Модуляция и демодуляция доклад
Обновлено: 02.07.2024
Передача информации в современном мире нас окружает повсюду: мобильная связь, интернет, управление воздушным движением и многое другое. Как правило, в качестве “переносчика” информации выступает высокочастотное колебание: 2.4 ГГц и 5 ГГц для Wi-Fi, 2.6 ГГц и другие для 4G, 1030 МГц и 1090 МГц для обмена данными с воздушными судами и т.д. Эти колебания (частоты) называются несущими. Как, используя несущую частоту, закодировать данные? Как передать или получить “0” или “1”? На эти вопросы мы и постараемся ответить.
Процесс изменения одного или нескольких параметров модулируемого несущего сигнала при помощи модулирующего сигнала называется модуляцией.
В рамках данной лекции мы рассмотрим следующие виды модуляции:
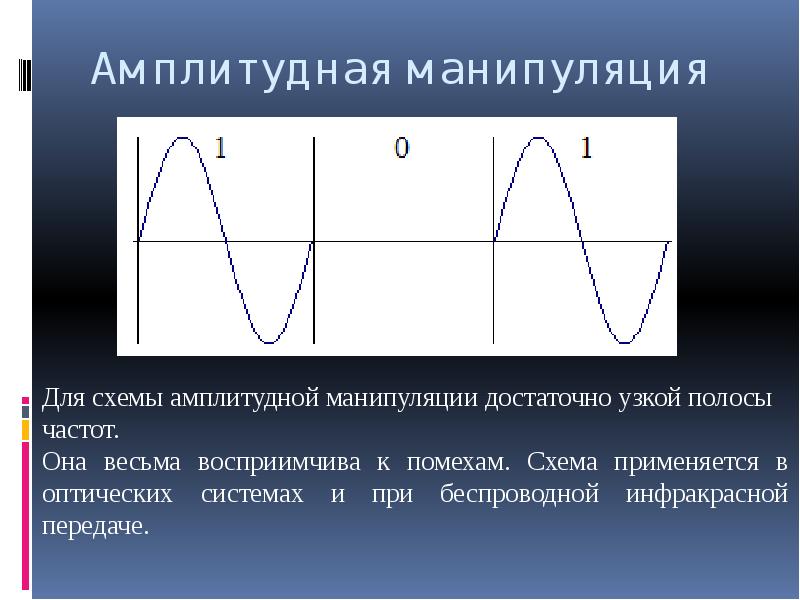
- ASK (Amplitude Shift Keying) — амплитудная манипуляция
- BPSK, QPSK (Binary Phase Shift Keying, Quadrature Phase Shift Keying) — фазовая манипуляция
- QASK (Quadrature Amplitude-Shift Keying) — квадратурная манипуляция
- FSK (Frequency Shift Keying), MSK (Minimum Shift Keying) — частотная манипуляция
Результат выполнения скрипта показан ниже:
Из рисунка видно, что амплитуда несущего (модулированного) сигнала — синий график — повторяет форму модулирующего сигнала — оранжевый график.
Теперь давайте сделаем следующую вещь: на комплексной плоскости отметим точки, соответствующие значениям, которые принимает наш закодированный сигнал. В Matlab это можно сделать с помощью функции scatterplot , указав в качестве входных параметров аналитический сигнал (мы его получим с помощью преобразования Гильберта), количество отсчётов на бит (у нас за это отвечает переменная n_for_bit ) и смещение от начала сигнала, с которым будут считываться биты (мы хотим считывать биты в их середине, поэтому смещение зададим n_for_bit/2 ):
Сигнальное созвездие ASK-модулированного сигнала
Т.к. мнимая часть равна нулю, мы видим два скопления точек вдоль действительной оси: одно вокруг значения 0.1, второе — вокруг 1. Этот график называется сигнальное созвездие. Он часто используется при анализе характеристик модулированных сигналов, т.к. показывает распределение мгновенного значения сигнала на комплексной плоскости в момент его считывания.
Итак, модулированный сигнал есть — попробуем его обратно демодулировать. Наша задача сводится к нахождению огибающей, а как мы выяснили на прошлой лекции — это легко сделать с помощью преобразования Гильберта. Затем создадим что-то вроде цифрового компаратора, с помощью которого зашумлённую огибающую превратим в прямоугольный цифровой сигнал. Дополним наш код:
Демодуляция ASK-модулированного сигнала
Как видим, демодулированный сигнал повторяет битовую последовательность, которую мы закодировали изначально в массиве code , а значит мы всё сделали правильно.
Ещё одним типом амплитудной манипуляции является OOK — On-Off Keying. Основное отличие от ASK — логический “ноль” кодируется амплитудой, равной нулю, “единице” соответствует номинальное значение амплитуды сигнала. Если в листинге “ASK-манипуляция, часть 1” в массиве code вместо всех значений 0.1 запишем 0 , то как раз получим OOK-манипуляцию.
Начнём с самого простого вида — BPSK — когда у нас всего два значения фазы — и .
Создадим скрипт, реализующий фазовую манипуляцию зашумлённой несущей частоты fc , равной 250 Гц. Кодовую последовательность по аналогии с первым примером будем задавать в массиве code . Перескок фазы будет осуществляться умножением синусоидального сигнала на +1 или -1:
Смотрим, что получилось:
Каждое изменение логического уровня модулирующего сигнала приводит к скачкообразному изменению фазы несущей частоты на , а это то, что нужно.
Теперь дополним код по аналогии с предыдущим примером и построим сигнальное созвездие:
Сигнальное созвездие BPSK-сигнала:
Сигнальное созвездие BPSK-сигнала
Мы имеем два скопления точек: вокруг (-1,0) и (1,0). Эти точки как раз соответствуют повороту вектора единичной длины на и вокруг начала координат. А значит, модуляция работает корректно.
Теперь наша задача — демодулировать сгенерированный сигнал. Для этого умножим его на несущую частоту fc , а затем применим к полученному сигналу ФНЧ с полосой пропускания 100 Гц, сгенерированный с помощью filterDesigner:
Обработка BPSK-модулированного сигнала
На верхнем графике наблюдаем синусоиды с частотой 2*fc , имеющие разные постоянные составляющие в зависимости от значения фазы модулированного сигнала. Для того, чтобы получить огибающую, мы воспользовались ФНЧ и получили нижний график. Теперь, чтобы преобразовать данный сигнал в цифровой код, разработаем простейший цифровой компаратор с пороговым значением 0.1 и построим результирующие графики:
Демодулированный сигнал на фоне модулированного сигнала представлен ниже:
Демодуляция BPSK-модулированного сигнала
Как видим, он повторяет форму модулирующего сигнала, заданного в начале листинга, но имеет временную задержку, возникающую в КИХ-ФНЧ.
В рассмотренном примере модулированный сигнал мог принимать два значения фазы: и , а значит в один момент времени (такт) можно закодировать только один бит информации — “0” или “1”. Если добавить ещё два изменения фазы ( и ), а затем повернуть полученную диаграмму на против часовой стрелки, получится QPSK-манипуляция, или квадратурная фазовая манипуляция. В этом случае мы за один такт сможем передавать сразу два бита информации! Посмотрим, как в этом случае будет выглядеть сигнальное созвездие. Разработаем скрипт, который формирует массив случайных данных data , которые затем преобразуем в массив значений PSK-сигнала с помощью функции pskmod , в качестве второго параметра которой будет порядок модуляции (для QPSK это M = 4 ). В качестве третьего параметра данной функции необходимо задать смещение нулевого значения фазы, в нашем случае, как было сказано выше, это (тогда, в идеальном случае, в каждом квадранте комплексной плоскости будет по одной точке созвездия). Далее добавим немного шума в этот сигнал, чтобы имитировать реальные условия передачи данных и построим сигнальное созвездие:
Получилось вот так:
Сигнальное созвездие сигнала с QPSK
Мы видим скопление точек вокруг значений >,\frac>\right)" width="68" height="33" />
, >,\frac>\right)" width="82" height="33" />
, >,-\frac>\right)" width="96" height="33" />
, >,-\frac>\right)" width="82" height="33" />
, каждая из которых соответствует положению единичного вектора, начало которого соответствует началу координат, при его повороте с шагом . Соответствие фазы и передаваемой информации будет иметь следующий вид:
Это значит, что при при той же самой символьной скорости сигнал с QPSK передаёт в 2 раза больше информации, чем сигнал с BPSK.
Здесь мы можем передавать за один такт сразу 3 бита. Однако, с увеличением порядка модуляции M , точки созвездия располагаются всё ближе и ближе друг другу, что может привести к ошибкам декодирования такого сигнала, если он сильно зашумлён. Можете поиграться со значениями M и параметром snr функции awgn , чтобы убедиться в этом на примере.
QASK (частный случай QAM — Quadrature Amplitude Modulation) — это вид манипуляции, при которой скачкообразно изменяется как амплитуда, так и фаза несущего сигнала, что позволяет за один такт (отсчёт) передать ещё больше информации, чем в рассмотренных ранее видах манипуляции. Можно сказать, что QASK — это комбинация ASK и PSK.
По традиции, сразу начнём с примера. Создадим несущую с частотой 1кГц, помимо этого создадим массив данных data , который будет содержать случайные числа. Зададим порядок модуляции M=16 , это значит, что за один такт будем передавать число от 0 до 15, или 4 бита. Один элемент — один такт передачи, количество элементов — 50. Затем создадим массив отсчётов QASK на базе этих данных с помощью функции qammod и построим сигнальное созвездие из полученного набора данных.
Результат показан ниже:
Сигнальное созвездие сигнала с 16-QASK
Это созвездие состоит из 16 групп точек, а значит сформированный сигнал принимает все возможные значения для QASK-манипуляции 16 порядка.
Теперь “поместим” эти данные на несущую частоту. Растянем массив данных до того же количества отсчётов, что и в сигнале несущей частоты (каждый бит повторим bit_size раз) и получим массив qmod . Поэлементно умножим действительные части данного массива на косинус с частотой fc , а мнимые — на синус той же частоты. Просуммируем полученные сигналы ( i и q соответственно), в результате чего получим модулированный сигнал y , который готов для передачи. Добавим в него шум для имитации электромагнитных помех и построим графики.
Действительная и мнимая части сигнала, а также сам сигнал y можно увидеть на рисунке ниже:
Синфазная, квадратурная составляющие и QASK-модулированный сигнал
Видно, что в процессе передачи данных изменяется как амплитуда, так и фаза несущей.
Теперь решим обратную задачу: демодулируем сигнал на нижнем графике. Для этого обратно выделим из него синфазную io и квадратурную qo составляющие умножением на косинус и синус несущей частоты соответственно. Чтобы убрать высокочастотную составляющую, как и в BPSK, применим ФНЧ, в результате чего получим сигналы iof и qof , графики которых затем и построим.
А вот и графики:
Синфазная и квадратурная составляющие демодулированного QASK-сигнала
Следует обратить внимание, что при выделении синфазной и квадратурной составляющей, мы также сделали умножение на два (и получили при этом правильные амплитуды). Давайте разбираться, в чём дело. Как было сказано выше, входной сигнал был умножен на функции и . При умножении на косинус получаем сигнал:

При умножении на синус:

После применения ФНЧ косинусоидальные и синусоидальные составляющие уходят, остаётся только постоянная составляющая:


Поэтому, чтобы скомпенсировать амплитуду демодулированного сигнала, в строчках 49 и 50 мы и сделали умножение на 2.
Далее преобразуем iof и qof в один комплексный сигнал of , который проредим, взяв из него отсчёты, расположенные в серединах временных отрезков, соответствующих битам данных. Затем воспользуемся функцией qamdemod и сравним результаты: что закодировали, и что в последствии декодировали.
Синий график на рисунке отображает входные данные, на основе которых был сформирован модулированный сигнал, красными крестиками — данные, полученные в результате демодуляции этого сигнала:
Сравнение данных до QASK-модуляции и после демодуляции
Как видим, два графика полностью совпадают, а это говорит о том, что реализованный нами алгоритм работает корректно.
Данный вид манипуляции считается самым помехоустойчивым, т.к. помехи чаще всего влияют на амплитуду, а не на несущую частоту. Частота логического “0” и логической “1” вычисляются по формулам:


При манипуляция называется Minimum Shift Keying (MSK) — манипуляция с минимальным сдвигом частоты.
И снова к примеру. Разработаем скрипт, формирующий FSK-модулированный сигнал. Несущую частоту выберем 500 Гц, индекс модуляции , период следования битов данных 10 мкс. На основе этого рассчитаем значение двух частот: f0 и f1 , кодирующие логический “0” и “1” соответственно.
Далее сформируем модулирующий сигнал по аналогии с тем, как мы это делали в примерах с BPSK и ASK:
Теперь создадим два сигнала: x0 с частотой f0 и x1 с частотой f1 . На базе этих сигналов и модулирующего сигнала fm сформируем модулированный сигнал x и построим графики.
Результат выполнения данного скрипта:
Из рисунка видно, что в зависимости от значения модулирующего сигнала, меняется частота несущей — это то, что нам нужно. Модулировать научились — теперь попробуем это демодулировать. Для этого умножим наш сигнал на косинусоиды с частотами f0 и f1 :
Сигналы y0 и y1 показаны ниже:
Результаты выполнения листинга “FSK-манипуляция, часть 4”
Теперь найдём разность этих сигналов и пропустим её через ФНЧ:
Результат показан ниже:
Результаты выполнения листинга “FSK-манипуляция, часть 5”
До финала осталось совсем немного — преобразовать нижний график в цифровой сигнал. Для этого, как и в случае с BPSK, воспользуемся цифровым компаратором и построим результирующий график:
Результат демодуляции показан ниже:
Как видим, оранжевый график имеет ту же форму, что и на первоначальном рисунке, но с уже привычной нам временной задержкой, возникающей в цифровом КИХ-фильтре.
Несущим сигналом может быть: постоянный ток - проводная телеграфия; переменный ток низкой или высокой частоты - телефония, тональная телеграфия, фототелеграф, телемеханика; высокочастотные импульсы - радиорелейная связь.
Модулируемые параметры называются информативными, и в качестве них могут использоваться: амплитуда; фаза; частота и др.
Используются следующие типы модуляции: гармоническая; импульсная; дискретная и их разновидности.
Демодуляция - отделение полезного (модулирующего) сигнала от несущей. Модуляция и демодуляция осуществляется с помощью устройств, называемых модулятором и демодулятором.
Модем - устройство, преобразующее код в сигнал (модулятор) и сигнал в код (демодулятор), используемое для передачи данных по каналам связи. Манипуляция - модуляция, при которой модулируемый параметр может принимать фиксированное число - m дискретных значений.
2. Гармоническая модуляция
При гармонической модуляции в качестве несущей используется сигнал:

. (1)
Она чаще всего используется при передаче двоичных кодов и называется манипуляцией. Используются различные виды гармонической модуляции (см. рис.1).
Амплитудная модуляция (АМ) - при этом посылка передается при "1" и отсутствует при "0"

(2)
Где w0 - частота несущей. Частотная модуляция (ЧМ) - при этом частота посылки при "1" и при "0" (например: 100 Гц и 1кГц).

(3)
Где w1 - частота манипуляции.
Фазовая модуляция (ФМ) - при этом фаза меняется на 180 градусов при изменении с "0" на "1" и с "1" на "0".

(4)

Рис.1. Виды гармонической модуляции
Сравнение видов модуляции. Различные типы модуляции отличаются: по требуемой мощности для организации передачи; по требуемой полосе частот или ширине спектра; по помехозащищенности; по экономичности и простоте реализации.
Кроме перечисленных видов гармонической манипуляции существует много разновидностей или производных методов. Например, метод относительной фазовой модуляции (ОФМ), который отличается высокой помехозащищенностью. Этот вид модуляции широко используется в модемах.
3. Импульсная модуляция
При импульсной модуляции в качестве несущей используется сигнал:

( 5)
Используются различные виды импульсной модуляции (см. рис.2).
Переносчик - последовательность импульсов определенной амплитуды, длительности , частоты следования и фазы (A, tи ,Tи , . ).
Амплитудно-импульсная модуляция (АИМ) - в зависимости от посылки "0" или "1" меняется амплитуда передаваемых импульсов.
Широтно-импульсная модуляция (ШИМ, ДИМ) – в зависимости от посылки "0" или "1" меняется длительность передаваемых импульсов.
Фазоимпульсная модуляция (ФИМ) - в зависимости от посылки "0" или "1" меняется фаза передаваемых импульсов.
Частотно импульсная модуляция (ЧИМ)- в зависимости от посылки "0" или "1" меняется период следования импульсов.
4. Широтно-импульсная модуляция
Широтно-импульсная модуляция - приближение желаемого сигнала (многоуровневого или непрерывного) к действительным бинарным сигналам (с двумя уровнями), так, что, в среднем, за некоторый отрезок времени, их значения равны. Формально, это можно записать так:

,
где x (t ) - желаемый входной сигнал в пределе от t1 до t2 , а ∆Ti - продолжительность i - го ШИМ импульса, каждого с амплитудой A . ∆Ti подбирается таким образом, что суммарные площади (энергии) обеих величин приблизительно равны за достаточно продолжительный промежуток времени, равны также и средние значения величин за период:

.
Управляемыми "уровнями", как правило, являются параметры питания силовой установки, например, напряжение импульсных преобразователей регуляторов постоянного напряжения/или скорость электродвигателя. Для импульсных источников x (t ) = Uconst стабилизации.
ШИП - широтно-импульсный преобразователь, генерирующий ШИМ-сигнал по заданному значению управляющего напряжения. Основное достоинство ШИМ - высокий КПД его усилителей мощности, который достигается за счёт использования их исключительно в ключевом режиме. Это значительно уменьшает выделение мощности на силовом преобразователе (СП).
При широтно-импульсной модуляции в качестве несущего колебания используется периодическая последовательность прямоугольных импульсов, а информационным параметром, связанным с дискретным модулирующим сигналом, является длительность этих импульсов. Периодическая последовательность прямоугольных импульсов одинаковой длительности имеет постоянную составляющую, обратно пропорциональную скважности импульсов, то есть прямо пропорциональную их длительности. Пропустив импульсы через ФНЧ с частотой среза, значительно меньшей, чем частота следования импульсов, эту постоянную составляющую можно легко выделить, получив постоянное напряжение. Если длительность импульсов будет различной, ФНЧ выделит медленно меняющееся напряжение, отслеживающее закон изменения длительности импульсов. Таким образом, с помощью ШИМ можно создать несложный ЦАП: значения отсчётов сигнала кодируются длительностью импульсов, а ФНЧ преобразует импульсную последовательность в плавно меняющийся сигнал.
ШИМ использует транзисторы (могут быть и др. элементы) не в активном (правильнее будет сказать - линейном), а в ключевом режиме, то есть транзистор всё время или разомкнут (выключен), или замкнут (находится в состоянии насыщения). В первом случае транзистор имеет бесконечное сопротивление, поэтому ток в цепи не течёт, и, хотя всё напряжение питания падает на транзисторе, то есть КПД=0%, в абсолютном выражении выделяемая на транзисторе мощность равна нулю. Во втором случае сопротивление транзистора крайне мало, и, следовательно, падение напряжения на нём близко к нулю - выделяемая мощность так же мала.

1.

2.
Принцип работы ШИМ
ШИМ есть импульсный сигнал постоянной частоты и переменной скважности, то есть отношения длительности импульса к периоду его следования. С помощью задания скважности (длительности импульсов) можно менять среднее напряжение на выходе ШИМ.
Генерируется аналоговым компаратором, на отрицательный вход которого подаётся опорный сигнал в виде "пилы" или "треугольника", а на положительный - собственно сам модулируемый непрерывный аналоговый сигнал. Частота импульсов соответствует частоте "зубъев" пилы. Ту часть периода, когда входной сигнал выше опорного, на выходе получается единица, ниже - нуль.
В цифровой технике, выходы которой могут принимать только одно из двух значений, приближение желаемого среднего уровня выхода при помощи ШИМ является совершенно естественным. Схема настолько же проста: пилообразный сигнал генерируется N -битным счётчиком. Цифровые устройства (ЦШИП) работают на фиксированной частоте, обычно намного превышающей реакцию управляемых установок (передискретизация ). В периоды между фронтами тактовых импульсов, выход ЦШИП остаётся стабильным, на нём действует либо низкий уровень либо высокий, в зависимости от выхода цифрового компаратора, сравнивающего значение счётчика с уровнем приближаемого цифрового сигнала V (n ). Выход за много тактов можно трактовать как череду импульсов с двумя возможными значениями 0 и 1, сменяющими друг-друга каждый такт Т . Частота появления единичных импульсов получается пропорциональной уровню приближаемого сигнала ~V (n ). Единицы, следующие одна за другой, формируют контур одного, более широкого импульса. Длительности полученных импульсов переменной ширины ~V (n ), кратны периоду тактирования T , а частота равна 1/ (T *2 N ). Низкая частота означает длительные, относительно T , периоды постоянства сигнала одного уровня, что даёт невысокую равномерность распределения импульсов.
Описанная цифровая схема генерации подпадает под определение однобитной (двухуровневой) импульсно-кодовой модуляции (ИКМ).1-битную ИКМ можно рассматривать в терминах ШИМ как серию импульсов частотой 1/T и шириной 0 либо T . Добиться усреднения за менее короткий промежуток времени позволяет имеющаяся передискретизация. Высоким качеством обладает такая разновидность однобитной ИКМ, как импульсно-плотностная модуляция (pulse density modulation ), которая ещё именуется импульсно-частотной модуляцией.
Восстанавливается непрерывный аналоговый сигнал арифметическим усреднением импульсов за много периодов при помощи простейшего фильтра низких частот. Хотя обычно даже этого не требуется, так как электромеханические составляющие привода обладают индуктивностью, а объект управления (ОУ) - инерцией, импульсы с выхода ШИП сглаживаются и ОУ, при достаточной частоте ШИМ-сигнала, ведёт себя как при управлении обычным аналоговым сигналом.
5. Дискретная модуляция
При кодоимпульсной модуляции (КИМ) каждому значению амплитуды сигнала в дискретные моменты времени соответствует "пачка" импульсов (рис.3).


Рис. 3. Дискретная модуляция
Число уровней квантования определяют разрядность двоичного кода. Например, для измерения в диапазоне 0-100 с точностью 0,1% необходимо 1000 уровней. Принимаем 1024=2 10 , что соответствует 10 разрядному двоичному коду.
Импульсная модуляция широко используется в телемеханике и многоканальной связи (например, радиорелейной), дискретная модуляция используется в телеметрии и т.д.
Список литературы
1. Гринченко А.Г. Теория информации и кодирование: Учебн. пособие. - Харьков: ХПУ, 2000.
2. Куприянов М.С., Матюшкин Б.Д. - Цифровая обработка сигналов: процессоры, алгоритмы, средства проектирования. - СПб.: Политехника, 1999.
3. Хемминг Р.В. Цифровые фильтры: Пер. с англ. / Под ред. А.М. Трахтмана. - М.: Сов. радио, 1980.
4. Сиберт У.М. Цепи, сигналы, системы: В 2-х ч. / Пер. с англ. - М.: Мир, 1988.
5. Феер К. Беспроводная цифровая связь. Методы модуляции и расширения спектра. Пер. с англ. - М.: Радио и связь, 2000.
6. Баскаков С.И. Радиотехнические цепи и сигналы: Учеб. для вузов по спец. "Радиотехника". - М.: Высш. шк., 2000.
В качестве несущего могут быть использованы колебания различной формы (прямоугольные, треугольные и т. д.), однако чаще всего применяютсягармонические колебания. В зависимости от того, какой из параметров несущего колебания изменяется, различают вид модуляции (амплитудная,частотная, фазовая и др.). Модуляция дискретным сигналом называется цифровой модуляцией или манипуляцией.
Работа состоит из 1 файл
Демодуляция.docx
Модуляция и демодуляция сигнала
Модуляция - изменение информативных параметров некоторых первичных физических процессов (сигналов), рассматриваемых как носители информации, в соответствии с передаваемой (включаемой и сигнал) информацией.
Виды модуляции связаны с типом сигнала-носителя. В современной информатике выделяют три его типа: фиксированный уровень,колебания, импульсы.
Демодуляция – восстановление величин, вызвавших изменение параметров носителей при модуляции. Выполняется на принимающей стороне при известных условиях модуляции на передающей стороне.
В качестве несущего могут быть использованы колебания различной формы (прямоугольные, треугольные и т. д.), однако чаще всего применяютсягармонические колебания. В зависимости от того, какой из параметров несущего колебания изменяется, различают вид модуляции (амплитудная,частотная, фазова я и др.). Модуляция дискретным сигналом называется цифровой модуляцией или манипуляцией.
- Амплитудная модуляция (АМ)
- Амплитудная модуляция с одной боковой полосой (SSB — однополосная АМ)
- Балансная амплитудная модуляция (БАМ) — АМ с подавлением несущей
- Квадратурная модуляция (QAM)
- Частотная модуляция (ЧМ)
- Линейная частотная модуляция (ЛЧМ)
- Импульсно-кодовая модуляция (И КМ или PCM — Pulse Code Modulation)
- Дифференциальная импульсно-кодовая модуляция (ДИКМ или DPCM — Differential PCM)
- Адаптивная дифференциальная импульсно-кодовая модуляция (АДИКМ или ADPCM — Adaptive DPCM)
- Энергетическая эффективность (потенциальная помехоустойчивость) характеризует достоверность передаваемых данных при воздействии на сигнал аддитивного белого гауссовского шума, при условии, что последовательность символов восстановлена идеальным демодулятором. Определяется минимальным отношением сигнал/шум (Eb/N0), которое необходимо для передачи данных через канал с вероятностью ошибки, не превышающей заданную. Энергетическая эффективность определяет минимальную мощность передатчика, необходимую для приемлемой работы. Характеристикой метода модуляции является кривая энергетической эффективности — зависимость вероятности ошибки идеального демодулятора от отношения сигнал/шум (Eb/N0).
- Спектральная эффективность — отношение скорости передачи данных к используемой полосе пропускания радиоканала.
- AMPS: 0,83
- NMT: 0,46
- GSM: 1,35
Демодуляция (Детектирование сигнала) — процесс, обратный модуляции колебаний, преобразование модулированных колебаний высокой (несущей) частоты в колебания с частотой модулирующего сигнала.
Для передачи энергии электромагнит ной волны используются высокочастотные колебания, а колебания низкой частоты используются длямодуляции (слабого изменения амплитуды или фазы) высокочастотных колебаний. На принимающей станции из этих сложных колебаний с помощью специальных методов снова выделяют колебания низкой частоты, которые после усиления подаются на громкоговоритель. Этот процесс выделения информации из принятых модулированных колебаний получил название демодуляции, или детектирования колебаний.
Рис. 1. Система передачи информации по радиоканалу
Отобразить графики временных и спектральных функций на выходе каждого блока. Параметры системы передачи приведены ниже.
Вариант 6: источник сигнала - гармонический сигнал по закону синуса в третьей степени с частотой 130 Гц. Вид модуляции - фазовая модуляция с индексом модуляции 4. Несущая частота 3 кГц. Отношение сигнал/шум 9 дБ. Частота дискретизации 8 кГц.
Построение частотного и временного спектра исходного сигнала
Зададим исходный сигнал с частотой fс=130 Гц и построим 3 периода. Для вычисления и графического отображения спектра сигнала используется дискретное преобразование Фурье (ДПФ).
n1=length(t1); %длина интервала времени (количество точек)
F1=(0:n1-1)/n1*Fs; %ось частот в Гц
При построении спектра была показана только половина оси частот (от 0 до Fs/2). Это сделано для того, чтобы сформировать АЧХ только исходного спектра, не затрагивая дополнительные сдвинутые копии
На полученных графиках видно, что в спектре функции sin 3 (x) присутствует еще и составляющая 3-й гармоники, причем она в 3 раза меньше 1-ой.
Рис. 2. Временной и частотный спектры исходного сигнала
Модуляция исходного сигнала
Промодулируем исходный сигнал в соответствии с требования задания (продолжение программы) и найдем его амплитудный спектр:
Fc = 3000; %несущая частота
k = 4; %индекс модуляции
subplot(6, 2, 3) %график модулированной функции
Графики приведены на рис. 3.
Модуляция и демодуляция
- 1. Типы модуляции
- 2. Гармоническая модуляция
- 3. Импульсная модуляция
- 4. Широтно-импульсная модуляция
- 5. Дискретная модуляция
- Список литературы
1. Типы модуляции
Несущим сигналом может быть: постоянный ток - проводная телеграфия; переменный ток низкой или высокой частоты - телефония, тональная телеграфия, фототелеграф, телемеханика; высокочастотные импульсы - радиорелейная связь.
Модулируемые параметры называются информативными, и в качестве них могут использоваться: амплитуда; фаза; частота и др.
Используются следующие типы модуляции: гармоническая; импульсная; дискретная и их разновидности.
Демодуляция - отделение полезного (модулирующего) сигнала от несущей. Модуляция и демодуляция осуществляется с помощью устройств, называемых модулятором и демодулятором.
Модем - устройство, преобразующее код в сигнал (модулятор) и сигнал в код (демодулятор), используемое для передачи данных по каналам связи.Манипуляция - модуляция, при которой модулируемый параметр может принимать фиксированное число - m дискретных значений.
2. Гармоническая модуляция
При гармонической модуляции в качестве несущей используется сигнал:
Она чаще всего используется при передаче двоичных кодов и называется манипуляцией. Используются различные виды гармонической модуляции (см. рис.1).
Амплитудная модуляция (АМ) - при этом посылка передается при "1" и отсутствует при "0"
Где w0 - частота несущей. Частотная модуляция (ЧМ) - при этом частота посылки при "1" и при "0" (например: 100 Гц и 1кГц).
Где w1 - частота манипуляции.
Фазовая модуляция (ФМ) - при этом фаза меняется на 180 градусов при изменении с "0" на "1" и с "1" на "0".
Рис.1. Виды гармонической модуляции
Сравнение видов модуляции. Различные типы модуляции отличаются: по требуемой мощности для организации передачи; по требуемой полосе частот или ширине спектра; по помехозащищенности; по экономичности и простоте реализации.
Кроме перечисленных видов гармонической манипуляции существует много разновидностей или производных методов. Например, метод относительной фазовой модуляции (ОФМ), который отличается высокой помехозащищенностью. Этот вид модуляции широко используется в модемах.
3. Импульсная модуляция
При импульсной модуляции в качестве несущей используется сигнал:
Используются различные виды импульсной модуляции (см. рис.2).
Рис.2. Виды импульсной модуляции
Переносчик - последовательность импульсов определенной амплитуды, длительности , частоты следования и фазы (A, tи ,Tи, . ).
Амплитудно-импульсная модуляция (АИМ) - в зависимости от посылки "0" или "1" меняется амплитуда передаваемых импульсов.
Широтно-импульсная модуляция (ШИМ, ДИМ) - в зависимости от посылки "0" или "1" меняется длительность передаваемых импульсов.
Фазоимпульсная модуляция (ФИМ) - в зависимости от посылки "0" или "1" меняется фаза передаваемых импульсов.
Частотно импульсная модуляция (ЧИМ)- в зависимости от посылки "0" или "1" меняется период следования импульсов.
4. Широтно-импульсная модуляция
Широтно-импульсная модуляция - приближение желаемого сигнала (многоуровневого или непрерывного) к действительным бинарным сигналам (с двумя уровнями), так, что, в среднем, за некоторый отрезок времени, их значения равны. Формально, это можно записать так:
Вы можете изучить и скачать доклад-презентацию на тему Модуляция и демодуляция. Презентация на заданную тему содержит 11 слайдов. Для просмотра воспользуйтесь проигрывателем, если материал оказался полезным для Вас - поделитесь им с друзьями с помощью социальных кнопок и добавьте наш сайт презентаций в закладки!
![500]()
![500]()
![500]()
![500]()
![500]()
![500]()
![500]()
![500]()
![500]()
![500]()
![500]()
Модуляция Модуляция – это процесс изменения одного или нескольких параметров колебания (несущей частоты) под воздействием информационного сигнала. В качестве несущей частоты чаще всего применяются гармонические колебания.
Аналоговая модуляция Аналоговая модуляция применяется для переноса спектра информационного сигнала в область высоких частот, где передача электромагнитных сигналов посредством излучения более эффективна.
Виды аналоговой модуляции Для аналоговой модуляции существуют три основные схемы: амплитудная модуляция (Amplitude modulation, AM) частотная модуляция (Frequency modulation, FM) фазовая модуляция (Phase modulation, РМ)
Демодуляция (детектирование) Демодуляция – это процесс, обратный модуляции. Демодуляция – это преобразование электрических колебаний, в результате которого получаются колебания более низкой частоты или постоянный ток. Детектирование осуществляется устройством, содержащим элемент с односторонней проводимостью – детектор.
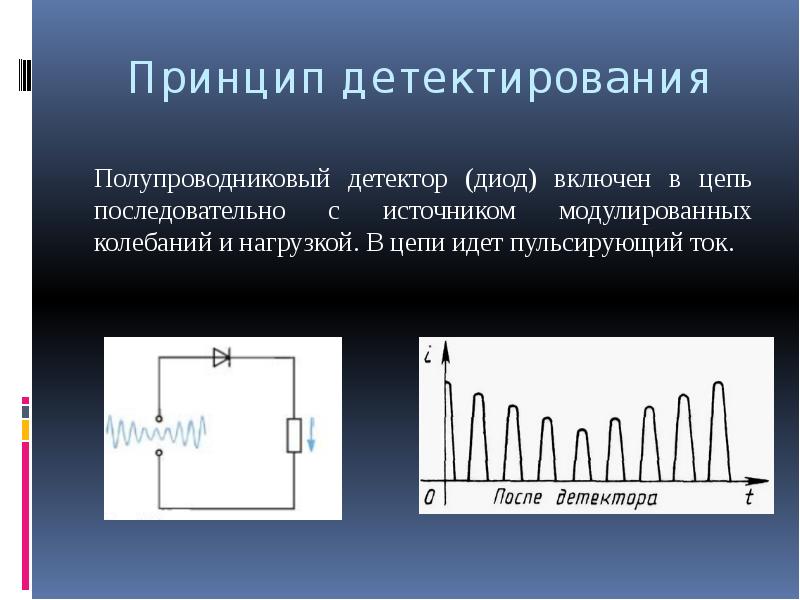
Принцип детектирования Полупроводниковый детектор (диод) включен в цепь последовательно с источником модулированных колебаний и нагрузкой. В цепи идет пульсирующий ток.
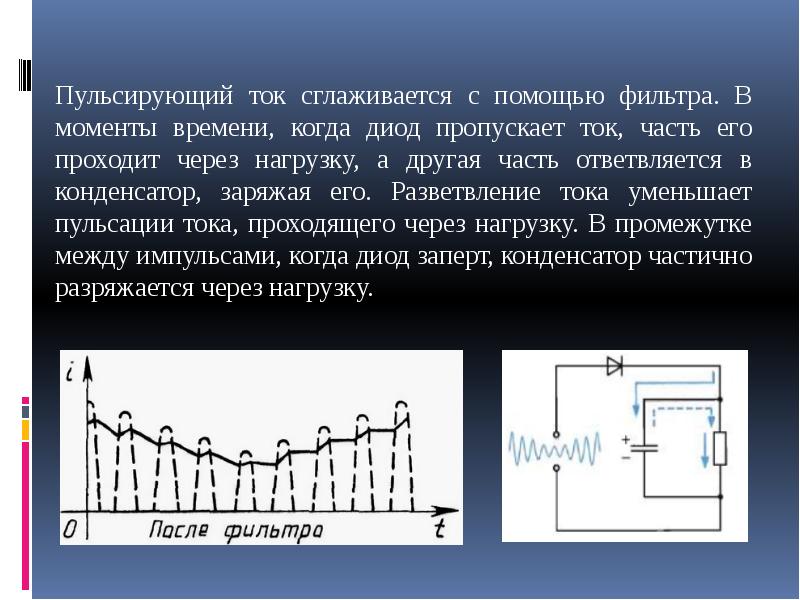
Пульсирующий ток сглаживается с помощью фильтра. В моменты времени, когда диод пропускает ток, часть его проходит через нагрузку, а другая часть ответвляется в конденсатор, заряжая его. Разветвление тока уменьшает пульсации тока, проходящего через нагрузку. В промежутке между импульсами, когда диод заперт, конденсатор частично разряжается через нагрузку. Пульсирующий ток сглаживается с помощью фильтра. В моменты времени, когда диод пропускает ток, часть его проходит через нагрузку, а другая часть ответвляется в конденсатор, заряжая его. Разветвление тока уменьшает пульсации тока, проходящего через нагрузку. В промежутке между импульсами, когда диод заперт, конденсатор частично разряжается через нагрузку.
Конденсатор подзаряжается с каждым новым импульсом. Через нагрузку идет ток звуковой частоты, форма колебаний которого точно воспроизводит форму низкочастотного сигнала на передающей станции Конденсатор подзаряжается с каждым новым импульсом. Через нагрузку идет ток звуковой частоты, форма колебаний которого точно воспроизводит форму низкочастотного сигнала на передающей станции
Читайте также:
- Дифференциальная импульсно-кодовая модуляция (ДИКМ или DPCM — Differential PCM)