
Метод потенциальных кривых кратко
Обновлено: 05.07.2024
Потенциальная яма — это, конечно, выражение образное. Вспомним подобные выражения: не вешать носа, развесить уши, дать прикурить, говорить под руку, искать ветра в поле. Ясно, что повесить нос можно только в переносном смысле, а вот загрустить, впасть в уныние — это бывает.
Потенциальную яму каждый из нас наблюдает чуть ли не ежедневно. Представьте, например, что на столе стоит стакан чая с чайной ложечкой внутри и блюдце. Размешав чай, вы хотите положить ложечку на блюдце. Для этого надо совершить работу — поднять ложечку выше стакана, преодолеть потенциальный барьер. Положение ложечки и в стакане, и на блюдце — устойчиво. Если чаепитие происходит, скажем, в вагоне движущегося поезда, то небольшие толчки или сотрясения оставят ложечку на месте и в стакане, и на блюдце. В этой простейшей ситуации дно стакана и блюдце — это две потенциальные ямы, а ложечка — перекатываемый из одной ямы в другую шарик.
Электрический выключатель. На рисунке 2 изображена схема электрического выключателя, когда электрическая цепь разомкнута. При повороте пластмассового рычажка АВ вокруг точки О против часовой стрелки пружина из положения KA переходит в положение KA′ и замыкает цепь. На этом пути пружина сначала сжимается (ее потенциальная энергия увеличивается), потом разжимается. Почему? Да потому, что в треугольнике АОK сумма длин двух сторон АО и АK больше длины стороны KО. Когда пружина и отрезок АО располагаются на отрезке KО, пружина неизбежно оказывается сжатой. Крайние положения пружины — это потенциальные ямы. Оба эти положения пружины (и рычажка АВ) устойчивы.
Проведем простой эксперимент. Если слегка нажать на клавишу настенного включателя и затем отпустить ее, то клавиша, щелкнув, вернется в исходное положение. Это и есть явное проявление устойчивости. Никакие слабые случайные возмущения этого устройства (т.е. несильные толчки или сотрясения) не нарушат состояние системы: электрическая цепь останется либо замкнутой, либо разомкнутой, т.е. будет функционировать устойчиво.
На рисунке 2 представлена, как говорят, принципиальная схема выключателя, в каждом конкретном случае она реализуется разными технологическими решениями.
Велосипедная подножка. Теперь обратим свое внимание на велосипед, а точнее — на атрибут современных велосипедов, называемый подножкой (рис. 3). Это устройство призвано удерживать неподвижный велосипед от падения.
Снова рассмотрим лишь принципиальную схему устройства, т.е. будем говорить только о важнейших его элементах, не вдаваясь во все детали. Таких элементов здесь всего два — собственно подножка и пружина. Они вместе играют роль чайной ложечки. Пусть один конец пружины закреплен в точке K, в положении ОА подножка убрана, а в положении OA′ она удерживает велосипед от падения (рис. 4). Если мы переводим подножку из одного положения в другое, то пружину мы вначале растягиваем. Про достижении на пути из ОР в OP′ серединного положения пружина начинает сжиматься и подножка с ударом переходит в новое устойчивое положение. Потенциальный барьер соответствует неустойчивому положению пружины (и подножки). Малейшее отклонение подножки от этого положения или же придание ей скорости мгновенно переводит систему в одно из устойчивых положений. На деле одно из этих устойчивых положений соответствует убранной подножке, и оно востребовано при движении велосипеда. Другое устойчивое положение подножки, опирающейся на землю, используют для покоящегося велосипеда.
Обратите внимание: на практике важны именно устойчивые положения равновесия! Использование же неустойчивых точек покоя — явления редкие, можно сказать, экзотические. Вот поэтому и демонстрируют их цирковые эквилибристы или же переходящие через горные ущелья канатоходцы.
Если же при отклонении системы от положения равновесия появляется сила, возвращающая систему в исходное состояние, то это положение равновесия называют устойчивым. Примером служит шарик, находящийся в ямке (или ложбине).
Для сжатия или растяжения пружины требуется совершить некоторую работу. Эта работа приводит к увеличению потенциальной энергии, накопленной пружиной. Деформированная пружина стремится вернуться в исходное недеформированное состояние, которому соответствует минимум потенциальной энергии. Недеформированное состояние пружины является устойчивым потому, что ее растяжение или сжатие вызывает появление силы упругости, которая стремится вернуть пружину (и связанную с ней систему) в исходное состояние.
Где еще применяют такие пружины. Существует очень много механических реализаций рассмотренных принципиальных схем и их модификаций. Даже на фотоаппарате, которым были сделаны снимки, представленные далее на рисунках 5–7, прикрывающая контакты крышка в положениях открыто / закрыто фиксируется подобным запирающим устройством.
Механизм, удерживающий форточку в трамвае в состоянии открыто / закрыто (см. рис. 6), фактически описан в статье.
А теперь — конструкторская задача. На рисунке 7 показаны две банки для чая. Их замки действуют согласно изложенному в нашей статье принципу. А где же здесь пружина? Оказывается, роль пружины выполняет эластичная резиновая прокладка, укрепленная по периметру крышки (одновременно эта прокладка обеспечивает герметичность банки). При закрывании банки крышка вначале прижимается к ней, а потом чуть-чуть (примерно на миллиметр) поднимается вверх. Оба рычага столь жесткие, что практически не деформируются. Прокладка, будучи деформированной и потом освобожденной от внешнего воздействия, легко приподнимает крышку. Если удалить прокладку, система перестает действовать.
velimudr 14.05.2021 18:57 Ответить
Интересно, но мало. Здесь лично я вижу кучу тем, которые связаны с устойчивостью, неустойчивостью, равновесием и т.п. Например, что такое динамическое равновесие, как могут стабильно существовать неравновесные системы. Ну и вообще, в народе "потенциальная яма" больше ассоциируется с электричеством, нежели с механикой.
Рассматривается одномерное движение тела (потенциальная энергия — функция лишь одной переменной).
Рассматриваются только консервативные системы (в них механическая энергия превращается только в механическую).
Потенциальная кривая_
График зависимости потенциальной энергии от некоторого аргумента.
Анализ потенциальной кривой для тела в однородном поле тяжести__
Анализ потенциальной кривой для упругодеформированного тела
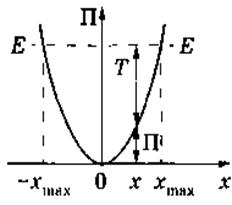
Зависимость потенциальной энергии упругой деформации от деформации х — потенциальная кривая — имеет вид параболы. График заданной полной энергии тела Е — прямая ЕЕ, параллельная оси х.
♦ Потенциальная энергия П при деформации х определяется отрезком вертикали, заключенным между точкой х на оси абсцисс и потенциальной кривой.
♦ Кинетическая энергия Т при деформации х задается ординатой между потенциальной кривой и горизонтальной прямой ЕЕ.
♦ С возрастанием деформации х потенциальная энергия тела возрастает, а кинетическая - уменьшается.
♦ Абсцисса хмах определяет максимально возможную деформацию растяжения тела, а -xmax — максимально возможную деформацию сжатия тела.
♦ Если х = ±хшах, то T = 0 и т. е. потенциальная энергия становится
максимальной и равной полной энергии.
♦ При полной энергии тела, равной Е, тело не может сместиться правее xmax и левее - хтax, так как кинетическая энергия не может быть отрицательной и, следовательно, потенциальная энергия не может быть больше полной энергии. В таком случае говорят, что тело находится в потенциальной яме с координатами –x max х x max.
Анализ потенциальной кривой (общий случай)
♦ Рассматривается одномерное движение тела (потенциальная энергия — функция лишь одной переменной (например, координаты х)).
♦ Рассматриваются только консервативные системы (в них механическая энергия превращается только в механическую).
Анализ потенциальной кривой произвольной формы_
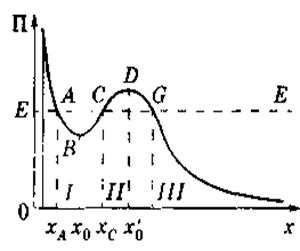
В общем случае потенциальная кривая может иметь достаточно сложный вид, например с несколькими чередующимися максимумами и минимумами (см. рисунок).
График заданной полной энергии частицы — прямая ЕЕ, параллельная оси х.
Частица может находиться только там, где П(х) Е, т. е. в областях I и III.
Переходить из области I в III и обратно частица не может, так как ей препятствует потенциальный барьер CDG, ширина которого равна интервалу значений х, при которых Е
Рассматривается одномерное движение тела (потенциальная энергия — функция лишь одной переменной).
Рассматриваются только консервативные системы (в них механическая энергия превращается только в механическую).
Потенциальная кривая_
График зависимости потенциальной энергии от некоторого аргумента.
Анализ потенциальной кривой для тела в однородном поле тяжести__
Анализ потенциальной кривой для упругодеформированного тела
Зависимость потенциальной энергии упругой деформации от деформации х — потенциальная кривая — имеет вид параболы. График заданной полной энергии тела Е — прямая ЕЕ, параллельная оси х.
♦ Потенциальная энергия П при деформации х определяется отрезком вертикали, заключенным между точкой х на оси абсцисс и потенциальной кривой.
♦ Кинетическая энергия Т при деформации х задается ординатой между потенциальной кривой и горизонтальной прямой ЕЕ.

♦ С возрастанием деформации х потенциальная энергия тела возрастает, а кинетическая - уменьшается.
♦ Абсцисса хмах определяет максимально возможную деформацию растяжения тела, а -xmax — максимально возможную деформацию сжатия тела.
♦ Если х = ±хшах, то T = 0 и т. е. потенциальная энергия становится
максимальной и равной полной энергии.
♦ При полной энергии тела, равной Е, тело не может сместиться правее xmax и левее - хтax, так как кинетическая энергия не может быть отрицательной и, следовательно, потенциальная энергия не может быть больше полной энергии. В таком случае говорят, что тело находится в потенциальной яме с координатами –x max х x max.
Анализ потенциальной кривой (общий случай)
♦ Рассматривается одномерное движение тела (потенциальная энергия — функция лишь одной переменной (например, координаты х)).
♦ Рассматриваются только консервативные системы (в них механическая энергия превращается только в механическую).
Анализ потенциальной кривой произвольной формы_
В общем случае потенциальная кривая может иметь достаточно сложный вид, например с несколькими чередующимися максимумами и минимумами (см. рисунок).
График заданной полной энергии частицы — прямая ЕЕ, параллельная оси х.
Частица может находиться только там, где П(х) Е, т. е. в областях I и III.
Переходить из области I в III и обратно частица не может, так как ей препятствует потенциальный барьер CDG, ширина которого равна интервалу значений х, при которых Е
Механи́ческое равнове́сие — состояние механической системы, при котором сумма всех сил, действующих на каждую её частицу, равна нулю и сумма моментов всех сил, приложенных к телу относительно оси вращения, также равна нулю.
Неустойчивое равновесие. В случае, когда вторая производная отрицательна, потенциальная энергия системы находится в состоянии локального максимума. это означает, что положение равновесия неустойчиво. Если система будет смещена на небольшое расстояние, то она продолжит своё движение за счёт сил, действующих на систему.
Устойчивое равновесие. Вторая производная > 0: потенциальная энергия в состоянии локального минимума, положение равновесия устойчиво. Если систему сместить на небольшое расстояние, она вернётся назад в состояние равновесия. Равновесие устойчиво, если центр тяжести тела занимает наинизшее положение по сравнению со всеми возможными соседними положениями.
Рыночное равновесие называют устойчивым, если при отклонении от равновесного состояния в действие вступают рыночные силы, восстанавливающие его. В противном случае равновесие неустойчиво.
Механическая энергия. Выражение для механической энергии. Закон сохранения механической энергии.
Полной механической энергией системы тел называется сумма кинетической и потенциальной энергий:
Полная механическая энергия может изменяться в результате следующих причин:1)внешнего воздействия на систему (толчки, приближение из вне магнита, заряженных тел и т.п.);2)наличия внутренних неконсервативных сил.
Закон сохранения механической энергии:
Полная механическая энергия замкнутой системы тел, между которыми действуют только консервативные силы, остаётся постоянной.
Момент импульса материальной точки относительно точки пространства. Момент силы относительно точки. Изменение момента импульса мат. Точки и сист. Тел.
Момент импульса частицы относительно некоторого начала отсчёта определяется векторным произведением её радиус-вектора и импульса: L=r*p
Где r — радиус-вектор частицы относительно выбранного неподвижного в данной системе отсчёта начала отсчёта, p — импульс частицы.
Для нескольких частиц момент импульса определяется как (векторная) сумма таких членов:
где — радиус-вектор и импульс каждой частицы, входящей в систему, момент импульса которой определяется.
Закон изменения момента импульса тела или системы тел
Для замкнутой системы тел момент внешних сил всегда равен нулю, так как внешние силы вообще не действуют на замкнутую систему.
Поэтому , то есть или
Закон сохранения момента импульса: момент импульса замкнутой системы тел относительно любой неподвижной точки не изменяется с течением времени.
Момент силы— векторная физическая величина, равная произведению радиус-вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело.
В системе СИ единицами измерения для момента силы является ньютон-метр. момент силы частицы определяется как векторное произведение:
где F — сила, действующая на частицу, а r — радиус-вектор частицы.
Кинетическая энергия вращения твердого тела

Рассмотрим абсолютно твердое тело, вращающееся около неподвижной оси , проходящей через него. Мысленно разобьем это тело на маленькие объемы с элементарными массами , находящиеся на расстоянии от оси. При вращении твердого тела относительно неподвижной оси отдельные его элементарные объемы массами опишут окружности различных радиусов и имеют различные линейные скорости . Но так как мы рассматриваем абсолютно твердое тело, то угловая скорость вращения этих объемов одинакова:

(1)
Кинетическую энергию вращающегося тела найдем как сумму кинетических энергий его элементарных объемов:

.
Используя выражение (1), получаем:

,
где – момент инерции тела относительно оси .
Плоским (плоскопараллельным) назыв. такое движение, при котором все его точки перемещаются параллельно некоторой неподвижной плоскости. Уравнения плоского движения: xA= f1(t), yA= f2(t), j = f3(t), точка А назыв. полюсом. Плоское движение тв.тела слагается из поступательного движения, при котором все точки тела движутся так же, как полюс (А),и из вращательного движения вокруг этого полюса. Поступательное перемещение зависит от выбора полюса, а величина и направление угла поворота не зависят.
© 2014-2022 — Студопедия.Нет — Информационный студенческий ресурс. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав (0.004)
Метод потенциальных кривых дает возможность рассмотреть влияние материала электрода на энергию активации процессов разряда и ионизации. Влияние материала электрода прежде всего отражается на величине энергии или теплоты адсорбции. В водных растворах положение кривой аа не меняется, а кривая bb пройдет тем ниже, чем больше теплота адсорбции. [1]
Для иллюстрации роли обратного процесса полезно воспользоваться методом потенциальных кривых . [3]
Недавно Клейнпауль [4] подробно исследовал предложенный школой Поляни метод потенциальных кривых . [4]
Указанное эмпирическое соотношение, называемое соотношением Поляии - Семенова, может быть качественно истолковано методом потенциальных кривых . [6]
Термодинамические, а также и кинетические особенности электрохимических реакций на интерметалличееких фазах удобно иллюстрировать методом потенциальных кривых . На рис. 12 показана качественная диаграмма энергетических изменений при образовании интерметаллической фазы и при переходе частицы из этой фазы в раствор электролита. [7]
Рассмотрим теперь влияние энергетических изменений ионов ком - понентов в сплаве на кинетику электрохимических реакций. Для этого воспользуемся методом потенциальных кривых , описание которого было дано в предыдущей главе. На рис. 113, а дана качественная энергетическая диаграмма для двухкомпонентной интерметаллической фазы до установления гальванической разности потенциалов. [9]
При наличии необходимых данных, по крайней мере для реакции замещения типа А ВС АВ С, он успешно применил метод последовательных потенциальных кривых и рассчитал энергии активации с удивительной точностью. Возможно, что логическое развитие идеи Клейнпауля может привести к хорошим результатам и для реакций других типов. [10]
Из уравнений ( ХХ-29) и ( ХХ-33) следует также, что перенапряжение должно уменьшаться под влиянием всех факторов, увеличивающих ток обмена. Наиболее важными из них следует считать природу металла и растворителя. Для качественной оценки влияния этих факторов на величину электрохимического перенапряжения весьма удобным оказался метод потенциальных кривых , предложенный Гориучи и Поляни в 1935 г. С помощью этого метода Го-риучи и Поляни дали описание процесса катодного выделения водорода и получили качественно совпадающую с опытом зависимость между электрохимическим перенапряжением и плотностью тока. Здесь в качестве примера будет рассмотрено выделение водорода из кислых растворов. Электрохимический акт отвечает в данном случае переходу протона из состояния гидратированного иона в состояние атома водорода, адсорбированного металлом. Кривая АВД передает изменение свободной энергии гидратированного протона как функцию расстояния между протоном и молекулой воды. Потенциальная кривая NCBF отвечает увеличению ( или уменьшению) свободной энергии системы Н - М с изменением расстояния между адсорбированным атомом водорода и поверхностью металла. [11]
Недавно Клейнпауль [4] подробно исследовал предложенный школой Поляни метод потенциальных кривых. При наличии необходимых данных, по крайней мере для реакции замещения типа А ВС АВ С, он успешно применил метод последовательных потенциальных кривых и рассчитал энергии активации с удивительной точностью. Возможно, что логическое развитие идеи Клейнпауля может привести к хорошим результатам и для реакций других типов. [12]
Чтобы пептизировать коагулят, его необходимо отмыть от коагулирующего электролита и ввести в среду стабилизатор. В качестве стабилизаторов наиболее употребительны электролиты, содержащие ионы, которые могут служить потенциалопреде-ляющими на поверхно - Расстдяние сти частиц. Их называют пептизирующими электролитами. Хорошо изучено действие хлорида железа на свежеосажден-кривые ный гидроксид железа. Для объяснения пеп-тизации пользуются методом потенциальных кривых . Существование минимума связано с появлением на очень коротких расстояниях сил отталкивания между частицами. Отталкивание происходит при сжатии сольватных или адсорбционных слоев. Уменьшение концентрации электролита ( это достигается отмыванием коагулята) расширяет диффузный слой, в результате чего появляется дополнительное отталкивание. [14]
Идентификация и установление структуры многоатомных органич. Электроны с энергией неск. Набор образовавшихся ионов представляет собой молекулярный масс-спектр исходной молекулы. Масс-спектр вещества является его характеристикой и несет информацию о мол. В случае простейших молекул для описания диссоциативной ионизации используют метод потенциальных кривых ( потенциальных поверхностей) в сочетании с принципом Франка - Кондона. [15]
Читайте также: