
Принцип действия тахогенератора постоянного тока кратко
Обновлено: 05.07.2024
Тахогенератор постоянного тока – устройство электрического образца с небольшой мощностью, работающее по принципу генератора. Возбуждение происходит благодаря наличию постоянных магнитов или независимой обмотки.
Отличается от прочих разновидностей присутствием в корпусе щёточно-коллекторного узла.
Как и любая другая машина, работающая от постоянного тока, схожа со всеми остальными по конструкции. Ключевая отличительная черта – небольшие габариты.
Зачем используется, принцип работы
Генератор тахометра – устройство электромеханического типа. Его напряжение пропорциональное скорости, с которой вращается вал.
Используется для получения сведений о скорости вращения мотора, других вращающихся элементов и в качестве питания тахометра.
Большая часть современных тахогенераторов – элементы, работающие с постоянными магнитами. Как итог, в их конструкции задействуется вращающийся якорь. Один его конец крепится к валу машины с целью измерения скорости вращения ее двигателя.
Так как вращения якоря происходят в фиксированном магнитном поле, этот процесс вызывает напряжение или электродвижущую силу. Ее значение пропорционально скорости вала.
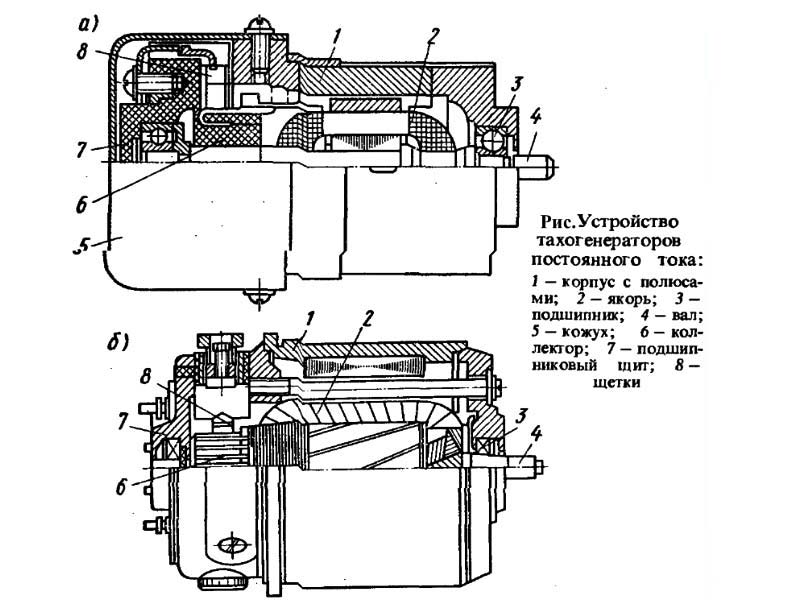
Схема - устройство тахогенераторов постоянного тока
Клеммы якоря соединены к цепи вольтметра, благодаря чему напряжение преобразуется в значение скорости.
Менее редкий тип устройств – тахогенератор со скользящей крышкой. Его конструкция помимо всего прочего состоит из алюминиевой крышки. Она вращается в статоре с обмоткой.
Сама чашка при этом соединена с валом. Переменный ток подается на одну из обмоток статора, из-за чего вокруг чаши образуются вихревые токи. За счет вращения чаши в другой обмотке статора происходит возникновения пропорционального напряжения.
Область применения
По своей конструкции любой тахогенератор постоянного тока должен обладать несколькими обязательными качествами: быть стабильным в своей работе, точным, надежным, максимально чувствительным и прочным.
Области применения тахогенераторов постоянного тока
Благодаря им устройства адаптированы под использования в разных отраслях:
- текстильные машины;
- подъемные механизмы;
- машины, создающие бумагу;
- станки;
- системы подъемно-транспортного образца;
- системы дозирования;
- прокатные станки;
- линии, где производится стекло;
- железнодорожная сфера.
Механических вариаций тахогенераторов может быть несколько, как и размеров их корпуса. Эти параметры влияют на их электрические параметры.
Пример: при скорости вращения 1000 об/мин и напряжении до 6 тыс. вольт, при скорости до 12 тыс. об/мин, механизмов с полым валом с подшипниками и без них.
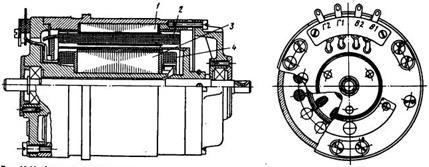
На примере рассмотрим конструкцию и функциональное назначение тахогенератора К10А6-00.

С его помощью узнают частоту, с которой вращается привод или контролируют скорость разнообразных устройств. Для измерения достаточно узнать уровень электрического тока на входных контактах описываемого устройства.
Еще К10А6-00 создает электроимпульсы управления, использующиеся для систем электрически регулировки. Их значение пропорционально соответствующему параметру выходного напряжения на тахогенераторе.
Сборка К10А6-00 схожа с конструкцией электрических двигателей, работающих на постоянном токе. Для возбуждения ЭДС задействуется подвижно ротор и постоянный магнит.
Когда катушка тахогенератора начинается двигаться в постоянном магнитном поле, результатом становится возникновение тока на ее витках. Величина этого параметра пропорциональна скорости, с которой вращается катушка. Это и есть базовый принцип, использующийся для измерения частоты вращения привода различных механизмов.
Преимущества и недостатки тахогенераторов
Чтобы понимать, с чем может быть сопряжена работа тахогенераторов, следует знать их сильные и слабые стороны.
Достоинства
- выходной сигнал представлен удобной аналоговой формой, что дает возможность узнать информацию о точном направлении вращения ротора; величина же выходного напряжения задействуется для получения сведений об измеряемой частоте вращения – чем она выше, тем больше частота;
- несмотря на небольшие габариты и незначительный вес, существенная выходная мощность;
- широкая область использования;
- применения вариантов с магнитоэлектрическим типом возбуждения, получаемого от постоянных магнитов, не требует наличия еще одного источника питания с целью возбуждения самого устройства; итог – тахогенератор подходит для решения разносторонних задач технического характера.
Недостатки
- щелочно-коллекторный узел;
- срок эксплуатации на фоне прочих типов устройства сравнительно небольшой;
- если геометрия размещения щеток нарушается, в выходном напряжении отчетливо прослеживается асимметрия;
- в период, когда ротор вращается, из-за вибрации щеток, неравенства проводимостей на обмотках коллектора, их коммутаций, могут возникнуть незапланированные пульсации, принимающие такое значение, что создают радиопомехи;
- из-за небольшого выходного сигнала при незначительных вращениях, узнать их точную скорость тахогенераторами постоянного тока невозможно;
- из-за наличия трущихся деталей могут возникнуть дополнительный механические нагрузки;
- старения магнитов влияет на их базовые свойства;
- линейная характеристика измеряемых величин обеспечивается только в небольшом диапазоне частоты вращения; этот недостаток относится к тахогенераторам большинства существующий видов.
Несмотря на обширный перечень слабых сторон, устройство, работающее от постоянного тока, часто применяются для вычисления скорости вращения, на электроприводах, в системах автоматической регулировки.
В завершение остается добавить, что тахогенераторы используются в сугубо специфических отраслях.
Строение вариантов, работающих на постоянном токе, не сильно отличается от привычного всем генератора. Могут быть погрешности относительно точности измерения, но во всем остальном все практически идентично.
Тахогенератор – маломощная электрическая машина, которая с помощью валового механизма преобразовывает его механическую скорость вращения в электросигнал исходящего напряжения.
Зачастую такие машины используют с целью замеров количества оборотов, формирования руководящих сигналов (увеличивающихся или тормозящих), разрешения вопросов интеграции и дифференциации с целью ответной реакции по скорости.
Содержание статьи :
- Виды тахогенераторов
- Тахогенераторы постоянного тока
- Синхронные тахогенераторы переменного тока
- Асинхронные тахогенераторы переменного тока
- Условия нормального функционирования тахогенераторов
- Преимущества тахогенераторов
- Недостатки тахогенераторов
Виды тахогенераторов
Тахогенераторы производятся в трех исполнениях:
- постоянного тока;
- синхронные переменного тока;
- асинхронные переменного тока.
Тахогенераторы постоянного тока
Принцип работы тахогенератора постоянного тока заключается в движении маятника простого типа с обмотками в действующем намагниченном радиусе, которое создают магниты или обмотка возбуждения статора.
Выходящий сигнал убирается щёточно-коллекторным узлом и являет собой похожую величину, от направления вращения которой зависит полярность.
Импульсы исходящие от сталых магнитов поступают в тахогенератор, который включает в себя якорь и магнитную систему. Устанавливают вал непосредственно на якорь, а к корпусу электродвигателя крепится магнитная система.
Тахогенераторы постоянного тока широко используются в концепциях автоматической регулировки, электронном приводе, с целью замеров скорости оборотов.
Виды тахогенераторов постоянного тока: ТП-75, ТП-80 , ТМГ-30П , ДПС, МСП, МП-1500.
Степень защиты у тахогенераторов – IP00.
Синхронные тахогенераторы переменного тока
Синхронные тахогенераторы обладают меньшим внутренним сопротивлением, по этой причине они отдают довольно сильную мощь. В случае, изменения частоты оборотов, у таких устройств сменяется и исходящее напряжение, и периодичность.
Из-за того, что исходящее напряжение зачастую выпрямляется, используют схемы, которые контролируют частоту сигналов, исходящих тахогенераторов.
Из-за механической стойкости синхронные тахогенераторы используют в наземном и подземном транспорте, на машинах в шахтах, и других агрегатах, которые подвергаются постоянной встряске.
Виды синхронных тахогенераторов: ТГС-12Э, ТС45, ТС50, ТС71.
Асинхронные тахогенераторы переменного тока
Асинхронные тахогенераторы обладают малой массой подвижной части механизма и простой конструкцией.
Основное преимущество, которое определяет их выбор, и заключается в том, что вне зависимости от скорости привода напряжение на выходе тахогенератора обладает сталой частотой.
Сталая довольно высокая частота отфильтровывает волнообразные импульсы выровненного напряжения без ощутимого влияния колебаний внутри системы, которое имеет эффект уменьшения или предотвращения ее колебаний.
Виды асинхронных тахогенераторов: АТ-231, ДПН-1А, АДТ-306, АДТ-32ВМ, АДТ-50Д, АДТ-50ВМ, АДТ-512, МТ.

Несомненно, развитие человечества в последние столетия неразрывно связано с освоением источников энергии и их эффективным применением. Более того, можно сказать, что уровень развития той или иной страны напрямую зависит от объема производимой энергии.
Первым источником энергии, совершившим промышленную революцию, стал пар, но вскоре его гегемония сменилась на власть электрических машин. Сегодня мы с вами поговорим про тахогенераторы постоянного тока — устройства, внесшие огромную лепту в прогресс человечества.
Немного исторической информации
19 век стал для человечества поворотной точкой в истории. Он знаменателен величайшими научными открытиями, в том числе и в электротехнике.

- В то далекое время известный английский физик-экспериментатор Майкл Фарадей открывает закон электромагнитной индукции. Это событие и можно считать отправной точной в электрификации планеты. Дальнейшее развитие и практическое применение этих знаний было лишь вопросом времени.

- В 1834 году русский физик Б.С. Якоби представил миру конструкцию первой электрической машины, ставшую, как потом оказалось, прототипом всех современных электродвигателей.

- Следующим существенным шагом стало появление трансформаторов и их практическое использование. В 1876 году это открытие сделал русский ученый П.Н. Яблочков. Он же изобрел электрические свечи и доказал практическую пользу и безопасность применения переменного тока.
Интересно знать! До изысканий Яблочкова всем научным мировым сообществом считалось, что использовать переменный ток невозможно и опасно.

- В 1889 году русский инженер М.О. Доливо-Добровольский изобретает трехфазный асинхронный двигатель, благодаря чему электрические машины в промышленности стали применяться наиболее широко. Конструкция данного аппарата была крайне простой и одновременно надежной.
- В итоге к началу 20-го века уже были созданы все основные виды электрических машин, которые активно применяются и по сей день. Их используют в разных отраслях промышленности и приборах.
Микромашины в электротехнике
Помимо мощных агрегатов также потребовались и машины малой мощности, называемые еще микромашинами. Они активно применяются в устройствах вычислительной техники и автоматики в качестве функциональных элементов.



- Эти типы устройств принято делить на три группы: электромашинные усилители, исполнительные двигатели и информационные машины.
- Первые служат для усиления мощности электрических сигналов.
- Исполнительные двигатели занимаются преобразованием электрического тока в механическую силу. Эти аппараты могут быть асинхронными, шаговыми и постоянного тока.

- Информационные машины состоят из тахогенераторов, сельсин, магнесин и вращающихся трансформаторов. Назначение этих устройств – преобразование величин неэлектрической природы в электрические сигналы. В частности, тахогенератор постоянного тока измеряет скорость вращения некоего объекта и применяется он в различных устройствах электропривода, станках, транспорте и прочем.
Принцип работы тахогенераторов и их строение

Тахогенератор – устройство оборудованное валом, которое, при его вращении, выдает на выходе электрическое напряжение, величина которого прямо пропорциональна скорости, с которой вал вращается. Эта особенность означает, что двигатель постоянного тока с тахогенератором, по сути, оснащен датчиком, с постоянными магнитами или независимым внешним возбуждением.

- Конструкция тахогенератора практически неотличима от конструкции других машин постоянного тока. Используют их для измерения частоты вращения по значению выходного напряжения и для получения электрического сигнала с частотой вращения вала в схемах авто регулирования.

- Съемка напряжения происходит через скользящий контакт, который традиционно состоит из медного коллектора и графитовых щеток.
- У такой конструкции есть особенность, что, из-за того, что на меди образуется оксидная пленка, может с некоторой периодичностью меняться сопротивление контакта. По этой причине происходят колебания напряжения выдаваемого тахогенератором, которые воспринимаются в виде шума.
Интересно знать! На низких оборотах шумы тахогенератора сравниваются с полезным сигналом.
- Несмотря на этот недостаток, данная конструкция остается самой популярной, так как графит обладает отличными скользящими свойствами, а значит, устройство служит значительно дольше, чем аналоги.
- Если требуется тахогенератор, лишенный указанного недостатка, то на коллектор наносят контактную дорожку из серебра. Этот металл не окисляется, а значит, показания сопротивления всегда остаются на одном уровне.
Тахогенераторы Long Life

- Технические характеристики тахогенераторов переменного тока данного типа впечатляют. Диапазон рабочих температур от -50 до +100 градусов по Цельсию. Возможность измерения скорости вращения с точностью 1:100000 в режиме реального времени.
- Цилиндр у этих устройств может быть полым или цельным.
- Крепление вала фланцевое или лаповое.
Схемы постоянной автоматики
Итак, мы уже говорили, что тахогенераторы используются в автоматических схемах, теперь давайте подробнее разберем, как они там задействованы.

- Выше показана принципиальная схема подключения тахогенератора.
- Обмотка ОВ подключается к источнику постоянного тока. При этом тахогенератор, приходя в состояние возбуждения, и если его якорь приводится в движение с некой частотой, на выходе он начнет выдавать постоянное напряжение.
- При этом чем больше сопротивление прибора Rh, тем круче характеристика Сu на выходе. Значение наибольшей крутизны будет соответствовать холостому режиму работы тахогенератора – случается это когда обмотка у якоря размыкается.
- Соответственно, при росте нагрузки наблюдается обратное явление.
- Тахогенератор выдает на выходе характеристику тока в виде постоянной линии, но соответствует это действительности только на низких оборотах вращения. Если их увеличить, характеристика станет криволинейной. Если при этом уменьшается сопротивление нагрузки RH эффект кривизны также будет расти.
- Объясняется это тем, что якорь оказывает размагничивающее действие.
Совет! Чтобы генератор не выдавал криволинейную выходную характеристику, не нужно запускать его на максимально возможных оборотах, а в качестве нагрузки использовать только приборы, внутреннее сопротивление которых небольшое.

- Также стоит учитывать момент, что в реальных условиях наблюдается падение напряжения в щетках, из-за чего выходная характеристика идет не из начала координат, а с некоторым смещением. Данное явление – причина появления у тахогенераторов зоны нечувствительности, в которой не создается напряжение.
- Чтобы уменьшить зону нечувствительности применяют щетки с малым сопротивлением, обычно медно-графитовые или серебряно-графитовые. В моделях высокой точности используют щетки с серебряными или золотыми напайками. Однако все равно эти приборы имеют некоторую погрешность, в пределах 0,2-0,5%.
Асинхронный тахогенератор
Конструкция асинхронного тахогенератора точно такая же, как у асинхронного электродвигателя с немагнитным ротором (полым).
- Обмотка возбуждения статора подключается к источнику переменного тока, а выходное напряжение снимается с генераторной обмотки (ГО).
- Его принцип действия состоит в следующем – обмотка возбуждения запитывается переменным током некоторой частоты, в результате чего возникает пульсирующий магнитный поток, постоянно меняющий направление.

- Из-за воздействия данного магнитного поля во вращающемся роторе индуцируется два типа ЭДС – вращения и трансформаторная.
- На контурах, что перпендикулярны оси обмотки возбуждения, также начинают протекать токи, вызываемые ЭДС вращения. Эти токи также, пульсируя, индуцируют новую ЭДС – выходную.
- Если не углубляться в физические расчеты, то можно сказать, что асинхронный тахогенератор является несимметричным двухфазным агрегатом, который может быть исследован симметричными составляющими.
Погрешности асинхронных тахогенераторов
Выходное напряжение, выдаваемое данным типом тахогенераторов – комплексная величина, что говорит о фазовой и амплитудной погрешностях.

- Фазовая погрешность – это отклонение в градусах фазы напряжения на выходе от базовой фазы напряжения, то есть напряжения возбуждения. Возникает данный эффект в основном за счет индуктивного сопротивления статора и в большей части ротора. Данный тип погрешности может быть уменьшен, за счет правильной подборки характеристики применяемой нагрузки.
- Амплитудная погрешность – это отклонение показаний напряжения от частоты вращения от идеального значения, в котором они должны быть равны. Выражается этот показатель в процентах.

Также как и в случае фазовой погрешности, уменьшение данного эффекта возможно за счет правильной настройки и калибровки асинхронного тахогенератора.
- Физические причины амплитудной погрешности следующие. Во-первых, происходит падение напряжения в обмотке генератора. Во-вторых, меняется ток возбуждения, а следом за ним и магнитный поток, так как трансформаторная ЭДС ротора вызывает размагничивание. Третья причина – это то, что магнитный поток генераторной обмотки противостоит магнитному потоку вращения, из-за чего тот несколько уменьшается.
- Также стоит помнить, что ротор имеет некоторое индуктивное сопротивление, что также влияет на магнитный поток вращения, уменьшая его.
- И последнее – магнитный поток вращения индуцирует ЭДС вращения, а значит, появляются новый ток и магнитное поле, которое также противостоит потоку возбуждения. Данная электродвижущая сила является пропорциональной угловой скорости вращения, а значит, при увеличении частоты вращения ротора она тоже будет расти и противодействие усилится. Выражается это в падении напряжения в обмотке возбуждения и уменьшении магнитного потока вращения.
- Интересно, что одновременно понизить и фазовую и амплитудную погрешность невозможно. Поэтому схему подключения отлаживают так, чтобы снизить наиболее влияющие погрешности в конкретном случае.
Интересно знать! На практике доказано, что при низких оборотах вращения тахогенератора асинхронного типа оба типа погрешностей достаточно малы, из-за чего диапазоны вращения устройств ограничивают конкретными значениями.
Данные типы погрешностей хоть и являются основными, но они далеко не единственные:
- Нулевой сигнал – это напряжение, имеющееся на обмотке генератора в момент, когда ротор неподвижен. Данный параметр не остается постоянным, так как меняется при повороте ротора. Состоит он из двух составляющих: постоянно и переменной.
- Постоянная переменная возникает из-за неточного сдвига обмоток; присутствием короткозамкнутых контуров в обмотках и сердечнике; неодинаковой магнитной проходимости; неравномерного воздушного зазора; потоков рассеяния и прочего.
- Переменная составляющая обусловлена неравномерной толщиной стенок ротора, если он полый, из-за чего возникает разность активного сопротивления у контуров, а значит, и разность тока и магнитного потока.
- Чтобы ослабить постоянную составляющую нулевого сигнала, обмотки устанавливают на разных статорах: одна ставится на внутреннем, другая на наружном. При этом во время сборки асинхронного тахогенератора внутренний статор проворачивается, пока нулевой сигнал не достигнет минимального значения.
- Побороть переменную составляющую можно только калибровкой ротора, его симметричностью.

- Следующая погрешность называется асимметрией выходного напряжения. Выражается она неравенством выдаваемых тахогенератором напряжений при вращении в разные стороны. Эффект особенно заметен при малых оборотах.
- Причина явления связана с остаточной ЭДС от нулевого сигнала, ведь его фаза остается постоянной, тогда как фаза вращения смещается на 180 градусов. Борются с проблемой за счет уменьшения нулевого сигнала.
- Последний вид погрешности является температурным. Влияние температуры окружающей среды, а также нагревания во время работы ротора, сказывается так, что изменяется активное сопротивление у обмоток на статоре и роторе. Все это сказывается, в свою очередь, на идеальном выходном напряжении, и увеличивает амплитудную и фазовую погрешности.
- Чтобы стабилизировать изменение сопротивления обмотки возбуждения, последовательно подключают терморезисторы. Ротор же изготавливается из материалов с максимально низким температурным коэффициентом.
В завершение
Итак, мы разобрали принципы и назначение тахогенератора. Устройства эти применяются для сугубо специфических целей, но, как стало ясно, их строение практически не отличается от классического генератора постоянного тока. Есть некоторые нюансы относительно точности прибора, но в остальном все сходится.
Просмотрите видео в этой статье, чтобы увидеть практическое применение этих агрегатов.
Тахогенераторами называются небольшие электрические машины, предназначенные для преобразования механического перемещения—вращения вала — в электрический сигнал — выходное напряжение.
Основное требование, предъявляемое к тахогенераторам,— линейность выходной характеристики, т. е. строгая пропорциональность между выходным напряжением Uтг и частотой вращения n:
где k – постоянная величина;
α – угол поворота.
Тахогенераторы используются в технике для различных целей: измерения частоты вращения; осуществления обратных связей по скорости в системах автоматического регулирования; выполнения электрического дифференцирования и интегрирования в схемах счетно-решающих устройств.
Тахогенераторами могут быть машины как переменного (синхронные и асинхронные), так и постоянного тока.
Тахогенераторы постоянного тока — это небольшие генераторы постоянного тока с независимым возбуждением (рис. 1.14, а) или с возбуждением от постоянных магнитов.
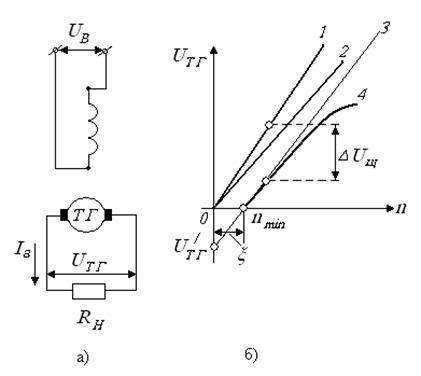
Рис. 1.14. Тахогенератор достоянного тока
Конструктивно они не отличаются от обычных машин постоянного тока малой мощности. Выходное напряжение тахогенератора Uтг может быть выражено через ЭДС якоря Еа, падение напряжения в обмотке якоря Iаrа и падение напряжения на щеточном контакте ΔUщ:
Выразим ЭДС якоря через магнитный поток возбуждения и частоту вращения n:
а ток якоря Ia через напряжение на выходе тахогенератора и сопротивление нагрузки Rн:
Подставив Еа и Ia в выражение (1.40), получим
откуда найдем окончательное выражение выходного напряжения
Если пренебречь падением напряжения на щеточном контакте (принять ΔUщ.=0), то выражение выходного напряжения примет вид
При постоянных Ф, rа и Rн выходное напряжение строго пропорционально частоте вращения:
Зависимость напряжения на выходе тахогенератора Uтг от частоты вращения п называется выходной характеристикой (рис. 1.14, б).
Величина k, равная отношению выходного напряжения Uтг к частоте вращения п:
называется крутизной выходной характеристики и является одной из основных величин, определяющих свойства тахогенераторов. У современных тахогенераторов крутизна составляет 3÷100 .
Чем больше се, Ф и Rн и меньше rа, тем больше крутизна выходной характеристики. Наибольшая крутизна имеет место при холостом ходе, когда Rн = ∞ (прямая 1 рис. 1.14, б):
Чем меньше сопротивление нагрузки Rн, тем меньше крутизна характеристики (прямая 2, рис. 1.14, б).
В реальном тахогенераторе ΔUщ≠0, поэтому выходная характеристика Uтг = f(n) пересекает ось ординат (при п=0), как это следует из равенства (1.41), не в начале координат, а в точке
(прямая 3, рис. 1.14, б).
За счет падения напряжения в щеточном контакте у тахогенератора появляется зона нечувствительности ε — зона частот вращения от п=0 до пmin, при которых выходное напряжение тахогенератора равно нулю. Границу зоны нечувствительности пmin можно найти из выражения (1.41), подставив в него Uтг=0:
Если магнитная система тахогенератора насыщена и сопротивление нагрузки Rн невелико, то магнитный поток Ф тахогенератора при его работе не остается постоянным — он уменьшается на величину ΔФ с увеличением частоты вращения за счет размагничивающего действия реакции якоря. При этом крутизна кривой выходной характеристики также уменьшается:
и выходная характеристика тахогенератора Uтг = f(n) отклоняется от прямолинейной (кривая 4, рис. 1.14, б). У тахогенератора появляется погрешность, величина которой обычно составляет 0,5÷3%. Для устранения погрешности, вносимой реакцией якоря, тахогенераторы выполняют с ненасыщенной магнитной системой.
За счет электрических потерь, а также внешних воздействий температура обмоток тахогенератора не остается постоянной. Нагрев обмоток приводит к увеличению их сопротивления. Сопротивление обмотки якоря тахогенератора rа обычно невелико, и его изменение мало влияет на выходную характеристику. Изменение сопротивления обмотки возбуждения rв приводит к изменению тока возбуждения Iв, а следовательно, и магнитного потока Ф. Последнее ведет к изменению крутизны выходной характеристики и появлению температурной погрешности тахогенератора.

Стабильность магнитного потока возбуждения при возможных колебаниях тока возбуждения достигается сильным насыщением магнитной системы тахогенератора. В этом случае даже значительное изменение тока возбуждения мало влияет на величину магнитного потока ( ) (рис. 1.15).
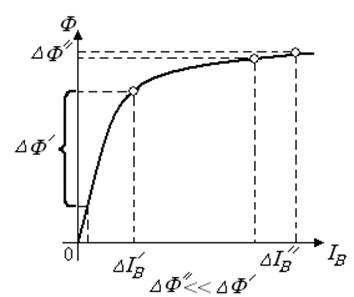
Рис.1.15 Влияние степени магнитного насыщения на температурную погрешность тахогенератора
Однако насыщение тахогенератора увеличивает размагничивающее действие реакции якоря, поэтому оно недопустимо при сравнительно больших токах якоря.
Тахогенераторы, возбуждаемые постоянными магнитами, не имеют обмотки возбуждения, поэтому их температурная погрешность, возникающая только за счет изменения сопротивления обмотки якоря, очень незначительна.
Наличие в выходной цепи тахогенераторов постоянного тока щеточных контактов обусловливает появление целого ряда недостатков:
— нестабильности выходной характеристики вследствие изменения переходного сопротивления скользящих контактов;
— зоны нечувствительности при малых частотах вращения;
— несимметрии выходной характеристики — неравенства напряжения при вращении якоря в различных направлениях;
— пульсации выходного напряжения; излучения радиопомех; снижения надежности и пр.
Несимметрия выходного напряжения возникает за счет неточной установки щеток на геометрической нейтрали или смещения их в процессе эксплуатации. Ошибка асимметрии обычно выражается в процентах:
где Uпр и Uлев — напряжения соответственно при правом и левом вращении якоря с одной и той же частотой.
В современных тахогенераторах ошибка несимметрии составляет 1÷3%.
Чтобы устранить недостатки, вносимые щеточными контактами, их переходное сопротивление стараются свести к минимуму. Для этого применяют медно-графитные и серебряно-графитные щетки, а для прецизионных тахогнераторов счетно-решающих устройств даже щетки с серебряными и золотыми напайками.
Для снижения радиопомех тахогенераторы снабжают либо специальными экранами, либо электрическими фильтрами.
Серьезный недостаток тахогенераторов постоянного тока — наличие пульсаций выходного напряжения. Причины возникновения пульсаций весьма разнообразны, однако их можно разделить на три группы: якорные, зубцовые и коллекторные.
Якорные пульсации возникают из-за пульсации магнитного потока вследствие неравномерности воздушного зазора и неравенства магнитной проводимости якоря в различных радиальных направлениях. Чтобы устранить их, увеличивают воздушный зазор; обрабатывают по высокому классу точности цилиндрические поверхности якоря, вала, подшипниковых щитов; применяют веерную сборку пакета якоря — каждый последующий лист стали смещают на одно зубцовое деление по отношению к предыдущему, выравнивая таким образом магнитную проводимость якоря в различных радиальных направлениях.
Зубцовые пульсации возникают вследствие пульсаций магнитной проводимости воздушного зазора из-за зубчатого строения якоря. Для их устранения пазы якоря скашивают на одна зубцовое деление; правильно выбирают ширину полюсных наконечников, число пазов якоря; применяют магнитные клинья и т. п.
Коллекторные пульсации возникают из-за вибрации щеток; вследствие неровностей коллектора, его эллиптичности; периодического изменения числа секций обмотки якоря в параллельных ветвях; добавочных коммутационных токов, нагружающих контакт, и т. п. Чтобы устранить эти недостатки, тщательно подбирают число коллекторных пластин, повышают качество щеток и щеткодержателей, улучшают качество обработки коллектора и т.п.
Однако несмотря на все перечисленные меры, пульсации выходного напряжения в тахогенераторах постоянного тока обычной конструкции полностью устранить не удается. Желание свести их до минимума привело к созданию тахогенераторов постоянного тока с полым якорем, выполненных аналогично малоинерционным исполнительным двигателям постоянного тока. У этих тахогенераторов совершенно отсутствуют якорные и зубцовые пульсации, так как якорь не имеет зубцов; реакция якоря незначительна, а коммутация очень хорошая.
Тахогенераторами называются небольшие электрические машины, предназначенные для преобразования механического перемещения—вращения вала — в электрический сигнал — выходное напряжение.
Основное требование, предъявляемое к тахогенераторам,— линейность выходной характеристики, т. е. строгая пропорциональность между выходным напряжением Uтг и частотой вращения n:
где k – постоянная величина;
α – угол поворота.
Тахогенераторы используются в технике для различных целей: измерения частоты вращения; осуществления обратных связей по скорости в системах автоматического регулирования; выполнения электрического дифференцирования и интегрирования в схемах счетно-решающих устройств.
Тахогенераторами могут быть машины как переменного (синхронные и асинхронные), так и постоянного тока.
Тахогенераторы постоянного тока — это небольшие генераторы постоянного тока с независимым возбуждением (рис. 1.14, а) или с возбуждением от постоянных магнитов.
Рис. 1.14. Тахогенератор достоянного тока
Конструктивно они не отличаются от обычных машин постоянного тока малой мощности. Выходное напряжение тахогенератора Uтг может быть выражено через ЭДС якоря Еа, падение напряжения в обмотке якоря Iаrа и падение напряжения на щеточном контакте ΔUщ:
Выразим ЭДС якоря через магнитный поток возбуждения и частоту вращения n:
а ток якоря Ia через напряжение на выходе тахогенератора и сопротивление нагрузки Rн:
Подставив Еа и Ia в выражение (1.40), получим
откуда найдем окончательное выражение выходного напряжения
Если пренебречь падением напряжения на щеточном контакте (принять ΔUщ.=0), то выражение выходного напряжения примет вид
При постоянных Ф, rа и Rн выходное напряжение строго пропорционально частоте вращения:
Зависимость напряжения на выходе тахогенератора Uтг от частоты вращения п называется выходной характеристикой (рис. 1.14, б).
Величина k, равная отношению выходного напряжения Uтг к частоте вращения п:
называется крутизной выходной характеристики и является одной из основных величин, определяющих свойства тахогенераторов. У современных тахогенераторов крутизна составляет 3÷100 .
Чем больше се, Ф и Rн и меньше rа, тем больше крутизна выходной характеристики. Наибольшая крутизна имеет место при холостом ходе, когда Rн = ∞ (прямая 1 рис. 1.14, б):
Чем меньше сопротивление нагрузки Rн, тем меньше крутизна характеристики (прямая 2, рис. 1.14, б).
В реальном тахогенераторе ΔUщ≠0, поэтому выходная характеристика Uтг = f(n) пересекает ось ординат (при п=0), как это следует из равенства (1.41), не в начале координат, а в точке
(прямая 3, рис. 1.14, б).
За счет падения напряжения в щеточном контакте у тахогенератора появляется зона нечувствительности ε — зона частот вращения от п=0 до пmin, при которых выходное напряжение тахогенератора равно нулю. Границу зоны нечувствительности пmin можно найти из выражения (1.41), подставив в него Uтг=0:
Если магнитная система тахогенератора насыщена и сопротивление нагрузки Rн невелико, то магнитный поток Ф тахогенератора при его работе не остается постоянным — он уменьшается на величину ΔФ с увеличением частоты вращения за счет размагничивающего действия реакции якоря. При этом крутизна кривой выходной характеристики также уменьшается:
и выходная характеристика тахогенератора Uтг = f(n) отклоняется от прямолинейной (кривая 4, рис. 1.14, б). У тахогенератора появляется погрешность, величина которой обычно составляет 0,5÷3%. Для устранения погрешности, вносимой реакцией якоря, тахогенераторы выполняют с ненасыщенной магнитной системой.
За счет электрических потерь, а также внешних воздействий температура обмоток тахогенератора не остается постоянной. Нагрев обмоток приводит к увеличению их сопротивления. Сопротивление обмотки якоря тахогенератора rа обычно невелико, и его изменение мало влияет на выходную характеристику. Изменение сопротивления обмотки возбуждения rв приводит к изменению тока возбуждения Iв, а следовательно, и магнитного потока Ф. Последнее ведет к изменению крутизны выходной характеристики и появлению температурной погрешности тахогенератора.
Стабильность магнитного потока возбуждения при возможных колебаниях тока возбуждения достигается сильным насыщением магнитной системы тахогенератора. В этом случае даже значительное изменение тока возбуждения мало влияет на величину магнитного потока ( ) (рис. 1.15).
Рис.1.15 Влияние степени магнитного насыщения на температурную погрешность тахогенератора
Однако насыщение тахогенератора увеличивает размагничивающее действие реакции якоря, поэтому оно недопустимо при сравнительно больших токах якоря.
Тахогенераторы, возбуждаемые постоянными магнитами, не имеют обмотки возбуждения, поэтому их температурная погрешность, возникающая только за счет изменения сопротивления обмотки якоря, очень незначительна.
Наличие в выходной цепи тахогенераторов постоянного тока щеточных контактов обусловливает появление целого ряда недостатков:
— нестабильности выходной характеристики вследствие изменения переходного сопротивления скользящих контактов;
— зоны нечувствительности при малых частотах вращения;
— несимметрии выходной характеристики — неравенства напряжения при вращении якоря в различных направлениях;
— пульсации выходного напряжения; излучения радиопомех; снижения надежности и пр.
Несимметрия выходного напряжения возникает за счет неточной установки щеток на геометрической нейтрали или смещения их в процессе эксплуатации. Ошибка асимметрии обычно выражается в процентах:
где Uпр и Uлев — напряжения соответственно при правом и левом вращении якоря с одной и той же частотой.
В современных тахогенераторах ошибка несимметрии составляет 1÷3%.
Чтобы устранить недостатки, вносимые щеточными контактами, их переходное сопротивление стараются свести к минимуму. Для этого применяют медно-графитные и серебряно-графитные щетки, а для прецизионных тахогнераторов счетно-решающих устройств даже щетки с серебряными и золотыми напайками.
Для снижения радиопомех тахогенераторы снабжают либо специальными экранами, либо электрическими фильтрами.
Серьезный недостаток тахогенераторов постоянного тока — наличие пульсаций выходного напряжения. Причины возникновения пульсаций весьма разнообразны, однако их можно разделить на три группы: якорные, зубцовые и коллекторные.
Якорные пульсации возникают из-за пульсации магнитного потока вследствие неравномерности воздушного зазора и неравенства магнитной проводимости якоря в различных радиальных направлениях. Чтобы устранить их, увеличивают воздушный зазор; обрабатывают по высокому классу точности цилиндрические поверхности якоря, вала, подшипниковых щитов; применяют веерную сборку пакета якоря — каждый последующий лист стали смещают на одно зубцовое деление по отношению к предыдущему, выравнивая таким образом магнитную проводимость якоря в различных радиальных направлениях.
Зубцовые пульсации возникают вследствие пульсаций магнитной проводимости воздушного зазора из-за зубчатого строения якоря. Для их устранения пазы якоря скашивают на одна зубцовое деление; правильно выбирают ширину полюсных наконечников, число пазов якоря; применяют магнитные клинья и т. п.
Коллекторные пульсации возникают из-за вибрации щеток; вследствие неровностей коллектора, его эллиптичности; периодического изменения числа секций обмотки якоря в параллельных ветвях; добавочных коммутационных токов, нагружающих контакт, и т. п. Чтобы устранить эти недостатки, тщательно подбирают число коллекторных пластин, повышают качество щеток и щеткодержателей, улучшают качество обработки коллектора и т.п.
Однако несмотря на все перечисленные меры, пульсации выходного напряжения в тахогенераторах постоянного тока обычной конструкции полностью устранить не удается. Желание свести их до минимума привело к созданию тахогенераторов постоянного тока с полым якорем, выполненных аналогично малоинерционным исполнительным двигателям постоянного тока. У этих тахогенераторов совершенно отсутствуют якорные и зубцовые пульсации, так как якорь не имеет зубцов; реакция якоря незначительна, а коммутация очень хорошая.
Читайте также:
- Протокол заседания жюри школьного этапа всероссийской олимпиады школьников образец
- Гладильный каток для прачечной детского сада инструкция по применению
- Лесные ресурсы пензенской области кратко
- Изложение на тему голуби по русскому языку
- Приведите примеры техногенных процессов формирующих рельеф земли кратко