
Системы координат в фотограмметрии кратко
Обновлено: 02.07.2024
В фотограмметрии обычно используют следующие системы координат.
Для определения положения точки на снимке, как уже описывалось в части II, применяют правую плоскую прямоугольную си-
стему координат снимка о'ху (рис. 12.1). Началом системы координат является точка о' — точка пересечения прямых, соединяющих координатные метки снимка 1—2 и 3—4, Ось х совпадает с прямой 1—2, а ее положительное направление — с направлением полета. Ось у перпендикулярна оси х и проходит через о'. Координаты точек (х, у), измеренные в системе координат снимка, называют плоскими координатами.
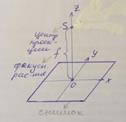
Для определения положения центра проекции S относительно снимка используют пространственную систему координат снимка o'xyz (рис. 12.2). В этом случае начало системы координат и оси х и у те же, что и в плоской системе координат снимка. Ось o'z перпендикулярна плоскости снимка и дополняет систему до правой.
Взаимное положение точек местности определяют в пространственной фотограмметрической системе координат. Это правая система координат. Начало системы и направления координатных осей выбирают произвольно. Часто начало системы координат совмещают с центром проекции S— SXYZvuivi с какой-либо точкой местности М— MXYZ. Плоскость XYпринимают горизонтальной или параллельной плоскости снимка (рис. 12.3).
Положение точек местности определяют в левой геодезической системе прямоугольных координат Гаусса— О Г Х г Y r Z r . Начало геодезической системы координат О г находится в точке пересечения осевого меридиана данной зоны и экватора. Плоскость X r Y r — горизонтальная. Ось Y T направлена на восток, ось Х г — на север (рис. 12.4). Условная геодезическая система координат может иметь началом любую точку местности, а ее оси сонаправлены соответствующим осям системы координат Гаусса (рис. 12.5).
ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ ОДИНОЧНОГО СНИМКА
Различают элементы внутреннего и внешнего ориентирования снимка.
Элементы внутреннего ориентирования определяют положение центра проекции S относительно снимка. Ими являются координаты точки S в пространственной системе координат снимка (рис. 12.6, а). Поскольку проекцией точки S на плоскости снимка является главная точка о, то их плановые координаты хи^в системе координат снимка совпадают, аппликатой точки S является расстояние So, т. е. фокусное расстояние АФА/ Таким образом, элементами внутреннего ориентирования снимка являются координаты главной точки снимка хь, уо и фокусное расстояние АФА / Эти элементы почти всегда известны с высокой точностью и записаны в паспорте АФА. Например,/= 100,020 мм; xq = -0,012 мм; у0 = +0,023 мм.
Элементы внутреннего ориентирования снимка формируют связку проектирующих лучей, существовавшую при съемке. Ее положение в пространстве определяют элементы внешнего ориентирования снимка. Их шесть. Это три линейных элемента — гео- координаты центра проекции S (Xs, Ys, Zs) и три угловых элемента наклона и поворота снимка (рис. 12.6, б):
а — продольный угол наклона снимка (угол между осью Z и проекцией главного луча на плоскость XZ);
со — поперечный угол наклона снимка (угол между главным лучом и проекцией главного луча на плоскость XZ);
ае — угол поворота снимка (угол на снимке между осью у и следом сечения плоскости снимка с плоскостью, построенной на главном луче и оси Y).
В аналитической фотограмметрии горизонтальным снимком называют снимок, все три угла наклона и поворота которого равны нулю, т. е. а = со = ае = 0.
Следует заметить, что для всех снимков, полученных данным АФА, элементы внутреннего ориентирования можно считать постоянными известными величинами. Однако элементы внешнего ориентирования у каждого снимка свои и, как правило, неизвестны.
Задачу по определению геодезических координат точки местности по измеренным координатам ее изображения на снимке называют прямой фотограмметрической засечкой.
ЦИФРОВЫЕ МОДЕЛИ РЕЛЬЕФА
Цифровая модель рельефа (ЦМР) — это цифровое представление земной поверхности как непрерывного явления, описывающее ее с определенной точностью. Под ЦМР понимают множество точек с известными геодезическими координатами (X е , У, 2Т) и правило определения высоты Z? любой другой точки, не входящей в это множество. Точки с известными геодезическими координатами в данном случае принято называть высотными пикетами. Правило определения высоты называют правилом интерполяции высот, или аналитической моделью рельефа (AMP).
Методы построения цифровых моделей рельефа различаются по схемам расположения высотных пикетов и по способам интерполяции высот в промежутках между ними.
По схемам расположения высотных пикетов ЦМР делят на регулярные, полурегулярные и структурные.
В регулярных моделях высотные пикеты расположены в узлах сеток квадратов, прямоугольников или равносторонних треугольников (рис. 12.7). Недостатком этих моделей является то, что наиболее значимые точки рельефа, находящиеся на линиях тальвегов и водоразделов, перегибах скатов, могут оказаться между узлами сетки и не отобразиться на ЦМР. В связи с этим важно выбрать оптимальный шаг сетки, так как с его увеличением возрастают погрешности ЦМР, а с уменьшением — объем ЦМР, время и средства на ее создание.
В полурегулярных моделях (рис. 12.8) высотные пикеты располагают на поперечниках к заданным линиям. Пикеты могут находиться на поперечниках либо на одинаковых расстояниях дру друга, либо на перегибах скатов. Полурегулярные ЦМР в основном используют при проектировании трасс линейных сооружений (дорог, линий электропередач, нефте- и газопроводов и т. п.).
Рис. 12.8. Полурегулярная цифровая модель рельефа
Для наиболее правильного описания характера рельефа меньшим числом высотных пи-
кетов создают структурные ЦМР(рис. 12.9). В этих моделях положение высотных пикетов определяется структурой рельефа —их выбирают в его характерных точках.
Координаты высотных пикетов, используемых для построения ЦМР,могут быть получены в результате полевых геодезических измерений, по топографическим картам, по результатам воздушного и космического лазерного сканирования, путем стереофото-грамметрической обработки снимков.
Для определения отметок точек, находящихся между высотными пикетами, применяют различные способы линейного и нелинейного интерполирования.
При использовании регулярных ЦМРс малым шагом сетки отметки промежуточных точек можно определить двойным линейным интерполированием (рис. 12.10).
Высота /-Й точки с плановыми координатами (Х„ Yj) может быть определена с использованием полинома первой, второй и реже третьей степени. Например,
В фотограмметрии обычно используют следующие системы координат.
Для определения положения точки на снимке, как уже описывалось в части II, применяют правую плоскую прямоугольную си-
стему координат снимка о'ху (рис. 12.1). Началом системы координат является точка о' — точка пересечения прямых, соединяющих координатные метки снимка 1—2 и 3—4, Ось х совпадает с прямой 1—2, а ее положительное направление — с направлением полета. Ось у перпендикулярна оси х и проходит через о'. Координаты точек (х, у), измеренные в системе координат снимка, называют плоскими координатами.
Для определения положения центра проекции S относительно снимка используют пространственную систему координат снимка o'xyz (рис. 12.2). В этом случае начало системы координат и оси х и у те же, что и в плоской системе координат снимка. Ось o'z перпендикулярна плоскости снимка и дополняет систему до правой.
Взаимное положение точек местности определяют в пространственной фотограмметрической системе координат. Это правая система координат. Начало системы и направления координатных осей выбирают произвольно. Часто начало системы координат совмещают с центром проекции S— SXYZvuivi с какой-либо точкой местности М— MXYZ. Плоскость XYпринимают горизонтальной или параллельной плоскости снимка (рис. 12.3).
Положение точек местности определяют в левой геодезической системе прямоугольных координат Гаусса— О Г Х г Y r Z r . Начало геодезической системы координат О г находится в точке пересечения осевого меридиана данной зоны и экватора. Плоскость X r Y r — горизонтальная. Ось Y T направлена на восток, ось Х г — на север (рис. 12.4). Условная геодезическая система координат может иметь началом любую точку местности, а ее оси сонаправлены соответствующим осям системы координат Гаусса (рис. 12.5).
ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ ОДИНОЧНОГО СНИМКА
Различают элементы внутреннего и внешнего ориентирования снимка.
Элементы внутреннего ориентирования определяют положение центра проекции S относительно снимка. Ими являются координаты точки S в пространственной системе координат снимка (рис. 12.6, а). Поскольку проекцией точки S на плоскости снимка является главная точка о, то их плановые координаты хи^в системе координат снимка совпадают, аппликатой точки S является расстояние So, т. е. фокусное расстояние АФА/ Таким образом, элементами внутреннего ориентирования снимка являются координаты главной точки снимка хь, уо и фокусное расстояние АФА / Эти элементы почти всегда известны с высокой точностью и записаны в паспорте АФА. Например,/= 100,020 мм; xq = -0,012 мм; у0 = +0,023 мм.
Элементы внутреннего ориентирования снимка формируют связку проектирующих лучей, существовавшую при съемке. Ее положение в пространстве определяют элементы внешнего ориентирования снимка. Их шесть. Это три линейных элемента — гео- координаты центра проекции S (Xs, Ys, Zs) и три угловых элемента наклона и поворота снимка (рис. 12.6, б):
а — продольный угол наклона снимка (угол между осью Z и проекцией главного луча на плоскость XZ);
со — поперечный угол наклона снимка (угол между главным лучом и проекцией главного луча на плоскость XZ);
ае — угол поворота снимка (угол на снимке между осью у и следом сечения плоскости снимка с плоскостью, построенной на главном луче и оси Y).
В аналитической фотограмметрии горизонтальным снимком называют снимок, все три угла наклона и поворота которого равны нулю, т. е. а = со = ае = 0.
Следует заметить, что для всех снимков, полученных данным АФА, элементы внутреннего ориентирования можно считать постоянными известными величинами. Однако элементы внешнего ориентирования у каждого снимка свои и, как правило, неизвестны.
Задачу по определению геодезических координат точки местности по измеренным координатам ее изображения на снимке называют прямой фотограмметрической засечкой.
ЦИФРОВЫЕ МОДЕЛИ РЕЛЬЕФА
Цифровая модель рельефа (ЦМР) — это цифровое представление земной поверхности как непрерывного явления, описывающее ее с определенной точностью. Под ЦМР понимают множество точек с известными геодезическими координатами (X е , У, 2Т) и правило определения высоты Z? любой другой точки, не входящей в это множество. Точки с известными геодезическими координатами в данном случае принято называть высотными пикетами. Правило определения высоты называют правилом интерполяции высот, или аналитической моделью рельефа (AMP).
Методы построения цифровых моделей рельефа различаются по схемам расположения высотных пикетов и по способам интерполяции высот в промежутках между ними.
По схемам расположения высотных пикетов ЦМР делят на регулярные, полурегулярные и структурные.
В регулярных моделях высотные пикеты расположены в узлах сеток квадратов, прямоугольников или равносторонних треугольников (рис. 12.7). Недостатком этих моделей является то, что наиболее значимые точки рельефа, находящиеся на линиях тальвегов и водоразделов, перегибах скатов, могут оказаться между узлами сетки и не отобразиться на ЦМР. В связи с этим важно выбрать оптимальный шаг сетки, так как с его увеличением возрастают погрешности ЦМР, а с уменьшением — объем ЦМР, время и средства на ее создание.
В полурегулярных моделях (рис. 12.8) высотные пикеты располагают на поперечниках к заданным линиям. Пикеты могут находиться на поперечниках либо на одинаковых расстояниях дру друга, либо на перегибах скатов. Полурегулярные ЦМР в основном используют при проектировании трасс линейных сооружений (дорог, линий электропередач, нефте- и газопроводов и т. п.).
Рис. 12.8. Полурегулярная цифровая модель рельефа
Для наиболее правильного описания характера рельефа меньшим числом высотных пи-
кетов создают структурные ЦМР(рис. 12.9). В этих моделях положение высотных пикетов определяется структурой рельефа —их выбирают в его характерных точках.
Координаты высотных пикетов, используемых для построения ЦМР,могут быть получены в результате полевых геодезических измерений, по топографическим картам, по результатам воздушного и космического лазерного сканирования, путем стереофото-грамметрической обработки снимков.
Для определения отметок точек, находящихся между высотными пикетами, применяют различные способы линейного и нелинейного интерполирования.
При использовании регулярных ЦМРс малым шагом сетки отметки промежуточных точек можно определить двойным линейным интерполированием (рис. 12.10).
Высота /-Й точки с плановыми координатами (Х„ Yj) может быть определена с использованием полинома первой, второй и реже третьей степени. Например,
Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим.
Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций.

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого.

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни.
Внутренние. К ним относится плоская прямоугольная система координат снимка (ОХY). Служит для определения положения точек на снимке.
Начало системы совмещено с точкой пересечения линий, соединяющих противоположные координатные метки, ось Х направлена вдоль базиса фотографирования. Y перпендикулярен Х. Эта сис-ма называется правой (переход от Х к Y против часовой стрелки). Желательно чтобы S (центр проекции/задняя узловая точка объектива), попадало в О (центр системы или главная точка картины). Смещение S учитывается и указывается в паспорте фотоаппарата (xs;ys).

Пространственная прямоугольная сис-ма координат. Используется для определения пространствен. координат точек и положения центра проекции S (ОХYZ).
Внешние. Пространственная фотограмметрическая сис-ма координат пары снимков или базисная система координат пары снимков. 2 снимка = стереопара. Используют для определения взаимного положения точек местности. Это правая система координат. Начало системы и направление координатных осей выбирается произвольно, часто начало координат совмещают с S.

Пространственная фотограмметрическая сис-ма координат маршрута или модель маршрута. То же что и пары снимков

Геодезическая система прямоугольных координат Гаусса.Для определения положения точек на местности. Начало системы координат в пересечении осевого меридиана данной зоны и экватора. Yг направлена на восток, Хг – на север. Есть условная геодезическая система прямоугольных координат, ее началом может быть любая точка местности, а оси направлены как в сис-ме Гаусса.

29. Плоская и пространственная системы координат снимка.См. вопрос 28
Применяемые в фотограмметрии координатные системы можно условно разделить на две группы, различающиеся областью применения, выбором начала координат и направлениями координатных осей.
Координатные системы местностииспользуются для определения пространственного положения точек местности. К таким системам относятся как левые геодезические (Гаусса, UTM, местная и др.), так и правые фотограмметрические.
Напомним, что в левой (французской) координатной системе последовательное преобразование осей X —>Y —>Z —>X выполняется путем вращения их по часовой стрелке; в правой (английской) системе тот же результат достигается при вращении против часовой стрелки.
Геоцентрическая система координат O'X'Y'Z' (рис. 3.1) используется при решении фотограмметрических задач на большие расстояния, при выполнении космических исследований и т. п. Ее начало О' совпадает с центром земного эллипсоида, ось O'Z' направлена вдоль его оси вращения, плоскость O'X'Y' располагается в плоскости экватора, ось О'Х' установлена в плоскости начального меридиана. Положение точки земной поверхности А в этой системе определяется прямоугольными координатами X' = А"А', У = О'А", Z' = А А.
 |
| Рис. 3.1. Геоцентрическая Рис. 3.2. Геодезическая (а) и фотограм система координат метрическая (б) системы координат |
Система координат Гаусса OrXrYrZr (рис. 3.2) используется для определения положения пунктов опорной геодезической сети и представления результатов фотограмметрической обработки материалов аэрофотосъемки. Ее начало Ог совмещено с точкой пересечения осевого меридиана зоны и экватора, ось ОгХг - с осевым меридианом, а ось OrYr направлена на восток. Положение точки местности А характеризуется координатами Хг = A"A',Yr = OpA", Zv = A A.
Начало местной системы координат совмещается с произвольной точкой От, а оси ОтХт, OmYm и OmZm параллельны соответствующим осям системы координат Гаусса. Положение точек в этой системе определяется пространственными координатами Xmt Ym и Zm.
Фотограмметрическая система координат OXYZ (рис. 3.2) выбирается так, чтобы зависимости между координатами соответственных точек снимка и местности имели наиболее простой вид. Ее начало совмещается с произвольной точкой (например, с точкой местности А или с центром проекции), а координатные оси направляются так, чтобы система оставалась прямоугольной и правой. Чаще всего ось ОХ совмещают с направлением маршрута. Положение точек в фотограмметрической системе определяется координатами X, Y и Z.
Координатные системы аэроснимкапредназначены для определения положения точек аэроснимков, являются прямоугольными, правыми и делятся на внутренние и внешние. Внешние координатные системы являются пространственными, а их начало совмещено с центром проектирования. Внутренние системы - плоские, с началом в точке пересечения линий, соединяющих координатные метки снимка.
Плоская прямоугольная координатная система оху является внутренней и используется для определения положения точек аэроснимка (рис. 3.3, а, б). Ее начало совмещено с точкой пересечения линий 1-2 и 3-4, соединяющих противоположные механические координатные метки, ось ох - с линией 1-2 (рис. 3.3, а) или параллельно ей (рис. 3.3, б), а ось оу устанавливают перпендикулярно оси х. Положение точки т аэроснимка определяется координатами хт, ут.
Иногда ось ох совмещают с главной вертикалью, а ось оу - с горизонталью, проходящей через главную точку снимка, точку нулевых искажений или точку надира. Начала координат в этих случаях совмещают с главной точкой, точкой нулевых искажений и точкой надира соответственно.
 |
обе Рис. 3.3. Внутренние координатные системы аэроснимка
Если главная точка аэроснимка не совпадает с точкой пересечения координатных меток (рис. 1.7), то координаты произвольной точки аэроснимка в системе оху (рис. 3.3, а, б):
X
Хо, Ут = У-Уо>
где х, у - измеренные координаты точки аэроснимка, a xQ, yQ - координаты главной точки аэроснимка (§ 8).
Последние модели аэрокамер имеют в плоскости прикладной рамки оптические координатные метки (рис. 1.8, 3.4,) или сетку крестов, координаты которых, найденные при калибровке аэрокамеры, являются носителями информации о координатной системе аэроснимка оху. Наличие точных координат таких меток (крестов) обеспечивает аналитическое определение начала системы и положение ее координатных осей оху в порядке, указанном в главе 13; особенности использования системы координат цифрового снимка рассмотрены в главе 14.
Полярная система координат огер (рис. 3.3, в) является также внутренней, применяется при анализе изображения на аэроснимке и реализуется в конструкциях ряда фотограмметрических приборов. Ее начало совпадает с точкой пересечения линий, соединяющих противоположные координатные метки, полярная ось - с главной вертикалью iv0 а ее положительное направление размещено в правой части снимка. Полярный угол ф отсчитывается от положительного направления главной вертикали против часовой стрелки.
Промежуточная система координат Sxyz (рис. 3.5) является внешней и пространственной. Ее начало размещено в центре проекции S, ось Sz совмещена с продолжением главного оптического луча, а оси Sx и Sy параллельны соответствующим осям системы координат аэроснимка оху (рис. 3.3). В этой системе координатами точки аэроснимка т являются величины хт, ут, игт = -f.
 |
| г | е | ®\ |
| г | ф | |
| е | е | ф |
А) б)
Рис. 3.4. Размещение четырех (а) и восьми (б) оптических координатных меток снимка

Рис. 3.5. Промежуточная система координат
К внешним относится также промежуточная система координат SXYZ (рис. 3.5), оси которой параллельны соответствующим осям фотограмметрической системы координат OXYZ (рис. 3.2, б).
В моих предыдущих статьях я всегда пропускал введение в фотограмметрию, потому что существует множество ознакомительных инструкций. Однако недавно я заметил, что большинство из них не рассматривает подробно, как нужно правильно снимать изображения. Поэтому я решил создать собственное руководство обо всём, что знаю в фотограмметрии.
Эта статья предназначена для следующих категорий пользователей:
- Тех, кто никогда не использовал фотограмметрию или 3D-сканирование.
- Тех, кто уже пользовался фотограмметрией, читал вводные инструкции и хочет улучшить качество сканирования.
- Тех, кто уже всё это знает, но хочет проверить, не пропустил ли чего-нибудь.
Выражаю особую благодарность Югославу Пендичу (Jugoslav Pendić) за редактирование и дополнение этой статьи. Ещё я благодарю команду, занимающуюся 3D-сканированием, за ликвидацию пробелов в моих знаниях.
Что такое фотограмметрия?
Если вы читаете эту статью, то, надеюсь, вы уже знаете, что такое фотограмметрия. Если вкратце, то это процесс создания 3D-моделей из нескольких изображений одного объекта, сфотографированного с разных углов.
Хотя эта техника совсем не нова, она намного старее современного процесса, и она широко использовалась в картографии и геодезии. Она стала более популярной благодаря доступности из-за увеличения мощности компьютеров, что позволило ей распространиться в другие области, такие как видеоэффекты и разработка игр.
Если вы хотите быстро ознакомиться с началами фотограмметрии, рекомендую изучить следующие материалы:
-
, короткие видео Джеймса Кэнди (James Candy). , Бертран Бенуа (Bertrand Benoit). .
Программное обеспечение
Существует множество программ для фотограмметрии, которые можно использовать для обработки снятых изображений. Обычно все они дают достаточно хорошие результаты. Однако одни приложения могут иметь преимущества в некоторых областях. Но всё-таки стоит заметить, что хотя правила съёмки фотографий и одинаковы для всего ПО, существуют специфические для разных приложений рекомендации, потому что каждая программа обрабатывает данные по-своему. Эти рекомендации позволяют полностью использовать возможности ПО, и я советую потратить время на ознакомление с ними.
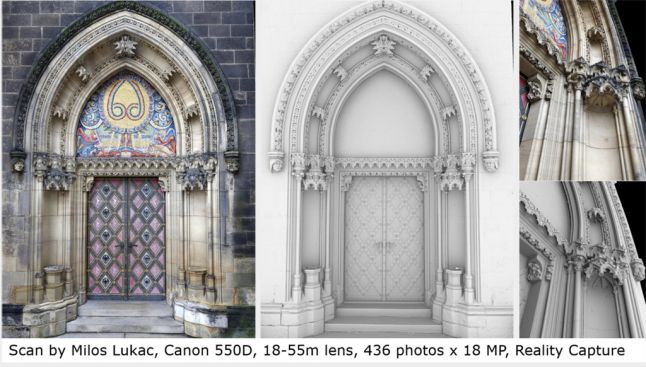
Например, из-за медленности вычислений в Agisoft вы можете стремиться записать в одно изображение как можно деталей. А Reality Capture стремится отфильтровывать эти фоновые детали, потому что они могут вносить шум. Однако Reality Capture быстрее, поэтому для неё можно просто сделать больше фотографий.
И ещё одно примечание: все описания основаны на моём личном опыте работы с этим ПО, который может отличаться от вашего. Рекомендую изучить эти варианты ПО (или другие) и самостоятельно сделать выбор.

Компьютер
Требования к компьютеру зависят от выбранного ПО, однако с помощью исследований и экспериментов я выяснил, что для большинства пакетов рекомендуемыми минимальными требованиями являются следующие:
-
Процессор: рекомендую core i7 с не менее чем 4 физическими ядрами. Xeon — это хорошо, но многие пакеты, например, Reality Capture предпочитают количеству ядер их скорость. Рекомендуется компьютер с одним процессором.
Оборудование
При работе с фотограмметрией обычно используются следующие инструменты:
- Объектив: используйте объектив с постоянным фокусным расстоянием, чем чётче, тем лучше. Если у камеры объектив с переменным фокусным расстоянием и вы хотите использовать его, то выберите верхний или нижний предел и сохраняйте его на протяжении всей съёмки.
-
ISO как можно ниже, предпочтительно не выше 400.
В качестве высокоточного устройства позиционирования используется мобильное устройство DGPS (differential GPS) или тахеометр. Это в основном относится к использованию дронов для разметки рельефа и в геодезии. Три точки — это самый минимум, возможно, вам понадобится больше. Они располагаются таким образом, чтобы точки равномерно распределялись по всей документируемой области, а несколько находилось в центре. Этого очень сложно добиться на месте съёмки, и обычно такой подход используется в проектах с большим финансированием. Определение масштаба здесь не является проблемой, но позиционирование при геодезических работах означает, что из окончательного результата получаются планы, анализы или средства контроля. Т.е. обычно они будут использоваться в рабочем пространстве GIS.
Инструкции
В этом разделе содержатся общие советы по правильной съёмке изображения и о том, на что стоит обратить внимание.
Во-первых, прочитайте великолепную статью Искусство фотограмметрии: как делать снимки, в ней очень хорошо всё объяснено.
Во-вторых, вот общие советы, полученные с форумов по Reality Capture, от 3D Scanning User Group и из личного опыта.
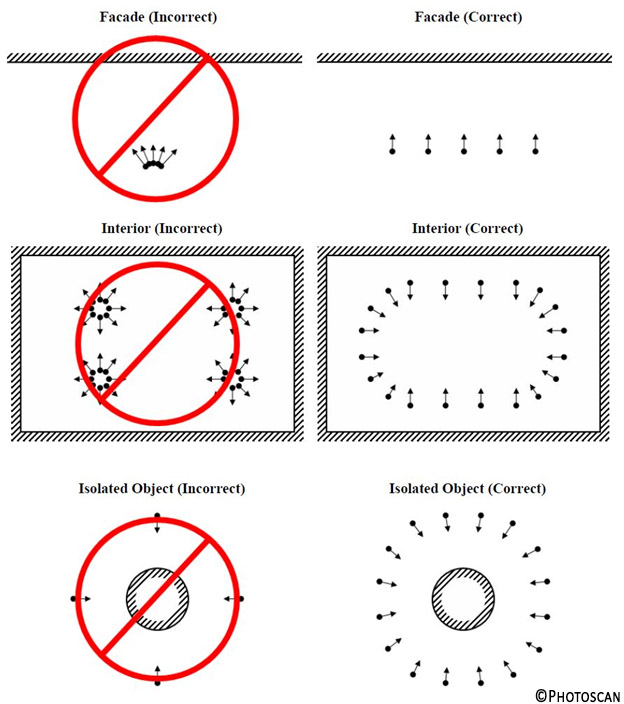
- Не меняйте точку обзора больше чем на 30 градусов.
- Начните со съёмки всего объекта, двигайтесь вокруг него, а затем фокусируйтесь на деталях. Приближайтесь не резко, а постепенно.
- Завершайте маршруты. При съёмке таких объектов как статуи, здания и подобных им нужно всегда двигаться вокург и заканчивать в том же месте, откуда начали.
- Не останавливайтесь на одном обходе, сделайте несколько с различной высоты.
- Поворачивайте камеру (горизонтальное и вертикальное перемещение обеспечивает лучшую калибровку).
- Доверяйте своим инстинктам, экспериментируйте и не бойтесь нарушать правила, если это нужно.
В-четвёртых, всегда следует с самого начала определяться с целевых разрешением. На самом деле, вам может понадобиться не такое большое разрешение, как вы думаете, что сэкономит время обработки. Разрешение зависит от параметров обработки, разрешения изображений и количества фотографий. Всё это можно и нужно иметь в виду. При сканировании камней для игры, чтобы получить модели высокого разрешения может хватить 20 снимков, в особенности если поверх отсканированной тестуры наложить процедурную текстуру с деталями. Если вы сканируете замок, вам тоже может не понадобиться большое разрешение. Просто отсканируйте замок в низком разрешении, выберите ключевые повторяющиеся элементы и отсканируйте их в высоком разрешении. Затем сгенерируйте остальное. Может возникнуть и противоположная ситуация: потребуется 500 снимков для сканирования одного камешка.
Чаще всего вам не понадобится режим Ultra High Settings в Agisoft или High settings в Reality Capture.
Практика

Теперь, когда вы кое-что знаете о фотограмметрии, вот несколько интересных примеров, которые стоит попробовать:
- Отсканируйте камень, это лёгкая мишень и хорошая задача для начала. Постарайтесь сделать как можно меньше снимков для реконструкции полной сетки, а потом начните добавлять изображения для увеличения разрешения деталей.
- Отсканируйте статую: статуя похожа на камень с интересными вогнутыми формами, которые немного повысят сложность работы.
- Отсканируйте ботинок. Не знаю, зачем все так делают. Возможно, это какой-то ритуал инициации, или что-то подобное.
- Отсканируйте узкий тоннель или лестничные проёмы. Сложность здесь в том, что у вас не будет достаточно пространства для перемещения и съёмки с разных углов. Хитрость в том, чтобы пересечь туннель, делая один снимок того, что перед вами при каждом шаге вперёд.
- Отсканируйте интерьер. У Valve есть интересный подход, который вы можете попробовать.
- Отсканируйте здание или даже замок, попробуйте сделать это с дроном и без него. Можно вскарабкаться на здание или воспользоваться длинным шестом с камерой. Подсказка.
- Отсканируйте отражающую поверхность. Изучите это видео студии ten24 по 3D-сканированию отражающих объектов с помощью фотограмметрии.
- Отсканируйте голову одной камерой. Это сложно, постарайтесь не двигаться, или попробуйте использовать поворотный стол.
- Отсканируйте насекомое. Есть хороший пример отсканированного 2cgvfx насекомого.
- Отсканируйте рельеф. Изучите ещё один подход Valve, но я крайне рекомендую исследовать подход с пролётом дрона по надиру.
Другие способы сканирования
Следует знать, что фотограмметрия — не решение всех задач. Существуют другие способы сканирования, в некоторых случаях срабатывающие лучше.
- Лидар — это геодезический способ измерения расстояния до цели подсветкой цели лазером. Лидар может быть быстрее в сборе 3D-данных, и он определённо эффективнее при сканировании растительности и полей, хотя этот способ и довольно дорогой. Лидар-сканнер тяжёлый, поэтому сложно будет прикрепить его к дрону, хотя некоторым компаниям удалось создать собственных дронов. Вот короткое видео, опубликованное Capturing Reality, в котором используется Reality Capture для комбинирования данных лазера с фотографиями для создания точной модели. Также в видео рассматриваются преимущества обоих способов.
- David Laserscanner — это гораздо более дешёвая самодельная альтернатива, в которой для измерения и сканирования объекта тоже используется лазер. Её можно применять для сканирования мелких и средних объектов (например, катеров). Стоит заметить, что владельцем этого ПО недавно стала HP.
- Сканер Artec — это ручной лазерный сканер, обеспечивающий хорошие результаты. Можно использовать для сканирования мелких предметов.
- Microsoft Kinect тоже можно использовать для сканирования объектов и людей, но у него довольно низкое разрешение.
- RTI — это вычислительный фотографический способ, снимающий форму поверхности объекта и позволяющий интерактивно изменять освещение объекта с любого направления. RTI также позволяет выполнять математическое усовершенствование формы поверхности объекта и цветовых атрибутов.
Заключение
Приступайте к работе, не сомневайтесь, постоянно практикуйтесь и пробуйте сканировать любым доступным оборудованием.
Если вы прочитали эту статью и все остальные, на которые я ссылался, и теперь не знаете, что ещё можно изучить, то прочитайте мою статью "Процесс создания готовых игровых текстур и ресурсов с помощью фотограмметрии". Также можно прочитать другие мои статьи на веб-сайте моей игры World Void на странице Devlog.
Если у вас есть вопросы, или вы считаете, что я что-то упустил, то свяжитесь со мной в Твиттере: @JosephRAzzam.
Основная задача фотограмметрии – определить координаты точек объекта по их изображениям на снимках. Для этого необходимо выполнить измерения на снимках и установить связь между системой координат в которой выполнялись измерения и системой координат используемой на местности.
Системы координат:
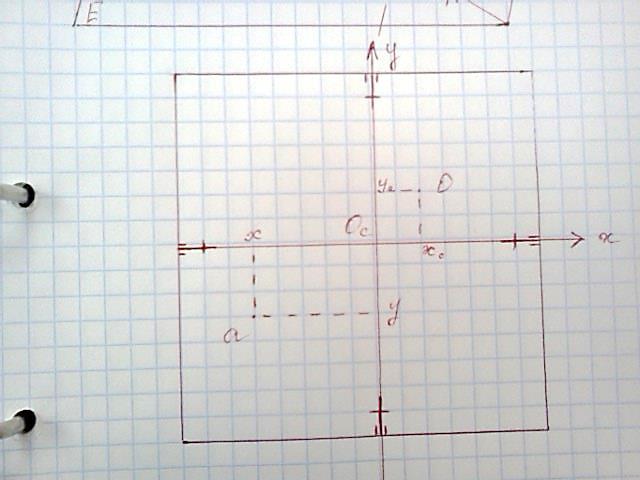

Система координат снимков задается координатными метками.
Oс – начало системы координат
Oc xy – плоскость снимка
a(x, y) - Координаты точки a в системе координат снимка
xo, уо – в системе координат снимка
f, yo, xo элементы внутреннего ориентирования снимка. Они определяют положение точки картографирования С относительно системы координат снимка и позволяют восстановить связку лучей существовавшую в момент съемки. Определяются заводом изготовителем и записываются в паспорт
Пространственная СК съемочной камеры
S, x,y,я - Пространственная система координат съемочной камеры. Начало которой находится в точке фотографирования S. Оси x, y направлены параллельно осям x, y снимка, а ось z направлена вдоль главного луча (перпендикулярно плоскости снимка)
Внешняя система координат – система в которой определяются координаты точек местности. Она мб задана условно, но чаще всего используется в геодезической СК.

Ог, x(г), y(г), z(г) – Внешняя СК (геодезическая), которую фотограмметристы называют геодезической
Фотограмметрическая система координат

SXYZ – фотограмметрическая СК
Начало в точке S
α –– угол между осью Z и проекцией главного луча на плоскость xZ
ω – поперечный угол – угол между главным лучом и плоскостью xZ
ᴂ - угол разворота снимка – угол в плоскости снимка между осью y и следом плоскости проходящей через главный луч SО и ось Y

Положение системы Sxyz относительно системы SXYZ описывается матрицей поворота А; , гдеabc – направляющие косинусы.









В системе координат снимка a (x,y)






… элементы внешнего ориентирования снимка (ЭВО - 6 штук; 3 – угловые (α, ω, ᴂ), 3 - линейные)
Таким образом, с помощью элементов внутреннего, устанавливается связь между СК
Связь координат точки местности и координат точки на снимке

A (x, y) – координаты точки на снимке
A (X, Y, Z) – координаты точки на местности

–вектор определения положения точки S во внешней СК

–вектор определения положения точки А во внешней СК

–коллинеарные => имеет место условие коллинеарности

, где N – скалярная величина


Из условия коллинеарности следует, что координаты векторов пропорциональны поэтому:



Анализ полученных формул показывает что одиночному снимку нельзя определить пространственные координаты точки если не известна скалярная величина N или высоты точек местности Z.

Математическую модель описывающую поверхность называютцифровой моделью рельефа (ЦМР)
Таким образом по одному снимку можно определить координаты (x, y) точек местности, если известны точки внешнего и внутреннего ориентирования снимка и значения высот точек местности Z
Обратная связь координат точек снимка и местности
A (X*, Y*, Z*) – в СК съемочной камеры






Связь координат между точками координаты которых измерены на снимке и координатами точки объекта во внешней системе координат
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
Читайте также: