управляющее напряжение не воздействует на функции проводника. Благодаря этой особенности становится возможным использование импульсного управления.
Импульсное управление заключается в подаче периодических волновых воздействий, равных по величине управляющему напряжению и имеющих положительный показатель. Для нормализации работы следует пускать импульсы в четко определенные моменты времени. Такой тип управления позволяет повысить четкость функционирования системы, в составе которой находится тиристорный преобразователь.
Путем изменения угла открытия тиристора можно настраивать форму импульсов, передаваемые на прибор-потребитель. Стоит учитывать, что такое управление приводит к изменению средневзвешенного уровня напряжения на зажимах потребляющего энергию устройства или механизма.

Использование трансформатора
Иногда для обеспечения более точного и стабильного управления работой тиристорных преобразователей используются сторонние узлы, например, трансформаторы. В этом случае первичная обмотка последних будет запитана непосредственно от питающей переменной сети. При этом вторичная обмотка будет включать в себя выпрямитель двухполупериодного типа, который обладает повышенным уровнем индуктивности в цепи, где присутствует постоянное напряжение.
С этим подходом становится возможным устранение эффекта пульсации тока, выпущенного из выпрямителя. Однако таким свойством обладают только двухполупериодные выпрямители, адаптированные под переменное напряжение. Амплитуда выпрямленного тока также должна соответствовать определенным характеристикам: в данном случае ее форма должна быть пилообразной либо прямоугольной. Поэтому выпрямитель также выполняет функцию преобразования формы переменного напряжения.
В процессе работы конденсаторы трансформатора попеременно получают электрический ток сразу двух форм. Прямоугольная амплитуда энергоснабжения наблюдается в заряжающих потоках. Обкладки в свою очередь накапливают пилообразный электрический ток, который впоследствии прикладывается к транзисторным базам. Если присутствует такой тип напряжения, то его классифицируют как опорное.
Каждый установленный в трансформаторе транзистор оснащен собственной базой, которая имеет выделенную цепь. В ней действует напряжение постоянного типа, которое приводит к появлению положительных потенциалов на всех транзисторных базах при условии, что пилообразный ток на обкладках конденсаторов равен нулю. При этом открытие транзисторов производится в момент образования на базе отрицательного потенциала.
Чтобы был запущен вышеописанный процесс, необходимо увеличить отрицательную величину опорного тока настолько, чтобы она превысила значение управляющего напряжения. Это производится в зависимости от текущего уровня последнего для определенного фазового угла. В этом случае время открытия транзистора будет напрямую зависеть от значения управляющего напряжения.
Если один или оба транзистора оказываются открытыми, вторая или третья первичные обмотки трансформаторной установки пропускают через себя импульс прямоугольной формы. В момент прохождения переднего фронта вторичная обмотка формирует объем электрического тока, который выбрасывается непосредственно на электрод тиристора, управляющий его открыванием.
Когда волна напряжения проходит и первичная обмотка задета задним фронтом импульса, во вторичной обмотке образуется такой же ток, но обратной полярности. Затем происходит замыкание этого напряжения на полупроводниковым диодом, который непрерывно проводит шунтирование вторичной обмотки трансформатора. В этом случае тиристорный преобразователь бездействует, так как не получает питание.
Если необходимо реализовать параллельное подключение тиристорного массива к двум трансформаторам, конфигурация схемы меняется. Для этого выполняется генерация двух импульсов с противоположными фазами, сдвиг которых равен 180 градусам.

Управление электродвигателем при помощи тиристора
Механизмы тиристорного контроля работы электромоторов работают по принципу регулировки уровня напряжения, подаваемого на якорь и сохраняющего постоянную частоту. С помощью этого меняется скорость вращения двигателя. Как правило, реализация такого комплекса производится через многофазное выпрямление электрического тока.
Типовая конструкция тиристорной системы управления включает в себя три таких узла, каждый из который последовательно подключен к якорю электродвигателя и вторичной обмоткой трансформаторной установки. При этом электродвижущая сила, генерируемая на последних, имеет сдвинутую фазу. Чтобы это компенсировать, в процессе настройки угла открытия тиристора на якорный комплекс мотора подается несколько пусковых импульсов, которые также смещены по фазе относительно друг друга.
В этой схеме якорь двигателя может получать как переменный, так и постоянный ток. Это зависит от того, насколько широко открыт тиристор в момент активации. Если необходимо включить многофазный реверсивный комплекс, конструкция будет включать в себя два тиристорных массива, промаркированных Т1-3 и Т4-6 соответственно. Изменение направления подачи напряжения происходит путем задействования одного из массивов, в результате чего якорь электродвигателя будет вращаться в ту или иную сторону.
В качестве альтернативного способа реверса мотора создана схема изменения направления движения электрических импульсов в обмотке возбуждения. Принцип действия будет несколько отличаться; также стоит принимать во внимание снижение коэффициента полезного действия. Это обеспечивает совместимость с двигателями, работающими в ограниченном диапазоне мощности, так как обмотки возбуждения имеют повышенный уровень индуктивности. В этом заключается их отличие от якорных обмоток, где этот показатель значительно ниже. Чаще всего такие приводы используются для приведения в действие станков для резки металла.
При помощи дополнительного массива тиристоров оператор электропривода может использовать торможение ротора, осуществив это также при помощи изменения направления электрической энергии. Помимо этого, тиристоры позволяют запускать и останавливать вращение ротора и ограничить интенсивность стартового импульса, который используется также для торможения. Благодаря этому отсутствует необходимость внедрения в электроцепь контакторов и реостатных устройств, регулирующих напряжение цепи в ручном режиме.
Применение тиристорного привода регулировки работы двигателя в сети постоянного тока может привести отсутствии выгоды интеграции силовых трансформаторных установок. Причина заключается в существенном увеличении габаритных размеров оборудования, управляемого по такому принципу. Кроме того, увеличивается итоговая стоимость комплектации, сборки и монтажа привода. Поэтому для оптимизации расходов и экономии свободного места часто применяется упрощенная схема.
Из этой статьи мы знаем, что тиристоры открываются импульсом тока, а для их закрытия нужно прекратить ток или приложить между анодом и катодом обратное напряжение. Кроме этого, нам известно, что тиристоры проводят ток в одном направлении, от анода к катоду, а управляющий сигнал должен быть положительным, относительно катода. То есть его полярность должна совпадать с полярностью приложенного к аноду напряжения. А также потенциал анода в момент открытия должен превышать потенциал катода. Симисторы работают точно так же, а состоят из двух тиристоров, соединённых встречно-параллельно (чуть позже мы разберём примеры).
В этой статье мы подробнее рассмотрим вопросы, связанные со способами и схемами управления тиристорами и симисторами.
Немного теории
Управлять тиристором не так просто как, например, mosfet’ами или IGBT-транзисторами, так как нужно учитывать ряд параметров и выполнять некоторые условия.
Начнём с понятия ток отпирания (он же ток управления, в англоязычных даташитах обозначается, как IGT) — это ток такой силы, который необходимо подать на управляющий электрод (УЭ), чтобы тиристор открылся в нормальном ключевом режиме. Обычно он находится в диапазоне от 0.1 до 1А. На мощных тиристорах, рассчитанных на тысячи ампер, он может быть и больше, но такое встречается редко.
Но даже если подать нужный ток на управляющий электрод тиристор не откроется, потому что по силовой цепи (анод-катод), должен протекать какой-то ток. Этот ток называется током удержания (Iуд в отечественных справочниках или IH в англоязычных даташитах). Это минимальный ток, который должен протекать через тиристор в момент открытия, а также для удержания в открытом состоянии в процессе работы. Обычно он находится в диапазоне от десятков миллиампер до сотен миллиампер (0.05…0.5А).
Ток удержания нужно учитывать не только при отпирании транзистора, но и при его запирании. Если ток в силовой цепи слишком маленький, то если тиристор был включён, а нагрузка по какой-то причине исчезла, то он закроется не полностью и перейдёт в активный режим. На ключе увеличится падение напряжения и выделяемая мощность, если в таком состоянии внезапно появится нагрузка, то он выйдет из строя. Поэтому в схемах с мощными тиристорами используются дополнительные решения для их защиты — отслеживания и контролирования этого тока.
Следующее важное условие сформировать нужную скорость роста тока управления — это обозначается, как dIG/dt , может отличаться для каждого конкретного тиристора, но в среднем оно должно быть больше, чем 2А/мкс.
Для чего это нужно? Допустим, у нас есть какой-то мощный тиристор, если подать на его управляющий электрод ток, который нарастает медленно или вовсе представляет собой стабильную ровную линию, то тиристор будет открываться медленнее, чем нужно. При этом начнёт протекать ток нагрузки, и, так как структура тиристора ещё не открылась полностью, область около УЭ начнёт греться, что может привести к её прожигу и прибор выйдет из строя.
Обозначение dI/dt похоже на предыдущее и можно запутаться. Обратите внимание, в предыдущем случае мы писали dI G /dt, где IG – ток управляющего электрода (G – gate), суть в том, что эти два вопроса тесно связаны между собой, и в сущности, описывают одно и то же явление, но с разных сторон.
Ну и наконец, нужно помнить, что, чтобы закрыть тиристор нужно прекратить ток через него. Это может сыграть и негативную роль, например, если у нагрузки не постоянный характер, и ток в ней может изменяться в процессе работы, то если он опустится ниже, чем ток удержания — тиристор может закрыться и отключить её. Это негативное явление, и в таких случаях нужно контролировать ток нагрузки и следить, чтобы транзистор не закрывался самопроизвольно. Такая коммутация называется естественной.
А чтобы повысить надёжность запирания в те моменты, когда это необходимо, то можно подать на него обратное напряжение — на катод условный плюс, а на анод условный минус. Такая коммутация называется искусственной.
Из этого следует, что тиристор можно использовать в цепи переменного тока, а в цепи постоянного тока он закрываться не будет. Для работы при постоянном токе используют транзисторы.
Безусловно, есть простые схемы регуляторов, где тиристоры подключаются на выход выпрямительного моста, но в этих схемах никогда не используется фильтров, и токи, с которыми работают такие схемы, обычно не превышают и десятка ампер. Поэтому тиристор успевает закрыться в момент, когда напряжение на нём равно нулю, то есть между полупериодами, такой пример мы рассмотрим далее.
Перейдём к практике
Выделяют такие способы управления тиристорами:
- Прямой, без гальванической развязки между силовой цепью и цепями управления.
- Оптический.
- Трансформаторный.
- С помощью источника тока.
Важно запомнить, что к полярности управляющего сигнала есть определённые требования: тиристору требуется положительное управляющее напряжение, приложенное относительно катода, а для симистора (симметричного тиристора) —сигнал управления должен быть таким же по полярности, как и в момент открытия на аноде (см. рисунок ниже).
Управление без гальванической развязки
Схема подключается в разрыв между нагрузкой и переменным сетевым напряжением. На тиристор подаётся выпрямленное пульсирующее напряжение. Включение происходит, когда на аноде тиристора есть какое-то напряжение, и нагрузка обеспечивает ток выше величины удержания.
Управление происходит путём подключения источника постоянного тока к управляющему электроду. Ток управления ограничивается резистором R1, R2 – шунтирует УЭ подтягивая его к минусу питания, когда SA1 разомкнут. Когда ключ SA1 замыкается, тиристор включается и через нагрузку начинает протекать ток.
В качестве ключа может быть использован транзистор, и управляться он может от микроконтроллера или миниатюрное реле.
У этой схемы есть масса недостатков:
• Тиристор может включиться в любой момент, если это произойдёт, когда на аноде высокое напряжение (оно здесь может достигать 310В), то будет всплеск тока и помехи.
• Даже если импульс управления подать точно перед началом нарастания напряжения от нуля, то ток нагрузки в этот момент может не достичь тока удержания тогда тиристор закроется сразу же после окончания импульса.
• Если такую схему использовать с транзистором и микроконтроллером, как упоминалось выше, то в случае, когда тиристор пробьёт из-за перенапряжения или он сгорит от перегрузки, то сетевой напряжение попадёт на управляющий транзистор. Если его переход тоже пробьёт, то высокое напряжение попадёт на выход микроконтроллера, и он выйдет из строя.
На практике сложно встретить такую схему как показана на рисунке ниже, значительно более распространён следующий вариант схемы управления без гальванической развязки.
Здесь к выходу диодного моста подключён и сам тиристор и цепь управления им. Управляющий электрод подключается к тому же источнику, что и анод тиристора. В целом схема работает аналогично предыдущей:
Закрывается он естественным образом, когда напряжение и ток снижается до нуля (между выпрямленными полуволнами). Для повышения стабильности работы УЭ подтянут к минусу питания через резистор R2.
Недостатки такие же.
Кстати, такую конструкцию можно уменьшить, если убрать диодный мост, а вместо тиристора использовать симистор.
Здесь также симистор подключается в разрыв между нагрузкой и источником питания, но уже не к выпрямленному, а к переменному напряжению. Как вы помните, на УЭ симистора подают напряжение и ток той же полярности что и на условном аноде . Так как УЭ подключён к тому же источнику питания, то и полярность управляющего напряжения совпадает и симистор будет нормально открываться.
Примечание: так как симистор – это два встречно параллельных тиристора, то у него и нет чёткого анода или катода. Анод всегда там, где приложен больший потенциал.
Закрываться симистор будет при переходе синусоиды через ноль, то есть на каждой половине периода. Чтобы это лучше понять вспомните, что симистор – это два тиристора соединённых встречно-параллельно. Когда синусоида проходит через ноль и к аноду открытого тиристора, пусть это будет VS1, прикладывается обратное напряжение, он закрывается, а ко второму тиристору (VS2) приложится прямое напряжение. Дальше всё повторяется, но с обратной полярностью, и так по кругу.
Давайте разберём эту схему по составляющим и её принцип работы.
Схему можно разделить на 2 части: силовую (симистор BT136) и управление (всё остальное)
Примечание: динистор, он же диодный тиристор по устройству такой же, как тиристор, но без управляющего электрода, он открывается сам, когда на аноде напряжение достигает какой-то пороговой величины — напряжения пробоя.
Элементы R3 и C3 необязательны в этой схеме, но они нужны для повышения стабильности работы.
Демпферная цепочка, состоящая из конденсатора C1 и резистора R4 защищает симистор BT136 от всплесков ЭДС-самоиндукции, если схема подключена в цепь с индуктивной нагрузкой, например, при регулировке оборотов электродвигателей, поэтому в дешёвых светорегуляторах её также может не быть.
Теперь о принципе работы:
Когда схема подключается к сети, начинают заряжаться C2 и C3 через цепочку резисторов R1, R2 и потенциометра. Когда на обкладках C2 и C3 напряжение достигнет величины в диапазоне от 28 до 36 вольт, то динистор DB3 откроется и подаст управляющий импульс на УЭ симистора. Последний откроется и через него начнёт протекать ток нагрузки.
Так как напряжение синусоидальное, ток нагрузки изменяется по такому же закону, когда напряжение приблизится к 0, а ток нагрузки станет меньше тока удержания, симистор закроется и отключит нагрузку.
Такой процесс повторяется каждую полуволну синусоиды, с отличием лишь в полярности напряжения на всех элементах. Продублируем иллюстрацию работы симистора, которую мы приводили ранее.
Как вы можете видеть симистор закрывается каждый раз, при переходе синусоиды проходит через ноль, и открывается при появлении напряжения на управляющем электроде.
И как же всё-таки регулирует мощность эта схема? Как мы уже разобрались выше – тиристор открывается, когда достигается определённое напряжение для открытия динистора DB3, который даёт импульс на управляющий электрод. Так как времязадающая цепь подключена к тому же источнику питания, что и силовая, то напряжение нагрузки априори синхронизировано с управляющей цепью.
Время, за которое достигается напряжение открытия DB3 задаётся RC цепочкой. Если в ней увеличить сопротивление R, то конденсатор C будет заряжаться дольше, соответственно нужное для открытия напряжение на нём появится позже.
На рассматриваемой схеме за регулировку времени открытия отвечает потенциометр R2. Изменяя его сопротивление, мы задаём время заряда и выбираем момент открытия симистора. Время от точки перехода синусоиды через ноль до момента включения тиристора измеряется в градусах и называется углом альфа, реже — углом среза фазы.
Эпюры напряжений на нагрузке в разных положениях регулятора
Из эпюр мы видим, что симистор открывается только на небольшом кусочке синусоиды, поэтому уменьшается действующее напряжение на нагрузке.
Это называется фазовым регулированием, а устройство с таким принципом регулирования – С истема И мпульсно- Ф азового У правления (СИФУ).
Процесс регулирования по такому принципу в англоязычной литературе называют Leading Edge Dimming, что переводится как диммирование по возрастающему (переднему) фронту фазы. Есть регуляторы, которые, наоборот, срезают заднюю часть синусоиды, но их мы рассматривать не будем.
Но это не единственный метод регулировки мощности нагрузки, есть ещё и так называемое целочисленное или широтно-импульсное управление (не путать с ШИМ), когда через тиристор или симистор включают нужное число полуволн и амплитудный метод.

При пуске электродвигателя происходит превышение потребления тока в 7 раз, что способствует преждевременному выходу из строя электрической и механической частей мотора. Для предотвращения этого следует применять регулятор оборотов электродвигателя. Существует много моделей заводского плана, но для того чтобы сделать такое устройство самостоятельно, необходимо знать принцип действия электродвигателя и способы регулирования оборотов ротора.
Общие сведения
Электродвигатели переменного тока получили широкое распространение во многих сферах жизнедеятельности человека, а именно — модели асинхронного типа. Основное назначение двигателя как электрической машины — трансформация электрической энергии в механическую. Асинхронный в переводе означает неодновременный, так как частота вращения ротора отличается от частоты переменного напряжения (U) в статоре. Существует две разновидности асинхронных двигателей по типу питания:
Однофазные применяются для домашних бытовых нужд, а трехфазные используются на производстве. В трехфазных асинхронных двигателях (далее ТАД) используются два вида роторов:
Замкнутые составляют около 95% от всех применяемых двигателей и обладают значительной мощностью (от 250 Вт и выше). Фазный тип конструктивно отличается от АД, но применяется достаточно редко по сравнению с первым. Ротор представляет собой стальную фигуру цилиндрической формы, которая помещается внутрь статора, причем на его поверхность напрессован сердечник.
Короткозамкнутый и фазный роторы
Впаянные или залитые в поверхность сердечника и накоротко замкнутые с торцов двумя кольцами высокопроводящие медные (для машин большой мощности) или алюминиевые стержни (для машин меньшей мощности) играют роль электромагнитов с полюсами, обращенными к статору. Стержни обмотки не имеют какой-либо изоляции, так как напряжение в такой обмотке нулевое.
Более часто используемый для стержней двигателей средней мощности алюминий отличается малой плотностью и высокой электропроводностью.
Для уменьшения высших гармоник электродвижущей силы (ЭДС) и исключения пульсации магнитного поля стержни ротора имеют определенным образом рассчитанный угол наклона относительно оси вращения. Если используется электромотор маленькой мощности, то пазы представляют собой закрытые конструкции, которые отделяют ротор от зазора с целью увеличения индуктивной составляющей сопротивления.
- Металлические или ступенчатые с ручным переключением.
- Жидкостные (за счет погружения на глубину электродов).
Щетки, выполненные из графита, изнашиваются, и некоторые модели оборудованы короткозамкнутым конструктивным исполнением, которое поднимает щетки и замыкает кольца после запуска мотора. АД с фазным ротором являются более гибкими в плане регулирования Iп.
Конструктивные особенности
Асинхронный двигатель не имеет выраженных полюсов в отличие от электромотора постоянного тока. Число полюсов определяется количеством катушек в обмотках неподвижной части (статор) и способом соединения. В асинхронной машине с 4-мя катушками проходит магнитный поток. Статор выполняется из листов спецстали (электротехническая сталь), сводящих к нулю вихревые токи, при которых происходит значительный нагрев обмоток. Он приводит к массовому межвитковому замыканию.
В электромоторах мощностью до 100 кВт применяется алюминий, обладающий незначительной плотностью — для заливки в пазы сердечника ротора. Но несмотря на такое устройство, двигатели этого типа греются. Для решения этой проблемы используются вентиляторы для принудительного охлаждения, которые насаживаются на вал. Эти двигатели просты и надежны. Однако двигатели потребляют при пуске большой ток, в 7 раз больше номинального. Из-за этого они имеют низкий пусковой момент, так как большая часть энергии электричества идет на нагрев обмоток.
Принцип работы
При протекании I по статорной обмотке в каждой из них создается магнитный поток (Ф). Эти Ф сдвинуты на 120 градусов относительно друг друга. Полученный Ф является вращающимся, создающим электродвижущую силу (ЭДС) в алюминиевых или медных проводниках. В результате этого и создается пусковой магнитный момент электромотора, и ротор начинает вращаться. Этот процесс называется еще в некоторых источниках скольжением (S), показывающим разность частоты n1 электромагнитного поля стартера, которое становится больше, чем частота, полученная при вращении ротора n2. Вычисляется в процентах и имеет вид: S = ((n1-n2)/n1) * 100%.
Методы настройки оборотов
Для предотвращения отрицательного влияния во время пуска нужно уменьшить обороты электродвигателя 220 в или 380 в. Существует несколько способов достижения этой цели:
- Изменение значения R цепи ротора.
- Изменение U в обмотке статора.
- Изменение частоты U.
- Переключение полюсов.
При изменении значения R роторной части при помощи дополнительных резисторов приводит к снижению частоты вращения, но в результате этого уменьшается мощность. Следовательно, получается значительная потеря электроэнергии. Этот тип регулирования следует применять для фазного ротора.
При изменении значений U на статорной катушке возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. Использование такого способа позволяет применять его только при вентиляторном характере нагрузки (например, регулятор оборотов вентилятора 220в). Для всех остальных случаев применяют трехфазные автоматические трансформаторы, позволяющие плавно изменять значения U, или тиристорные регуляторы.
Исходя из формулы зависимости частоты вращения от частоты питающего U можно производить регулирование количества оборотов ротора. Частота вращающегося магнитного поля статора вычисляется по формуле: Nст = 60 * f /p (f — частота тока питающей сети, p — число пар полюсов). Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
- В статор (в пазы) нужно уложить 2 обмотки с различным числом p.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Основным недостатком этого метода является поддержание ступенчатого характера изменения частоты электромотора с короткозамкнутым ротором.
Виды и критерии выбора
Для выбора регулятора нужно руководствоваться определенными характеристиками для конкретного случая. Среди всех критериев можно выбрать следующие:
- По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.
- Мощность является основным параметром, от которого нужно отталкиваться.
- По диапазону U.
- По диапазону частот. Нужно выбирать модель, которая соответствует требованиям пользователя для конкретного случая.
- Прочие характеристики, в которые включены гарантия, габариты, комплектация.
Кроме того, регулятор подбирается мощнее, чем сам электродвигатель по формуле: Pрег = 1,3 * Pдвиг (Pрег, Pдвиг — мощность регулятора и двигателя соответственно). Его нужно выбирать на разные диапазоны U, так как универсальность играет важную роль.
Устройство на тиристорах
В этой модели, представленной на схеме 1, применяются 2 тиристора, включенных встречно-параллельно, хотя их можно заменить одним симистором.
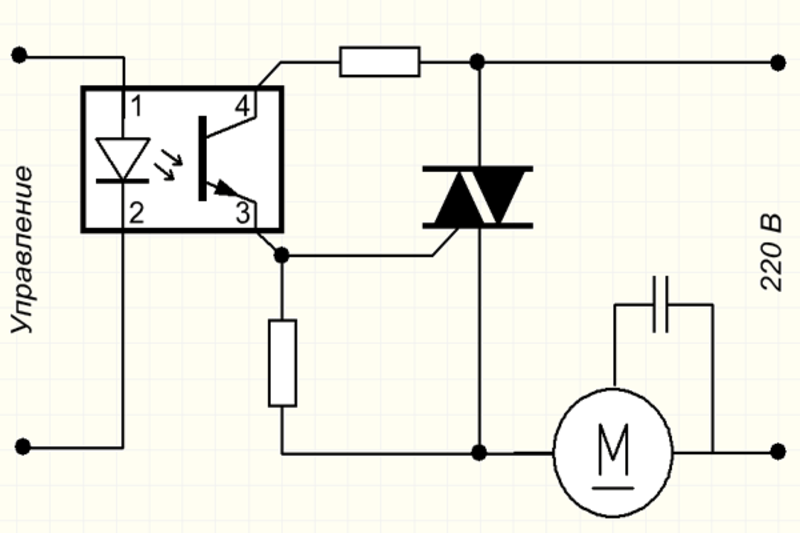
Схема 1 — Тиристорная регулировка оборотов коллекторного двигателя без потери мощности.
Эта схема производит регулирование с помощью открытия или закрытия тиристоров (симистора) при фазовом переходе через нейтраль. Для корректного управления коллекторным двигателем применяют следующие способы модификации схемы 1:
- Установка защитных LRC-цепей, состоящих из конденсаторов, резисторов и дросселей.
- Добавление на входе емкости.
- Использование тиристоров или симистора, ток которых превышает номинальное значение силы тока двигателя в диапазоне от 3..8 раз.
Этот тип регуляторов имеет достоинства и недостатки. К первым относятся низкая стоимость, маленький вес и габариты. Ко вторым следует отнести следующие:
- применение для моторов небольшой мощности;
- происходит шум и рывки мотора;
- при использовании схемы на симисторах происходит попадание постоянного U на двигатель.
Этот тип регулятора ставится в вентиляторы, кондиционеры, стиральные машины и электродрели . Отлично выполняет свои функции, несмотря на недостатки.
Транзисторный тип
Еще одним названием регулятора транзисторного типа является автотрансформатор или ШИМ-регулятор (схема 2). Он изменяет номинал U по принципу широтно-импульсной модуляции (ШИМ) при помощи выходного каскада, в котором применяются транзисторы типа IGBT.
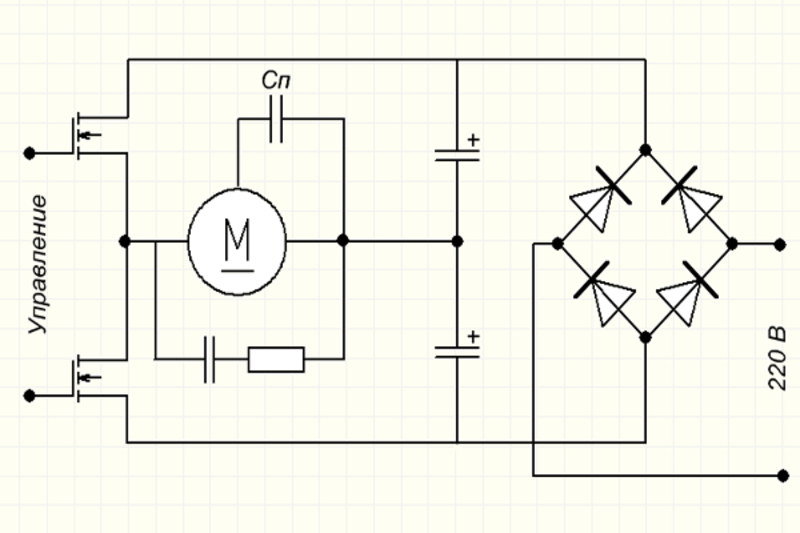
Схема 2 — Транзисторный ШИМ-регулятор оборотов.
Коммутация транзисторов происходит с высокой частотой и благодаря этому можно изменить ширину импульсов. Следовательно, при этом изменится и значение U. Чем длиннее импульс и короче паузы, тем выше значение U и наоборот. Положительные аспекты применения этой разновидности следующие:
- Незначительный вес прибора при низких габаритах.
- Довольно низкая стоимость.
- При низких оборотах отсутствие шума.
- Управление за счет низких значений U (0..12 В).
Основной недостаток применения заключается в том, что расстояние до электромотора должно быть не более 4 метров.
Регулирование за счет частоты

Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
- Специализированные однофазные.
- Трехфазные без конденсатора.
Для регулирования оборотов используется конденсатор, включенный с обмотками однофазного двигателя (схема 3). Этот преобразователь частоты (ПЧ) имеет емкостное R, которое зависит от частоты протекающего переменного тока. Выходной каскад такого ПЧ выполнен на IGBT-транзисторах.
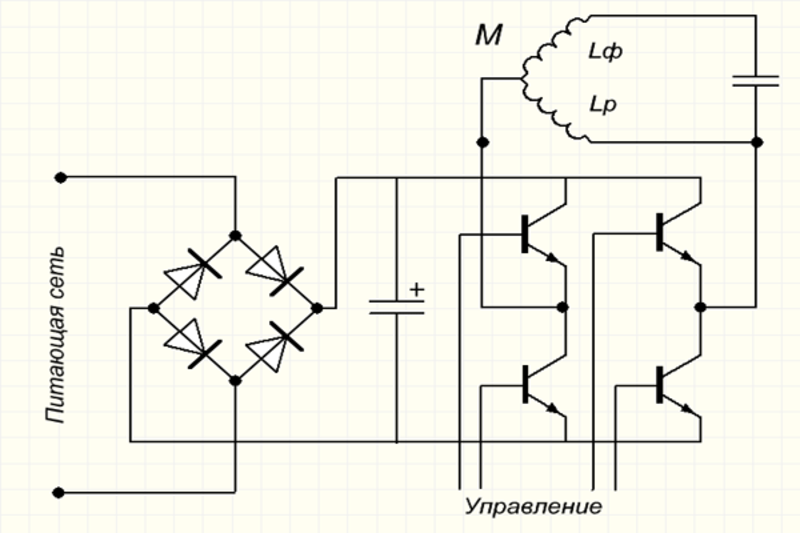
Схема 3 — Частотный регулятор оборотов.
У специализированного ПЧ есть свои преимущества и недостатки. Преимуществами являются следующие:
- Управление АД без участия человека.
- Стабильность.
- Дополнительные возможности.
Существует возможность управлять работой электромотора при определенных условиях, а также защита от перегрузок и токов КЗ. Кроме того, возможно расширять функционал при помощи подключения цифровых датчиков, мониторинга параметров работы и использования PID-регулятора. К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
Для трехфазных АД применяются также устройства регулирования частоты (схема 4). Регулятор имеет на выходе три фазы для подключения электромотора.
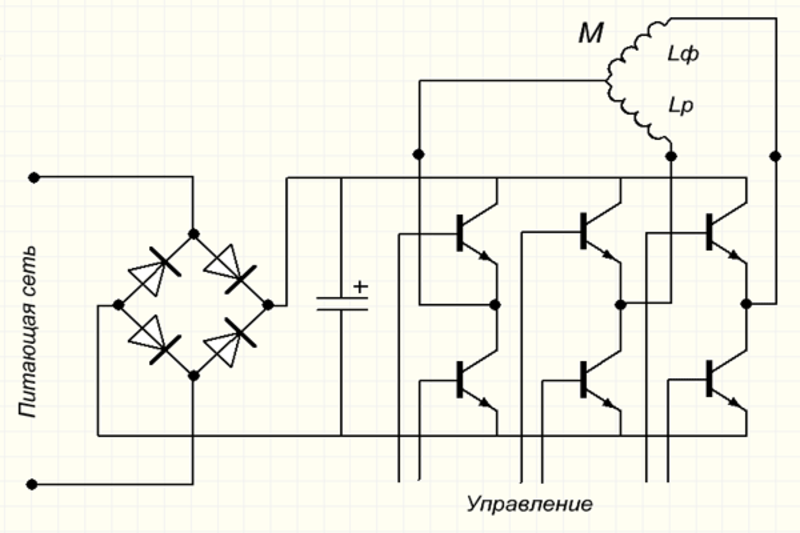
Схема 4 — ПЧ для трехфазного двигателя.
У этого варианта тоже есть свои сильные и слабые стороны. К первым можно отнести следующие: низкую стоимость, выбор мощности, широкий диапазон частотной регуляции, а также все преимущества однофазных преобразователей частоты. Среди всех отрицательных сторон можно выделить основные: предварительный подбор и нагрев при пуске.
Изготовление своими руками
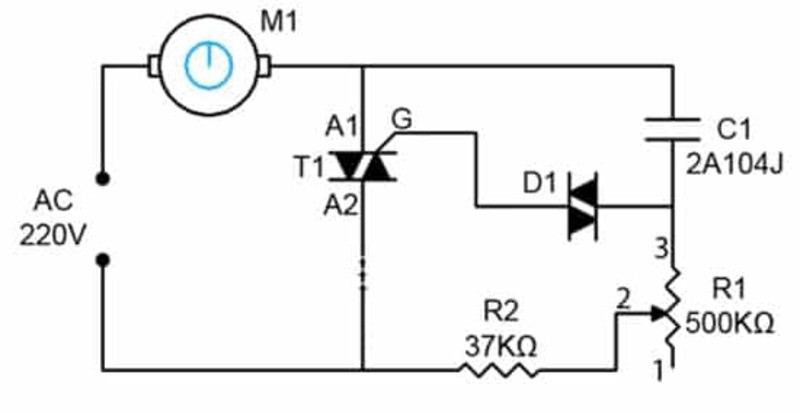
Схема 5 — Простой регулятор оборотов на симисторе.
Этот регулятор может быть использован и для регулировки оборотов двигателя постоянного тока 12 вольт, так как является довольно простым и универсальным. Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Существует еще одна схема. Она работает немного по-другому: путем обеспечения хода энергии обратного типа, которое является оптимально выгодным. В схему включен довольно мощный тиристор.
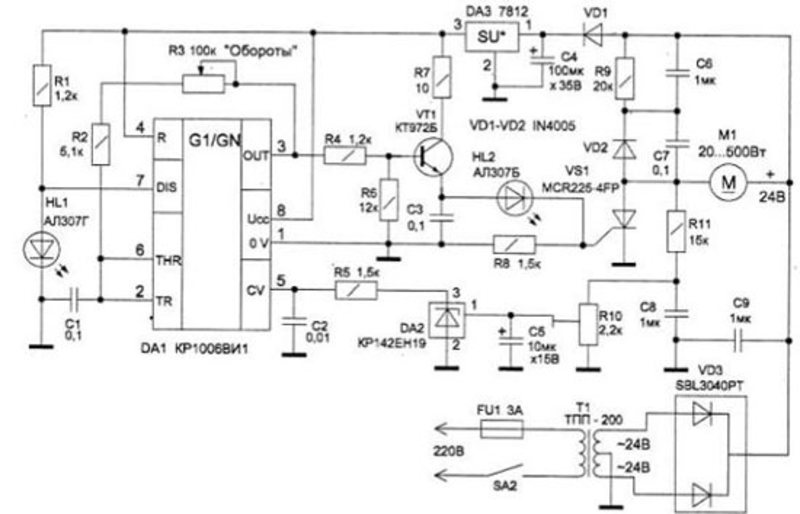
Схема 6 — Устройство тиристорного регулятора.
Схема состоит из генератора сигнала управления, усилителя, тиристора и участка цепи, выполняющего функции стабилизатора вращения ротора.
Наиболее универсальной схемой является регулятор на симисторе и динисторе (схема 7). Он способен плавно убавить скорость вращения вала, задать реверс двигателю (изменить направление вращения) и понизить пусковой ток.
Принцип работы схемы:
- С1 заряжается до U пробоя динистора D1 через R2.
- D1 при пробитии открывает переход симистора D2, который отвечает за управление нагрузкой.
Напряжение при нагрузке прямо пропорционально зависит от частотной составляющей при открытии D2, зависящего от R2. Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Таким образом, при выборе регулятора оборотов электродвигателя возможна покупка заводского или изготовление своими руками. Самодельный регулятор сделать достаточно просто, так как при понимании принципа действия устройства можно с легкостью собрать его. Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Читайте также: