
Радиолокация в военном деле доклад
Обновлено: 20.05.2024
Радиолокация с момента своего возникновения, в первую очередь, была нацелена на решение военных задач, но сегодня без ее помощи человек не может обходиться и в своей повседневной жизни – это мобильная связь, авиаперелеты, медицинская диагностика и многое другое. Данное издание может заинтересовать даже тех, кто совсем далек от радиотехники. Пролистаем книгу вместе и расскажем вкратце об основных понятиях, физических основах радиолокации и структуре РЛС.
Первые эксперименты: радиоволны в открытом море
С помощью радиолокации обеспечивается решение широкого круга задач, связанных с обнаружением воздушных и наземных объектов (целей), навигацией (обеспечением вождения) различных судов (воздушных и морских), с управлением воздушным и морским движением, управлением средствами ПВО, с обеспечением безопасности движения транспортных средств, с предсказанием возникновения погодных явлений, а также с поражением наземных (морских) и воздушных объектов в любое время суток и в любых метеоусловиях. Помимо этого, основываясь на принципах радиолокации, решаются задачи, связанные с диагностикой организма человека. Как видите, спектр задач, решаемых радиолокацией, достаточно широк несмотря на то, что радиолокация сравнительно молодое научное направление.
![Самолет_дальнего_радиолокационного_обнаружения_и_управления_А_50У.jpg]()
Самолет дальнего радиолокационного обнаружения и управления А-50У

Как и любое направление развития науки и техники, радиолокация базируется на некоторых физических основах, позволяющих обеспечивать решение стоящих перед ней задач, а именно: обнаруживать различного рода объекты и определять координаты и параметры их движения с помощью радиоволн.
Использование радиоволн, или, другими словами, электромагнитных колебаний (ЭМК), частотный диапазон которых сосредоточен в пределах от 3 кГц до 300 ГГц, определяет основные преимущества радиолокационных систем (РЛС) перед другими системами локации (оптическими, инфракрасными, ультразвуковыми). В первую очередь, это обусловлено тем, что закономерности распространения радиоволн в однородной среде достаточно стабильны как в любое время суток, так и в любое время года и, следовательно, изменение условий оптической видимости, обусловленных появлением дождя, снега, тумана или изменением времени суток, не нарушает работоспособность РЛС.
Основными закономерностями распространения радиоволн, которые позволяют обнаруживать объекты и измерять координаты и параметры их движения, являются следующие:
– постоянство скорости и прямолинейность распространения радиоволн в однородной среде (при проведении инженерных расчетов скорость распространения радиоволн принимают равной 3·10 –8 м/с;
– способность радиоволн отражаться от различных областей пространства, электрические или магнитные параметры которых отличаются от аналогичных параметров среды распространения;
– изменение частоты принимаемого сигнала по отношению к частоте излученного сигнала при относительном движении источника излучения и приемника радиолокационного сигнала.
Последнее свойство радиоволн в радиолокации называют эффектом Доплера по имени австрийского ученого Кристиана Андреаса Доплера, который в 1842 году теоретически обосновал зависимость частоты колебаний, воспринимаемых наблюдателем, от скорости и направления движения источника волны и наблюдателя относительно друг друга.
![радиолокатор АОРЛ-1АС_1.jpg]()
Доплеровский метеорологический радиолокатор

Для проведения процедуры измерения расстояния до цели РЛС излучает в ее направлении зондирующий сигнал. Данный сигнал доходит до объекта, отражается от него и возвращается обратно к РЛС. Поскольку, как отмечалось ранее, скорость распространения радиосигнала в однородной среде постоянная, то для определения дальности до объекта необходимо зафиксировать момент излучения зондирующего сигнала t0 и момент приема отраженного сигнала от цели t1. В результате разность (t1 – t0) позволяет определить время, в течение которого радиоволна проходит путь от РЛС к цели и обратно, которое равно 2Д, где Д – дальность до объекта (расстояние между РЛС и целью). Разность времен (t1 – t0) в радиолокации называют временем запаздывания и обозначают как tд. В результате при известной величине tд можно составить равенство 2Д = Сtд, из которого следует, что дальность до объекта (цели) равна Д = Сtд/2.
Таким образом, подводя итог процедуре измерения дальности до цели, можно констатировать, что для измерения с помощью РЛС расстояния до цели необходимо определить время запаздывания tд, которое при известной скорости распространения радиоволн позволяет определить дальность до нее.
Большой процент объектов радиолокационного наблюдения составляют подвижные или движущиеся цели. К таким целям, например, относятся самолеты, вертолеты, автомобили, люди и т.д. Основным отличительным признаком таких объектов является скорость их движения. Выявить эффект движения цели, как отмечалось ранее, можно, опираясь на эффект Доплера, который позволяет определить радиальную скорость движения цели. То есть частота принимаемых РЛС колебаний от цели, двигающейся ей навстречу, возрастает по сравнению со случаем неподвижной цели и уменьшается при удалении цели от РЛС. Данное изменение частоты принимаемого сигнала называют доплеровским смещением частоты. Величина данного смещения зависит от скорости взаимного движения носителя РЛС и цели. Необходимо заметить, что рассмотренные свойства радиоволн будут проявляться вне зависимости от условий оптической видимости в зоне радиолокационного наблюдения.
Основные классы РЛС
Выполнение частной задачи радиолокационного наблюдения, например обнаружения цели или измерения дальности до нее, осуществляется с помощью одноименных радиолокационных устройств – радиолокационного обнаружителя или радиолокационного измерителя дальности соответственно. Совокупность радиолокационных устройств, предназначенных для решения какой-либо общей задачи, например обеспечения перехвата воздушной цели либо поражения наземной цели и т. п., называется радиолокационной системой (РЛС), или радиолокатором. Техническая реализация такой системы обычно именуется радиолокационной станцией, а в англоязычной литературе – радаром.
Источником информации о цели в радиолокации служит радиолокационный сигнал. В зависимости от способов формирования радиолокационного сигнала различают следующие типы РЛС, или методы радиолокации.
1. Активные РЛС, или активный метод радиолокационного наблюдения. При данном методе с помощью РЛС формируется радиосигнал, который излучается в направлении на цель (зондирующий сигнал). В результате взаимодействия зондирующего сигнала с целью образуется отраженный сигнал, который поступает на вход приемника РЛС и затем обрабатывается в данном устройстве в целях извлечения информации о наблюдаемой цели. Данный метод радиолокационного наблюдения получил наибольшее распространение в современных РЛС. Необходимо заметить, что при использовании активного метода устройство формирования радиосигнала (передатчик) и приемник РЛС находятся в одной точке пространства.
2. Активные РЛС с активным ответом. Как и в предыдущем случае, с помощью РЛС формируется радиосигнал, который излучается в направлении на цель (зондирующий сигнал). Однако радиолокационный сигнал формируется не в результате отражения излучаемых электромагнитных колебаний целью, а за счет переизлучения их с помощью специального устройства, именуемого ответчиком-ретранслятором. Данный метод широко используется в системах определения государственной принадлежности наблюдаемых объектов, управления воздушным движением, а также в радионавигационных системах.
4. Пассивная радиолокация, или пассивный метод радиолокационного наблюдения, основан на приеме собственного радиоизлучения целей. Отличительной особенностью таких систем является наличие в их составе только приемного устройства. Отсутствие необходимости формирования зондирующего колебания делает такие системы высокопомехозащищенными. Данные РЛС широко применяются при пеленгации радиоизлучающих систем противника, например РЛС, входящих в систему управления ПВО противоборствующей стороны.
Таким образом, радиолокационные системы могут быть активными, полуактивными, активными с активным ответом и пассивными. Кроме того, все существующие РЛС можно разделить на следующие основные группы.
В то же время необходимо отметить, что, несмотря на проведенное выше разделение РЛС на классы, существуют специальные РЛС, которые строятся под решение специфических задач и под данное разделение на классы не подпадают. Например, РЛС, решающие задачи диагностики состояния организма человека либо наблюдения объектов, скрытых за преградами, либо наблюдения космических объектов и т.п. Но в целом приведенная классификация позволяет разделить все существующие РЛС по функциональному предназначению.
Состав элементов радиолокационной системы, конечно же, зависит от назначения системы и задач, решение которых возлагается на нее. Тем не менее можно рассмотреть некоторую обобщенную структуру РЛС и рассказать о предназначении элементов такого радиолокатора.
Представим структурную схему гипотетической РЛС, в основу работы которой положен активный метод радиолокации при импульсном режиме излучения, то есть с использованием импульсных зондирующих сигналов в виде чередующихся во времени отрезков колебаний.
На данной структурной схеме можно представить шесть основных элементов типовой РЛС, которые будут иметь место вне зависимости от принципов ее построения, – передатчик (ПРД), приемник (ПРМ), антенная система (АНТ), антенный переключатель (АП), система управления и синхронизации, система обработки.
Передатчик, или передающий тракт РЛС, обеспечивает формирование зондирующего радиосигнала, усиление его до требуемого уровня мощности и передачу в антенную систему. Антенна в импульсном радиолокаторе работает как на передачу, так и на прием. Переключение антенны из режима излучения в режим приема обеспечивается с помощью антенного переключателя, который управляется сигналами системы управления и синхронизации.
Приемник РЛС обеспечивает предварительное преобразование принятого сигнала. Во-первых, осуществляет доведение уровня принятого сигнала до необходимого значения для успешной работы последующих узлов радиолокатора. Во-вторых, осуществляет преобразование (чаще уменьшение) несущей частоты принимаемого сигнала для снижения требований к элементам системы обработки. В-третьих, обеспечивает предварительную селекцию полезного сигнала (сигнала, отраженного от цели) из сигналов помех, которые действуют одновременно с полезным сигналом.
После предварительного преобразования в приемнике сигнал поступает в систему обработки, в которой решаются задачи по выделению из принятого сигнала информации о цели. Система обработки в современных РЛС представляет собой цифровую вычислительную систему, подобную обычному компьютеру или совокупности компьютеров. Поэтому данный элемент РЛС часто еще называют цифровой системой обработки.

Радиолокация - это совокупность научных методов и технических средств, служащих для определения координат и характеристик объекта посредством радиоволн. Исследуемый объект часто именуют радиолокационной целью (или просто целью).
Принцип радиолокации
Радиотехническое оборудование и средства, предназначенные для выполнения задач радиолокации, получили название радиолокационных систем, или устройств (РЛС или РЛУ). Основы радиолокации базируются на следующих физических явлениях и свойствах:
- В среде распространения радиоволны, встречая объекты с иными электрическими свойствами, рассеиваются на них. Волна, отраженная от цели (или ее собственное излучение), позволяет радиолокационным системам обнаружить и идентифицировать цель.
- На больших расстояниях распространение радиоволн принимается прямолинейным, с постоянной скоростью в известной среде. Это допущение делает возможным измерение дальности до цели и ее угловых координат (с определенной ошибкой).
- На основании эффекта Доплера по частоте принятого отраженного сигнала вычисляют радиальную скорость точки излучения относительно РЛУ.
Историческая справка
На способность радиоволн к отражению указывали великий физик Г. Герц и русский электротехник А.С. Попов еще в конце XIX века. Согласно патенту от 1904 года, первый радар создал немецкий инженер К. Хюльмайер. Прибор, названный им телемобилоскопом, использовался на судах, бороздивших Рейн. В связи с развитием авиационной техники применение радиолокации выглядело очень перспективным в качестве элемента противовоздушной обороны. Исследования в этой области велись передовыми специалистами многих стран мира.
В 1932 году основной принцип радиолокации описал в своих работах научный сотрудник ЛЭФИ (Ленинградского электрофизического института) Павел Кондратьевич Ощепков. Им же в сотрудничестве с коллегами Б.К. Шембель и В.В. Цимбалиным летом 1934 года был продемонстрирован опытный образец радиолокационной установки, обнаружившей цель на высоте 150 м при удалении 600 м. Дальнейшие работы по совершенствованию средств радиолокации сводились к увеличению дальности их действия и повышению точности определения местоположения цели.

Виды радиолокации
Природа электромагнитного излучения цели позволяет говорить о нескольких видах радиолокации:
- Пассивная радиолокация исследует собственное излучение (тепловое, электромагнитное и т.п.), которое генерирует цели (ракеты, самолеты, космические объекты).
- Активная с активным ответом осуществляется в случае, если объект оборудован собственным передатчиком и взаимодействие с ним происходит по алгоритму "запрос - ответ".
- Активная с пассивным ответом предполагает исследование вторичного (отраженного) радиосигнала. Радиолокационная станция в этом случае состоит из передатчика и приемника.
- Полуактивная радиолокация - это частный случай активной, в случае когда приемник отраженного излучения расположен вне РЛС (например, является конструктивным элементом самонаводящейся ракеты).
Каждому виду свойственны свои достоинства и недостатки.

Методы и оборудование
Все средства радиолокации по используемому методу разделяют на РЛС непрерывного и импульсного излучения.
Первые содержат в своем составе передатчик и приемник излучения, действующие одновременно и непрерывно. По этому принципу были созданы первые радиолокационные устройства. Примером такой системы могут служить радиоальтиметр (авиационный прибор, определяющий удаление летательного аппарата от поверхности земли) или известный всем автолюбителям радар для определения скоростного режима транспортного средства.
При импульсном методе электромагнитная энергия излучается короткими импульсами в течение нескольких микросекунд. После генерации сигнала станция ведет работу только на прием. После улавливания и регистрации отраженных радиоволн РЛС передает новый импульс и циклы повторяются.
Режимы работы РЛС
Существует два основных режима функционирования радиолокационных станций и устройств. Первый - сканирование пространства. Он осуществляется по строго заданной системе. При последовательном обзоре перемещение луча радара может носить круговой, спиральный, конический, секторный характер. Например, решетка антенны может медленно поворачиваться по кругу (по азимуту), одновременно сканируя по углу места (наклоняясь вверх и вниз). При параллельном сканировании обзор осуществляется пучком радиолокационных лучей. Каждому соответствует свой приемник, ведется обработка сразу нескольких информационных потоков.
Режим слежения подразумевает постоянную направленность антенны на выбранный объект. Для ее поворота, согласно с траекторией движущейся цели, используются специальные автоматизированные следящие системы.
Алгоритм определения дальности и направления
Скорость распространения электромагнитных волн в атмосфере составляет 300 тыс. км/с. Поэтому, зная время, затраченное транслируемым сигналом на преодоление расстояния от станции до цели и обратно, легко вычислить удаленность объекта. Для этого необходимо точно зафиксировать время отправки импульса и момент принятия отраженного сигнала.
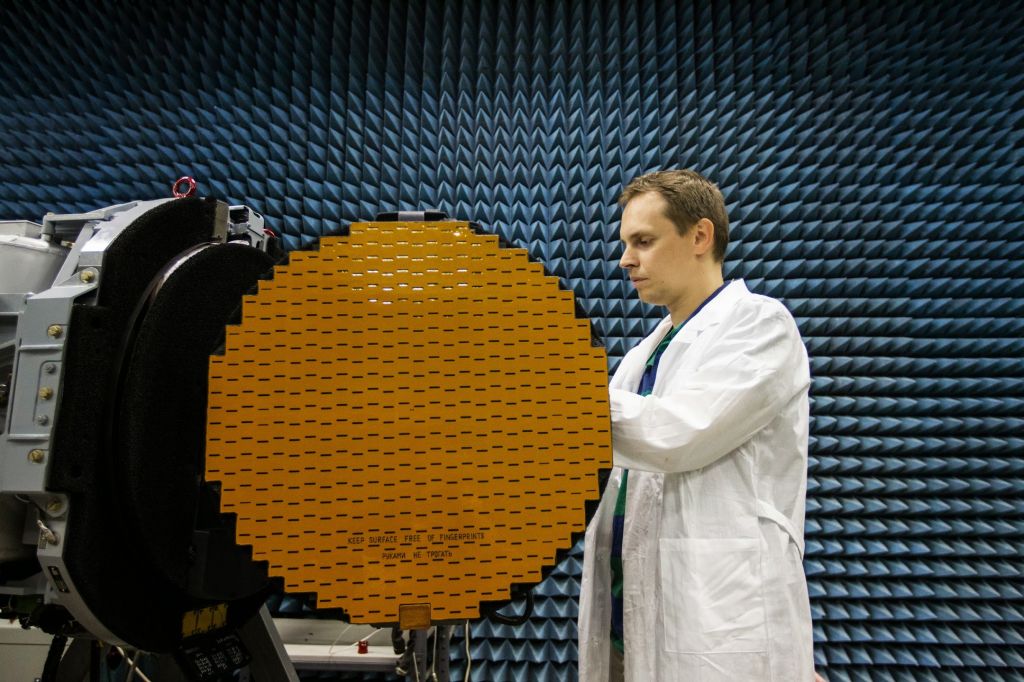
Для получения информации о местонахождении цели используется остронаправленная радиолокация. Определение азимута и элевации (угла места или возвышения) объекта производится антенной с узким лучом. Современные РЛС используют для этого фазированные антенные решетки (ФАР), способные задавать более узкий луч и отличающиеся высокой скоростью вращения. Как правило, процесс сканирования пространства совершается минимум двумя лучами.
Основные параметры систем
От тактических и технических характеристик оборудования во многом зависит эффективность и качество решаемых задач.
К тактическим показателям РЛС причисляют:
- Зону обзора, ограниченную минимальной и максимальной дальностью обнаружения цели, допустимым азимутальным углом и углом возвышения.
- Разрешающую способность по дальности, азимуту, элевации и скорости (возможность определять параметры рядом расположенных целей).
- Точность измерений, которая измеряется наличием грубых, систематических или случайных ошибок.
- Помехозащищенность и надежность.
- Степень автоматизации извлечения и обработки поступающего потока информационных данных.
Заданные тактические характеристики закладываются при проектировании устройств посредством определенных технических параметров, среди которых:
- несущая частота и модуляция генерируемых колебаний;
- диаграммы направленности антенн;
- мощность передающих и принимающих устройств;
- габаритные размеры и масса системы.
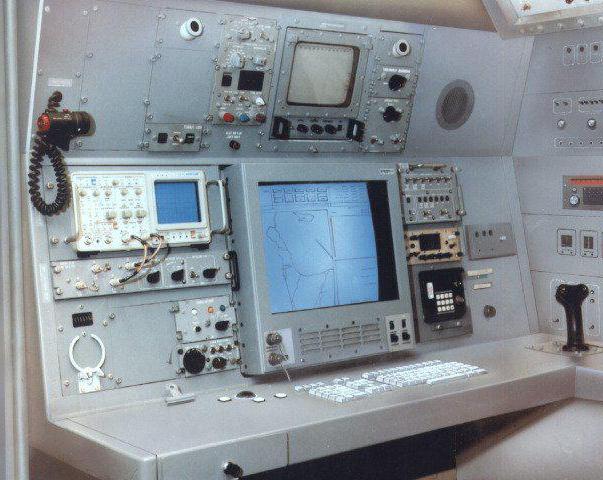
На боевом посту
Радиолокация - это универсальный инструмент, получивший широкое распространение в военной сфере, науке и народном хозяйстве. Области использования неуклонно расширяются благодаря развитию и совершенствованию технических средств и технологий измерений.
Применение радиолокации в военной отрасли позволяет решить важные задачи обзора и контроля пространства, обнаружения воздушных, наземных и водных мобильных целей. Без радаров невозможно представить оборудование, служащее для информационного обеспечения навигационных систем и систем управления орудийным огнем.
Военная радиолокация является базовой составляющей стратегической системы предупреждения о ракетном нападении и комплексной противоракетной обороны.

Радиоастрономия
Посланные с поверхности земли радиоволны также отражаются от объектов в ближнем и дальнем космосе, как и от околоземных целей. Многие космические объекты невозможно было полноценно исследовать лишь с использованием оптических инструментов, и только применение радиолокационных методов в астрономии позволило получить богатую информацию об их природе и структуре. Впервые пассивная радиолокация для исследования Луны была применена американскими и венгерскими астрономами в 1946 году. Примерно в то же время были случайно приняты и радиосигналы из космического пространства.
У современных радиотелескопов приемная антенна имеет форму большой вогнутой сферической чаши (подобно зеркалу оптического рефлектора). Чем больше ее диаметр, тем более слабый сигнал антенна сможет принять. Часто радиотелескопы работают комплексно, объединяя не только устройства, расположенные недалеко друг от друга, но и находящиеся на разных континентах. Среди важнейших задач современной радиоастрономии - изучение пульсаров и галактик с активными ядрами, исследование межзвездной среды.

Гражданское применение
В сельском и лесном хозяйстве радиолокационные устройства незаменимы при получении информации о распределении и плотности растительных массивов, изучении структуры, параметров и видов почв, своевременном обнаружении очагов возгораний. В географии и геологии радиолокация используется для выполнения топографических и геоморфологических работ, определения структуры и состава пород, поиска месторождений полезных ископаемых. В гидрологии и океанографии радиолокационными методами осуществляется контроль состояния главных водных артерий страны, снегового и ледяного покрова, картографирование береговой линии.
Радиолокация - это незаменимый помощник метеорологов. РЛС легко выяснит состояние атмосферы на удалении десятков километров, а по анализу полученных данных составляется прогноз изменения погодных условий в той или иной местности.

Перспективы развития
Для современной радиолокационной станции главным оценочным критерием выступает соотношение эффективности и качества. Под эффективностью понимаются обобщенные тактико-технические характеристики оборудования. Создание совершенной РЛС - сложная инженерная и научно-техническая задача, осуществление которой возможно только с использованием новейших достижений электромеханики и электроники, информатики и вычислительной техники, энергетики.
По прогнозам специалистов, в ближайшем будущем главными функциональными узлами станций самого разного уровня сложности и назначения будут твердотельные активные ФАР (фазированные антенные решетки), преобразующие аналоговые сигналы в цифровые. Развитие вычислительного комплекса позволит полностью автоматизировать управление и основные функции РЛС, предоставив конечному потребителю всесторонний анализ полученной информации.
Сегодня же интерес к ней опять возвратился, в связи поднятием воздушных технологий.
Чтобы разобраться в радиолокации я поставил следующие задачи:
1.Надо было понять, что же такое радиолокация, какая она бывает
2.Что такое радиолокационная станция, их классификация, как она работает
3.Привести примеры радиолокационной станции
4.Где применяют радиолокацию
5.Как научились обходить радиолокацию (технология СТЕЛС)
1. Что такое радиолокация (в дальнейшем РЛ)?
Радиолокация — область науки и техники, объединяющая методы и средства обнаружения, измерения координат, а также определение свойств и характеристик различных объектов, основанных на использовании радиоволн.
Выделяют два вида радиолокации:
Пассивная радиолокация основана на приёме собственного излучения объекта
При активной радиолокации радар излучает свой собственный зондирующий импульс и принимает его, отраженным от цели.
Активная радиолокация бывает двух видов:
С активным ответом — на объекте предполагается наличие ответчика (радиопередатчика), который излучает радиоволны в ответ на принятый сигнал. Активный ответ применяется для опознавания объектов, а также для получения от них дополнительной информации (например, количество топлива, тип объекта и многое другое).
С пассивным ответом — запросный сигнал отражается от объекта и воспринимается в пункте приёма как ответный.
1.1 Принцип действия:
Радиолокация основана на следующих физических явлениях:
Радиоволны рассеиваются, на встретившихся, на пути их распространения: объектов с другими электрическими свойствами, отличными от свойств среды распространения. При этом отражённая волна, так же, как и собственно, излучение цели, позволяет обнаружить цель.
Частота принятого сигнала получает дополнительный сдвиг относительно частоты излучаемых колебаний при перемещении точек приёма и излучения, что позволяет измерять скорость движения цели относительно РЛС.
2. Радиолокационная станция
Радиолокационная станция (РЛС) или радар — система для обнаружения воздушных, морских и наземных объектов, а также для определения их дальности. В основном используется метод, основанный на излучении радиоволн и регистрации их отражений от объектов.
РЛС можно классифицировать так:
РЛС управления и слежения;
РЛС бокового обзора;
По характеру носителя:
По типу действия
По сфере применения:
2.1 Принцип действия РЛС
Система действия действий такова: большая антенна вращается на 360 градусов и посылает радиоволны, между которыми угол равен 1 градус, и дальность действий этих волн 100 км, тем самым, отсекая квадрат 2х2 километра; таких волн антенна посылает и принимает 360х90, так как по окружности 360 и по вертикали 90. Если искомый объект находиться в отсекаемом квадрате, то вычисляется его скорость и примерное местоположение его в определенное время и туда посылается луч, который гораздо тоньше предыдущего и служит для захвата цели, в то время как предыдущий служит для обнаружения цели
2.2 Устройство Первичной РЛС
В основе строения Первичной РЛС лежат: приемник (устройство для приёма электромагнитных волн, с последующим преобразованием содержащейся в них информации к виду, в котором она могла бы быть использована.), антенна (устройство для излучения и приема радиоволн ), передатчик (техническое устройство для передачи сигналов в участке электромагнитных волн с помощью радиоволн).
1. Передающее устройство является источником электромагнитного сигнала высокой мощности. В зависимости от конструкции, передатчик работает либо в импульсном режиме, формируя повторяющиеся короткие мощные электромагнитные импульсы, либо излучает непрерывный электромагнитный сигнал.
2. Антенна выполняет фокусировку сигнала приёмника и формирование диаграммы, а также приём отражённого от цели сигнала и передачу этого сигнала в приёмник. В зависимости от реализации приём отражённого сигнала может осуществляться либо той же самой антенной, либо другой, которая иногда может располагаться на значительном расстоянии от передающего устройства.
3. Приёмное устройство выполняет усиление и обработку принятого сигнала. В самом простом случае результирующий сигнал подаётся на экран, который показывает изображение, синхронизированное с движением антенны.
2.3 Устройство Вторичной РЛС
Принцип действия вторичного радиолокатора несколько отличается, от принципа Первичной радиолокации. В основе устройства Вторичной РЛС лежат компоненты: передатчик, антенна, приёмник, сигнальный процессор (специализированный микропроцессор, предназначенный для цифровой обработки сигналов в реальном масштабе времени) , индикатор и самолётный ответчик с антенной (бортовое приёмопередающее устройство летательных аппаратов, предназначенное для автоматической выдачи информационных посылок по запросному сигналу РЛС.) .
Передатчик . Служит для излучения импульсов запроса в антенну на частоте 1030 МГц
Антенна . Служит для излучения и приёма отражённого сигнала. Для вторичной РЛС характерно то, что антенна излучает на частоте 1030МГц, и принимает на частоте 1090 МГц.
Приёмник . Служит для приёма импульсов на частоте 1090 МГц
Сигнальный процессор . Служит для обработки принятых сигналов
Индикатор. Служит для индикации обработанной информации
Самолётный ответчик с антенной. Служит для передачи импульсного радиосигнала, содержащего дополнительную информацию, обратно в сторону РЛС при получении радиосигнала запроса.
3. Применение РЛ
3.1 Военное применение
Одним из первых важных применений радиолокации были поиск и дальнее обнаружение в военных целях. Обратимся к истории: перед второй мировой войной Великобритания построила не очень совершенную, но довольно эффективную сеть радиолокационных станций дальнего обнаружения для защиты от внезапных воздушных налетов со стороны Ла-Манша. В наши же дни более совершенные радиолокационные сети защищают Россию и Северную Америку от внезапного нападения авиации или ракет. Корабли и самолеты также оснащаются радиолокаторами. Таким образом, стало возможным наведение истребителей на вражеские бомбардировщики с наземных радиолокаторов слежения или с корабельных радиолокаторов перехвата; можно также использовать бортовые самолетные радиолокаторы для обнаружения, слежения и уничтожения техники противника. Бортовые радиолокаторы важны для поиска, осуществляемого над сушей или морем, и оказания помощи в навигации или при слепом бомбометании.
Ракеты с радиолокационным наведением оснащаются для выполнения боевых задач специальными автономными устройствами. Для распознавания местности на самонаводящейся ракете имеется бортовой радиолокатор, который сканирует земную поверхность и соответствующим образом корректирует траекторию полета. Радиолокатор, расположенный поблизости от противоракетной установки, может непрерывно отслеживать полет межконтинентальной ракеты. За последние годы в обычные методы и средства радиолокации было внесено много нового – появилась, в частности, система для одновременного слежения за многими целями, находящимися на разных высотах и азимутах; кроме того, разработан способ усиления сигналов радиолокатора без увеличения фонового шума.
3.2 Невоенные применения.
Океанские суда используют радиолокационные системы для навигации. На промысловых траулерах радиолокатор находит применение для обнаружения косяков рыбы.
На самолетах радиолокаторы используют для решения ряда задач, в том числе для определения высоты полета относительно земли. В аэропортах один радиолокатор служит для управления воздушным движением, а другой – радиолокатор управления заходом на посадку – помогает пилотам посадить самолет в условиях плохой видимости.
4. Технология СТЕЛС и связь ее с РЛ (РЛС).
СТЕЛС - технология снижения заметности. Поверхность самолёта собирают из нескольких тысяч плоских треугольников специального волнотталкивающего материала, следовательно:
Одна из возможных гипотез, почему СТЕЛС не заметен для радара это то, что он отражает волны таким образом, чтобы отражённый сигнал не вернулся в радиолокационную станцию противника, а куда-нибудь в другую точку.
Допустим, что покрытие для внешней отделки СТЕЛС делается из метала, который способен отразить радиоволны. Который крепится на крыле самолета, его нижней части, и нижней части крыла под определенным углом, чтобы радиоволны отражались не в РЛС а, допустим, уходили далеко в небо, или же падали на землю, но не на РЛС.
Технология радиолокации позволила заглянуть в удивительный для нас мир. Здесь есть место сложной и глубокой теории, уникальным экспериментам, удивительным техническим решениям и прикладным применениям.

Благодаря созданной системе, работавшей в тесном взаимодействии с другими видами разведки, англичане получили возможность своевременно обнаруживать самолеты противника, поднимать в воздух истребительную авиацию и приводить в готовность средства зенитной артиллерии. При этом отпала необходимость беспрерывного воздушного патрулирования, вследствие чего истребители-перехватчики использовались с большей эффективностью. Потери гитлеровской авиации резко возросли. Так, лишь 15 сентября 1940 года немцы лишились 185 самолетов из 500, участвовавших в налете. Это заставило их перейти в основном к ночным налетам.
Вместе с тем начался поиск способов и средств, затрудняющих обнаружение самолетов в воздухе радиолокационными средствами противника. Решение этой проблемы было найдено в использовании авиацией пассивных и активных помех средствам радиолокации.

Следующим шагом развития средств борьбы с радиолокацией явилось использование воюющими сторонами активных помех, т. е. специальных электромагнитных излучений, подавляющих приемные устройства РЛС.

Боевой опыт, накопленный в ходе войны войсками ПВО и ВВС, показал, что при ведении радиоэлектронной борьбы наибольший эффект достигается при внезапном, массированном и комплексном использовании средств и способов подавления радиолокации. Характерной в этом плане является организация радиоэлектронной борьбы в ходе высадки англо-американского десанта на побережье Нормандии в 1944 году. Воздействие на радиолокационную систему немцев осуществлялось силами и средствами военно-воздушных, военно-морских, воздушно-десантных и сухопутных войск союзников. Для создания активных помех они использовали около 700 самолетных, корабельных и наземных (автомобильных) передатчиков. За неделю до высадки экспедиционных войск, большинство вскрытых всеми видами разведки немецких РЛС было подвергнуто интенсивной бомбардировке. В ночь перед ее началом группа самолетов с передатчиками помех барражировала вдоль побережья Англии, подавляя немецкие РЛС дальнего обнаружения. Непосредственно перед вторжением по радиолокационным постам были нанесены авиационные и артиллерийские удары, в результате чего свыше 50% РЛС оказалось уничтожено. Одновременно сотни малых кораблей и судов небольшими группами направились к Кале и Булони, буксируя аэростаты с металлизированным покрытием и плавучие уголковые отражатели. Корабельные орудия и ракеты выстреливали в воздух металлизированные ленты. Над идущими судами сбрасывались пассивные отражатели, а группа бомбардировщиков под прикрытием помех имитировала массированный налет на Берлин. Делалось это с целью дезорганизации работы уцелевшей радиолокационной системы наблюдения и введения немецкого командования в заблуждение относительно истинного места высадки союзных войск.
На главном направлении высадки десанта английские бомбардировщики с передатчиками помех производили подавление немецких РЛС и выбрасывали дымовые шашки, чтобы затруднить противнику визуальное наблюдение. Одновременно были нанесены авиационные удары по крупным узлам связи в районе высадки, а десантно-диверсионные группы разрушили многие проводные линии. На 262 судах и кораблях (от десантной баржи до крейсера включительно) и на 105 самолетах были установлены передатчики помех, практически парализовавшие работу немецких РЛС всех типов.
При ведении англо-американскими войсками активных наступательных действий возникла необходимость в использовании радиолокации для организации взаимодействия между наземными войсками и авиацией. Трудность заключалась в том, что радио, ракеты, сигнальные полотнища, трассирующие снаряды и другие средства, с помощью которых осуществлялось взаимодействие в первый период войны, могли обеспечить слаженные действия наземных войск и авиации только при условии хорошей видимости. Технические возможности авиации уже в то время позволяли использовать ее практически в любое время суток и года, в любых условиях погоды, но только при наличии соответствующей навигационной техники.
Первые попытки частичного использования радиолокации для обеспечения непрерывного взаимодействия между наземными войсками и авиацией были предприняты американцами во время операций в Северной Африке. Однако создать систему радиолокационного взаимодействия им удалось лишь к началу вторжения на Европейский континент.
Организационно такая система строилась на использовании группы станций, выполнявших в зависимости от их типа различные функции. В нее входили одна станция дальнего обнаружения МЕW (дальность действия до 320 км), три-четыре станции ближнего обнаружения ТРS-3 (дальность действия до 150 км) и несколько станций наведения самолетов на наземные цели SCR-584 (дальность действия до 160 км). Станция МЕW как оперативный информационный центр обеспечивалась телефонно-телеграфной и УКВ радиосвязью со всеми радиолокационными и визуальными наблюдательными постами, а также со штабом авиации, в функцию которого входило принятие решений по сложившейся воздушной обстановке и руководство авиачастями. Станция SCR-584 выводила самолет непосредственно в район объекта, благодаря чему поиск цели существенно упрощался. Кроме того, каждая РЛС системы имела УКВ радиостанцию для связи с самолетами в воздухе.
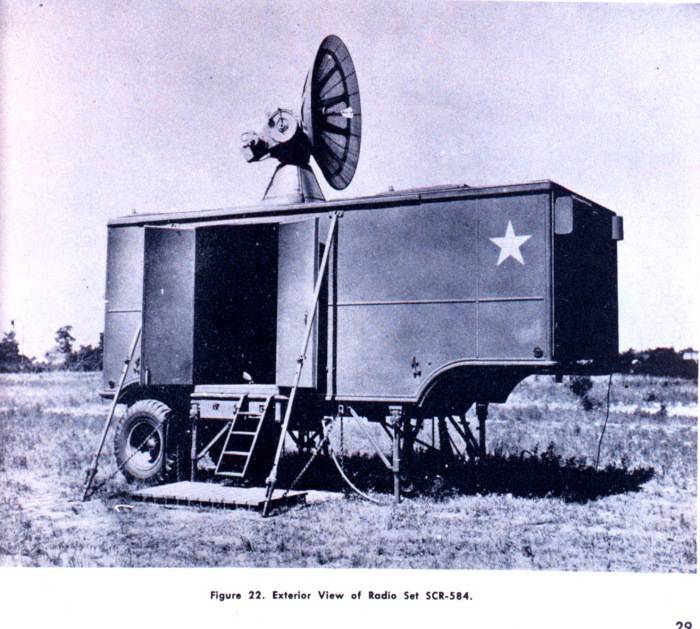
Более сложная задача, чем применение РЛС, для обеспечения взаимодействия между наземными войсками и поддерживающей авиацией, состояла в использовании средств радиолокации для обнаружения наземных целей и стреляющих артиллерийских (минометных) батарей противника. Основная трудность заключалась в самом принципе работы РЛС — отражении излученной электромагнитной энергии от всех встреченных на пути ее распространения объектов. И, тем не менее, американцам удалось приспособить станции орудийной наводки SCR-584 для наблюдения за полем боя. Они включались в общую систему артиллерийского наблюдения и обеспечивали разведку наземных движущихся целей на среднепересеченной местности на глубину до 15-20 км. На долю наземного радиолокационного обнаружения, например, в корпусной артиллерии, приходилось около 10%, в дивизионной — 15-20% от общего числа разведанных целей.
Закрытые артиллерийские и минометные позиции с помощью РЛС впервые были обнаружены в ходе боев на плацдарме в районе Анцио (Италия) в 1943 году. Применение радиолокации для этих целей оказалось более действенным способом, чем звукометрическое и визуальное наблюдение, особенно в условиях интенсивного обстрела и сильнопересеченной местности. Отмечая на индикаторах РЛС траекторию полета снаряда (мины) с нескольких направлений, удавалось определить огневые позиции противника с точностью 5-25 м и организовать контрбатарейную борьбу. Сначала использовались станции SCR-584 и ТРS-3, а затем модифицированный вариант последней — ТРQ-3.
Относительно успешное применение американцами радиолокации для ведения наземной разведки объясняется прежде всего тем, что немцы совершенно не предполагали, что противник использует эти средства для указанных целей. Поэтому они не приняли необходимых мер противодействия, хотя опыт ведения радиоэлектронной борьбы в системе ПВО, в ВВС и ВМС у них имелся.
В развитии отечественной радиолокации создание станций типа РУС-2 по сравнению с РУС-1 явилось значительным шагом вперед, коренным образом повлиявшим на эффективность ПВО. Получая данные о воздушной обстановке (дальность, азимут, скорость полета, групповая или одиночная цель) от нескольких станций, командование зоны (района) ПВО имело возможность оценивать противника и оптимально использовать средства поражения.
К концу 1942 года были созданы два опытных образца станций орудийной наводки под названием СОН-2 и СОН-2а, а в 1943 году началось и их серийное производство. Станции СОН-2 сыграли весьма положительную роль в боевых действиях зенитной артиллерии. Так, по донесениям 1, 3, 4 и 14-го корпусов, 80-й и 90-й дивизий ПВО, при стрельбе с использованием этих станций на каждый сбитый самолет противника было израсходовано снарядов в 8 раз меньше, чем без станций. По простоте устройства и надежности в работе, стоимости производства и условиям транспортировки, а также по времени свертывания и развертывания отечественные РЛС превосходили немецкие, английские и американские, созданные в конце 30-х и начале 40-х годов.

Читайте также: