
Назначение и типы систем распознавания образов кратко
Обновлено: 30.06.2024
Аннотация: Эта лекция рассматривает вопрос о системах распознавания образов, дает понятие образа. Также освещены различные подходы к распознаванию образов, гипотеза компактности. Кроме того, затронуты темы обучения и самообучения систем ИИ.
Понятие образа
Образ, класс — классификационная группировка в системе классификации, объединяющая (выделяющая) определенную группу объектов по некоторому признаку.
Образное восприятие мира — одно из загадочных свойств живого мозга, позволяющее разобраться в бесконечном потоке воспринимаемой информации и сохранять ориентацию в океане разрозненных данных о внешнем мире. Воспринимая внешний мир, мы всегда производим классификацию воспринимаемых ощущений, т. е. разбиваем их на группы похожих, но не тождественных явлений. Например, несмотря на существенное различие, к одной группе относятся все буквы А, написанные различными почерками, или все звуки, которые соответствуют одной и той же ноте, взятой в любой октаве и на любом инструменте, а оператор, управляющий техническим объектом, на целое множество состояний объекта реагирует одной и той же реакцией. Характерно, что для составления понятия о группе восприятий определенного класса достаточно ознакомиться с незначительным количеством ее представителей. Ребенку можно показать всего один раз какую-либо букву, чтобы он смог найти эту букву в тексте, написанном различными шрифтами, или узнать ее, даже если она написана в умышленно искаженном виде. Это свойство мозга позволяет сформулировать такое понятие, как образ.
Образы обладают характерным свойством, проявляющимся в том, что ознакомление с конечным числом явлений из одного и того же множества дает возможность узнавать сколь угодно большое число его представителей. Примерами образов могут быть: река, море, жидкость, музыка Чайковского, стихи Маяковского и т. д. В качестве образа можно рассматривать и некоторую совокупность состояний объекта управления, причем вся эта совокупность состояний характеризуется тем, что для достижения заданной цели требуется одинаковое воздействие на объект . Образы обладают характерными объективными свойствами в том смысле, что разные люди, обучающиеся на различном материале наблюдений, большей частью одинаково и независимо друг от друга классифицируют одни и те же объекты. Именно эта объективность образов позволяет людям всего мира понимать друг друга.
Способность восприятия внешнего мира в форме образов позволяет с определенной достоверностью узнавать бесконечное число объектов на основании ознакомления с конечным их числом, а объективный характер основного свойства образов позволяет моделировать процесс их распознавания. Будучи отражением объективной реальности, понятие образа столь же объективно, как и сама реальность, а поэтому может быть само по себе объектом специального исследования.
В литературе, посвященной проблеме обучения распознавания образов (ОРО), часто вместо понятия образа вводится понятие класса.
Проблема обучения распознаванию образов (ОРО)
Одним из самых интересных свойств человеческого мозга является способность отвечать на бесконечное множество состояний внешней среды конечным числом реакций. Может быть, именно это свойство позволило человеку достигнуть высшей формы существования живой материи, выражающейся в способности к мышлению, т. е. активному отражению объективного мира в виде образов, понятий, суждений и т. д. Поэтому проблема ОРО возникла при изучении физиологических свойств мозга.
Рассмотрим пример задач из области ОРО.

Здесь представлены 12 изображений, и следует отобрать признаки, при помощи которых можно отличить левую триаду картинок от правой. Решение данных задач требует моделирования логического мышления в полном объеме.
В целом проблема распознавания образов состоит из двух частей: обучения и распознавания. Обучение осуществляется путем показа отдельных объектов с указанием их принадлежности тому или другому образу. В результате обучения распознающая система должна приобрести способность реагировать одинаковыми реакциями на все объекты одного образа и различными — на все объекты различных образов. Очень важно, что процесс обучения должен завершиться только путем показов конечного числа объектов без каких-либо других подсказок. В качестве объектов обучения могут быть либо картинки, либо другие визуальные изображения (буквы), либо различные явления внешнего мира, например, звуки, состояния организма при медицинском диагнозе, состояние технического объекта в системах управления и др. Важно, что в процессе обучения указываются только сами объекты и их принадлежность образу. За обучением следует процесс распознавания новых объектов, который характеризует действия уже обученной системы. Автоматизация этих процедур и составляет проблему обучения распознаванию образов. В том случае, когда человек сам разгадывает или придумывает, а затем навязывает машине правило классификации, проблема распознавания решается частично, так как основную и главную часть проблемы (обучение) человек берет на себя.
Проблема обучения распознаванию образов интересна как с прикладной, так и с принципиальной точки зрения. С прикладной точки зрения решение этой проблемы важно прежде всего потому, что оно открывает возможность автоматизировать многие процессы, которые до сих пор связывали лишь с деятельностью живого мозга. Принципиальное значение проблемы тесно связано с вопросом, который все чаще возникает в связи с развитием идей кибернетики: что может и что принципиально не может делать машина? В какой мере возможности машины могут быть приближены к возможностям живого мозга? В частности, может ли машина развить в себе способность перенять у человека умение производить определенные действия в зависимости от ситуаций, возникающих в окружающей среде? Пока стало ясно только то, что если человек может сначала сам осознать свое умение, а потом его описать, т. е. указать, почему он производит действия в ответ на каждое состояние внешней среды или как (по какому правилу) он объединяет отдельные объекты в образы, то такое умение без принципиальных трудностей может быть передано машине. Если же человек обладает умением, но не может объяснить его, то остается только один путь передачи умения машине — обучение примерами.
Круг задач, которые могут решаться с помощью распознающих систем, чрезвычайно широк. Сюда относятся не только задачи распознавания зрительных и слуховых образов, но и задачи распознавания сложных процессов и явлений, возникающих, например, при выборе целесообразных действий руководителем предприятия или выборе оптимального управления технологическими, экономическими, транспортными или военными операциями. В каждой из таких задач анализируются некоторые явления, процессы, состояния внешнего мира, всюду далее называемые объектами наблюдения. Прежде чем начать анализ какого-либо объекта, нужно получить о нем определенную, каким-либо способом упорядоченную информацию. Такая информация представляет собой характеристику объектов, их отображение на множестве воспринимающих органов распознающей системы.
Но каждый объект наблюдения может воздействовать на нас по-разному, в зависимости от условий восприятия. Например, какая-либо буква, даже одинаково написанная, может в принципе как угодно смещаться относительно воспринимающих органов. Кроме того, объекты одного и того же образа могут достаточно сильно отличаться друг от друга и, естественно, по-разному воздействовать на воспринимающие органы.
Каждое отображение какого-либо объекта на воспринимающие органы распознающей системы, независимо от его положения относительно этих органов, принято называть изображением объекта, а множества таких изображений, объединенные какими-либо общими свойствами, представляют собой образы.
При решении задач управления методами распознавания образов вместо термина "изображение" применяют термин "состояние". Состояние — это определенной формы отображение измеряемых текущих (или мгновенных) характеристик наблюдаемого объекта. Совокупность состояний определяет ситуацию. Понятие "ситуация" является аналогом понятия "образ". Но эта аналогия не полная, так как не всякий образ можно назвать ситуацией, хотя всякую ситуацию можно назвать образом.
Ситуацией принято называть некоторую совокупность состояний сложного объекта, каждая из которых характеризуется одними и теми же или схожими характеристиками объекта. Например, если в качестве объекта наблюдения рассматривается некоторый объект управления, то ситуация объединяет такие состояния этого объекта, в которых следует применять одни и те же управляющие воздействия. Если объектом наблюдения является военная игра , то ситуация объединяет все состояния игры, которые требуют, например, мощного танкового удара при поддержке авиации.
Выбор исходного описания объектов является одной из центральных задач проблемы ОРО. При удачном выборе исходного описания (пространства признаков) задача распознавания может оказаться тривиальной, и наоборот, неудачно выбранное исходное описание может привести либо к очень сложной дальнейшей переработке информации, либо вообще к отсутствию решения. Например, если решается задача распознавания объектов, отличающихся по цвету, а в качестве исходного описания выбраны сигналы, получаемые от датчиков веса, то задача распознавания в принципе не может быть решена.
Распознавание образов применяется для автоматического распознавания печатных, рукописных и фотографированных знаков, текстов, рисунков и схем, для распознавания звуков речи, команд, передаваемых голосом, выявления некоторых ситуаций в сложных технических комплексах, таких как критическое или аварийное состояния и т.д.
Главными целями распознавания образов являются расширение возможностей общения человека с машиной и расширение возможностей автоматизации путем освобождения человека-оператора от многих операций, которые ограничивают быстродействие, надежность и эффективность функционирования автоматизированных комплексов.
Распознавание определяется как процесс отнесения ситуаций, явлений, образов к одному из нескольких или многих заранее определенных классов на основе анализа их характеристик. При распознавании возникают взаимосвязанные задачи выбора параметров распознавания и задачи нахождения и оценки качества решающей функции.
Для выбора параметров предварительно выделяют совокупность параметров (признаков), характеризующих рассматриваемый образ.
Эти признаки могут быть представлены в виде точки в многомерном пространстве, которое называется пространством объекта, а вектор X - вектором объекта.
Вторая взаимосвязанная задача нахождения решающей функции должна рассматриваться с учетом сведений об объектах.
Решающая функция позволяет найти гиперповерхность, разделяющую многомерное пространство на классы.
Широко применяемый непараметрический (адаптивный) метод распознавания базируется на итеративной процедуре оптимизации параметров распознавания.
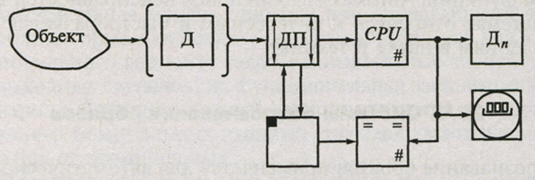
Структурная схема системы распознавания образов
Детектор признаков (ДП) воспринимает физическое воздействие, характеризующие объекты, и выдает на выходе совокупность сигналов, несущих признаки (параметры) распознаваемого образа. В случае необходимости в детекторе признаков производится освобождение (фильтрация) от шумов (помех), нормализация по геометрическим размерам и положению (масштабирование), координатные преобразования и т.д.
Детектор признаков во многих случаях выполняется в виде рецепторного фотоэлектронного поля с системой развертки для распознавания образов или микроЭВМ.
В блоке памяти хранятся программы исходных, промежуточных и конечных данных, а также программы функционирования. Особенность его состоит в необходимости хранения описаний распознаваемых классов и запоминания значений оптимизируемых параметров классификатора.
Блок памяти может содержать оптические маски, магнитные барабаны, аналоговую память и т.д.
Давно хотел написать общую статью, содержащую в себе самые основы Image Recognition, некий гайд по базовым методам, рассказывающий, когда их применять, какие задачи они решают, что возможно сделать вечером на коленке, а о чём лучше и не думать, не имея команды человек в 20.

Какие-то статьи по Optical Recognition я пишу давненько, так что пару раз в месяц мне пишут различные люди с вопросами по этой тематике. Иногда создаётся ощущение, что живёшь с ними в разных мирах. С одной стороны понимаешь, что человек скорее всего профессионал в смежной теме, но в методах оптического распознавания знает очень мало. И самое обидное, что он пытается применить метод из близрасположенной области знаний, который логичен, но в Image Recognition полностью не работает, но не понимает этого и сильно обижается, если ему начать рассказывать что-нибудь с самых основ. А учитывая, что рассказывать с основ — много времени, которого часто нет, становится всё ещё печальнее.
Обратите внимание, статья 2014 года. А сейчас 2021. С тех пор произошло пару революций в ComputerVision. Делает ли это приведенные тут методы неправильными? Нет. Но, скорее всего это не то что вы хотите использовать в качестве первой линии. Что использовать сегодня? Сложно сказать, очень много вариаций. Если хотите оставаться в курсе событий — советую читать мой канал (vk, telegram) про более новые методы/подходы.
Список приведённых тут методов не полон. Предлагаю в комментариях добавлять критические методы, которые я не написал и приписывать каждому по 2-3 сопроводительных слова.
Часть 1. Фильтрация
В эту группу я поместил методы, которые позволяют выделить на изображениях интересующие области, без их анализа. Большая часть этих методов применяет какое-то единое преобразование ко всем точкам изображения. На уровне фильтрации анализ изображения не производится, но точки, которые проходят фильтрацию, можно рассматривать как области с особыми характеристиками.
Бинаризация по порогу, выбор области гистограммы
Самое просто преобразование — это бинаризация изображения по порогу. Для RGB изображения и изображения в градациях серого порогом является значение цвета. Встречаются идеальные задачи, в которых такого преобразования достаточно. Предположим, нужно автоматически выделить предметы на белом листе бумаги:
Выбор порога, по которому происходит бинаризация, во многом определяет процесс самой бинаризации. В данном случае, изображение было бинаризовано по среднему цвету. Обычно бинаризация осуществляется с помощью алгоритма, который адаптивно выбирает порог. Таким алгоритмом может быть выбор матожидания или моды. А можно выбрать наибольший пик гистограммы.
Бинаризация может дать очень интересные результаты при работе с гистограммами, в том числе в ситуации, если мы рассматриваем изображение не в RGB, а в HSV . Например, сегментировать интересующие цвета. На этом принципе можно построить как детектор метки так и детектор кожи человека.
Классическая фильтрация: Фурье, ФНЧ, ФВЧ
Классические методы фильтрации из радиолокации и обработки сигналов можно с успехом применять во множестве задач Pattern Recognition. Традиционным методом в радиолокации, который почти не используется в изображениях в чистом виде, является преобразование Фурье (конкретнее — БПФ ). Одно из немногих исключение, при которых используется одномерное преобразование Фурье, — компрессия изображений. Для анализа изображений одномерного преобразования обычно не хватает, нужно использовать куда более ресурсоёмкое двумерное преобразование.
Мало кто его в действительности рассчитывает, обычно, куда быстрее и проще использовать свёртку интересующей области с уже готовым фильтром, заточенным на высокие (ФВЧ) или низкие(ФНЧ) частоты. Такой метод, конечно, не позволяет сделать анализ спектра, но в конкретной задаче видеообработки обычно нужен не анализ, а результат.
Самые простые примеры фильтров, реализующих подчёркивание низких частот (фильтр Гаусса) и высоких частот (Фильтр Габора).
Для каждой точки изображения выбирается окно и перемножается с фильтром того же размера. Результатом такой свёртки является новое значение точки. При реализации ФНЧ и ФВЧ получаются изображения такого типа:
Вейвлеты
Но что если использовать для свёртки с сигналом некую произвольную характеристическую функцию? Тогда это будет называться "Вейвлет-преобразование". Это определение вейвлетов не является корректным, но традиционно сложилось, что во многих командах вейвлет-анализом называется поиск произвольного паттерна на изображении при помощи свёртки с моделью этого паттерна. Существует набор классических функций, используемых в вейвлет-анализе. К ним относятся вейвлет Хаара, вейвлет Морле, вейвлет мексиканская шляпа, и.т.д. Примитивы Хаара, про которые было несколько моих прошлых статей (1, 2), относятся к таким функциям для двумерного пространства.
Выше приведено 4 примера классических вейвлетов. 3х-мерный вейвлет Хаара, 2х-мерные вейвлет Мейера, вейвлет Мексиканская Шляпа, вейвлет Добеши. Хорошим примером использования расширеной трактовки вейвлетов является задачка поиска блика в глазу, для которой вейвлетом является сам блик:
Классические вейвлеты обычно используются для сжатия изображений, или для их классификации (будет описано ниже).
Корреляция
После такой вольной трактовки вейвлетов с моей стороны стоит упомянуть собственно корреляцию, лежащую в их основе. При фильтрации изображений это незаменимый инструмент. Классическое применение — корреляция видеопотока для нахождения сдвигов или оптических потоков. Простейший детектор сдвига — тоже в каком-то смысле разностный коррелятор. Там где изображения не коррелируют — было движение.
Фильтрации функций

Интересным классом фильтров является фильтрация функций. Это чисто математические фильтры, которые позволяют обнаружить простую математическую функцию на изображении (прямую, параболу, круг). Строится аккумулирующее изображение, в котором для каждой точки исходного изображения отрисовывается множество функций, её порождающих. Наиболее классическим преобразованием является преобразование Хафа для прямых. В этом преобразовании для каждой точки (x;y) отрисовывается множество точек (a;b) прямой y=ax+b, для которых верно равенство. Получаются красивые картинки:
(первый плюсег тому, кто первый найдёт подвох в картинке и таком определении и объяснит его, второй плюсег тому, кто первый скажет что тут изображено)
Преобразование Хафа позволяет находить любые параметризуемые функции. Например окружности. Есть модифицированное преобразование, которое позволяет искать любые фигуры. Это преобразование ужасно любят математики. Но вот при обработке изображений, оно, к сожалению, работает далеко не всегда. Очень медленная скорость работы, очень высокая чувствительность к качеству бинаризации. Даже в идеальных ситуациях я предпочитал обходиться другими методами.
Аналогом преобразования Хафа для прямых является преобразование Радона . Оно вычисляется через БПФ, что даёт выигрыш производительности в ситуации, когда точек очень много. К тому же его возможно применять к не бинаризованному изображению.
Фильтрации контуров
Прочие фильтры

Сверху приведены фильтры, модификации которых помогают решить 80-90% задач. Но кроме них есть более редкие фильтры, используемые в локальных задачах. Таких фильтров десятки, я не буду приводить их все. Интересными являются итерационные фильтры (например активная модель внешнего вида), а так же риджлет и курвлет преобразования, являющиеся сплавом классической вейвлет фильтрации и анализом в поле радон-преобразования. Бимлет-преобразование красиво работает на границе вейвлет преобразования и логического анализа, позволяя выделить контуры:
Но эти преобразования весьма специфичны и заточены под редкие задачи.
Часть 2. Логическая обработка результатов фильтрации
Фильтрация даёт набор пригодных для обработки данных. Но зачастую нельзя просто взять и использовать эти данные без их обработки. В этом разделе будет несколько классических методов, позволяющих перейти от изображения к свойствам объектов, или к самим объектам.
Морфология
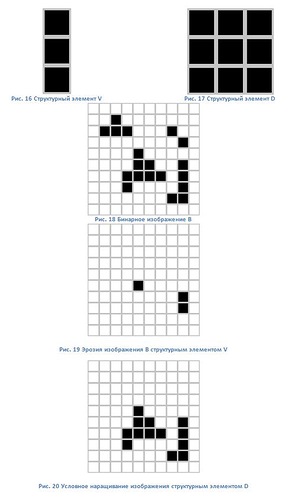
Переходом от фильтрации к логике, на мой взгляд, являются методы математической морфологии (1, 2 , 3). По сути, это простейшие операции наращивания и эрозии бинарных изображений. Эти методы позволяют убрать шумы из бинарного изображения, увеличив или уменьшив имеющиеся элементы. На базе математической морфологии существуют алгоритмы оконтуривания, но обычно пользуются какими-то гибридными алгоритмами или алгоритмами в связке.
Контурный анализ

В разделе по фильтрации уже упоминались алгоритмы получения границ. Полученные границы достаточно просто преобразуются в контуры. Для алгоритма Кэнни это происходит автоматически, для остальных алгоритмов требуется дополнительная бинаризация. Получить контур для бинарного алгоритма можно например алгоритмом жука.
Контур является уникальной характеристикой объекта. Часто это позволяет идентифицировать объект по контуру. Существует мощный математический аппарат, позволяющий это сделать. Аппарат называется контурным анализом (1, 2 ).
Если честно, то у меня ни разу ни получилось применить контурный анализ в реальных задачах. Уж слишком идеальные условия требуются. То граница не найдётся, то шумов слишком много. Но, если нужно что-то распознавать в идеальных условиях — то контурный анализ замечательный вариант. Очень быстро работает, красивая математика и понятная логика.
Особые точки
Особые точки это уникальные характеристики объекта, которые позволяют сопоставлять объект сам с собой или с похожими классами объектов. Существует несколько десятков способов позволяющих выделить такие точки. Некоторые способы выделяют особые точки в соседних кадрах, некоторые через большой промежуток времени и при смене освещения, некоторые позволяют найти особые точки, которые остаются таковыми даже при поворотах объекта. Начнём с методов, позволяющих найти особые точки, которые не такие стабильные, зато быстро рассчитываются, а потом пойдём по возрастанию сложности:
Первый класс. Особые точки, являющиеся стабильными на протяжении секунд. Такие точки служат для того, чтобы вести объект между соседними кадрами видео, или для сведения изображения с соседних камер. К таким точкам можно отнести локальные максимумы изображения, углы на изображении (лучший из детекторов, пожалуй, детектор Хариса), точки в которых достигается максимумы дисперсии, определённые градиенты и.т.д.
Второй класс. Особые точки, являющиеся стабильными при смене освещения и небольших движениях объекта. Такие точки служат в первую очередь для обучения и последующей классификации типов объектов. Например, классификатор пешехода или классификатор лица — это продукт системы, построенной именно на таких точках. Некоторые из ранее упомянутых вейвлетов могут являются базой для таких точек. Например, примитивы Хаара, поиск бликов, поиск прочих специфических функций. К таким точкам относятся точки, найденные методом гистограмм направленных градиентов (HOG).
Третий класс. Стабильные точки. Мне известно лишь про два метода, которые дают полную стабильность и про их модификации. Это SURF и SIFT. Они позволяют находить особые точки даже при повороте изображения. Расчёт таких точек осуществляется дольше по сравнению с остальными методами, но достаточно ограниченное время. К сожалению эти методы запатентованы. Хотя, в России патентовать алгоритмы низя, так что для внутреннего рынка пользуйтесь.
Часть 3. Обучение
Достаточно продолжительное время распознавания образов рассматривались только с биологической точки зрения. При этом наблюдениям подверглись лишь качественные характеристики, которые не позволяли описать механизм функционирования.
Введённое Норбертом Винером(Американский учёный, выдающийся математик и философ, основоположник кибернетики и теории искусственного интеллекта) начале XXвека понятие кибернетика (наука об общих закономерностях процессов управления и передачи информации в машинах, живых организмах и обществе), позволила в вопросах распознавания ввести количественные методы. То есть, представить данный процесс математическими методами.
С задачей распознавания образов живые системы, в том числе и человек, сталкиваются постоянно с момента своего появления. В частности, информация, поступающая с органов чувств, обрабатывается мозгом, который в свою очередь сортирует информацию, обеспечивает принятие решения, а далее с помощью электрохимических импульсов передает необходимый сигнал далее, например, органам движения, которые реализуют необходимые действия. Затем происходит изменение окружающей обстановки, и все явления происходят заново.
Цель данной работы – познакомиться с понятиями теории распознавания образов: раскрыть основные определения, выделить основные методы и принципы теории.
Актуальность данной темы заключается в том, что на данный момент распознавание образов – это одно из ведущих направлений кибернетики. Так, в последние годы оно находит всё больше применение: оно упрощает взаимодействие человека с компьютером и создаёт предпосылки для применения различных систем искусственного интеллекта.
Глава 1
Теория
Теория распознавания образов – это раздел кибернетики, развивающий теоретические основы и методы классификации и идентификации предметов, явлений, процессов, сигналов, ситуаций и т.п. объектов, которые характеризуются конечным набором свойств и признаков. Такие задачи решаются довольно часто, например, при переходе или проезде улицы по сигналам светофора. Распознание цвета загоревшейся лампы светофора и знание правил дорожного движения позволяет принять правильное решение о том, можно или нельзя переходить улицу в данный момент.
История развития
К середине 50-х годов Роджер Пенроуз (Английский физик и математик, работающий в различных областях математики, общей теории относительности и квантовой теории) ставит под сомнение нейросетевую модель мозга, указывая на существенную роль в его функционировании квантово-механических эффектов. Отталкиваясь от этого, Фрэнк Розенблатт(Известный американский учёный в области психологии, нейрофизиологии и искусственного интеллекта) разработал модель обучения распознавания зрительных образов, названную персептроном.Персептрон передавал сигналы от фотоэлементов, представляющих собой сенсорное поле, в блоки электромеханических ячеек памяти. Эти ячейки соединялись между собой случайным образом в соответствии с принципами коннективизма.
Рис.1 - Схема Персептрона

В основе персептрона лежит математическая модель восприятия информации мозгом. Разные исследователи по-разному его определяют. В самом общем своем виде (как его описывал Розенблатт) он представляет систему из элементов трех разных типов: сенсоров, ассоциативных элементов и реагирующих элементов.
Далее были придуманы различные обобщения персептрона, и функция нейронов была усложнена: нейроны смогли не только умножать входные числа и сравнивать результат с пороговыми значениями, но и применять по отношению к ним более сложные функции. На рисунке 2 изображено одно из подобных усложнений:
Рис. 2- Схема нейронной сети.

Кроме того, топология нейронной сети могла быть еще более усложненной. Например, такой:
Рис. 3 - Схема нейронной сети Розенблатта.

Нейронные сети, будучи сложным объектом для математического анализа, при грамотном их использовании, позволяли находить весьма простые законы данных. Но это достоинство одновременно является и источником потенциальных ошибок. Трудность для анализа, в общем случае, объясняется только сложной структурой, но, как следствие, практически неисчерпаемыми возможностями для обобщения самых различных закономерностей.
Принципы классификации и типы систем распознавания
Системы распознаванияделятся на: -простые; -сложные.
Простые системы характеризуются единой физической природой признаков.
1) только масса - для систем распознавания жетонов, монет в автоматах таких, как междугородный телефон, турникет метро;
Сложные системыхарактеризуются физической неоднородностью признаков.
По принципу получения апостериорной информации (Информация, полученная в результате проведённого эксперимента) сложные системы распознавания делятся на:
В одноуровневых системах распознавания информация о признаках распознаваемого объекта (апостериорная информация) формируется непосредственно на основе обработки прямых измерений.
К одноуровневым системам относят, например, читающие автоматические распознающие устройства, автоматы для размена монет, автоматические устройства, предназначенные для отбраковки деталей, в качестве признаков используются некоторые линейные размеры, либо масса и т.п.
В многоуровневых системах распознавания информация о признаках формируется на основе косвенных измерений как результат функционирования вспомогательных распознающих устройств (пример: измерение дальности радиолокатором по времени задержки излученного импульса).
Многоуровневые сложные системы распознавания отличаются от одноуровневых тем, что не все признаки от разнородных физических измерителей используются непосредственно для решения задачи распознавания.
По количеству первоначальной априорной информации (Информация, которая была получена ранее рассматриваемого момента времени) системы распознавания делятся на:
-системы без обучения;
-обучающиеся (ОСР) и самообучающиеся системы (ССР).
Системы без обучения.
Для построения таких систем необходимо располагать полной первоначальной априорной информацией
Обучающиеся системы.
Для обучающихся систем мы должны иметь дело с ситуацией, когда априорной информации не хватает для описания распознаваемых классов на языке признаков. (Возможны случаи, когда информации хватает, однако делать упомянутое описание нецелесообразно или трудно).
Самообучающиеся системы.
Определен словарь признаков распознавания. Однако для организации процесса обучения задается некоторый набор правил, в соответствии с которым система сама вырабатывает классификацию.
Примером самообучающейся системы может быть система разделения на классы промышленных предприятий для сравнительного анализа эффективности их функционирования. При этом в качестве правил классификации могут быть указания либо о равенстве объемов выпускаемой продукции, либо о равенстве численности рабочих и т.п.).
По характеру информации о признаках распознавания системы подразделяются на:
-детерминированные (системы, в которых элементы взаимодействуют точно предвидимым образом);
-вероятностные(система, выходы которой случайным образом, а не однозначно зависят от входов);
-логические(система представления, в основе который лежат логические средства-логики высказываний);
-структурные - лингвистические (множество элементов языка, связанных друг с другом теми или иными отношениями, образующее определённое единство и целостность);
-комбинированные(системы, представляющие собой сочетания несущих конструкций различных типов.В комбинированных системах обычно одно конструктивные элементы предназначены для рабоы в основном на изгиб или поперечную силу);
© 2014-2022 — Студопедия.Нет — Информационный студенческий ресурс. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав (0.007)
Читайте также: