
Метод мерцалова тмм кратко
Обновлено: 16.05.2024
Для синтеза маховика по методу Мерцалова вычисляется кинетическая энергия ТII звеньев, не связанных с кривошипом постоянным передаточным отношением по формуле ТII=JII∙ωcp 2 /2. Результаты расчета для каждого положения механизма заносим в таблицу. Выбрав масштабный коэффициент μТ=μА=4,16 дж/мм строим график ТII( ). Строим зависимость JII( ), масштабный коэффициент кг м 2 /мм. Далее строим зависимость ∑А=АD+Ас путем сложением с учетом знаков графиков Ас( ) и АD( ). Затем из графика ∑А( ) вычитаем график ТII( ). Полученная кривая ΔТI=∑А-ТII есть зависимость приращения кинетической энергии звеньев механизма, связанных с кривошипом постоянным передаточным отношением. От угла поворота звена приведения .
На построенной кривой ΔТI( ) находим наибольший максимум и наибольший минимум, разность между которыми а=114 мм, позволяет вычислить наибольший размах изменения кинетической энергии
Приведенный момент инерции JI кг м 2 звеньев, связанных с кривошипом постоянным передаточным отношением находим по формуле:
Значение JI включает в себя приведенные к валу кривошипа момент инерции ротора электродвигателя , где , приведенный момент инерции JК, учитывающий массы муфт и зубчатых колес привода; момент инерции кривошипа J01 и момент инерции маховика JМ устанавливаемого на одном валу с кривошипом. Поэтому JM= JI –JО1 –JD -JК
JM=17,7-0,60-0,0132-0,25=16,836 кг м 2
Угловая скорость звена приведения ω при установившемся движении машинного агрегата представляется в виде: ω=ωнач+Δω, где ωнач - неизвестная по величине угловая скорость, приобретаемая звеном приведения к началу установившегося режима за время разгона: Δω( ) - функция приращения угловой скорости при установившемся движении. Так как , а = Const, то график Δω( ) имеет такой же ид что и график ΔТI( ). Масштабный коэффициент угловой скорости рад/(мм∙с 2 ). Линия, соответствующая на графике ω( ) средней угловой скорости , строиться параллельно оси абсцисс и выше на расстоянии мм ординаты . Начало координатных осей на графике ω( ) определяется ординатой мм. Так как начало координат выходит за пределы листа, то ость абсцисс графика ω( ) показывается условно.
Кинематический синтез
Для уменьшения массы и габаритов целесообразно применять конструкцию маховика в виде тяжелого обода, связанного с насаживаемой на вал ступицей, спицами или облегченным диском. Для такого маховика:
где m и D – соответственно масса и средний диаметр обода; плотность материала; , ; b и h – соответственно ширина и толщина обода.
Динамические синтез и анализ проведем для условий установившегося режима.
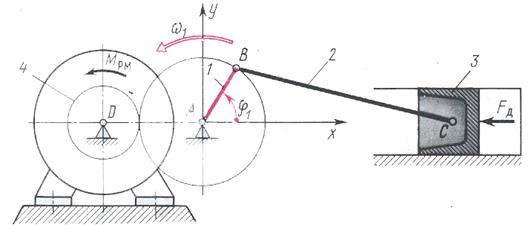
Пусть дана кинематическая схема механизма (рис 5.3).

Рис. 5.3. Схема динамической модели машинного агрегата и приведения масс
Выберем в качестве начального звено, совершающее непрерывное вращательное движение; им обычно бывает главный вал машины. Распределим все подвижные звенья по двум группам и выполним приведение масс. В группу I обязательно входит начальное звено с закрепленным на нем маховиком, а также все те звенья, которые связаны с ним постоянным передаточным отношением; в группу II войдут все остальные звенья механизма; они связаны с начальным звеном переменным передаточным отношением. Так, группу I составят начальное звено 1 и звено 4 (так как u41 = const), группу II – звенья 2 и 3. Заметим, что приведенные моменты инерции звеньев группы I величины постоянные, а звеньев группы П – переменные. Запишем приведенный момент инерции всего механизма:
Решим обе задачи – и динамический синтез, и динамический анализ – наиболее простым и наглядным методом профессора Мерцалова, основанным на применении диаграммы TI(φ1) – кинетической энергии I группы звеньев и пригодным при вращении главного вала с заведомо малой неравномерностью. Сначала выполним динамический синтез, т.е. по допустимому значению [δ] определим необходимый момент инерции маховика. Прежде всего составим формулу для подсчета – приведенного момента инерции I группы звеньев.
Кинетическая энергия I группы звеньев выражается так: Угловая скорость ω1 колеблется внутри цикла между значениями ωmax и ωmin (см. рис. 5.6); следовательно, колеблется и кинетическая энергия TI, проходя через максимальное и минимальное значения. Подчеркнем, что момент инерции имеет постоянную величину, не зависящую от положения механизма.
Определим наибольший перепад кинетической энергии I группы звеньев: . Подставив значения TImах и TImin, получим
откуда, решая относительно искомой величины , получим
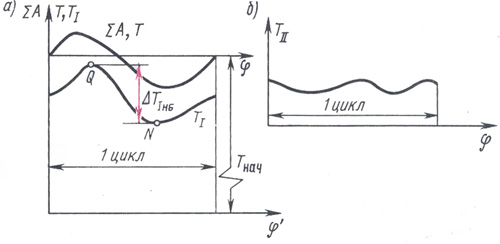
Формула (5.11) является расчетной для определения приведенного момента инерции I группы звеньев, необходимого для обеспечения вращения начального звена с заданной неравномерностью, выраженной коэффициентом [δ], т.е. является уравнением динамического синтеза при установившемся режиме. Заметим, что чем меньше заданное значение [δ], т.е. чем равномернее должно вращаться начальное звено и чем меньше, следовательно, его угловое ускорение, тем больше должен быть необходимый момент инерции , тем массивнее получится маховик, входящий в I группу звеньев. На рис. 5.4 представлены три тахограммы, снятые с одной и той же машины, но при разных маховиках: Jмxl / 1 изображать кинетическую энергию Т всего механизма, как это следует из уравнения (5.13). Вычтем, согласно уравнению (5.12), из кинетической энергии Т кинетическую энергию ТІI и получим нижнюю кривую на рис. 5.5, а. Нижняя кривая, отнесенная к оси φ / 1, и является кривой кинетической энергии ТІ(φ1). Отметим на этой кривой точку максимума Q и точку минимума N и по ним определим наибольший перепад кинетической энергии ΔТІнб; необходимый для подсчета по уравнению (5.11).
Обратим внимание, что для подсчета по формуле (5.11) необходимо знать наибольшее изменение ΔТІнб. Однако ΔТІнб не зависит от начального значения Тнач, и, следовательно, для определения ΔТІнб не нужно знать численное значение Тнач, т.е. не нужно находить положение сдвинутой оси абсцисс φ / 1.

Составим порядок определения момента инерции маховика в соответствии с методом Мерцалова графическим способом:
- приведение сил и моментов, построение диаграммы суммарного приведенного момента ;
- построение диаграммы AΣ(φ1) способом графического интегрирования ;
- построение диаграммы (см. § 5.3);
- определение кинетической энергии ТII по формуле и переход к диа- грамме ТІI(φ1);
- построение диаграммы кинетической энергии ТІ(φ1). по уравнению (5.14) (без выявления положения сдвинутой оси абсцисс) и определение ΔТІнб;
- подсчет по уравнению (5.11) и определение момента инерции маховика Jмх.
В таком же порядке нужно вести расчет и численным способом.
На рис. 5.6 изображены графики, выполненные для расчета маховика по методу Мердалова для машинного агрегата, составленного из ДВС и электрогенератора (см. рис. 5.1, а). Механические характеристики, необходимые для расчета, заданы в функции положения, поскольку вал генератора вращается практически равномерно. Начальным звеном назначим коленчатый вал ДВС – звено 1. Рассмотрим особенности расчета.

Рис. 5.6. Графики для расчета маховика по методу Мерцалова
Сначала сделаем приведение движущей силы Fд и для одного полного цикла получим зависимость приведенного движущего момента . (При исследовании установившегося режима начало цикла может быть выбрано в любом положении начального звена; выберем в качестве начального (нулевого) положения то, в котором точка С поршня 3 занимает крайнюю правую позицию (см. рис. 5.1, а)). Так как маховик может выполнить свое основное назначение только в условиях установившегося режима, то при его расчете непременно должно быть соблюдено основное энергетическое уравнение : Это уравнение обусловливает обязательное равенство за цикл работ движущих сил и сил сопротивления. Поскольку это то
Отсюда, учитывая, что
Подсчитав , нужно определить (рис. 5.6, а). Признаком установившегося режима на рис. 5.6, а является то, что площадки над осью абсцисс и под ней равновелики, а на рис. 5.6, б – то, что ордината кривой AΣ(φ1) в конце цикла равна нулю.
Так как механизм во взятом примере (см. рис. 5.1, а) такой же, как и рассмотренный здесь, то, заключаем, что в состав группы I входят звенья 1 и 4, а в состав группы II – звенья 2 и 3. График приведенного момента инерции представлен на рис. 5.6, в.
Кинетическая энергия ТII определяется уравнением . Пока задача динамического синтеза не завершена, точное текущее значение ω1еще не известно. Но вследствие малости коэффициента неравномерности справедливо приближенное равенство ω1 ≈ ωср. Поэтому можно принять Так как const, то график представляет собой одновременно и график ТІI(φ1), но выполненный в другом масштабе (см. рис. 5.6, в); соотношение между масштабами таково: Таким образом, метод Мерцалова не является, строго говоря, точным, но вследствие малости ошибки вполне пригоден для практических расчетов.
Поскольку ТІI подсчитана не вполне точно, график ТІ(φ1) (рис. 5.6, б и г), а вместе с ним и наибольший перепад ΔТІнб кинетической энергии (см. рис. 5.6, г) содержат некоторую ошибку. При [δ] > 0,10 можно сделать уточнение величины ΔТІнб по формуле, предложенной Д.М. Лукичевым: В этой формуле ТІIn, и ТІIq, – значения кинетической энергии ТІI в тех положениях п и qмеханизма, в которых кинетическая энергия ТІI проходит через свои крайние экстремумы; в уравнение (5.11) следует подставить уточненное значение ΔТ * Інб.
Определив ΔТІнб, подсчитываем по уравнению (5.11) динамического синтеза при установившемся режиме, а затем Jмх. В большинстве случаев момент инерции маховика Jмх преобладает над остальными моментами инерции I группы. Поэтому всякие изменения кинетической энергии ТІ происходят прежде всего за счет изменений кинетической энергии маховика.
Рассмотрим роль маховика. В процессе расширения газа ДВС вырабатывает энергии больше, чем потребляет генератор. Избыток ее идет на увеличение ТІ(участок NQ на рис. 5.6, г), т.е. прежде всего на увеличение кинетической энергии маховика. Во время процесса сжатия газа ДВС сам потребляет энергию на совершение работы сжатия. Генератор в это время также продолжает забирать энергию с вала ДВС. Оба эти расхода энергии возмещаются за счет уменьшения ТІ (участок QN на рис. 5.6, г), т.е. в основном за счет уменьшения кинетической энергии маховика.
Таким образом, маховик то накапливает кинетическую энергию, когда работа двигателя оказывается в избытке, то отдает часть ее. Чем большеJмх (а следовательно, и тем выше аккумулирующая способность маховика, тем меньше будут колебания ω1 при колебаниях потока энергии, тем равномернее будет вращаться вал машины, что видно из уравнения (5.11), решенного относительно δ:
Аккумулирующая способность маховика используется не только для обеспечения допустимой неравномерности хода машин. Так, в автомашинах маховик содействует троганию автомобиля с места. Маховики применяют в машинах ударного действия – молотах, прокатных станах и др. В настоящее время разрабатывают проекты транспортных машин, в которых маховик – механический аккумулятор – будет использоваться как экологически чистый и автономный источник энергии.
Выше было изложено решение задачи динамического синтеза, состоящей в определении момента инерции маховика Jмх, обеспечивающего требуемое условие движения, заданное коэффициентом неравномерности [δ]. Теперь решим задачу динамического анализа, обратную по отношению к задаче синтеза: зная Jмх надо определить закон движения механизма, а затем фактическое значение δ. Для этого должен быть задан момент инерции маховика Jмх, а также размеры, массы, моменты инерции всех звеньев механизма, ωср и механические характеристики. При решении задачи анализа, как и синтеза, используется диаграмма ТI(φ1), которая строится на основе метода Мерцалова (см. рис. 5.6) при условии заведомо малой неравномерности.
Проведем через начальную точку 0" кривой ТI(φ1) ось (на рис. 5.6, г показаны штрихами). Относительно этой новой оси кривая изобразит изменение кинетической энергии ΔTI, которое выражается так:
Так как неравномерность вращения начального звена заведомо мала, то можно принять (ω1 + ωнач)/2 ≈ ωср. Тогда, обозначив ω1 – ωнач= Δω1, получим
Но = const. Следовательно, при установившемся движении с малым значением коэффициента неравномерности δ изменение кинетической энергии приблизительно пропорционально изменению Δω1 угловой скорости начального звена. Кривая на рис. 5.6, г одновременно изображает как , так и Δω1(φ1), но в разных масштабах; соотношение между масштабами таково: График Δω1(φ1), изображен на рис. 5.7.

Коэффициент неравномерности δ определяют по формуле
Угловое ускорение начального звена можно также выразить следующим образом:
В этом случае 1 определяют по диаграмме ω1(φ1) (см. рис. 5.7), применяя графическое или численное дифференцирование.
Решим обе задачи – и динамический синтез и динамический анализ - наиболее простым и наглядным методом Мерцалова, основанным на применении диаграммы . Сначала выполним динамический синтез, составив, прежде всего расчетную формулу для определения приведенного момента инерции I группы звеньев, необходимого для обеспечения заданного значения .
Для динамической модели:
Тогда используя уравнение теоремы об изменении кинетической энергии можно записать:
(с достаточной степенью точности)
Принибрегая маленькими значениями и членами с этими значениями, т.е. , получим:
т.к. , то с учётом этого можно записать:
- формула Н.И. Мерцалова
Формула 8.5 предназначается для расчета маховых масс по Мерцалову Способ Мерцалова основан на определении кинетической энергии всех звеньев механизма и последующим выделением из этой кинематической энергии той ее части, которая приходится только на звено приведения (модель) и на звенья, связанные с ним постоянным передаточным отношением. После этого легко определить искомое значение наибольшего периода кинетической энергии
так как кинетическая энергия механизма (8.7)
 |
тогда (8.8), а (8.9)
 |
Обратим внимание, что для подсчета по формуле (8.5)надо знать не величину кинетической энергии , а ее наибольшее изменение . Но не зависит от начального значения ,и, следовательно, для определения не нужно знать числового значения , т. е. не нужно выявлять положение сдвинутой оси абсцисс .
· приведение сил и моментов; построение диаграммы суммарного приведенного момента ;
· построение диаграммы способом графического интегрирования;
· приведение масс; построение диаграммы ;
· определение кинетической энергии по формуле и переход к диаграмме ;
· построение диаграммы кинетической энергии по уравнению (8.6) (без выявления положения сдвинутой оси абсцисс) и определение ;
· подсчет по уравнению (8.5)и определение момента инерции маховика.
В таком же порядке нужно вести расчет и численным способом с применением ЭВМ.
На рис. 8.5изображены графики, выполненные для расчета маховика по методу Мерцалова для машинной установки, составленной из ДВС и электрогенератора (см. рис. 8.4, а). Механические характеристики, необходимые для расчета, заданы в функции перемещения (см. рис. 8.4, б, в) поскольку вал генератора вращается практически равномерно. Начальным звеном назначим коленчатый вал ДВС - звено 1. Рассмотрим особенности расчета.
Сначала надо сделать приведение движущей силы и для одного полного цикла получить зависимость . Так как маховик может выполнить свое основное назначение только в условиях установившегося режима, то при его расчете непременно должно быть соблюдено основное энергетическое уравнение: . Это уравнение обусловливает обязательное соотношение между работами движущих сил и сил сопротивления, а именно: . Отсюда, учитывая, что , получим .
Подсчитав , нужно определить (рис. 8.5). Признаком установившегося режима на рис. 8.5, а является то, что площадки над осью абсцисс и под ней равновелики, а на рис.8.5, - то, что ордината кривой в конце цикла равна нулю.
Так как механизм во взятом примере такой же, как и рассмотренный в лекции 7, то, используя формулы (7.22 – 7.25), заключаем, что в состав группы I входят звенья 1 и 4, а в состав группы II - звенья 2 и 3. График приведенного момента инерции представлен на рис. 8.5, в.
Кинетическая энергия определяется уравнением . Пока задача динамического синтеза не завершена, точное текущее значение еще не известно. Но вследствие малости коэффициента неравномерности справедливо приближенное равенство . Поэтому можно принять . Так как , то график представляет собой одновременно и график , но выполненный в другом масштабе (рис. 8.5, в); соотношение между масштабами таково: . Таким образом, метод Мерцалова не является, строго говоря, точным, но вследствие малости ошибки вполне пригоден для практических расчетов.
Поскольку подсчитано не вполне точно, график (рис. 8.5, б и г), а вместе с ним и наибольший перепад кинетической энергии (рис. 8.5, г)содержат некоторую ошибку. При можно сделать уточнение величины по формуле, предложенной Д. М. Лукичевым: (см.: Лукичев Д. М. Расчет маховика машины// Вопросы теории механизмов и машин, 1953. № 23). В этой формуле и - значения кинетической энергии в тех положениях п и q механизма, в которых кинетическая энергия проходит свои крайние экстремумы; в уравнение (8.5) следует подставить .
Рассмотрим роль маховика. В процессе расширения газов. (см. рис. 8.4, в) ДВС вырабатывает энергии больше, чем потребляет генератор. Избыток ее идет на увеличение (участок NQ на рис. 8.5, г),т. е. прежде всего на увеличение кинетической энергии маховика. Во время процесса сжатия газов ДВС сам потребляет энергию на совершение работы сжатия. Генератор в это время также продолжает забирать энергию с вала ДВС. Оба эти расхода энергии возмещаются за счет уменьшения (участок QN на рис. 8.5, г), т.е. в основном за счет уменьшения кинетической энергии маховика.
Таким образом, маховик то накапливает кинетическую энергию, когда работа двигателя оказывается в избытке, то отдаетчасть ее. Чем больше (а следовательно, и ) тем выше аккумулирующая способность маховика, тем меньше будут колебания при колебаниях потока энергии, тем равномернее будет вращаться вал машины, что видно из уравнения (8.5),решенного относительно :
Аккумулирующая способность маховика используется не только для обеспечения допустимой неравномерности хода машин. Так, в автомашинах маховик содействует троганию автомобиля с места. Маховики непременно применяются в машинах ударного действия - молотах, прокатных станах и др., - помогая электродвигателю во время удара. В настоящее время разрабатываются проекты транспортных машин, в которых маховик - механический аккумулятор - должен использоваться как экологически чистый и автономный источник энергии.
Выше было изложено решение задачи динамического синтеза, состоящей в определении момента инерции маховика , обеспечивающего требуемое условие движения, заданное коэффициентом неравномерности . Теперь решим обратную задачу - задачу динамического анализа. При установившемся режиме известны все характеристики механизма, в том числе и , требуется определить закон движения, а затем и фактическое значение . Решение этой задачи также основано на применении диаграммы , которая строится по методу Мерцалова (рис. 8.5).
Проведем через начальную точку О" кривой ось (показана на рис.8.5, г штрихами). Относительно этой новой оси кривая изобразит изменение кинетической энергии , которое выражается так:
Так как неравномерность вращения начального звена заведомо мала, то можно приближенно принять . Тогда, обозначив , получим
Но . Следовательно, при установившемся движении с малым значением коэффициента неравномерности изменение кинетической энергии приблизительно пропорционально изменению угловой скорости начального звена. Поэтому кривая на рис. 8.5, г одновременно изображает как , так и , но в разных масштабах; соотношение между масштабами таково: . График изображен на рис. 8.6.
Коэффициент неравномерности определяют по формуле:
Угловое ускорение начального звена при установившемся движении подсчитывают по уравнению
в котором . Значения и берут с соответствующих диаграмм (рис.8.5, а, в); . Производную определяют графическим или численным дифференцированием функции (поскольку ) так как указано в лекции 7. В величинах и - нужно учитывать знак.
Угловое ускорение начального звена можно также выразить следующим образом:
Тогда определяют по диаграмме (рис. 8.6), применяя графическое или численное дифференцирование.
Контрольные вопросы к лекции N8
1. Как оценивать неравномерность хода машины? Как её можно уменьшить?
2. Какие факторы вызывают периодические и непериодические колебания входного звена машины?
3. Сформулируйте основное назначение маховой массы (маховика)?
4. Какова цель установки маховика в машине? Чем следует руководствоваться при выборе места установки маховика в машине?
5. В каких случаях маховик необходим и когда он не требуется?
6. Выведите формулу для расчёта дополнительных маховых масс при постоянном приведённом моменте инерции машины?
Jc – приведенный момент инерции звеньев, связанных со звеном приведения постоянным передаточным отношением (маховых масс машины).
Кинетическую энергию машины представим как сумму
где Т v ≈ ωср 2 Jv /2 ; ωср – средняя угловая скорость звена приведения при установившемся движении.
Изменение кинетической энергии Тc возможно только за счет изменения угловой скорости ω звена приведения.
Экстремальные значения кинетической энергии маховых масс соответственно равны Т c.max = ω max 2 Jc /2 ; Т c.min = ω min 2 Jc /2,
где ω max и ω min – максимальное и минимальное значение угловой скорости начального звена за цикл установившегося движения
где [δ] = (ω max– ω min) / ωср – допускаемый коэффициент неравномерности установившегося движения машины, заданный в исходных данных на проектирование.
Из совместного решения зависимостей четырех последних уравнений получим приведенный момент инерции маховых масс
Последовательность действий при определении момента инерции Jc маховика по методу Мерцалова
Рис. 5.3. Определение момента инерции маховых масс машины методом Мерцалова
где ωср – средняя угловая скорость начального звена приведения при установившемся движении.
Замеряя по оси ординат расстояние между самой верхней и самой нижней точками этой диаграммы, находим отрезок С D .
Затем определяем момент инерции маховых масс:
Выбор электродвигателя
При выборе электродвигателя учитывается ряд требований: режим работы механизма, вид тока (переменный или постоянный), надежность и экономичность электромеханической системы и т.д. В рамках настоящего курсового проектирования задача выбора электродвигателя решается ограниченно и состоит в подборе его марки по табл. 5.1, исходя из его требуемой мощности Р.
Требуемая мощность электродвигателя, кВт:
где Aц – работа, производимая выходным звеном за цикл установившегося движения: Aц = (KL) μТ , (рис. 5.3, б);
n1 – частота вращения кривошипа, мин –1 ;
ñ – число оборотов начального звена за время одного цикла;
η – КПД машины. Ориентировочно примем КПД машины η = 0,8.
По требуемой мощности из табл. 5.1 выбирается асинхронный электродвигатель серии 4А с ближайшей большей стандартной мощностью при заданной синхронной скорости. В табл. 5.1 указаны также величины скольжения S, %, и mD 2 ∙10 – 4, кг ∙ м2 .
Таблица 5.1. Электродвигатели асинхронные серии 4А закрытые, обдуваемые
Синхронная частота вращения nс, мин –1
После выбора электродвигателя определяется частота nд вращения его вала, общее передаточное число u привода и приведенный момент инерции Jпр привода по следующим формулам:
nд = nс (1 – 0,01 S %), мин – 1 ;
Jпр ≈ 1,7 (mD 2 ) u 2 , кг ∙м 2 ,
где mD 2 – произведение массы ротора двигателя на квадрат его диаметра, указанное в табл. 5.1.
Величина момента инерции Jмхв маховика
При расчете маховых масс по методу Мерцалова исходят из предположения, что приведенный момент сил движущих в течение цикла является постоянным. В действительности момент на валу двигателя при установившемся движении тем больше, чем меньше его угловая скорость. Поэтому полученное значение Jмхв приведенного момента инерции маховика является несколько завышенным.
Уточнение расчета выполняется методом последовательных приближений. Из первого приближения находится зависимость угловой скорости ω1 звена приведения от его угла φ1 поворота. Затем для каждого положения механизма определяется приведенный момент движущих сил. Далее проводятся все описанные ранее действия по методу Мерцалова, в результате которых находится уточненное значение момента инерциимаховика.
При выполнении первого листа проекта необходимо по заданным условиям рассчитать размеры звеньев проектируемого механизма, произвести структурный анализ, определить аналоги скоростей звеньев, параметры динамической модели и закон движения начального звена рычажного механизма.
Графическая часть состоит из построения планов механизма в двенадцати положениях, планов скоростей, диаграмм динамической модели и закона движения начального звена. Промежуточные выкладки и расчеты, а также результаты выполнения этих этапов отражаются в пояснительной записке и на листе проекта формата А1. Работу рекомендуется выполнять в такой последовательности.
1. Ознакомиться с заданием и числовыми значениями исходных данных. Задание на проект отразить в пояснительной записке.
2. Спроектировать кинематическую схему рычажного механизма, т.е. определить недостающие длины звеньев. Расчеты и результат привести в пояснительной записке.
3. Произвести структурный анализ механизма, учитывая рекомендации § 2.3. Перед выполнением структурного анализа на основании схемы, приведенной в задании или полученной в результате синтеза, построить кинематическую схему рычажного механизма.
4. Вычертить схему механизма в двенадцати положениях.
Кинематическая схема механизма выполняется как можно точнее с масштабным коэффициентом μS , м/мм, при неизменном положении стойки и размещается в левой верхней части листа. Построение должно занимать примерно 1/5. 1/6 площади листа.
Построение начинают с размещения на чертеже неподвижных шарниров вращательных пар и направляющих поступательных кинематических пар. Затем вычерчивают двенадцать равноотстоящих друг от друга по углу поворота кривошипа. При этом желательно отсчет начать от одного из крайних положений ведомого звена. С этого, нулевого, положения начинается отсчет и нумерация положений. Направление нумерации положений должно совпадать с направлением вращения начального звена.
Если второе крайнее положение механизма не попадает в число фиксированных двенадцати положений, то следует ввести соответствующее ему промежуточное, тринадцатое, обозначив его, как и соседнее фиксированное положение, но со штрихом, например – положение 7′.
Кинематическая схема механизмов 2-го класса строится методом засечек (см. гл. 4). Одно положение механизма (на рабочем ходу) вычерчивается контурными линиями, а остальные – тонкими. Звенья механизма следует пронумеровать, а центры шарниров обозначить заглавными буквами в одном положении механизма. В остальных положениях центры шарниров можно пронумеровать только цифрами, обозначающими порядковый номер положения механизма.
Затем проверяется возможность вращения кривошипа на полный оборот, а также условие благоприятной передачи сил в механизме. Во всех положениях механизма углы давления не должны превышать допустимых значений (см. гл. 3). Если указанные условия не выполняются, то с помощью руководителя проекта изменить длины звеньев в задании на проект.
5. Определить внешние силы, действующие на звенья.
Сила тяжести i -го звена Gi = mi g , Н,
где m i – масса i -го звена ; g – ускорение свободного падения.
Если массы m i, кг, и моменты инерции J S i,кг∙ м 2 , звеньев в задании на курсовой проект отсутствуют, то для стержневых звеньев определять их по следующим формулам:
m i= (10…20) l i ;J S i = m i l i 2 /10.
Здесь l i−длина звена, м.
Момент инерции J S 1 начального звена (кривошипа) принимать: J S i = m1 l1 2 ,где m1 и l1 – масса, кг, и длина, м, кривошипа. Массу ползуна принимать в пять раз больше массы кривошипа.
6. Построить графические зависимости внешних сил (FC = FC (φ) полезного сопротивления или движущей силы FД = FД (φ)) от положения механизма или угла φ поворота начального звена в соответствии с графиком внешних сил, указанным в задании на проект. Величина внешней силы оп6еделяется по формулам
где μF − масштабный коэффициент диаграммы сил сопротивления, указанный в задании; у – ордината диаграммы сил сопротивления, изображенная в задании, мм.
В заданиях на проект механизмов компрессоров, насосов и двигателей внутреннего сгорания указываются индикаторные диаграммы, где вместо сил приводятся удельное давление р,МПа, в цилиндре с внутренним диаметром D, мм. В этом случае величина внешней силы, Н:
FC = р π D 2 /4 или FД = р π D 2 /4.
7. Построить планы аналогов скоростей dS / dφ для всех двенадцати положений механизма из одного полюса.
Далее аналоги линейных скоростей точек обозначены как V ′, аналоги β′ угловых скоростей звеньев. План аналогов скоростей строится так же как и план скоростей. Численное значение аналога скорости точки равно скорости этой точки при угловой скорости начального звена ω = 1 с −1 .
Уравнения, на основании которых построены планы аналогов скоростей, и пример построения такого плана для одного положения механизма приводятся в расчетно-пояснительной записке. Масштабный коэффициент плана μ V ‘, м /мм, выбирается таким, чтобы длина аналога скорости конца кривошипа изображалась на чертеже отрезком длиной примерно 100 мм.
Планы вычерчиваются тонкими линиями. На них должны быть показаны все характерные точки механизма, включая центры масс звеньев. Модули аналогов скоростей характерных точек и аналогов угловых скоростей звеньев механизма указываются в специальных таблицах, помещенных в пояснительной записке.
Для всех положений механизма определить значения приведенного момента М пр от внешней силы, действующей на рабочее звено, и сил веса.
Используя построенные ранее графики внешних сил, в пояснительной записке заполнить табл. 5.1. В таблицу вносятся также и некоторые веса звеньев, если они составляют не менее 25% от среднего значения внешней силы и центры масс этих звеньев движутся по траектории, близкой к вертикали.
Приведение сил, внесенных в табл. 5.1,осуществляется по формуле
где М пр..i –приведенный момент сил от внешней силы, действующей на рабочее звено, и сил веса в i -ом положении механизма;
F С. i – величина внешней силы, приложенной к точке n ведомого звена в i-ом положении механизма;
Gk − величина силы тяжести звена k, приложенной в центре масс Sk этого звена в i-ом положении механизма;
V ’ n . i , V ’ Sk . i – аналоги скоростей соответственно точек n и Sk приложения приводимых сил в i -ом положении механизма;
αn .. i , αSk . i –углы между векторами сил и аналогами скоростей точек приложения силв i-ом положении механизма. Приведенный момент силы со своим знаком вносится в табл. 5.2.
Таблица 5.2. Приведенный момент от внешней силы и сил веса
Если работа внешней силы за цикл установившегося движения отрицательна, то на графике изображен приведенный моментом сил сопротивления Мпр.C В противном случае получим приведенный момент сил движущих Мпр.Д .
Здесь следует иметь в виду, что если цикл машины соответствует одному обороту начального звена, то приведенные моменты отыскиваются для двенадцати положений механизма, если же цикл машины происходит за два оборота кривошипа, то приведенные моменты отыскиваются для 24-х положений механизма.
9. Построить диаграмму работ заданных сил в зависимости от угла поворота кривошипа (рис. 5.3, б).
При установившемся движении за цикл справедливо равенство
Масштабный коэффициент диаграммы работ, Дж/мм:
где Н – полюсное расстояние при графическом интегрировании, мм;
Время цикла установившегося движения машины, с:
Расход мощности за цикл, т.е. средняя мощность без учета потерь трения в приводе, равен, кВт:
n1 – частота вращения кривошипа, об/мин;
ñ – число оборотов начального звена за время одного цикла.
Рассчитать приведенный момент инерции механизма для всех его положений внутри цикла установившегося движения.
Приведенный момент инерции Jпр.i механизма в i -ом положении определяются по формуле
где mk – масса k-го звена; JSk – момент инерции k-го звена относительно его центра масс Sk ; V ′ Sk . i – аналог скорости центра масс Sk k-го звена в i -ом положении механизма; β′ k . i – аналог угловой скорости k-го звена в i -ом положении механизма; N – количество приводимых звеньев.
Это выражение записывается в развернутом виде в зависимости от количества приводимых звеньев. Приведенные моменты инерции определяются для каждого звена в отдельности для всех положений механизма. Результаты расчетов сводятся в пояснительную записку в табл. 5.3.
Расчеты могут быть выполнены на компьютере с использованием различных редакторов или программ.
где ωср – средняя угловая скорость начального звена при установившемся движении
Здесь n1 – заданная частота вращения кривошипа, мин – 1 .
Читайте также: