
Маятник это в физике определение кратко
Обновлено: 05.07.2024
Маятник — твердое тело, которое совершает под действием приложенных сил механические колебания около неподвижной точки или оси.
Простейший маятник состоит из небольшого груза массой m, подвешенного на невесомой нити или тонком стержне длиной l и совершающего колебания под воздействием земного притяжения. Если нить считать нерастяжимой, размер груза незначительным по сравнению с длиной нити, а массу нити незначительной по сравнению с массой груза, то груз можно считать материальной точкой массой m, находящейся на постоянном расстоянии l от точки подвеса. Такой маятник называют математическим.
Определение модели системы
Математические модели динамических систем часто используют для анализа самых разных технических, социально-экономических, естественнонаучных систем, в которых происходят циклические процессы.
Существуют различные классификации динамических процессов. Одна из них изображена на схеме:
φ , тогда время t, за которое плоскость колебаний маятника совершает полный оборот, окажется равно
Отсюда следует, что если бы Земля не вращалась, данного эффекта просто не существовало бы. Это обстоятельство указывает на то, что причиной неинерциальности земной системы отсчета является вращение планеты.
Центробежное ускорение на экваторе равно 0 , 034 м / с 2 . По сравнению с экваториальным ускорением свободного падения g = 9 , 78 м / с 2 это величина малая, но она заметно влияет на изменение веса тела на экваторе по сравнению с его весом на полюсе. Если, например, взвешивать на пружинных весах тело массой 10 кг, то уменьшение веса на экваторе за счет действия центробежной силы составит около 35 г.
Период колебаний математического маятника
Период колебаний — время, за которое происходит одно полное колебание. В СИ измеряется в секундах.
Чему равен, от чего зависит частота
Если за время t совершается N колебаний, то период, обозначаемый буквой T, равен
где v — частота колебаний. Она обратно пропорциональна периоду.
Колебания можно изобразить в виде графика:
g — ускорение свободного падения. Не зависит от амплитуды колебаний и массы груза.
Циклическая частота — число колебаний, которые система совершает за 2 π секунды. Также циклическую частоту называют угловой, круговой или радиальной. Кратко ее записывают греческой буквой ω . Она позволяет упростить расчеты с использованием радианов, так как при ее введении сокращаются множители 2 π .
В случае математического маятника она определяется длиной подвеса и ускорением свободного падения:
Для физического маятника в уравнение добавляются инерция и масса подвеса:
Для пружинного маятника частоту определяет жесткость пружины k:
Уравнения движения и их решение, формулы с примерами
Математический маятник — это материальная точка, имеющая массу m и подвешенная на нити с неизменяемой длиной l. Покидая положение равновесия, подвес совершает колебательные движения по дуге.
M = - m g × l sin α .
Угол отклонения мал, поэтому мы учитываем только то, что он отрицателен. Синус угла α считаем приблизительно равным α . Тогда:
m l 2 × α ' ' = - m g l α ;
Это дает нам дифференциальное уравнение гармонических колебаний
Из уравнения следует, что при малых углах отклонения от положения равновесия маятник будет колебаться с периодом
T = 2 π ω = 2 π l g .
Все кинематические характеристики движения меняются по гармоническим законам, т. е. по закону синуса или косинуса. Рассмотрим, от чего зависят константы амплитуды А и начальной фазы движения φ 0 .
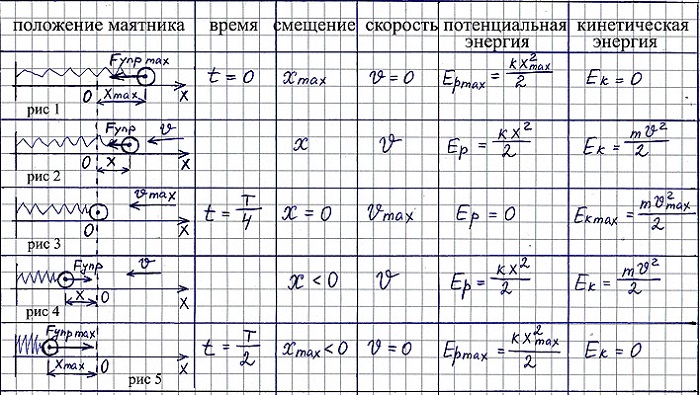
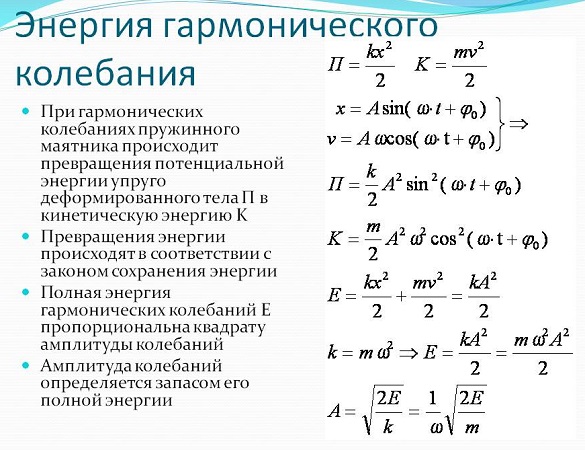
Амплитуда колебаний определяется энергией, переданной маятнику при отклонении от положения равновесия. В случае пружинного маятника в крайнем положении скорость груза и кинетическая энергия равны нулю, полная энергия состоит только из потенциальной энергии:
E п о л н а я = k A 2 2 .
Из этого следует, что
А = 2 E п о л н а я k .
Начальная фаза зависит от того, как маятник вывели из положения равновесия. Рассмотрим ситуацию, в которой маятник отклонили от положения равновесия на расстояние А и отпустили без начальной скорости. Запишем уравнение движения колеблющегося тела с учетом того факта, что в начальный момент координата тела будет равна А:
x = A × cos ω t + φ 0 ;
x ( 0 ) = A × cos ω × 0 + φ 0 = A × cos φ 0 = А ⇒ cos φ 0 = 1 ⇒ φ 0 = 1 .
Уравнение движения маятника:
Если маятник толкнули, когда он находился в положении равновесия, начальная координата колеблющейся точки будет равна нулю:
x ( 0 ) = A × cos ω × 0 + φ 0 = A × cos φ 0 = 0 ⇒ cos φ 0 = 0 ⇒ φ 0 = ± π 2 .
Уравнение движения маятника:
x ( 0 ) = A × cos ω t ± π 2 = ± A × sin ω t .
Рассмотрим задачи, для которых требуется составлять и решать уравнения движения.
Необходимо определить амплитуду и частоту колебаний точки, если известно, что при смещении точки от положения равновесия на 5 см ее скорость равна 6 см/с, а при смещении на 3 см — 10 см/с.
x = A × cos ω t + φ 0 v x = x ' = - A ω × sin ω t + φ 0
Исключаем время из системы:
x = A × cos ω t + φ 0 v x = x ' = - A ω × sin ω t + φ 0 ⇒ x = A × cos ω t + φ 0 v x ω = - A × sin ω t + φ 0 ⇒ x 2 = A 2 × cos 2 ω t + φ 0 v 2 ω 2 = A 2 × sin 2 ω t + φ 0
x 2 + v 2 ω 2 = А 2 .
x 2 А 2 + v 2 v 2 m a x = 1 .
x 1 2 + v 1 2 ω 2 = А 2 x 2 2 + v 2 2 ω 2 = А 2
Преобразовав выражения и подставив значения, данные в условиях задачи, получаем:
ω = v 2 2 - v 1 2 x 1 2 - x 2 2 = 2 c - 1 ;
A = x 1 2 v 2 2 - x 2 2 v 1 2 v 1 2 - v 2 2 ≈ 5 , 57 с м ;
v = ω 2 π ≈ 0 , 32 Г ц .
Необходимо вычислить циклическую частоту колебаний точки, если известно, что при скорости 13 см/с ускорение равнялось 6 с м / с 2 , а при уменьшении скорости до 12 см/с произошло увеличение ускорения до 10 с м / с 2 .
Решение:
Координата точки меняется по закону
Запишем уравнения скорости и ускорения точки:
v x = - A × ω × sin ω t a x = - A × ω 2 × cos ω t ⇒ v x A ω = - sin ω t a x A ω 2 = - cos ω t ⇒ v 2 ω 2 + a 2 ω 4 = A 2 .
Преобразуем уравнение, исключив из него А, и подставим значения, данные в условиях задачи:
ω = a 2 2 - a 1 2 v 1 2 - v 2 2 = 1 , 6 c - 1 .
Практическое применение математического маятника
С помощью математического моделирования динамических систем можно обнаружить схожесть динамических процессов в реальных физических, технических, биологических, химических и социально-экономических системах. Разработка моделей, позволяющих предсказывать время и другие характеристики периодических процессов в этих системах, является эффективным способом анализировать, например, сельскохозяйственные или производственно-экономические процессы.
Математическим маятником называют материальную точку (тело небольших размеров), подвешенную на тонкой невесомой нерастяжимой нити или на невесомом стержне.
Рис. \(1\). Силы, действующие на материальную точку в положении равновесия и при отклонении от положения равновесия
В положении равновесия сила тяжести и сила упругости нити уравновешивают друг друга, и материальная точка находится в покое.
При отклонении материальной точки от положения равновесия на малый угол α на тело будет действовать возвращающая сила \(F\), которая является тангенциальной составляющей силы тяжести:
Эта сила сообщает материальной точке тангенциальное ускорение, направленное по касательной к траектории, и материальная точка начинает двигаться к положению равновесия с возрастающей скоростью. По мере приближения к положению равновесия возвращающая сила, а следовательно, и тангенциальное ускорение точки уменьшаются. В момент прохождения положения равновесия угол отклонения α \(=0\), тангенциальное ускорение также равно нулю, а скорость материальной точки максимальна.
Далее материальная точка проходит по инерции положение равновесия и, двигаясь далее, сбавляет скорость. В крайнем положении материальная точка останавливается и затем начинает двигаться в обратном направлении.
Период малых собственных колебаний математического маятника длины \(l\), неподвижно подвешенного в однородном поле тяжести с ускорением свободного падения \(g\), равен
Наиболее известным практическим использованием маятника является применение его в часах для измерения времени. Впервые это сделал голландский физик X. Гюйгенс.
Поскольку период колебаний маятника зависит от ускорения свободного падения \(g\), то часы, которые идут верно в Москве, будут идти вперёд в Санкт-Петербурге. Чтобы эти часы шли верно в Санкт-Петербурге, приведённую длину их маятника нужно увеличить.
В геологии маятник применяют для опытного определения числового значения ускорения свободного падения \(g\) в разных точках земной поверхности. Для этого по достаточно большому числу колебаний маятника в том месте, где измеряют \(g\), находят период его колебаний, а затем вычисляют ускорение свободного падения, выразив его из формулы периода маятника.
Заметное отклонение величины \(g\) от нормы для какой-либо местности называют гравитационной аномалией.
Опыт показывает, что качающийся маятник сохраняет плоскость, в которой происходят его колебания. Это означает, что если привести в движение маятник, установленный на диске центробежной машины, а диск заставить вращаться, то плоскость качания маятника относительно комнаты изменяться не будет. Это позволяет с помощью опыта обнаружить вращение Земли вокруг своей оси.
В \(1850\) г. Ж. Фуко подвесил маятник под куполом высокого здания так, что острие маятника при качании оставляло след на песке, насыпанном на полу. Оказалось, что при каждом качании острие оставляет на песке новый след. Таким образом, опыт Фуко показал, что Земля вращается вокруг своей оси. В условиях вращения Земли при достаточно большой нити подвеса плоскость, в которой маятник совершает колебания, медленно поворачивается относительно земной поверхности в сторону, противоположную направлению вращения Земли.
При исследовании гармонических колебаний твердого тела, которое не моделируют в виде материальной точки, рассматривают физический маятник .
Рис. 1. Силы, действующие на материальную точку в положении равновесия и при отклонении от положения равновесия. . © ЯКласс.
- Ма́ятник — система, подвешенная в поле тяжести и совершающая механические колебания. Колебания совершаются под действием силы тяжести, силы упругости и силы трения. Во многих случаях трением можно пренебречь, а от сил упругости (либо сил тяжести) абстрагироваться, заменив их связями.
Во время колебаний маятника происходят постоянные превращения энергии из одного вида в другой. Кинетическая энергия маятника превращается в потенциальную энергию (гравитационную, упругую) и обратно. Кроме того, постепенно происходит диссипация кинетической энергии в тепловую за счёт сил трения.
Одним из простейших маятников является шарик, подвешенный на нити. Идеализацией этого случая является математический маятник — механическая система, состоящая из материальной точки, подвешенной на невесомой нерастяжимой нити или на невесомом стержне в поле тяжести.
Если размерами массивного тела пренебречь нельзя, но всё ещё можно не учитывать упругих колебаний тела, то можно прийти к понятию физического маятника. Физический маятник — твёрдое тело, совершающее колебания в поле каких-либо сил относительно точки, не являющейся центром масс этого тела, или неподвижной горизонтальной оси, не проходящей через центр масс этого тела.
Система из нескольких шариков, подвешенных на нитях в одной плоскости, колеблющихся в этой плоскости и соударяющихся друг с другом, называется маятником Ньютона. Здесь уже приходится учитывать упругие процессы.
Маятник Фуко — это груз, подвешенный на нити, способный изменять плоскость своих колебаний.
Ещё одним простейшим маятником является пружинный маятник. Пружинный маятник — это груз, подвешенный на пружине и способный колебаться вдоль вертикальной оси.
Крутильный маятник — механическая система, представляющая собой тело, подвешенное в поле тяжести на тонкой нити и обладающее лишь одной степенью свободы: вращением вокруг оси, задаваемой неподвижной нитью.
Маятник Капицы — пример динамически стабилизированного перевернутого маятника.
Маятники используются в различных приборах, например, в часах и сейсмографах.
Связанные понятия
Враща́тельное движе́ние — вид механического движения. При вращательном движении материальная точка описывает окружность. При вращательном движении абсолютно твёрдого тела все его точки описывают окружности, расположенные в параллельных плоскостях. Центры всех окружностей лежат при этом на одной прямой, перпендикулярной к плоскостям окружностей и называемой осью вращения. Ось вращения может располагаться внутри тела и за его пределами. Ось вращения в данной системе отсчёта может быть как подвижной.
Поступа́тельное движе́ние — механическое движение системы точек (абсолютно твёрдого тела), при котором отрезок прямой, связывающий две любые точки этого тела, форма и размеры которого во время движения не меняются, остаётся параллельным своему положению в любой предыдущий момент времени. При поступательном движении все точки тела описывают одну и ту же траекторию (с точностью до постоянного смещения в пространстве) и в любой данный момент времени имеют одинаковые по направлению и абсолютной величине.
Углова́я ско́рость — величина, характеризующая скорость вращения материальной точки вокруг центра вращения. Для вращения в двухмерном пространстве угловая скорость выражается числом, в трёхмерном пространстве представляется псевдовектором (аксиальным вектором), а в общем случае — кососимметрическим тензором.
Моме́нт ине́рции — скалярная физическая величина, мера инертности во вращательном движении вокруг оси, подобно тому, как масса тела является мерой его инертности в поступательном движении. Характеризуется распределением масс в теле: момент инерции равен сумме произведений элементарных масс на квадрат их расстояний до базового множества (точки, прямой или плоскости).
Простейшие механизмы — устройства, служащие для преобразования направления и величины (модуля) силы. Представляют собой элементы более сложных механизмов. Некоторые из простейших механизмов появились в глубокой древности.
Упоминания в литературе
2) дебаланс с электродвигателем установлен на маятнике специальной конструкции. В свою очередь маятник соединен с корпусом шарнирно и поджат с обеих сторон пружинами. В данном варианте дебаланс одночастотный, но он характеризуется определенным законом изменения возмущающей силы. Вертикальная составляющая силы изменяется по закону Fn = Fn sin ω t sin ?, где Fn – сила инерции, развиваемая дебалансом, ω – угловая скорость составного звена, t – время, ? – угол отклонения маятника от вертикальной линии;
Связанные понятия (продолжение)
Враще́ние — круговое движение объекта. В плоскости объект вращается вокруг центра (или точки) вращения. В трёхмерном пространстве объект вращается вокруг линии, называемой осью. Если ось вращения расположена внутри тела, то говорят, что тело вращается само по себе или обладает спином, который имеет относительную скорость и может иметь момент импульса. Круговое движение относительно внешней точки, например, вращение Земли вокруг Солнца, называется орбитальным движением или, более точно, орбитальным.
Наклонная плоскость — это плоская поверхность, установленная под углом к горизонтали. Наклонная плоскость является одним из простых механизмов. Она позволяет поднимать груз вверх, прикладывая к нему усилие, заметно меньшее, чем сила тяжести, действующая на этот груз.
Центробе́жная си́ла — составляющая фиктивных сил инерции, которую вводят при переходе из инерциальной системы отсчёта в соответствующим образом вращающуюся неинерциальную. Это позволяет в полученной неинерциальной системе отсчёта продолжать применять законы Ньютона для расчёта ускорения тел через баланс сил.
Колеба́ния — повторяющийся в той или иной степени во времени процесс изменения состояний системы около точки равновесия. Например, при колебаниях маятника повторяются отклонения его в ту и другую сторону от вертикального положения; при колебаниях в электрическом колебательном контуре повторяются величина и направление тока, текущего через катушку.
Абсолю́тно твёрдое те́ло — второй опорный объект механики наряду с материальной точкой. Механика абсолютно твёрдого тела полностью сводима к механике материальных точек (с наложенными связями), но имеет собственное содержание (полезные понятия и соотношения, которые могут быть сформулированы в рамках модели абсолютно твёрдого тела), представляющее большой теоретический и практический интерес.
Механи́ческое равнове́сие — состояние механической системы, при котором сумма всех сил, действующих на каждую её частицу, равна нулю и сумма моментов всех сил, приложенных к телу относительно любой произвольно взятой оси вращения, также равна нулю.
Ине́рция (от лат. inertia — бездеятельность, синоним: инертность) — свойство тела оставаться в некоторых системах отсчёта в состоянии покоя или равномерного прямолинейного движения в отсутствие внешних воздействий, а также препятствовать изменению своей скорости (как по модулю, так и по направлению) при наличии внешних сил.
Си́ла упру́гости — сила, возникающая в теле в результате его деформации и стремящаяся вернуть его в исходное (начальное) состояние.
Тела вращения — объёмные тела, возникающие при вращении плоской геометрической фигуры, ограниченной кривой, вокруг оси, лежащей в той же плоскости.
Механи́ческим движе́нием тела называется изменение его положения в пространстве относительно других тел с течением времени. При этом тела взаимодействуют по законам механики.
Физи́ческий ма́ятник — осциллятор, представляющий собой твёрдое тело, совершающее колебания в поле каких-либо сил относительно точки, не являющейся центром масс этого тела, или неподвижной оси, перпендикулярной направлению действия сил и не проходящей через центр масс этого тела.
Тре́ние — процесс механического взаимодействия соприкасающихся тел при их относительном смещении в плоскости касания (внешнее трение) либо при относительном смещении параллельных слоёв жидкости, газа или деформируемого твёрдого тела (внутреннее трение, или вязкость). Далее в этой статье под трением понимается лишь внешнее трение. Изучением процессов трения занимается раздел физики, который называется механикой фрикционного взаимодействия, или трибологией.
Часы Шорта со свободным маятником — точные электромеханические маятниковые астрономические часы, изобретённые в 1921 году английским железнодорожным инженером Уильямом Гамильтоном Шортом (William Hamilton Shortt) при участии известного часовщика Фрэнка Хоупа-Джонса (Frank Hope-Jones) и производимые компанией Synchronome в Лондоне. До изобретения в 1954 году советским инженером Ф. М. Федченко часов АЧФ, они были наиболее точными маятниковыми часами в мире. С момента создания и до конца 1940-х годов.
Храпово́й механи́зм (храпови́к) — зубчатый механизм прерывистого движения, предназначенный для преобразования возвратно-вращательного движения в прерывистое вращательное движение в одном направлении. Проще говоря, храповик позволяет оси вращаться в одном направлении и не позволяет вращаться в другом. Храповые механизмы используются достаточно широко — например, в турникетах, гаечных ключах, заводных механизмах, домкратах, лебёдках, замках наручников и т. д.
Центр масс, центр ине́рции, барице́нтр (от др.-греч. βαρύς — тяжёлый + κέντρον — центр) — (в механике) - геометрическая точка, характеризующая движение тела или системы частиц как целого. В общем случае центр масс не совпадает с центром тяжести, совпадение происходит только у систем материальных точек и тел с однородной по объёму плотностью в однородном гравитационном поле.
Упругая деформация — деформация, исчезающая после прекращения действий на тело внешних сил. При этом тело принимает первоначальные размеры и форму.
Винт (шнек) — простейший механизм. Резьба винта, в сущности, представляет собой другой простейший механизм — наклонную плоскость, многократно обёрнутую вокруг цилиндра.
Тре́ние каче́ния — сопротивление движению, возникающее при перекатывании тел друг по другу т.е. сопротивление качению одного тела (катка) по поверхности другого. Причина трения качения — деформация катка и опорной поверхности, а также силы адгезии. Контактное напряжение в пятне приводит к упругому и/или пластическому деформированию тел, что влечёт микропроскальзывание поверхностей, пластическое течение в пятне контакта и вязкоупругий гистерезис. Как и адгезивное взаимодействие, все эти процессы термодинамически.
У́гол — геометрическая фигура, образованная двумя лучами (сторонами угла), выходящими из одной точки (которая называется вершиной угла).
Кинема́тика (греч. κινειν — двигаться) в физике — раздел механики, изучающий математическое описание (средствами геометрии, алгебры, математического анализа…) движения идеализированных тел (материальная точка, абсолютно твердое тело, идеальная жидкость), без рассмотрения причин движения (массы, сил и т. д.). Исходные понятия кинематики — пространство и время. Например, если тело движется по окружности, то кинематика предсказывает необходимость существования центростремительного ускорения без уточнения.
Электро́метр — прибор, служащий для измерения электрического потенциала. Приборы этого рода могут служить для любой цели: менее точные - электроскоп, обнаруживают присутствие заряда на теле и дают возможность судить о гонке потенциале тела весьма грубо; более точные электрометры позволяют определить потенциал в принятых единицах.
В физике, при рассмотрении нескольких систем отсчёта (СО), возникает понятие сложного движения — когда материальная точка движется относительно какой-либо системы отсчёта, а та, в свою очередь, движется относительно другой системы отсчёта. При этом возникает вопрос о связи движений точки в этих двух системах отсчета (далее СО).
Пра́вило буравчика (пра́вило винта́) — варианты мнемонического правила для определения направления векторного произведения и тесно связанного с этим выбора правого базиса в трёхмерном пространстве, соглашения о положительной ориентации базиса в нём, и соответственно — знака любого аксиального вектора, определяемого через ориентацию базиса.
Идеа́льная жи́дкость — в гидродинамике — воображаемая жидкость (сжимаемая или несжимаемая), в которой отсутствуют вязкость и теплопроводность. Так как в ней отсутствует внутреннее трение, то нет касательных напряжений между двумя соседними слоями жидкости.
Силовая линия, или интегральная кривая, — это кривая, касательная к которой в любой точке совпадает по направлению с вектором, являющимся элементом векторного поля в этой же точке. Применяется для визуализации векторных полей, которые сложно наглядно изобразить каким-либо другим образом. Иногда (не всегда) на этих кривых ставятся стрелочки, показывающие направление вектора вдоль кривой. Для обозначения векторов физического поля, образующих силовые линии, обычно используется термин «напряжённость.
Секундный маятник — маятник, период колебаний которого составляет точно 2 секунды; одна секунда для отклонения от одного крайнего положения до другого и одна секунда для возвращения обратно (частота колебаний 1/2 Гц). Груз маятника подвешен на оси так, что он может свободно качаться. Колебания маятника совершаются под действием силы тяжести, силы упругости и силы трения. Во многих случаях силой трения можно пренебречь, а от сил упругости (либо сил тяжести) абстрагироваться, заменив их связями. После.
Растяжение-сжатие в сопротивлении материалов — вид продольной деформации стержня или бруса, возникающий в том случае, если нагрузка к нему прикладывается по его продольной оси (равнодействующая сил, воздействующих на него, нормальна поперечному сечению стержня и проходит через его центр масс).
Электромагни́тная инду́кция — явление возникновения электрического тока, электрического поля или электрической поляризации при изменении во времени магнитного поля или при движении материальной среды в магнитном поле. Электромагнитная индукция была открыта Майклом Фарадеем 29 августа 1831 года. Он обнаружил, что электродвижущая сила (ЭДС), возникающая в замкнутом проводящем контуре, пропорциональна скорости изменения магнитного потока через поверхность, ограниченную этим контуром. Величина электродвижущей.
Инклинометр (от лат. inclino — наклоняю и …метр) — прибор, предназначенный для измерения угла наклона различных объектов относительно гравитационного поля Земли. Помимо собственно величины угла наклона, может измеряться его направление — азимут.
Солено́ид (от греч. σολήνα (солина) — канал, труба и ειδός (эйдос) — подобный, похожий) — разновидность катушки индуктивности.
Механи́ческие часы́ — часы, использующие маятник, который периодом колебаний измеряет время в течение суток, месяца, года и который приводится в движение гиревым, пружинным или электрическим источником энергии с электромеханическим преобразователем. В качестве меры времени используются инерционные свойства колебательной системы в виде классического и пружинного маятника, при регулировании длинного маятника или спиральной пружины в виде балансового регулятора (+/-).
Гармонические колебания — колебания, при которых физическая величина изменяется с течением времени по гармоническому (синусоидальному, косинусоидальному) закону.
Круговое движение является ускоренным, даже если происходит с постоянной угловой скоростью, потому что вектор скорости объекта постоянно меняет направление. Такое изменение направления скорости вызывает ускорение движущегося объекта центростремительной силой, которая толкает движущийся объект по направлению к центру круговой орбиты. Без этого ускорения объект будет двигаться прямолинейно в соответствии с законами Ньютона.
Пружина — упругий элемент, предназначенный для накапливания или поглощения механической энергии. Пружина может быть изготовлена из любого материала, имеющего достаточно высокие прочностные и упругие свойства (сталь, пластмасса, дерево, фанера, даже картон).
Момент силы (синонимы: крутящий момент, вращательный момент, вертящий момент, вращающий момент) — векторная физическая величина, равная векторному произведению вектора силы и радиус-вектора, проведённого от оси вращения к точке приложения этой силы. Характеризует вращательное действие силы на твёрдое тело.
Углы Эйлера — углы, описывающие поворот абсолютно твердого тела в трёхмерном евклидовом пространстве.
Си́ла — физическая векторная величина, являющаяся мерой воздействия на данное тело со стороны других тел или полей. Приложение силы обусловливает изменение скорости тела или появление деформаций и механических напряжений.
Но́ниус (шкала́-но́ниус, шкала́ Но́ниуса, вернье́р) — вспомогательная шкала, устанавливаемая на различных измерительных приборах и инструментах, служащая для более точного определения количества долей делений основной шкалы.
Пло́тность во́здуха — масса газа атмосферы Земли на единицу объема или удельная масса воздуха при естественных условиях. Плотность воздуха является функцией от давления, температуры и влажности. Обычно, стандартной величиной плотности воздуха на уровне моря в соответствии с Международной стандартной атмосферой принимается значение 1,2250 кг/м³, которая соответствует плотности сухого воздуха при 15 °С и давлении 101330 Па.
Лоренцево сокращение, Фицджеральдово сокращение, также называемое релятивистское сокращение длины движущегося тела или масштаба — предсказываемый релятивистской кинематикой эффект, заключающийся в том, что с точки зрения наблюдателя, движущиеся относительно него предметы имеют меньшую длину (линейные размеры в направлении движения), чем их собственная длина. Множитель, выражающий кажущееся сжатие размеров, тем сильнее отличается от 1, чем больше скорость движения предмета.
Электронное учебное пособие по разделу курса физики Механика
Механика – это раздел физики, который изучает наиболее простой вид движения материи – механическое движение и причины, вызывающие или изменяющие это движение.
Механика состоит из трех разделов: кинематики, динамики и статики. Кинематика дает математическое описание движения, не касаясь причин, которыми вызвано движение. Динамика – основной раздел механики, она изучает законы движения тел и причины, которыми вывзывается движение и его изменение. Статика изучает законы равновесия системы тел под действием приложенных сил. Мы ограничимся изучением двух основных разделов – кинематики и динамики.
Введение
Механика – это раздел физики, который изучает наиболее простой вид движения материи – механическое движение и причины, вызывающие или изменяющие это движение.
Механическое движение – это изменение во времени взаимного расположения тел или частей одного и того же тела. Причиной, вызывающей механическое движение тела или его изменение, является воздействие со стороны других тел.
Развитие механики началось еще в древние времена, однако, как наука она формировалась в средние века. Основные законы механики установлены итальянским физиком и астрономом Г. Галилеем (1564-1642) и английским ученым И. Ньютоном (1643-1727).
Механику Галилея-Ньютона принято называть классической механикой. В ней изучается движение макроскопических тел, скорости которых значительно меньше скорости света с в вакууме. Законы движения тел со скоростями, близкими к скорости света сформулированы А. Эйнштейном (1879-1955), они отличаются от законов классической механики. Теория Эйнштейна называется специальной теорией относительности и лежит в основе релятивистской механики. Законы классической механики неприемлемы к описанию движения микроскопических тел (элементарных частиц – электронов, протонов, нейтронов, атомных ядер, самих атомов и т.д.) их движение описывается законами квантовой механики.
Механика состоит из трех разделов: кинематики, динамики и статики. Кинематика дает математическое описание движения, не касаясь причин, которыми вызвано движение. Динамика – основной раздел механики, она изучает законы движения тел и причины, которыми вывзывается движение и его изменение. Статика изучает законы равновесия системы тел под действием приложенных сил. Мы ограничимся изучением двух основных разделов – кинематики и динамики.
В механике для описания движения в зависимости от условий решаемой задачи пользуются различными упрощающими моделями: материальная точка, абсолютно твердое тело, абсолютно упругое тело, абсолютно неупругое тело, и т.д. Выбор той или иной модели диктуется необходимостью учесть в задаче все существенные особенности реального движения и отбросить несущественные, усложняющие решение.
Материальная точка – это тело обладающее массой, размеры и форма которого несущественны в данной задаче. Любое твердое тело или систему тел можно рассматривать как систему материальных точек. Для этого любое тело или тела системы нужно мысленно разбить на большое число частей так, чтобы размеры каждой части были пренебрежимо малы по сравнению с размерами самих тел.
Абсолютно твердое тело – это тело, расстояние между любыми точками которого остается неизменным в процессе движения или взаимодействия. Эта модель пригодна, когда можно пренебречь деформацией тел в процессе движения.
Абсолютно упругое и абсолютно неупругое тело – это два предельных случая реальных тел, деформациями которых можно и нельзя пренебречь в изучаемых процессах.
Любое движение рассматривается в пространстве и времени. В пространстве определяется местоположение тела, во времени происходит смена местоположений или состояний тела в пространстве, время выражает длительность состояния движения или процесса. Пространство и время –это два фундаментальных понятия, без которых теряется смысл понятия движения: движения не может быть вне времени и пространства.
Пружинный маятник - колебательная система, которая состоит из тела, подвешенного к пружине. Эта система способна к совершению свободных колебаний.
Подобные системы довольно широко распространены за счет своей функциональной гибкости. Механизмы на основе таких маятников часто используются как элементы средств автоматики.
В том числе они нашли применение в контактных взрывателях различных боеприпасов, в качестве акселерометров в контурах управления ракет. Так же они активно используются в предохранительных клапанах, устанавливаемых в трубопроводах.
Что такое пружинный маятник
Пружинным маятником в физике называют систему, совершающую колебательные движения под действием силы упругости.
Приняты следующие обозначения:
k - коэффициент жесткости пружины.
Общий вид маятника:
Особенностями пружинных маятников являются:
Сочетание тела и пружины. Массой пружины обычно в расчетах пренебрегают. Роль тела могут играть различные объекты. На них оказывают действие внешние силы. Груз может крепиться разными способами. Витки пружины, которыми она начинается и заканчивается, изготавливают с учетом повышенной нагрузки;
У любой пружины есть исходное положение, предел сжатия и растяжения. При максимальном сжатии зазора между витками нет. Когда она максимально растянута, возникает необратимая деформация;
Полная механическая энергия появляется с началом процесса обратимого деформирования. В этот момент на объект не оказывает действие сила упругости;
Колебательные движения происходят под влиянием силы упругости. Масштаб влияния определяется несколькими причинами (тип сплава, расположение витков и т. д.). Так как может происходить и сжатие и растяжение, можно сделать вывод, что сила упругости действует в двух противоположных направлениях;
От массы тела, величины и направления прикладываемой силы зависит скорость в плоскости его перемещения. Например, если подвесить груз к пружине и, растянув её, отпустить, то груз будет перемещаться в двух плоскостях: вертикально и горизонтально.
Виды пружинных маятников
Существует два типа данной системы:
Вертикальный маятник - на тело довольно сильно влияет сила тяжести. Это влияние обуславливает увеличение инерционных движений, которые совершает тело в исходной точке.
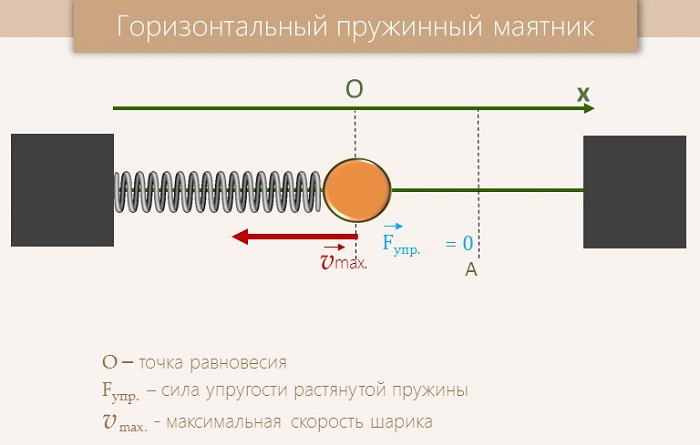
Горизонтальный - в таком варианте при движении на груз начинает действовать сила трения, возникающая по причине того, что груз лежит на поверхности.

Сила упругости в пружинном маятнике
До начала деформирования пружина находится в равновесном состоянии. Прикладываемое усилие может как растягивать, так и сжимать её.
Применяя к пружинному маятнику закон сохранения энергии, мы можем рассчитать силу упругости в нем. Упругость прямо пропорциональна расстоянию, на которое сместился груз.
Расчёт силы упругости может быть проведен таким образом:
Fупр = - k*x
где k — коэффициент жесткости пружины (Н\м),
Уравнения колебаний пружинного маятника
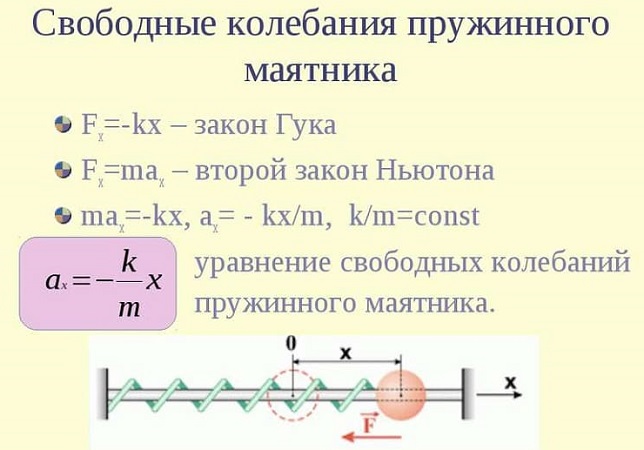
Свободные колебания пружинного маятника описываются с помощью гармонического закона.
Если допустить вероятность того, что колебания идут вдоль оси Х, и при этом выполняется закон Гука, то уравнение примет вид:
F(t) = ma(t) = - mw2x(t),
где w - радиальная частота гармонического колебания.
Для проведения расчета колебаний, учитывая все вероятности, применяют следующие формулы:
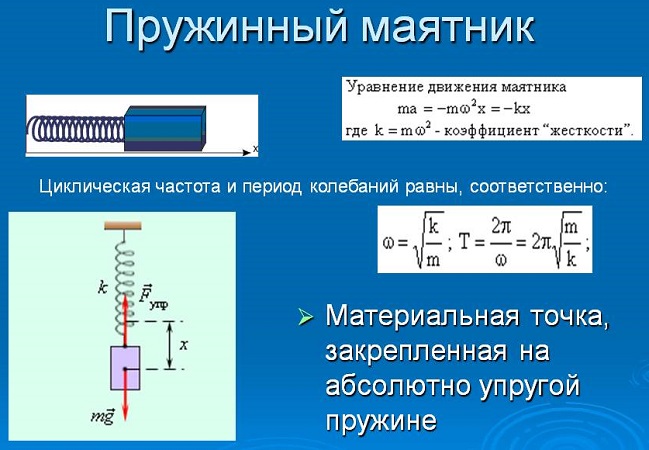
Период и частота свободных колебаний пружинного маятника
При разработке проектов всегда определяется период колебаний и их частота. Для их измерения используются известные в физике формулы.

Изменение циклической частоты покажет формула, приведенная на рисунке:
Факторы, от которых зависит частота:
Коэффициент упругости. На этот коэффициент влияет количество витков, их диаметр, расстояние между ними, длина пружины, жесткость используемого сплава и т. д.
Масса груза. От этого фактора зависит возникающая инерция и скорость перемещения.
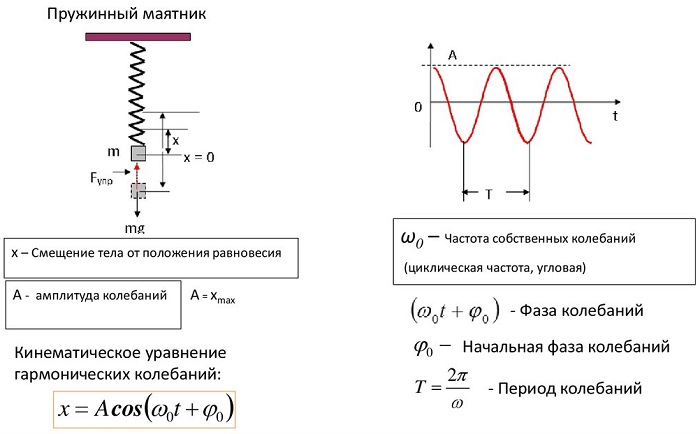
Амплитуда и начальная фаза пружинного маятника
Учитывая начальные условия и рассчитав уравнение колебаний, можем точно описать колебания пружинного маятника.
В качестве начальных условий используются: амплитуда (А) и начальная фаза колебаний (ϕ).
Энергия пружинного маятника
При рассмотрении колебания тел учитывают, что груз движется прямолинейно. Полная механическая энергия тела в каждой точке траектории является константой и равняется сумме его потенциальной энергии и кинетической энергии.
Потенциальная энергия:
Кинетическая энергия:
Полная энергия:

Расчет имеет особенности. При его проведении нужно учитывать несколько условий:
Колебания проходят в двух плоскостях: вертикальной и горизонтальной.
В качестве равновесного положения выбирается ноль потенциальной энергии. Находясь в этом положении пружина сохраняет свою форму.
Влияние силы трения при расчете не учитывают.
Дифференциальное уравнение гармонических колебаний пружинного маятника
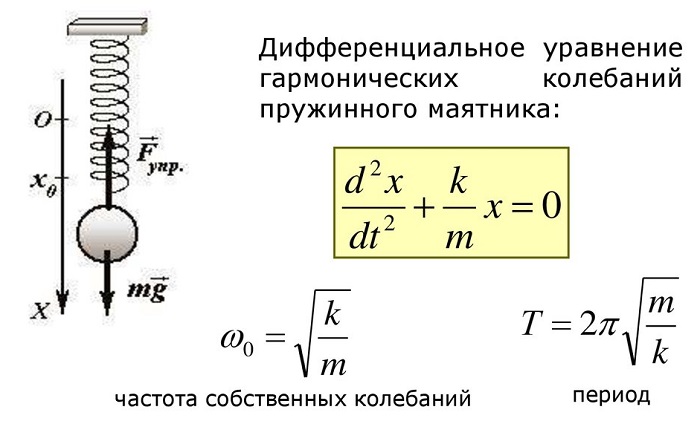
Отметим, что пружинный маятник — это обобщенное определение. Скорость движения груза (тела) напрямую зависит от комплекса условий, в том числе приложенного к нему усилия.
Читайте также:
- Краткое изложение содержания работы составляющее примерно 10 его объема это
- Промышленное развитие страны кратко
- Сценарий на новый год в детском саду старшая группа в современном стиле без деда мороза
- Основные закономерности размещения полезных ископаемых в земной коре кратко
- Функции языка в культуре кратко