
Подводные роботы доклад на тему 6 класс
Обновлено: 02.07.2024
История становления и развития подводной робототехники насчитывает более 40 лет. За этот сравнительно небольшой период произошли большие изменения в средствах и методах организации, создания и применения подводных робототехнических систем и их комплексов. Существуют три типа необитаемых пподводных аппаратов (НПА): буксируемые (towed), телеуправляемые привязные (cable controlled, tethered) и автономные (autonomous).
Телеуправляемые привязные НПА (ТНПА) являются, как правило, рабочими аппаратами, предназначенными для подъема затонувших объектов, выполнения разнообразных рабочих действий под водой. Они могут применяться также для обследования объектов и локальных районов дна. ТНПА оснащаются различными исполнительными устройствами в зависимости от характера работ. Наиболее распространенные и универсальные органы – манипуляторы, выполняющие двигательные функции рук человека. Фототелевизионные установки обеспечивают обследование объектов, рельефа дна, документирование ситуаций и контроль работы манипуляторов. Для наведения ТНПА на объект работы используются, как правило, гидроакустические станции. Аппаратам данного типа присущи достаточно высокая маневренность и ограниченный радиус действия. В последующие годы применение оптоволоконных кабелей позволило значительно расширить рабочие функции ТНПА, в особенности при выполнении осмотровых работ и инспекции различных подводных сооружений.
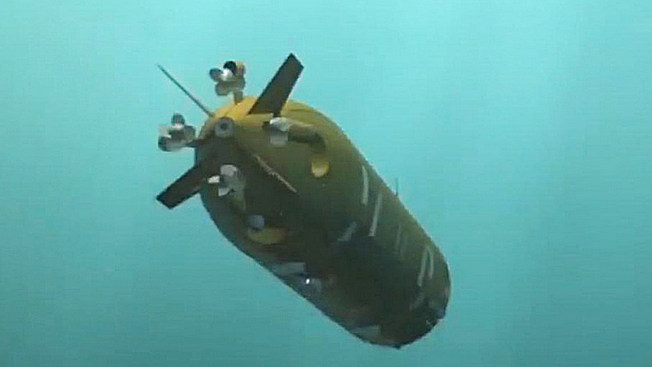
Автономные аппараты вначале использовались в основном для военных целей, в частности, для поиска, опознавания и уничтожения мин, имитации подводных целей, в качестве самонаводящегося оружия, а также для подледных исследований. В дальнейшем АНПА стали использоваться главным образом как информационные роботы, которые могут успешно решать исследовательские задачи по изучению Мирового океана.
Практика создания и применения НПА показывает, что АНПА занимают ведущее место в многоцелевом робототехническом комплексе. Современные АНПА представляют собой новый класс управляемых объектов с присущими им задачами и практическим применением, особенностями технологии и составом систем. При этом системы, входящие в АНПА и судовое оборудование, отличаются большим разнообразием по назначению и физическим принципам их работы, что порождает достаточно жесткие и противоречивые требования к технологии конструирования и внутренней системной организации. Расширение функциональных возможностей АНПА связано также с решением ряда новых теоретических задач. В первую очередь это задачи управления, навигации и связи, ориентирования наности, сбора и накопления информации о среде и, наконец, обеспечения безопасности аппарата в штатных режимах и в особых ситуациях.
Наиболее значительные результаты в последнее время стали возможны благодаря корпоративности и участию в разработках специализированных фирм по оснащению подводных аппаратов системами промышленного изготовления на основе международных стандартов, измерительными приборами и научным оборудованием.
В настоящее время в мировой практике накоплен значительный методологический и практический опыт создания и использования подводных робототехничеких систем для решения научно-исследовательских и прикладных задач в интересах различных отраслей. Прогресс в данной области заключается в создании более совершенных систем, технологий и многофункциональных комплексов, обеспечивающих решение широкого спектра задач в условиях сложной подводной среды. При этом установилась определенная специализация НПА: поисковые буксируемые, рабочие телеуправляемые по кабелю и исследовательские автономные. В связи с этим считается, что комплекс, включающий аппараты этих трех типов, является оптимальным для решения широкого круга задач. Вместе с тем многие специалисты высказывали мнение, что такие аппараты должны быть, как правило, многофункциональными, основанными на модульной технологии, сменном оборудовании и способности к функциональной перестройке.
Использование новых технологий значительно расширило сферу применения АНПА. В настоящее время имеется значительное число проектов и действующих разработок, ориентированных не только на ранее сложившиеся сравнительно доступные применения, но и на выполнение совершенно новых работ по океанографии, обслуживанию различных отраслей и военных программ.
В решении отмеченных выше общих проблем можно отметить тенденцию к сближению функциональных свойств автономных и телеуправляемых подводных роботов и созданию достаточно универсальных информационно взаимодействующих группировок из относительно простых, надежных и эффективных аппаратов. Некоторые из проблем уже решаются на современном уровне их понимания, другие найдут свое разрешение в ближайшее время. Так например создание малых автономных аппаратов с энергоемкими и возобновляемыми источниками питания дает возможность реализовать автоматизированную сеть океанографических измерений и освещения подводной обстановки на обширных просторах Мирового океана. Аналогичные успехи могут быть достигнуты при создании высокоточных интегрированных систем подводной навигации на основе бортовых автономных, гидроакустических и спутниковых технологий. Многие современные автономные аппараты уже имеют в своем составе навигационные комплексы, позволяющие осуществлять коррекцию своего местоположения при выполнении работ, связанных с повышенными требованиями по дальности и точности навигации.
Развитие робототехнического комплекса напрямую зависит от технологической основы, способной реагировать на все возрастающие требования к тактико-техническим и функциональным характеристикам аппаратов и их систем. В этом отношении имеющийся опыт применения модульной технологии, конечно, нельзя приуменьшить, однако и он требует соответствующего анализа и обобщения с учетом мировых тенденций. В связи с этим можно отметить наиболее актуальные проблемы, традиционно связанные с выполнением различного рода продолжающихся и инновационных проектов. К их числу можно отнести:
- внедрение новых системных технологий на основе унифицированных элементов, позволяющих строить различные конфигурации аппаратных и программных средств, производить реконфигурирование структуры в зависимости от задачи и реальных условий работы;
- организацию метрологической экспериментальной базы для разработки, испытаний и опытной эксплуатации образцов создаваемой техники.

Солнечный АНПА (САНПА). Создан на основе совместного проекта с институтом автономных подводных систем (AUSI, США). Проект был направлен на решение проблемы увеличения автономности АНПА путем утилизации энергии солнечного излучения. В 1998 г. в ИПМТ и AUSI впервые в мире были изготовлены два макетных образца САНПА, и затем были проведены их испытания с целью проверки заложенных принципов. На аппарате, разработанном в ИПМТ в течение 1999–2001 г.г. был апробирован ряд системных конфигураций для навигации, управления и энергообеспечения, и на заключительном этапе аппарат успешно прошел методические морские испытания в заливе Петра Великого Японского моря. В последующем системы аппараты были модернизированы, и в современном исполнении аппарат используется для экспериментальных исследований и отработки технологии долговременных автоматизированных работ в океане.
Роботы, автономные и телеуправляемые, предназначенные для работы под водой. Телеуправляемые роботы (ТНПА) или ROV управляются оператором по кабелю, по нему же передается видеопоток, а иногда и питание. AUV или АНПА (автономные необитаемые подводные аппарата) действуют самостоятельно, например, по заранее заложенной программе или повинуясь бортовому ИИ. Собранные данные они передают, как правило, уже после того, как поднимутся на поверхность. Есть также глубоководные подводные роботы, прежде всего, у США и Китая, способные погружаться на глубины до 6000 метров и более.
Основные потребители в России: ВМФ, МЧС, ФСО, ФСБ, нефтяники.
Каталог подводных роботов
Производители подводных роботов
Производители компонентов для подводных роботов
Глоссарий
Области применения подводных роботов
Премущества использования
- снижение риска для людей, прежде всего, водолазов
- могут использоваться вместо другого громоздкого и дорогостоящего оборудования
- существенно расширяют возможности изучения морей, океанов и других водоемов
- более экономичны в применении по-сравнению с использованием водолазов и обитаемой техники
Проблемы пользования
- у спускаемых аппаратов "привязного типа", которые соединены с судном управляющим или силовым кабелем, кабель создает так называемый "водяной парус", препятствующий передвижению аппарата и сужа.щий области его применения.
- винтовые ROV или AUV нередко поднимают со дна ил, который серьезно затрудняет обзор для оператора подводного аппарата
- аппараты нуждаются в ИИ, способном предотвращать их столкновения с другими подвижными или неподвижными объектами под водой.
- AUV как правило располагают небольшим запасом энергии, что ограничивает их применение.
Объем рынка подводной робототехники в России
В 2013 году суммарная выручка Индэл-Партнера и Подводной робототехники составила 39,7 млн рублей от продажи 40 аппаратов. Рентабельность аппаратов может составлять от 15% до 100%. Около 10-15% выручки можно заработать на сервисных услугах.
Чемпионаты в области подводной робототехники
Аквароботех
Российские соревнования. Как правило проходят в формате - для студенческих команд, для разработчиков и для эксплуатантов (силовиков, прежде всего). АНПА, ТНПА, надводные роботы.
International MATE ROV Competition
Международные сорвенования в области подводной робототехники.
Соревнования пройдут 23-25 июня 2017 года в Лонг Бич, Калифорния, США, 60 команд. В этом году тематика миссий - работа в порту и экологические исследования порта.
RoboSub
Неофициальный чемпионат мира в области подводной робототехники. Проходит в Сан-Диего, США. Участвуют сборные 44 технических вузов Индии, Канады, Китая, Пуэрто-Рико, России, Сингапура, США, Таиланда, Японии.
Shell Ocean Discovery XPRIZE
2017. В соревнованиях Shell Ocean Discovery XPRIZE примет участие 21 команда из 13 стран. Первый раунд соревнований намечен на сентябрь 2017 года, второй - годом позднее. Подводные роботы должны будут сформировать так называемую батиметрическую карту - географическую карту, отображающую подводный рельеф при помощи изобат, дополняемых отметками глубин. Обследовать предстоит площадь в 500 кв.км, а также выполнить фотографирование обнаруженных на дне объектов с помощью двух подводных роботов, запускаемых с беспилотного "материнского судна". У KDDI есть опыт использования подводных роботов, поскольку компания занимается прокладкой подводных кабелей связи, тогда как у Mitsui есть экспертиза в области создания надводных необитаемых судов. Первый тур предусматривает 16 часов на картографирование хотя бы 100 кв.км на глубине в 2000 метров. В рамках второго тура требуется составить карту, покрывающую не менее 250 кв.км на глубине 4000 метров за 24 часа.
Побороться есть за что - команда-победитель получит приз в размере $4 млн, а общий призовой фонд достигает $3 млн. В мировом первенстве примут участие компанды из Канады, Китая, Франции, Германии, Ганы, Индии, Японии, новой Зеландии, Португалии, Южной Африки, Швейцарии, Объединенного Королевства и США. А вот Россия, увы, в соревнованиях участия не принимает.
Singapore AUV Challenge (SAUVC)
2016.03.06 Команда ДВФУ заняла второе место в открытом чемпионате Азии с новым автономным аппаратом (выполнили 2 задания из трех). Аппарат был собран в 2015 году и участвовал в Singapore AUV Challenge в 2015 и 2016 годах. Первое место заняла команда Северо-Западного политихнического университета из Китая. Участие принимали команды из Китая, Индии, Сингапура, Малайзии, Таиланда, Бангладеша и Египта.
Если робота снабдить соответствующими манипуляторами, то он запросто сможет что-либо делать под водой — прикручивать и откручивать, отрезать и приваривать, доставлять грузы вниз и поднимать на поверхность. Причем делать это часами — ему не страшны высокие давления, кессонная болезнь и переохлаждение.
Все чаще роботов привлекают для строительства, обследования и ремонта объектов, находящихся под водой. Таких как газо- и нефтепроводы, подводные кабели, нефтевышки, плотины, опоры мостов. Специально созданные аппараты используют в атомной промышленности для проверки и проведения несложных работ в радиоактивных водных резервуарах. И уж, конечно, для визуального обследования причальных сооружений и днищ судов.
Интереснейшей задачей для роботов является обследование и очистка акведуков и систем канализации изнутри, там, куда человек вообще не может добраться. Так, в одном из самых длинных водопроводных туннелей мира, Делавэрском акведуке, появились трещины, через которые ежедневно уходят тысячи кубометров воды. Для ремонта туннеля предусмотрено использовать миниатюрную подводную лодку-робота.
Мозги внутренние, наружные и коллективные
Для осмотра затонувшего корабля иногда достаточно опустить на тросе телекамеру. Если же важно осмотреть затопленный объект изнутри, а глубины не позволяют использовать водолаза, то автономный, свободно перемещающийся робот здесь просто незаменим. Важно только, чтобы робот сам нашел дорогу назад.
Но даже если мощности бортового компьютера недостаточно, робот может найти выход из положения самостоятельно, воспользовавшись… сетью Интернет. С ее помощью робот может использовать для своих целей свободные мощности других компьютеров или просто пользоваться находящимися в сети специальными базами данных.
В бездну за золотом
Несмотря на то, что подводные роботы весьма дорого стоят, они вполне могут окупить себя. По некоторым данным, на дне Океана покоится около трех миллионов (!) затонувших кораблей, большинство из которых вообще не обнаружены. Помимо того, что древние корабли представляют собой чисто археологический интерес, они могут содержать в себе огромные сокровища. Взять хотя бы галеоны испанского серебряного флота.
После 1945-го развитие морских телеуправляемых аппаратов пошло по двум направлениям. В гражданской сфере появились глубоководные батискафы, впоследствии развившиеся до роботизированных исследовательских комплексов. А военные КБ старались создать надводные и подводные аппараты для выполнения целого спектра боевых задач. В итоге в США и России были созданы различные беспилотные надводные аппараты (БНА) и беспилотные подводные аппараты (БПА).
Морские роботы США
В военно-морских силах США необитаемые морские аппараты стали применяться сразу после II Мировой войны. В 1946 году во время испытаний атомных бомб на атолле Бикини ВМС США дистанционно осуществляли сбор проб воды с помощью БНА - радиоуправляемых катеров. В конце 1960-х на БНА устанавливалась аппаратура дистанционного управления для траления мин.
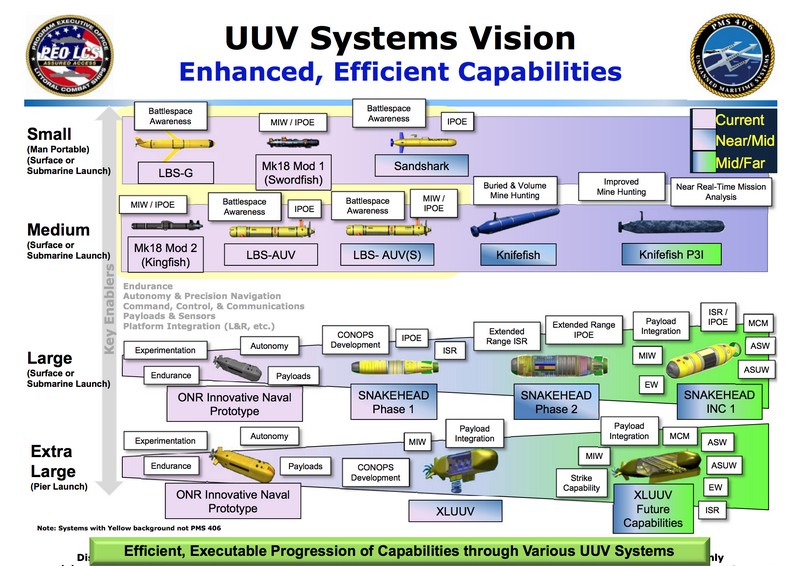
В 1994 году ВМС США опубликовали документ UUV Master Plan (Генеральный план по БПА), который предусматривал использование аппаратов для противоминной борьбы, сбора информации и океанографических задач в интересах флота. В 2004 году был опубликован новый план по подводным беспилотникам. В нем описывались миссии по разведке, противоминной и противолодочной борьбе, океанографии, связи и навигации, патрулированию и охране морских баз.
Сегодня в ВМС США классифицируют БНА и БПА по размерам и особенностям применения. Это позволяет разделить все роботизированные морские аппараты по четырем классам (для удобства сравнения применим эту градацию и для наших морских роботов).
X-Class. Аппараты представляют собой небольшие (до 3 м) БНА или БПА, которые должны обеспечивать действия групп сил спецопераций (ССО). Они могут вести разведку и обеспечивать действия корабельной ударной группировки (КУГ).
Harbor Class. БНА разрабатываются на базе стандартной 7-метровой лодки с жестким каркасом и предназначены для выполнения задач обеспечения морской безопасности, ведения разведки. Кроме того, аппарат может оснащаться различными огневыми средствами в виде боевых модулей. Скорость таких БНА, как правило, превышает 35 узлов, а автономность работы составляет около 12 часов.
Snorkeler Class. Представляет собой семиметровый БПА, предназначенный для противоминной борьбы, противолодочных операций, а также обеспечения действий ССО ВМС. Скорость под водой достигает 15 узлов, автономность - до 24 часов.
Fleet Class. 11-метровый БНА с жестким корпусом. Разработан для противоминной борьбы, противолодочной обороны, а также участия в морских операциях. Скорость аппарата варьируется от 32 до 35 узлов, автономность - до 48 часов.
Теперь рассмотрим БНА и БПА, которые стоят на службе ВМС США или разрабатываются в их интересах.
CUSV (Common Unmanned Surface Vessel). Беспилотный катер, относящийся к Fleet Class, разработан компанией Textron. В его задачи будут входить патрулирование, разведка и ударные операции. CUSV похож на обычный торпедный катер: 11 метров в длину, 3,08 м - в ширину, максимальная скорость - 28 узлов. Он может управляться либо оператором на дистанции до 20 км, либо через спутник на расстоянии до 1.920 км. Автономность работы CUSV составляет до 72 часов, на экономичном режиме - до одной недели.

ACTUV (Anti-Submarine Warfare Continous Trail Unmanned Vessel). Принадлежащий к Fleet Class 140-тонный БНА - автономный тримаран. Предназначение - охотник за подводными лодками. Способен разгоняться до 27 узлов, дальность плавания - до 6.000 км, автономность - до 80 суток. На борту имеет только сонары для обнаружения подлодок и средства связи с оператором для передачи координат найденной субмарины.
Ranger. БПА (X-Class), разработан компанией Nekton Research для участия в экспедиционных миссиях, заданиях по обнаружению подводных мин, разведывательных и патрульных миссиях. Ranger рассчитан на непродолжительные задания, при общей длине 0,86 м он весит чуть меньше 20 кг и двигается со скоростью порядка 15 узлов.
REMUS (Remote Environmental Monitoring Units). Единственный в мире подводный робот (X-Class), принимавший участие в боевых действиях в ходе Иракской войны 2003 года. БПА разработан на базе гражданского исследовательского аппарата Remus-100 фирмы Hydroid, филиала компании Kongsberg Maritime. Решает задачи проведения противоминной разведки и подводно-инспекционных работ в условиях мелкого моря. REMUS оснащен гидролокатором бокового обзора, обладающим повышенной разрешающей способностью (5х5 см на дистанции 50 м), доплеровским лагом, приемником GPS, а также датчиками температуры и удельной электрической проводимости воды. Масса БПА - 30,8 кг, длина - 1,3 м, рабочая глубина - 150 м, автономность - до 22 часов, скорость подводного хода - 4 узла.

Морские роботы России
Минобороны России расширяет спектр применения БПА и БНА для проведения морской разведки, борьбы с кораблями и БПА, противоминной борьбы, координированного запуска групп БПА против особо важных целей противника, обнаружения и уничтожения инфраструктуры, например силовых кабелей.
Российский военный флот, как и ВМС США, считает приоритетным направлением интеграцию БПА в атомные и неатомные подводные лодки пятого поколения. Сегодня для ВМФ России разрабатываются, а в частях флота эксплуатируются морские роботы различного назначения.
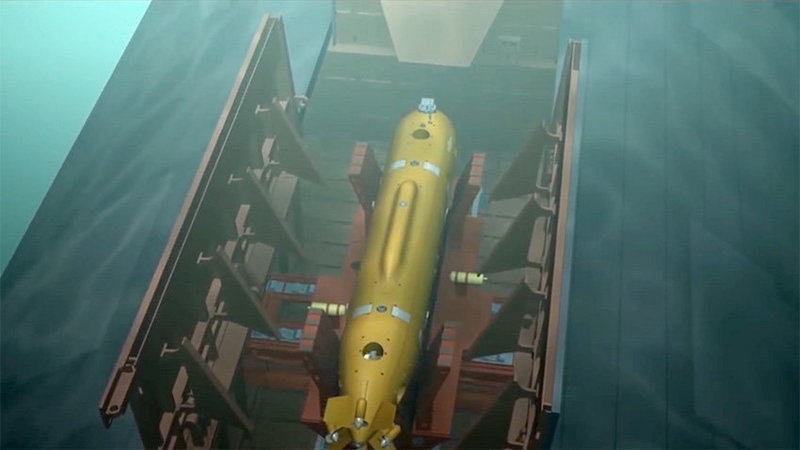
Два главных геополитических игрока - США и Россия ведут разработки и производят все новые и новые БНА и БПА. В долгосрочной перспективе это может привести к изменению морских доктрин обороны и тактикам проведения военно-морских операций. Пока морские роботы зависят от носителей, резких изменений ожидать не стоит, но то что они уже внесли изменения в баланс военно-морских сил - становится неоспоримым фактом.
При помощи этой системы производят поиск и подъем затонувших торпед, ракетных двигателей и головок, а также выполняют некоторые подводные работы, и в частности прокладывают подводные кабели, поднимают со дна моря предметы весом до 3,4 т, осматривают подводную часть кораблей.
Эта система может использоваться также для обнаружения затонувших подводных лодок.
Исполнительный орган представляет собой прочную сферу диаметром около 1 м и толщиной 12 мм, изготовленную из сплавов алюминия (рис. 11).
На сфере и внутри нее установлены различное оборудование, механизмы и устройства. В верхней части сферы имеется люк для доступа к оборудованию, а в нижней смонтировано несколько приспособлений для выполнения подводных работ, главным из которых является рычажный захват для подъема цилиндрических предметов. Другие приспособления служат для прокладки кабеля, установки предметов и подрывных зарядов.
В качестве движителей камеры используются два винта, способные поворачиваться в вертикальной плоскости независимо друг от друга и обеспечивающие разворот сферы и ее движение со cкоростью 1,7 уз.
Рычажный захват и привод разворота вала винтов работают от системы гидравлики, имеющей насос с электроприводом. Мощность электродвигателя 15 л. с., производительность насоса 3,64 л/мин при давлении 204 кг/см 2 . От системы гидравлики работают также поворотные механизмы рамы и телевизионной камеры.
В сфере установлены гидролокатор для измерения глубины и обнаружения предметов и прибор, дающий условный сигнал на поверхность при нарушении герметичности камеры.
Исполнительный орган снабжен телевизионной установкой, закрепленной на перемещающемся кронштейне. Четыре лампы мощностью по 500 вт обеспечивают дальность видимости предметов под водой до 7,5 м.
Сфера спускается с надводного корабля на стальном тросе диаметром 12,5 мм. Для передачи сигналов от телевизионной камеры, подачи электроэнергии, исполнительных команд и сигналов контроля служит специальный кабель.
Пульт управления, размещаемый на надводном корабле, контролирует курс и глубину погружения исполнительного органа, расстояние от дна, азимут плоскости захватов, угол их наклона, обороты винтов. На пульте имеется экран телевизора.
Кабель и трос намотаны на две лебедки, действующие синхронно. Оператор, работающий на пульте управления, получает данные о скорости вращения лебедки, длине вытравленного троса, температуре, напряжении и силе тока электрогенератора, подающего электроэнергию к исполнительному органу.
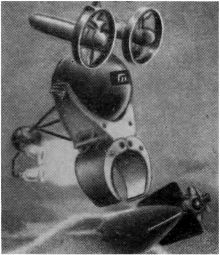
Самоходная установка РУМ (подводный дистанционно-управляемый манипулятор) для производства глубоководных исследований, построенная в США, рассчитана на глубину погружения до 600 м (рис. 12).

Рис. 12. Самоходная установка РУМ.
Эта установка может нести полезную нагрузку весом до 450 кг, а без манипулятора и до 900 кг, перемещаться по грунту со скоростью 3 уз, взбираться на возвышенности, имеющие уклон до 30°, и преодолевать преграды высотой до 30 см.
Основой для корпуса и ходовой части установки РУМ послужил пехотный самоходный транспортер. Установка имеет манипулятор, четыре телевизионные камеры и гидролокатор.
Стрела с гидравлическим приводом поддерживает манипулятор и дает ему возможность выдвигаться на длину 4,5 м, а также используется для подъема тяжелых предметов.
Телевизионная установка камеры имеет 4 объектива, два из которых направлены вперед, один — назад и один служит для контроля за движением манипулятора. Установка освещается ртутными лампами.
Управляется установка РУМ с берега по коаксиальному кабелю длиной 7600 м, по которому передаются 38 исполнительных команд и показаний приборов, сигналы от телевизионных камер и гидролокатора, а также электроэнергия для ламп освещения и главного электродвигателя.
Проектом предусмотрено иметь в комплекте РУМ подводный вертолет с подъемной силой 3630 кг при вертикальной скорости подъема 36,6 м/мин для преодоления непроходимых участков пути. Изменение угла поворота трех лопастей винта, скорости вращения и глубины погружения вертолета осуществляется по командам с берега.
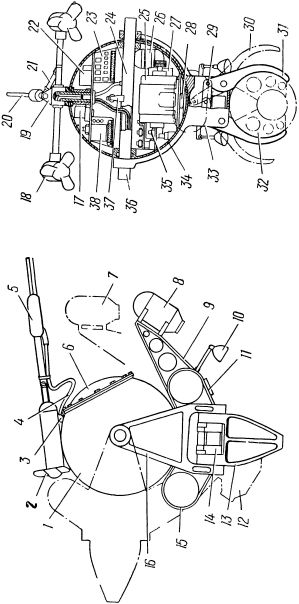
Вот как представляет инженер А. Н. Дмитриев будущую камеру, названную им батиандром, что означает глубинный человек (рис. 13).
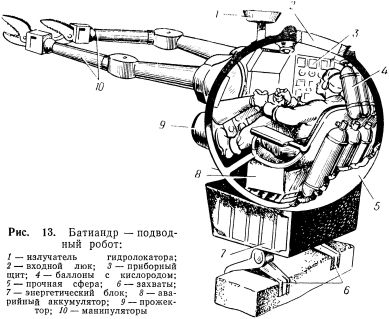
Рис. 13. Батиандр — подводный робот: 1 — излучатель гидролокатора; 2 — входной люк; 3 — приборный щит; 4 — баллоны с кислородом; 5 — прочная сфера; 6 — захваты; 7 — энергетический блок; 8 — аварийный аккумулятор; 9 — прожектор; 10 — манипуляторы.
По форме батиандр — сфера диаметром 1,5 м, имеющая люк и иллюминаторы для наблюдения. Батиандр, обладающий постоянной положительной плавучестью, по замыслу автора, сможет погружаться за счет принятия твердого балласта в клешнях. Кроме того, он снабжен гайдропом — тросом с грузом, обеспечивающим мягкую покладку камеры на грунт. В случае аварии оператор отдаст балласт, камера получит положительную плавучесть и быстро всплывет на поверхность. Перемещаться батиандр должен с помощью двух поворотных водометных движителей, которые обеспечат ему маневрирование во всех плоскостях.
Для производства работ предполагается иметь два манипулятора с гидравлическим приводом, подводный телевизор и гидролокатор. Внутри камеры должны постоянно поддерживаться благоприятные для человека условия. В качестве источника электроэнергии предполагается использовать аккумуляторную батарею большой емкости. Следует заметить, что создание подобной подводной камеры является осуществимой задачей.
Проблемы освоения глубин Мирового океана выдвигают требования о создании универсальных подводных роботов, способных добывать со дна моря полезные ископаемые и транспортировать их на сушу или поднимать на поверхность. Темпы изучения и освоения морских глубин в наши дни позволяют думать, что эта мечта осуществится в недалеком будущем.
Глава 4. Роботы на суше и на море
МИФЫ И РОБОТЫ
Роботы-пожарные
Роботы-пожарные Во многих домах имеются огнетушители, а как насчет робота-пожарного? Такой робот может обнаружить возгорание в любой части помещения, самостоятельно переместиться туда и загасить огонь.Идея робота-пожарного оказалась настолько популярной, что уже
Роботы в медицине
Роботы в медицине Роботов, используемых в медицине, можно отнести к трем категориям. Роботы первой категории используются в диагностике. Весной 1992 года компания Neuromedical Systems Inc. of Suffern, NY, выпустила на рынок изделие под названием Papnet. Система Papnet представляет собой
Военные роботы
Военные роботы Если государство оказывается вовлеченным в военный конфликт, то для достижения скорейшей победы при минимальных потерях использование роботов имеет исключительно важное значение, особенно в современных условиях. Например, использование беспилотной
Домашние роботы
Домашние роботы В домашнем хозяйстве роботы могут найти множество различных применений. С помощью роботов можно мыть окна и полы, делать мелкий домашний ремонт, чистить обивку мебели, стирать, готовить и выносить кошачьи экскременты. Здесь возникает интересный
Глава 11 Шагающие роботы
Глава 11 Шагающие роботы Шагающие роботы представляют собой класс роботов, имитирующих передвижение животных или насекомых. Как правило, для передвижения роботы используют механические ноги. Передвижение с помощью ног насчитывает миллионы лет истории. По контрасту,
Глава 13 Подводные роботы
Глава 13 Подводные роботы Робототехника подводных устройств развивается по многим направлениям. Большинство подводных роботов создаются для проведения спасательных операций и исследований. В будущем подводные роботы будут помогать осваивать океан для организации
Введение. Роботы – помощники человека
Роботы на укладке готовой продукции
Космические роботы
Роботы в сельском хозяйстве
Роботы для Мегамира
Роботы для Мегамира Казалось бы, куда уж дальше, но есть совершенно безграничная область для фантазии роботостроителей – мегамир. В наше время, когда человечество планомерно осваивает ближайшую соседку Земли – Луну, фантасты устремились к звёздам. В одной нашей
Роботы – игрушки
Роботы – игрушки На рис. 81 вы видите модель кибернетического краба, созданную юными техниками в пионерском лагере им. Вити Коробкова (Крымская обл.). Краб двигается на свет электрического фонаря или на солнечный свет, перемещаясь с помощью двух электродвигателей с
Человекоподобные роботы
Человекоподобные роботы Модель простейшего человекоподобного робота с программным управлением показана на рис. 84. Высота робота около 70 см, и, хотя вид у него внушительный, он сделан из тонкого картона, покрыт металлизированной бумагой и окрашен серебристо – голубой
Промышленные роботы сегодня
Читайте также: