
Механическая система это в физике кратко
Обновлено: 04.07.2024
Механическое движение - это изменение положения тел в пространстве относительно друг друга с течением времени.
Механическое движение может быть прямолинейным или криволинейным, равномерным или неравномерным.
Материальная точка - это тело, размеры и форму которого при решении задачи можно не учитывать.
Условия, при выполнении которых тело можно считать материальной точкой:
1. если его размеры малы по сравнению с расстоянием, которое оно проходит.
2. если оно движется поступательно.
Что такое поступательное движение?
Тело движется поступательно, если все его точки движутся одинаково.
или
Тело движется поступательно, если прямая, проведенная через две точки этого тела, при его перемещении смещается параллельно своему первоначальному положению.
Системо отсчета (СО)
Тело отсчета, связанная с ним система координат и часы для отсчета времени движения образуют систему отсчета.
Тело отсчета - это тело, относительно которого определяется положение других (движущихся) тел.
Таким образом, по предмету изучения механика подразделяется на:
-
; ;
- специальные механические дисциплины: теорию механизмов и машин, сопротивление материалов, гидравлику, механику грунтов и др.
Другой важнейший признак, используемый при подразделении механики на отдельные разделы, основан на тех представлениях о свойствах пространства, времени и материи, на которые опирается та или иная конкретная механическая теория. По данному признаку в рамках механики выделяют такие разделы:
Механическая система
Механика занимается изучением так называемых механических систем.
Механическая система обладает определённым числом степеней свободы, а её состояние описывается с помощью обобщённых координат и соответствующих им обобщённых импульсов . Задача механики состоит в изучении свойств механических систем, и, в частности, в выяснении их эволюции во времени.
Являясь одним из классов физических систем, механические системы по характеру взаимодействия с окружением разделяются на изолированные (замкнутые), закрытые и открытые, по принципу изменения свойств во времени — на статические и динамические.
Наиболее важными механическими системами являются:
Важнейшие механические дисциплины

Второй закон Ньютона

Некоторые курсы механики ограничиваются только твёрдыми телами. Изучением деформируемых тел занимаются теория упругости (сопротивление материалов — её первое приближение) и теория пластичности. В случае, когда речь идёт не о жёстких телах, а о жидкостях и газах, необходимо прибегнуть к механике жидкостей и газов, основными разделами которой являются гидростатика и гидрогазодинамика. Общей теорией, изучающей движение и равновесия жидкостей, газов и деформируемых тел, является механика сплошных сред.
Основной математический аппарат классической механики: дифференциальное и интегральное исчисление, разработанное специально для этого Ньютоном и Лейбницем. К современному математическому аппарату классической механики относятся, прежде всего, теория дифференциальных уравнений, дифференциальная геометрия (симплектическая геометрия, контактная геометрия, тензорный анализ, векторные расслоения, теория дифференциальных форм), функциональный анализ и теория операторных алгебр, теория катастроф и бифуркаций. В современной классической механике используются и другие разделы математики. В классической формулировке, механика базируется на трёх законах Ньютона. Решение многих задач механики упрощается, если уравнения движения допускают возможность формулировки законов сохранения (импульса, энергии, момента импульса и других динамических переменных).
Различные формулировки механики
Все три закона Ньютона для широкого класса механических систем (консервативных систем, лагранжевых систем, гамильтоновых систем) связаны с различными вариационными принципами. В этой формулировке классическая механика таких систем строится на основе принципа стационарности действия: системы движутся так, чтобы обеспечить стационарность функционала действия. Такая формулировка используется, например, влагранжевой механике и в гамильтоновой механике. Уравнениями движения в лагранжевой механике являются уравнения Эйлера — Лагранжа, а в гамильтоновой — уравнения Гамильтона.
Независимыми переменными, описывающими состояние системы в гамильтоновой механике, являются обобщённые координаты и импульсы, а в механике Лагранжа — обобщённые координаты и их производные по времени.
Если использовать функционал действия, определённый на реальной траектории системы, соединяющей некую начальную точку с произвольной конечной, то аналогом уравнений движения будут уравнения Гамильтона — Якоби.
Следует отметить, что все формулировки классической механики, основанные на голономных вариационных принципах, являются менее общими, чем формулировка механики, основанная на уравнениях движения. Не все механические системы имеют уравнения движения, представимые в виде уравнения Эйлера — Лагранжа, уравнения Гамильтона или уравнения Гамильтона — Якоби. Тем не менее, все формулировки являются как полезными с практической точки зрения, так и плодотворными с теоретической. Лагранжева формулировка оказалась особенно полезной в теории поля и релятивистской физике, а гамильтонова и Гамильтона — Якоби — в квантовой механике.
Классическая механика
Границы применимости классической механики
В настоящее время известно три типа ситуаций, в которых классическая механика перестаёт отражать реальность.

- Свойства микромира не могут быть поняты в рамках классической механики. В частности, в сочетании с термодинамикой она порождает ряд противоречий (см.Классическая механика). Адекватным языком для описания свойств атомов и субатомных частиц является квантовая механика. Подчеркнём, что переход от классической к квантовой механике — это не просто замена уравнений движения, а полная перестройка всей совокупности понятий (что такое физическая величина, наблюдаемое, процесс измерения и т. д.)
- При скоростях, близких к скорости света, классическая механика также перестаёт работать, и необходимо переходить к специальной теории относительности. Опять же, этот переход подразумевает полный пересмотр парадигмы, а не простое видоизменение уравнений движения. Если же, пренебрегая новым взглядом на реальность, попытаться всё же привести уравнение движения к виду , то придётся вводить тензор масс, компоненты которого растут с ростом скорости. Эта конструкция уже долгое время служит источником многочисленных заблуждений, поэтому пользоваться ей не рекомендуется.
- Классическая механика становится неэффективной при рассмотрении систем с очень большим числом частиц (или же большим числом степеней свободы). В этом случае практически целесообразно переходить к статистической физике.

Под механической системой в механике понимается совокупность материальных точек (твердых тел), движения которых взаимосвязаны между собой.
Система материальных точек, движение которых не ограничено никакими связями, называется системой свободных материальных точек (примером являются планеты солнечной системы, движение которых по орбитам определяется действующими на них силами).
Определяющим признаком механической системы является наличие сил взаимодействия между отдельными материальными точками (телами) системы.
Действие связей на точки (элементы) механической системы выражается силами, называемыми реакциями связей. Поэтому все силы, действующие на систему несвободных точек, можно разделить на две группы: задаваемые (активные) силы и реакции связей. В то же время все силы, действующие на точки любой механической системы (свободной или несвободной), можно подразделить и по другому признаку: на внешние и внутренние силы.
Внешними называются силы, действующие на точки (тела) системы со стороны материальных точек (тел), не входящих в состав данной механической системы.
Внутренними называются силы взаимодействия между материальными точками (телами) данной механической системы.
Одна и та же сила может быть как внешней, так и внутренней, в зависимости от того, какая механическая система рассматривается. Так, например, реакции подшипников вала являются внешними силами относительно вала. Эти же реакции относятся к внутренним силам, когда рассматривается вся установка.
Рассмотрим механическую систему, состоящую из k материальных точек (тел) M1,M2,M3,…Mk c соответствующими массами m1,m2,m3,…,mk (рисунок 1.1).

- mj × rj — статический момент массы материальной точки относительно центра (полюса) О;
- ∑mj × rj — статический момент массы механической системы относительно центра (полюса);
- ∑mj =M — масса механической системы (арифметическая сумма масс точек системы).

Стоимость мы сообщим в течение 5 минут
на указанный вами адрес электронной почты.
Если стоимость устроит вы сможете оформить заказ.
НАБОР СТУДЕНТА ДЛЯ УЧЁБЫ

- Рамки A4 для учебных работ
- Миллиметровки разного цвета
- Шрифты чертежные ГОСТ
- Листы в клетку и в линейку

Второй закон Ньютона
Классическая механика дает очень точные результаты в рамках повседневного опыта. Но для систем, движущихся с большими скоростями, приближающимися к скорости света, более точные результаты дает релятивистская механика, для систем микроскопических размеров — квантовая механика, а для систем, обладающих обеими характеристиками — квантовая теория поля. Тем не менее, классическая механика сохраняет свое значение, поскольку (1) она намного проще в понимании и использовании, чем остальные теории, и (2) в обширном диапазоне она достаточно хорошо приближается к реальности. Классическую механику можно использовать для описания движения таких объектов, как волчок и бейсбольный мяч, многих астрономических объектов (таких, как планеты и галактики), и даже многих микроскопических объектов, таких как органические молекулы.
Содержание
Описание теории
Перейдем к изложению основных понятий классической механики. Для простоты, мы будем рассматривать только материальную точку, т. е. тело, размером которого можно пренебречь. Движение материальной точки характеризуется несколькими параметрами: её положением, массой, и приложенными к ней силами. Рассмотрим каждый из них по очереди.
В действительности, любое тело, которое подчиняется законам классической механики, обязательно имеет ненулевой размер. Настоящие материальные точки, такие, как электрон, подчиняются законам квантовой механики. Тела ненулевого размера могут испытывать более сложные движения, поскольку может меняться их внутренняя конфигурация, например, потому что теннисный мяч может двигаться, вращаясь. Тем не менее, мы сможем применить к подобным телам результаты, полученные для материальных точек, рассматривая такие тела, как совокупности большого количества взаимодействующих материальных точек. Мы сможем показать, что такие сложные тела ведут себя, как материальные точки, при условии, что они малы в масштабах рассматриваемой задачи.
Радиус-вектор и его производные
Радиус-вектор материальной точки указывает на её положение по отношению к произвольной точке, зафиксированной в пространстве, которая обычно называется началом координат, и обозначается O. Это вектор r соединяющий начало координат с частицей. В общем случае, материальная точка движется, поэтому r является функцией t, промежутка времени прошедшего с произвольного начального момента. Скорость изменения положения со временем, определяется так:

.
Ускорение, или скорость изменения скорости, это:

.
Второй закон Ньютона
Второй закон Ньютона связывает массу и скорость частицы с векторной величиной, известной как сила. Пусть m — масса тела и F — векторная сумма всех приложенных к нему сил (то есть равнодействующая сила.) Тогда второй закон Ньютона выглядит так:

.
Величина mv называется импульсом. В большинстве случаев, масса m не изменяется со временем, и закон Ньютона можно записать в упрощенной форме

где a — ускорение, определенное выше. Не всегда выполняется условие независимости массы от времени. Например, масса ракеты уменьшается по мере использования горючего. В таких случаях последнее выражение неприменимо, и следует пользоваться полной формой второго закона Ньютона.
Второго закона Ньютона недостаточно для описания движения частицы. Дополнительно требуется описание силы F, полученное из рассмотрения сущности физического взаимодействия, в котором участвует тело. Например, сила трения может быть смоделирована как функция скорости частицы, а именно

где λ — некоторая положительная постоянная. Получив независимое выражение для каждой силы, действующей на тело, мы можем подставить его во второй закон Ньютона и получим дифференциальное уравнение, называемое уравнением движения. Продолжая наш пример, примем, что на тело действует только сила трения. Тогда уравнение движения будет иметь вид

.
Это можно интегрировать, что даст

где v0 — начальная скорость. Это означает, что скорость тела экспоненциально уменьшается со временем до нуля. Проинтегрировав последнее выражение, мы можем получить радиус-вектор r тела, как функцию времени.
Важными силами являются сила всемирного тяготения и сила Лоренца для электромагнетизма. Помимо этого, для определения сил, действующих на тело, используется третий закон Ньютона: если мы знаем, что тело A действует с силой F на тело B, значит B должно действовать с равной по величине и противоположной по направлению силой реакции, −F, на A.
Энергия
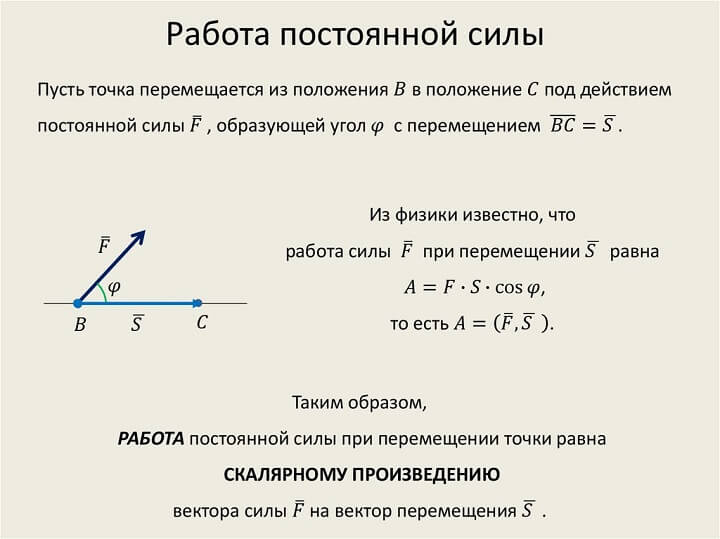
Если сила " width="" height="" />
приложена к частице, которая перемещается на " width="" height="" />
, то работа, совершенная силой, определяется как скалярное произведение силы и вектора перемещения:

Если масса частицы постоянна, а Wtotal полная работа, совершенная частицей, определяемая как сумма работ совершенных приложенными к частице силами, то второй закон Ньютона примет вид:
Wtotal = ΔEk,
где Ek называется кинетической энергией. Для материальной точки, кинетическая энергия определяется как работа силы, ускорившей точку от нулевой скорости до скорости v :

Для сложных объектов, состоящих из множества частиц, кинетическая энергия тела равна сумме кинетических энергий частиц.
Сила называется потенциальной, если существует скалярная функция, известная как потенциальная энергия и обозначаемая Ep , такая что

Если все силы, действующие на частицу консервативны, и Ep является полной потенциальной энергий, полученной суммированием потенциальных энергий соответствующих каждой силе, тогда:
 . |
Этот результат известен как сохранение механической энергии и утверждает, что полная механическая энергия в замкнутой системе, в которой действуют консервативные силы

является постоянной относительно времени. Это очень полезно, потому что часто приходится сталкиваться с консервативными силами.

Что изучает механика в физике
Механика — это одна из физических наук, которая изучает движение тел и их взаимодействие друг с другом во время движения. Этот раздел физики описывает движение как искусственно созданных летательных аппаратов, так и физических небесных объектов; атмосферные и подводные течения; движение жидкостей и газов в природе; перемещение среды в электромагнитных полях; движение крови по сосудам и т.д.
Движение в механике — это изменение во времени и пространстве положения тел (или их частей) относительно друг друга.
Науку механику в зависимости от свойств пространства, времени и материи, на которых основывается каждая механическая теория, подразделяют на следующие виды:
- классическую (раздел физической науки, основанный на открытиях Ньютона и Галилея);
- релятивистскую (раздел физической науки, который описывает процессы механического движения, происходящие при скоростях, сопоставимых со скоростью света);
- квантовую (наука о физических явлениях и процессах, действия которых можно сравнить с постоянной Планка).
Основные направления, формулы и пояснения
В механике выделяют следующие основные разделы:
- кинематику (науку, которая описывает количественные характеристики движения: время, расстояние, скорость);
- статику (науку о телах, находящихся в равновесии при воздействии на них внешних сил);
- динамику (науку о движении тел при воздействии на них внешних сил).
Механика изучает движения материальных тел, при этом все материальные объекты делятся на 3 вида:
- Материальная точка (это материальное тело, чьи размеры можно не учитывать).
- Твердое тело (тело, в котором расстояние между любыми его точками неизменно).
- Сплошная среда (газ, жидкость и другие вещества, подверженные деформации).
По предмету изучения механику подразделяют на:
- теоретическую (наука об общих законах движения, которая изучает и описывает движение материальных точек и твердых тел);
- механику сплошных сред (наука, которая изучает движение тел, непрерывно заполняющих пространство и представляющих собой сплошную среду);
- прикладную (наука, которая описывает принцип работы технических механизмов).
Рассмотрим детальнее основные разделы механики. И начнем с кинематики.
Кинематика
Раздел кинематики отвечает на вопросы о том, как именно происходит механическое движение тела.
Механическое движение
Механическое движение — это перемещение тела с течением времени и относительно других объектов в пространстве.
Для расчета этих изменений понадобится система отсчета, которая состоит из:
- объекта, относительно которого будет происходить отсчет движения;
- системы координат, в которой находится объект отсчета;
- часов (для измерения времени).
В системе отсчета метр является единицей длины, а секунда — единицей времени.
Другими важными определениями в кинематике являются:
- Материальная точка — это объект, размеры которого можно не учитывать в расчетах.
- Траектория движения тела (линия, по которой движется объект).
- Путь, пройденный телом (определенный участок траектории, пройденный объектом за определенное время).
Существует 2 вида движения согласно траектории:
Поступательное и вращательное движение твердого тела
В кинематике выделяют два вида движения:
Поступательное движение — это движение твердого тела, при котором все его точки проходят одну и ту же траекторию и в любой момент времени обладают одинаковыми по направлению и величине векторами скорости и ускорения, синхронно меняющихся для любой точки объекта.
Вращательное движение — это вид механического движения, при котором материальное тело проходит траекторию окружности. При этом все точки тела описывают окружности, которые находятся в параллельных плоскостях. Центры всех окружностей находятся на одной прямой, которая перпендикулярна к плоскостям окружностей (называется осью вращения).
Кинематические уравнения движения
Определение местоположения материальной точки в пространстве можно осуществить двумя способами:
- учитывая зависимость координат от времени;
- учитывая зависимость от времени радиус-вектора.
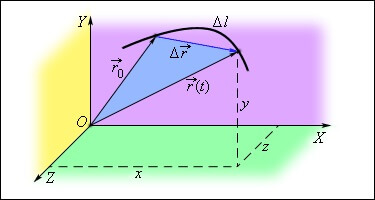
Эту зависимости можно представить в виде кинематических уравнений движения:
\(\vec r=\vec r\left(t\right)\)
Нулевой вектор на данной иллюстрации — это радиус-вектор положения точки в начальный момент времени.
Кинематические характеристики (скорость, ускорение)
Основными кинематическими характеристиками являются:
Скорость \((\vec v)\) — это векторная величина, которая характеризует направление и быстроту движения.
Среднюю скорость можно вычислить по формуле:
где \(\Delta\vec r \) — перемещение, \(\Delta t\) — время, за которое это перемещение произошло.
Символом \(∆\) обозначается разность однотипных величин или совсем маленьких интервалов.
Мгновенная скорость может быть вычислена тогда, когда \(\Delta t\rightarrow0\) и вектор перемещения совпадает с путем перемещения:
Ускорение тела (a) является величиной, равной отношению изменения скорости движения тела к длительности промежутка времени, за которое это изменение скорости произошло. Оно рассчитывается по формуле:
Мгновенным ускорение будет являться тогда, когда среднее ускорение за промежуток ∆t → 0, м/с²:
Динамика, законы Ньютона
Динамика — это раздел механики, который изучает причины изменения движения тел. Классическая механика видит причины этих изменений в воздействии на объекты различных сил. Расскажем подробно, какими параметрами и характеристиками оперирует раздел динамики.
Динамические характеристики поступательного движения
Основными характеристиками в динамике являются:
- Сила ( \(\vec F\) ) — это векторная величина, которая характеризует воздействие тел друг на друга, из-за чего с ними происходят определенные изменения: они приобретают ускорение или подлежат деформации. Сила, как любой вектор, имеет модуль, направление и точку приложения.
- Масса ( \(m\) ) — это физическая величина, характеризующая гравитационные и инерционные свойства объекта.
- Импульс ( \(\vec p\) ) — это векторная величина, которая рассчитывается по формуле: \(\vec p=m\times\vec v\)
где \(m\) — масса тела, а \(\vec v\) — его скорость.
Импульс иллюстрирует, как механическое движение может передаваться от одного материального тела к другому.
- Импульс силы ( \(\vec Fdt\) ) — векторная величина, которая по направлению совпадает с направлением силы и численно равняется произведению силы и времени ее воздействия на тело.
Виды сил
В динамике выделяют несколько видов сил, которые могут воздействовать на объект:
- сила притяжения;
- сила упругости;
- силы трения.
Закон всемирного тяготения, открытый Ньютоном, гласит, что сила ( \(F\) ) гравитационного притяжения между двумя телами массами \((m_1 и m_2)\) , которые находятся на расстоянии ( \(r\) ) друг от друга, пропорциональна обеим массам, обратно пропорциональна расстоянию в квадрате и действует вдоль прямой линии, соединяющей тела.
Сила притяжения определяется по формуле:
где \(G\) — гравитационная постоянная, которая равна \(6,67\times10^ Н*м²/кг²\)
Сила упругости — это сила, возникающая при упругой деформации тела.
Рассчитывается она по формуле:
где \(x\) — величина деформации, \(k\) — коэффициент упругости, а знак - говорит о том, что направление силы упругости всегда противоположно тому направлению, куда смещается тело.
Силы трения возникают при движении касающихся друг друга объектов или их частей. Они бывают:
- сухого трения (сила скольжения, сила покоя);
- вязкого трения (характерно для перемещающихся слоев жидкости или газа).
Сила сухого трения определяется по формуле:
где \(N\) — сила нормального давления, а \(k\) — коэффициент сухого трения.
Сила вязкого трения зависит от скорости движения тела ( \(v\) ) и рассчитывается по формуле:
\(α\) — коэффициент вязкого трения.
Разобрав основные динамические характеристики, можем переходить к основам динамики — законам Исаака Ньютона.
Первый закон Ньютона
Законы Ньютона, опубликованные им в 1687 году, лежат в основе механики. Они помогают описать движение тел с небольшими скоростями по сравнению со скоростью света.
Первый закон Ньютона предполагает существование таких систем отсчета, в которых материальные тела находятся в покое или движутся равномерно и по прямой, при условии, что на них нет воздействия каких-либо сил или действие этих сил скомпенсировано. Такие системы принято называть инерциальными. Все остальные законы Ньютона действительны именно для таких систем.
Первый закон Ньютона также часто называют законом инерции.
Инерция — это сохранение материальным объектом скорости и направления своего движения, при условии, что на него нет воздействия других тел и сил.
Второй закон Ньютона
Второй закон Ньютона иллюстрирует зависимость ускорения тела от его массы и силы, воздействующей на него. Причем чем больше сила, которая действует на объект, тем больше ускорение, которое тело приобретает.
Формулируется он в виде следующей формулы:
где \(\vec F\) — это векторная сила, воздействующая на объект;
\(\vec a\) — векторное ускорение тела;
Читается так: ускорение, с которым движется объект, прямо пропорционально действующей на тело силе и обратно пропорционально массе тела.
Третий закон Ньютона
Третий закон великого английского ученого предполагает, что при воздействии одного тела на другое с определенной силой, второе тело действует на первое с такой же силой. Их часто называют силами действия и противодействия.
Математически закон выражается так:
где \(\vec F_1\) — это сила действия, а \(\vec F_2\) — сила противодействия.
Формулируется так: объекты действуют друг на друга с силами, противоположными по направлению и равными по модулю.
Закон сохранения импульса
Закон сохранения импульса — это следствие из законов Ньютона: при движении тел в инерциальной системе без внешнего воздействия импульс сохраняется во времени, а при воздействии внешних сил на тело, скорость изменения импульса определяется суммой приложенных сил.
Математически это выражается так:
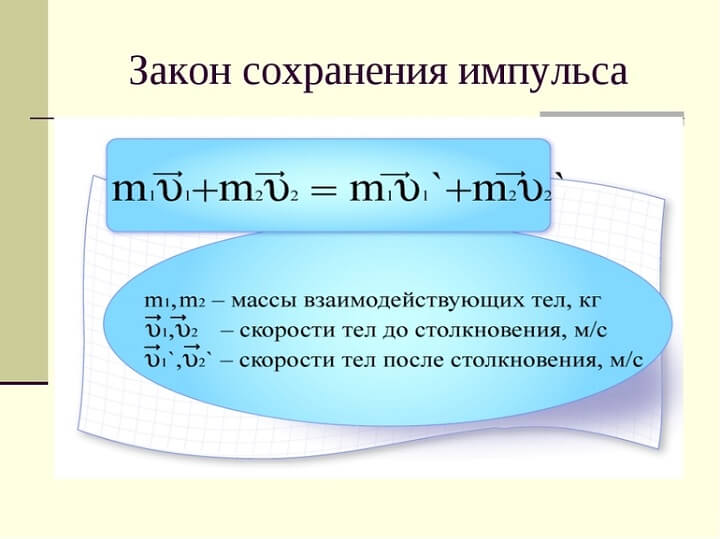
Точнее закон сохранения импульса можно сформулировать таким образом: векторная сумма импульсов всех тел, находящихся в системе, — величина постоянная, если внешнее воздействие на систему отсутствует или же их векторная сумма равна нулю.
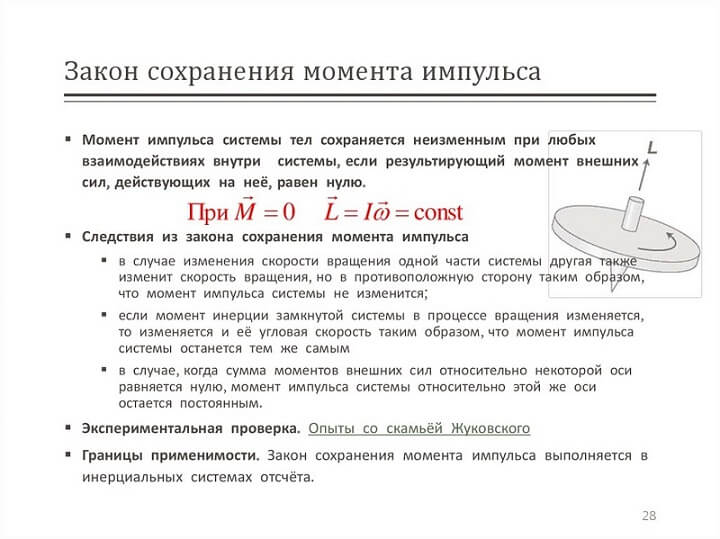
Закон сохранения момента импульса
Закон сохранения момента импульса звучит так: момент импульса тел в замкнутой системе (в которой отсутствует воздействие внешних сил) относительно любой неподвижной точки не изменяется со временем.
Основное уравнение динамики вращательного движения
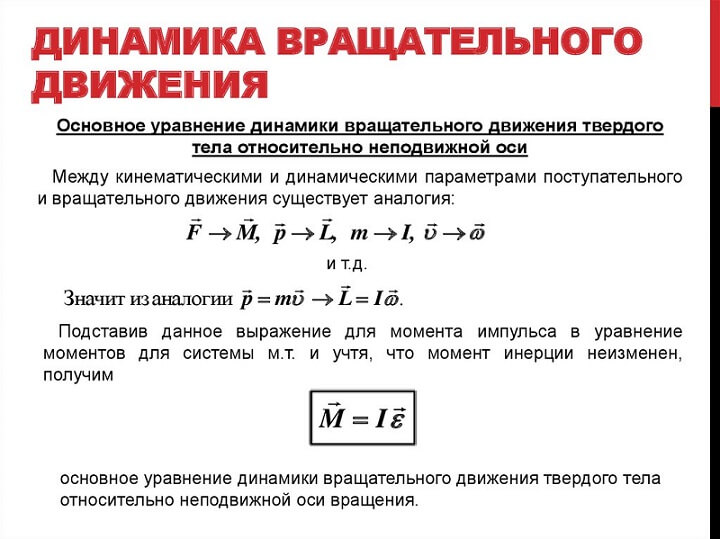
Работа и механическая энергия
Энергия — это способность физических объектов совершать определенную работу, поэтому количественно работа и энергия измеряются в одних и тех же единицах — джоулях (Дж).
Механическая работа будет численно равна изменениям механической энергии. Работа в механике бывает постоянной и переменной силы.
Работа постоянной и переменной силы
Сила, воздействующая на тело, когда перемещает его на определенное расстояние, совершает работу. В том случае, когда сила постоянна по величине и направлению, а движение прямолинейно, можно говорить о работе постоянной силы.
Если траектория движения объекта не прямолинейна, а сила, действующая на тело, не является постоянной, нужно говорить о работе переменной силы. Чтобы ее рассчитать, необходимо весь путь разбить на прямолинейные отрезки. Полная работа будет в таком случае равна сумме работ на всех прямолинейных участках.

Энергия
Энергия — это скалярная величина, которая является количественной мерой различных форм движения материи. Энергия, которая является мерой механического движения и механического взаимодействия тел с другими объектами и между собой, называется механической.
Изменение механической энергии системы ( \(\Delta W\) ) определяется работой ( \(A\) ), которую совершают внешние силы, воздействующие на систему:
Механическая энергия бывает двух видов:
Кинетическая
Кинетическая энергия — это скалярная функция, которая является количественной мерой движения материальных тел, рассматриваемых в конкретной механической системе. Кинетическая энергия зависит только от массы ( \(m\) ) и модуля скорости материальной точки ( \(v\) ).
Рассчитывается кинетическая энергия ( \(E\) ) по формуле:
Измеряется в джоулях.
Потенциальная
Потенциальная энергия — это физическая величина, которая обозначает энергию взаимодействия тел или их частей между собой. Потенциальная энергия зависит только от расстояния, на котором находятся объекты. Имеет числовое значение, но не имеет вектора направления.
Потенциальной энергией обладают следующие виды тел:
- объекты, находящиеся на какой-либо высоте от поверхности земли;
- упруго деформированные тела (пружина);
- сжатые газы.
Потенциальная энергия тела, поднятого над землей ( \(E\) ), рассчитывается по формуле:
\(E=m\times g\times h\)
где \(m\) — масса тела, \(h\) — высота над землей, \(g\) — ускорение свободного падения на нашей планете.
Потенциальная энергия упруго деформированного тела ( \(E\) ) определяется по формуле:
где \(x\) — удлинение, \(k\) — жесткость.
Потенциальная энергия измеряется в джоулях.
Закон сохранения механической энергии
Закон сохранения энергии в механике известен всем со школы.
Энергия не исчезает и не возникает снова, она только переходит из одного вида энергии в другой или передается от одного объекта к другому.
Разобраться в такой сложной науке, как физика, довольно трудно. Не у всех есть время и желание вникать в процессы физических явлений. Но без паники! Подтянуть оценки по сложному предмету поможет образовательный сервис Феникс.Хелп. Обращайтесь в любое время!
Читайте также: