
Космические системы навигации сша доклад
Обновлено: 17.05.2024
- Для учеников 1-11 классов и дошкольников
- Бесплатные сертификаты учителям и участникам
Глобальные навигационные спутниковые системы (ГНСС).
Объяснить, что такое ГНСС.
Объяснить общие принципы работы спутниковой навигации(СН).
Описать действующие СНС- GPS и GLONASS , их составляющих (космический и наземный сегменты) и областей применения.
Рассказать, какие СНС готовятся к запуску или находятся в стадии разработки( GALLILEO , COMPASS ).
Объяснить сбои СНС:
Во время солнечных вспышек.
Во время геомагнитных возмущений.
Рассказать о факторах, влияющих на ухудшение точности позиционирования.
Спутниковая навигация: понятие, система, действие.


Сколько существует человечество, столько и решается вопрос о том, как определить свое местоположение на суше и на море, в лесу или в городе. На сегодняшний день отпала необходимость ориентироваться, как древние путешественники и мореплаватели по звездам или компасу. Эпоха открытия радиоволн существенно упростило задачу навигации и открыло новые перспективы перед человечеством во многих сферах жизни и деятельности, а с открытием возможности покорения космического пространства совершился огромный прорыв в области определения координат местоположения объекта на Земле. Искусственные спутники Земли стали опорными станциями для радионавигации и на сегодняшний день системы спутниковой навигации стали доступны не только военным или морякам, но и простым людям, частным лицам и компаниям, для которых навигация необходима.
Понятие: Спутниковая система навигации
— комплексная электронно-техническая система, состоящая из совокупности наземного и космического оборудования, предназначенная для определения местоположения (географических координат и высоты), а также параметров движения (скорости и направления движения и т. д.) для наземных, водных и воздушных объектов.
Действие: Принцип работы спутниковых систем навигации основан на измерении расстояния от антенны на объекте (координаты которого необходимо получить) до спутников, положение которых известно с большой точностью. Таблица положений всех спутников называется альманахом, которым должен располагать любой спутниковый приёмник до начала измерений. Обычно приёмник сохраняет альманах в памяти со времени последнего выключения и если он не устарел — мгновенно использует его. Каждый спутник передаёт в своём сигнале весь альманах.
Таким образом, зная расстояния до нескольких спутников системы, с помощью обычных геометрических построений, на основе альманаха, можно вычислить положение объекта в пространстве. Метод измерения расстояния от спутника до антенны приёмника основан на определённости скорости распространения радиоволн. Для осуществления возможности измерения времени распространения радиосигнала, каждый спутник навигационной системы излучает сигналы точного времени, в составе своего сигнала используя точно синхронизированные с системным временем атомные часы.
При работе спутникового приёмника его часы синхронизируются с системным временем и при дальнейшем приёме сигналов вычисляется задержка между временем излучения, содержащимся в самом сигнале, и временем приёма сигнала. Располагая этой информацией, навигационный приёмник вычисляет координаты антенны. Для получения информации о скорости большинство навигационных приёмников используют эффект Доплера. Дополнительно накапливая и обрабатывая эти данные за определённый промежуток времени, становится возможным вычислить такие параметры движения, как скорость (текущую, максимальную, среднюю), пройденный путь и т. д. В реальности работа системы происходит значительно сложнее.
Ниже перечислены некоторые проблемы, требующие специальных технических приёмов по их решению: Отсутствие атомных часов в большинстве навигационных приёмников. Этот недостаток обычно устраняется требованием получения информации не менее чем с трёх (2-мерная навигация при известной высоте) или четырёх (3-мерная навигация) спутников; (При наличии сигнала хотя бы с одного спутника можно определить текущее время с хорошей точностью). Неоднородность гравитационного поля Земли, влияющая на орбиты спутников; Неоднородность атмосферы, из-за которой скорость и направление распространения радиоволн может меняться в определённых пределах; Отражения сигналов от наземных объектов, что особенно заметно в городе; Невозможность разместить на спутниках передатчики большой мощности, из-за чего приём их сигналов возможен только в прямой видимости на открытом воздухе.
История и перспективы развития.
Долговременная программа развития космической навигационной системы реализовывается по следующим укрупненным этапам:
Эксперты считают, что главные задачи в нынешний период восстановления и развития ГЛОНАСС это:
- развивать орбитальную группировку до 6 плоскостей с 48 спутниками с целью обеспечения высокоточного позиционирования в условиях закрытой местности (такая программа уже принята США);
- обеспечить радиоэлектронную безопасность и независимость системы;
- А главное - привлечь к работе настоящих специалистов, которые способны доложить всю правду о ГЛОНАСС. ГЛОНАСС является приоритетной из всех космических программ, потому что без нее через несколько лет Россия останется беззащитной. Без ГЛОНАСС асимметричный ответ на американскую ПРО и прочие потенциальные угрозы в принципе невозможен. Поэтому президент так настойчиво требует в максимально короткие сроки возродить ГЛОНАСС.
Принцип работы.
Спутники системы ГЛОНАСС непрерывно излучают навигационные сигналы двух типов: навигационный сигнал стандартной точности (СТ) в диапазоне L1 (1,6 ГГц) и навигационный сигнал высокой точности (ВТ) в диапазонах L1 и L2 (1,2 ГГц). Информация, предоставляемая навигационным сигналом СТ, доступна всем потребителям на постоянной и глобальной основе и обеспечивает, при использовании приёмников ГЛОНАСС, возможность определения:
* горизонтальных координат с точностью 50-70 м (вероятность 99,7%);
* вертикальных координат с точностью 70 м (вероятность 99,7%);
* составляющих вектора скорости с точностью 15 см/с (вероятность 99,7%)
* точного времени с точностью 0,7 мкс (вероятность 99,7%).
Эти точности можно значительно улучшить, если использовать дифференциальный метод навигации и/или дополнительные специальные методы измерений.
Сигнал ВТ предназначен, в основном, для потребителей Министерства обороны России, и его несанкционированное использование не рекомендуется. Вопрос о предоставлении сигнала ВТ гражданским потребителям находится в стадии рассмотрения.
Для определения пространственных координат и точного времени требуется принять и обработать навигационные сигналы не менее чем от 4-х спутников ГЛОНАСС. При приёме навигационных радиосигналов ГЛОНАСС приёмник, используя известные радиотехнические методы, измеряет дальности до видимых спутников и измеряет скорости их движения.
Одновременно с проведением измерений в приёмнике выполняется автоматическая обработка содержащихся в каждом навигационном радиосигнале меток времени и цифровой информации. Цифровая информация описывает положение данного спутника в пространстве и времени (эфемериды) относительно единой для системы шкалы времени и в геоцентрической связанной декартовой системе координат. Кроме того, цифровая информация описывает положение других спутников системы (альманах) в виде кеплеровских элементов их орбит и содержит некоторые другие параметры. Результаты измерений и принятая цифровая информация являются исходными данными для решения навигационной задачи по определению координат и параметров движения. Навигационная задача решается автоматически в вычислительном устройстве приёмника, при этом используется известный метод наименьших квадратов. В результате решения определяются три координаты местоположения потребителя, скорость его движения и осуществляется привязка шкалы времени потребителя к высокоточной шкале Универсального координированного времени (UTC).
ГЛОНАСС сегодня.
Сравнение ГЛОНАСС и GPS.

НЕДОСТАКИ GPS-СИСТЕМЫ.
Несмотря на все преимущества, у GPS-систем есть и недостатки. Например, GPS- приемник может быть отключен в любой момент, скажем, из соображений безопасности США. Кроме того, внедрение GPS- технологии подразумевает наличие подробных электронных карт c масштабом до 100 м, которые есть в свободной продаже не в каждой стране. Нельзя не упомянуть то обстоятельство, что при вычислении координат спутниковая система допускает погрешности. Природа этих ошибок различна. Основными источниками ошибок, влияющими на точность навигационных вычислений в GPS-системе, в частности, являются:
-погрешности, обусловленные режимом селективного доступа (Selective availability, S/A). Используя данный режим, Министерство Обороны США намеренно снижает точность определения местонахождения для гражданских лиц. В режиме S/A формируются ошибки искусственного происхождения, вносимые в сигнал на борту GPS-спутников с целью огрубления навигационных измерений. Такими ошибками являются неверные данные об орбите спутника и искажения показаний его часов за счет внесения добавочного псевдослучайного сигнала. Величина среднеквадратического отклонения из-за влияния этого фактора составляет, примерно, 30 м.
-погрешности, связанные с распространением радиоволн в тропосфере. Возникают при прохождении радиоволн через нижние слои атмосферы. Значения погрешностей этого вида при использовании сигналов с С/А- кодом не превышают 30 м.
-эфемеридная погрешность. Ошибки обусловлены расхождением между фактическим положением GPS-спутника и его расчетным положением, которое устанавливается по данным навигационного сигнала, передаваемого с борта спутника. Значение погрешности обычно не боее 3м.
- погрешность ухода шкалы времени спутника вызвана расхождением шкал времени различных спутников. Устраняется с помощью наземных станций слежения или за счет компенсации ухода шкалы времени в дифференциальном режиме определения местоположения.
- погрешность определения расстояния до спутника является статистическим показателем. Он вычисляется для конкретного спутника и заданного интервала времени. Ошибка не коррелированна с другими видами погрешностей. Ее величина обычно не превышает 10 м.
НЕДОСТАТКИ СИСТЕМЫ ГЛОНАСС:
-необходимость сдвига диапазона частот вправо, так как в настоящее время ГЛОНАСС мешает работе как подвижной спутниковой связи, так и радиоастрономии
-при смене эфемерид спутников, погрешности координат в обычном режиме увеличиваются на 25-30м, а в дифференциальном режиме - превышают 10 м;
-при коррекции набежавшей секунды нарушается непрерывность сигнала ГЛОНАСС. Это приводит к большим погрешностям определения координат места потребителя, что недопустимо для гражданской авиации;
-сложность пересчета данных систем ГЛОНАСС и GPS из-за отсутствия официально опубликованной матрицы перехода между используемыми системами координат.
Однако он был сорван из-за разногласий между правительствами стран ЕС и нежелания частных компаний инвестировать в Galileo. Консорциум частных компаний состоял из EADS, Thales, Inmarsat, Alcatel-Lucent, Finmeccanica, AENA, Hispasat и немецкой группы, включающей Deutsche Telekom и German Aerospace Centre.
В мае 2007 года консорциум вышел из проекта, и руководство Galileo взяла на себя Еврокомиссия. Сейчас из 30 планируемых спутников на орбите находится только один, второй планируется вывести на орбиту 27 апреля 2008 года.
На данный момент ЕС потратил на реализацию проекта около 1 млрд евро
Влияние ионосферы на характеристики трансионосферных радиосигналов
Электромагнитные волны, распространяющиеся через ионосферу, испытывают самые разнообразные возмущения. Основной характеристикой ионосферы, определяющей изменение параметров радиоволны, является интегральное (полное) электронное содержание I ( t ) или его производные (по времени и пространству) I ´ t ( t ), I′ x ( t ) и I′ y ( t ) вдоль пути распространения.
Изменения ПЭС можно условно разделить на регулярные и нерегулярные. Регулярные изменения (сезонные, суточные), по крайней мере, для магнитоспокойной среднеширотной ионосферы, описываются моделями, дающими относительные точности прогноза ПЭС до 50 - 80 %. Нерегулярные изменения (вариации) связаны с ионосферными неоднородностями различной природы, спектр которых носит степенной характер.
В результате проведенных в последнее время исследований стало ясно, что возмущения ионосферы во время магнитных бурь сказываются на деградации сигналов и сбоях системы GPS не только на экваторе и в полярной зоне, но даже на средних широтах. Однако вопрос о причинах и конкретных механизмах этого влияния остается в значительной степени открытым.
Основной задачей будущих исследований является изучение физических механизмов многомасштабных вариаций полного электронного содержания в ионосфере во время геомагнитных возмущений околоземного космического пространства, сопровождающихся деградацией сигналов и сбоями спутниковых радиотехнических систем. Эти исследования должны носить комплексный характер с максимальным привлечением ряда независимых экспериментальных средств мониторинга ионосферы (цифровые ионозонды, радары некогерентного рассеяния, ЛЧМ-ионозонды и т.д.).
Каждый полный набор данных включает ионосферную модель, которая используется в приемнике для аппроксимации задержки фазы сигнала при его прохождении через ионосферу при любом расположении спутников и в любой момент времени. Методы измерение дальности до спутника С помощью псевдослучайного кода. Псевдодальность – расстояние между антенной приемника и спутником измеренное с помощью псевдослучайного кода. Как говорилось раньше, эти расстояния необходимы для расчета координат. Процедура определения псевдодальности, может быть описана следующим образом.
Представим, что часы на спутнике и приемнике полностью синхронизированы друг с другом. Когда код PRN передается от спутника, приемник воспроизводит точную копию того же кода. После некоторое время, код переданный спутником будет принят приемником. Сравнивая переданный код и его точную копию, приемник может вычислить время нужное для того чтоб код достиг приемника. Умножение времени путешествия на скоростью света дает нам дальность между спутником и приемником . Измерения расстояния по коду К сожалению, предположение, что приемник и спутниковые часы полностью синхронизированы, не совсем верен. Этот метод вычисления дальности требовал бы очень точной синхронизации часов спутника и приемника. На спутники GPS стоят очень точные атомные часы, очень дорого обеспечить такими часами приемник, так как их цена может достигать 20 000 $.
Проблему синхронизации часов решают, рассматривая ошибку часов приемника как дополнительное неизвестное в навигационных уравнениях.
Расстояния между спутником и приемником - сумма общего количества полных циклов плюс дробный цикл между приемником и спутник, умноженный на длину волны несущей. Дальность, определенная с помощью фазы несущей, имеет намного большую точность чем дальность, полученная с помощью кода.
Есть, однако, одна проблема. Несущая это синусоидальная волна, что означает, что все циклы выглядят одинаково. Поэтому, приемник GPS не может отличить один цикл от другого. Другими словами, приемник, сразу при включении, не может определить общее количество полных циклов между спутником и приемником. Он может определить только дробную часть цикла (с точность не менее 2 мм), в то время как полное число циклов остается неизвестным, или неоднозначным.
К счастью, приемник может отслеживать изменение фазы, будучи включенным. Это означает, что начальная неопределенность решается с течением временем. Определение полного числа циклов несущей (длин волн) между антенной и спутником называется разрешением неоднозначности - поиском целого значения числа длин волн. Для измерений в режиме с постобработкой, который используется для определения местоположения с точностью на уровне сантиметра, это целое значение определяется во время обработки на компьютере. Для измерений в реальном времени, которые используются для определения местоположения с точностью на уровне сантиметра, это целое значение определяется в течение процесса называемого инициализацией.
Пропуск цикла сигнал - это скачок в целое число циклов в фазе несущей при измерении дальности. Пропадание сигнала может быть вызвано преградой между сигналом и спутником. Радиопомехи, ионосферное возмущение, и высокая динамика приемника - все это также может быть причинной пропадания сигнала. Так же проскальзывания цикла может произойти из-за сбоя приемника. Пропуск цикла может длиться в течение любого времени.
Вам необходимо знать координаты вашей базовой станции как можно точнее, так как точность получаемая в результате дифференциальной коррекции напрямую зависит от точности координат базовой станции. Существует два метода выполнения дифференциальной коррекции, в реальном времени и в постобработке
Шебшаевич В. С., Дмитриев П. П., Иванцев Н. В. и др. Сетевые спутниковые радионавигационные системы / Под ред. В. С. Шебшаевича. — 2-е изд., перераб. и доп. — М.: Радио и связь, 1993. — 408 с. — ISBN 5-256-00174-4
ИНТЕРФЕЙСНЫЙ КОНТРОЛЬНЫЙ ДОКУМЕНТ (редакция 5.0). КООРДИНАЦИОННЫЙ НАУЧНО-ИНФОРМАЦИОННЫЙ ЦЕНТР (2002). — официальное техническое описание параметров и сигнала ГЛОНАСС. Проверено 14 декабря 2009.
ИНТЕРФЕЙСНЫЙ КОНТРОЛЬНЫЙ ДОКУМЕНТ (редакция 5.1). РОССИЙСКИЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ КОСМИЧЕСКОГО ПРИБОРОСТРОЕНИЯ (2008). — официальное техническое описание параметров и сигнала ГЛОНАСС. Проверено 14 декабря 2009.
В настоящее время система NNSS, помимо навигации подводных лодок и надводных кораблей, используется также при проведении геодезических и океанографических работ. Кроме того, эту систему предполагается использовать для определения местоположения самолётов, танков и других объектов на местности.
Для определения координат объекта по измеренному доплеровскому сдвигу частот специалисты США разработали графики изменения сдвига частоты по времени, составленные для различных скоростей сближения ИСЗ и объекта. Однако этого, по мнению иностранных специалистов, оказалось недостаточно для определения местоположения объекта с помощью системы NNSS, поскольку нужна ещё точная привязка графика к единому времени. Метод определения местоположения объекта показан на рис. 1.

Рис. 1. Принципиальная схема для определения местоположения объекта с помощью системы NNSS: 1 — положение ИСЗ в момент пролёта им траверза; 2 — орбита ИСЗ; 3 — проекция орбиты ИСЗ на поверхности Земли; 4 — линия траверза.
При уменьшении расстояния между спутником и объектом (например, подводной лодкой) доплеровский сдвиг положителен и постепенно уменьшается, становясь равным нулю в момент прохождения спутником траверза объекта. Линией траверза называется воображаемая прямая линия, на которой находятся объект и ИСЗ в момент, когда расстояние между ними минимально. После прохождения ИСЗ линии траверза доплеровский сдвиг становится отрицательным. Крутизна кривой зависимости доплеровского сдвига от времени (положения А, В, С на рис. 1) определяется быстротой изменения относительной скорости (скорости перемещения ИСЗ относительно объекта). Чем дальше расположен объект от линии проекции орбиты ИСЗ на земную поверхность, тем меньше его относительная скорость, а значит, и крутизна кривой на графике. Относительная скорость будет максимальна в том случае, если проекция орбиты спутника на земную поверхность пройдёт через точку расположения объекта (ИСЗ пролетит над объектом). Таким образом, крутизна доплеровской кривой на графике является мерой расстояния от объекта до точки D (проекция ИСЗ на поверхность Земли в момент прохождения им траверза).
Для определения направления от объекта на точку D точно засекают момент времени, когда доплеровский сдвиг станет равным нулю (момент to). Затем по параметрам орбиты ИСЗ (высота, угол наклона орбиты, точки апогея и перигея, размеры полуосей и т. д.) проводят на карте линию проекции орбиты спутника на земную поверхность и, зная положение ИСЗ в каждый момент времени, наносят на эту линию точку D (положение ИСЗ в момент to).
После этого на карте проводится перпендикуляр в точке D к линии проекции орбиты ИСЗ и на нем откладывается расстояние до объекта, полученное из графика зависимости доплеровского сдвига от времени. Так как перпендикуляр можно провести в обе стороны от линии проекции спутника, то получаются две точки, в которых может находиться объект. Для однозначного определения координат объекта используется дополнительная навигационная аппаратура (компас, астронавигационные средства и т. д.).
Для определения координат объекта достаточно одного ИСЗ, однако в этом случае между сеансами приёма сигналов с ИСЗ будут чрезмерно большие временные интервалы. Для сокращения этих интервалов в системе NNSS используются несколько спутников. Так, при нахождении на орбитах четырёх ИСЗ интервалы времени в зависимости от широты местоположения объекта составляют: около 90 мин. на экваторе, 68 мин. на широте 30° и 36 мин. на широте 60°.
В состав системы NNSS входят три группы оборудования:
- наземный комплекс;
- приёмо-передающее оборудование, установленное на ИСЗ;
- оборудование, установленное на объектах.

Рис. 2. Состав и принципиальная схема действия системы NNSS: 1 — положение ИСЗ в момент времени t1; 2 — положение ИСЗ в момент времени t2; 3 — положение ИСЗ в момент времени t3; 4 — орбита ИСЗ; 5 — доплеровские сигналы поступают от ИСЗ на станцию слежения; 6 — данные, полученные от ИСЗ, в дискретной форме поступают от станции слежения в вычислительный центр; 7 — сигналы параметров орбит и коррекции времени от станции ввода данных поступают в приёмную аппаратуру ИСЗ; 8 — вычислительный центр посылает обновлённые данные параметров орбит на станцию ввода данных; 9 — станция ввода данных; 10 — вычислительный центр; 11 — станция слежения; 12 — полученные координаты объекта (долгота, широта); 13 — ЭВМ; 14— приёмная аппаратура объекта; 15 — навигационные сигналы, параметры орбит ИСЗ, время и другая информация принимаются приёмной аппаратурой объекта.
Аппаратура станции слежения на ИСЗ принимает, регистрирует и превращает доплеровские сигналы из аналоговой в цифровую форму. Эти данные каждая станция передаёт в вычислительный центр, где на основе их анализа автоматически рассчитываются параметры орбит ИСЗ на ближайшие 12—16 час. и вносится коррекция частоты доплеровских сигналов на ионосферную рефракцию. Затем вся информация передаётся на станцию ввода данных, дополняется сигналами коррекции точного времени и в виде команд посылается на ИСЗ. Принятая спутником информация вводится в его запоминающее устройство, обновляя принятые ранее данные.
Станции слежения за ИСЗ системы NNSS расположены в Перл-Харборе (Гавайские о-ва), в Миннеаполисе (штат Миннесота) и Уинтер-Харборе (штат Мэн). Четвёртая станция слежения находится в Пойнт-Мугу (штат Калифорния), где размещены вычислительный центр, центр управления системой и станция ввода данных. Другая станция ввода данных расположена в Миннеаполисе.
Спутники системы NNSS выводятся на круговые полярные орбиты. Высота орбиты ИСЗ в среднем составляет 1100 км. В настоящее время используются пять оперативных спутников. Номера ИСЗ, даты их запуска и высоты орбит приведены в таблице (по состоянию на начало 1971 года).

Номера, даты запуска и высоты орбит ИСЗ системы NNSS
ИСЗ системы NNSS имеет форму цилиндра высотой 450 мм, диаметром 300 мм, его вес 60 кг. В качестве источников электропитания на ИСЗ используются солнечные батареи, заряжающие никеле-кадмиевые аккумуляторы. Для стабилизации положения спутника на орбите применяется специальная выдвижная штанга, ориентирующая антенну в направлении Земли. В состав электронного оборудования ИСЗ входит эталон частоты и времени, аппаратура для приёма команд от наземных станций ввода данных, передатчик навигационной информации и цифровое запоминающее устройство.
Передатчик навигационной информации генерирует посылки радиосигналов на частотах 150 Мгц и 400 Мгц. Одновременная работа на двух частотах используется для возможности устранения ошибок, возникающих в результате ионосферной рефракции. Каждая посылка имеет длительность 2 мин. и содержит сигналы точного времени, данные орбиты ИСЗ и навигационный сигнал. Цифровое запоминающее устройство ИСЗ служит для хранения расчётных параметров орбит. Каждые 12 час. эти данные обновляются по командам, поступающим от станции ввода данных. Однако система рассчитана таким образом, что обновление данных дважды в сутки не является обязательным. Функционирование системы NNSS при некотором снижении точности возможно и без выполнения указанной процедуры. Поэтому даже вывод из строя всех наземных станций не означает одновременного выхода из строя всей системы NNSS.
В иностранной печати отмечается, что точность определения координат объекта зависит в основном от характеристик применяемой на объекте аппаратуры и находится в пределах 200 — 2000 м.
Аппаратура AN/SRN-9 более проста, навигационные расчёты по её данным производятся штурманом. Для определения координат объекта с помощью аппаратуры AN/SRN-9 должно быть принято не менее трёх посылок сигналов от ИСЗ.
Аппаратура МХ/702/hp состоит из приёмника сигналов от ИСЗ, ЭВМ типа 2114, печатающего устройства и антенны с предварительным усилением сигналов. Антенна устанавливается на мачте корабля. ЭВМ имеет запоминающее устройство на 8192 слова, в которое заранее вводится навигационная программа, день месяца, время суток, примерные географические координаты, курс, скорость корабля и высота антенны относительно поверхности опорного эллипсоида Земли. Аппаратура работает автоматически. При поступлении сигналов от ИСЗ фиксируется их доплеровский сдвиг на обеих частотах каждой посылки (150 Мгц и 400 Мгц). После окончания сеанса приёма ЭВМ на основе полученных от ИСЗ сигналов и с учётом данных, хранящихся в запоминающем устройстве, определяет местоположение корабля в географических координатах.
Аппаратура AN/WRN-4 по своим основным характеристикам аналогична аппаратуре МХ/702/hp, однако выполнена более компактной в виде единого блока, на передней панели которого с помощью цифровых счётчиков отображаются координаты корабля. Вышеприведённые типы аппаратуры используются для решения навигационных задач при проведении океанографических работ, поиске полезных ископаемых, прокладке телефонного трансатлантического кабеля. Эту аппаратуру можно устанавливать также и на подводных лодках.
Аппаратура AN/PRR-14 предназначена для использования в ВВС, ВМС и сухопутных войсках США при проведении геодезических работ, она отличается сравнительно высокой точностью определения координат (30—40 м). Аппаратура включает приёмник радиосигналов и записывающее устройство с перфолентой, работает на частотах 150 Мгц и 400 Мгц системы NNSS, а также на частотах 162 Мгц и 324 Мгц передатчиков геодезических спутников. Данные, записанные на перфоленту, передаются в вычислительный центр, аппаратура которого рассчитывает координаты в момент приёма сигналов от спутников системы NNSS.
Общий вид аппаратуры AN/PRR-14, МХ/702/hp и AN/WRN-4 показан на рис. 3.

Рис. 3. Общим вид приёмной аппаратуры системы NNSS: 1 — аппаратура AN/WRN-4; 2 — аппаратура МХ/702/hp (с антенной, расположенной левее); 3 — аппаратура AN/PRR-14.

Рис. 4. Прибор авианаводчика типа AN/PRN-7.
Как отмечается в иностранной печати, для навигации самолётов система NNSS должного применения до настоящего времени не получила. Основная причина заключается в больших временных интервалах между поступлением сигналов от спутников, равных в среднем 60 — 90 мин. Поэтому американские специалисты считают, что использование системы в авиации имеет смысл в тех случаях, когда продолжительность полёта самолёта составляет 5 час. и более. При этом предполагается использовать информацию, получаемую от ИСЗ, для коррекции автономной инерциальной системы самолёта или его доплеровской радиолокационной станции. Проведённые испытания показали, что при таком методе навигации координаты самолёта определяются с точностью до 350—600 м.
В целом, по мнению иностранных специалистов, спутниковая система радионавигации NNSS является достаточно точной, надёжной и живучей. Вместе с тем они отмечают такой существенный недостаток этой системы, как дискретность получения данных от ИСЗ, что исключает её применение в тактической авиации. Другим недостатком системы является длительность определения местоположения объекта, так как нужно следить за сигналами ИСЗ все время, пока он находится в поле видимости объекта.
В состав бортового корабельного оборудования системы NNSS обычно входит ЭВМ. Это, как утверждается в иностранной печати, даёт возможность создать на базе ЭВМ комплексную навигационную систему корабля, значительно повышающую точность навигации, и компенсировать такой существенный недостаток системы NNSS, как большие временные интервалы получения данных от ИСЗ. В состав комплексной навигационной системы, помимо аппаратуры системы NNSS, входит гирокомпас, гировертикаль, доплеровская гидроакустическая станция, печатающее устройство и аппаратура отображения данных на планшете и индикаторе.
Основным элементом системы является ЭВМ, ведущая непрерывное счисление пути по данным доплеровской станции и гирокомпаса. Повышение точности навигационной системы предполагается достичь взаимной корректировкой отдельных её элементов. Считается, например, что точное знание скорости корабля в момент приёма сигналов от ИСЗ повысит точность определения его местоположения. В свою очередь точное знание координат корабля будет использовано для коррекции данных счисления его пути.
В американской прессе отмечается, что в будущем не предполагаются значительные изменения в системе NNSS. Работы, ведущиеся по её модернизации, направлены на увеличение силы принимаемых сигналов, повышение надёжности аппаратуры и снижение влияния тормозящего действия атмосферы на полёт ИСЗ.
Одновременно с модернизацией системы NNSS в США проводятся работы по созданию новых спутниковых систем радионавигации. В иностранной печати отмечается, что командование вооружённых сил США предполагает в будущих системах навигации с использованием ИСЗ устранить основные недостатки системы NNSS: дискретность поступления данных от ИСЗ и невозможность определения высоты полёта самолёта. Новая разрабатываемая система, получившая наименование DNSS (Defense Navigation Satellite System), должна обладать широкими тактическими возможностями, её намечают использовать во всех видах вооружённых сил США. В системе предполагается применить другие методы получения навигационных данных — дальномерный или разностно-дальномерный. Диапазон частот 1500—1700 Мгц.

В этой статье мы расскажем про глобальные системы позиционирования, разработанные в США, России, ЕС и Китае; объясним, как поддержка технологий глобальной спутниковой навигации реализована в электронных устройствах, а также опишем ключевые и дополнительные функции современных навигационных приемников.

Система GPS (Global Positioning System) создавалась для применения в военных целях. Она начала работать в конце 80-х — начале 90-х годов, однако до 2000 года искусственные ограничения на определение местоположения существенно сдерживали ее возможности использования в гражданских целях.
- Определение точного местоположения
- Навигация, движение по маршруту с привязкой к карте на основании реального местоположения
- Синхронизация времени
Орбиты спутников системы GPS. Пример видимости спутников из одной из точек на поверхности Земли. Visible sat — это число спутников, видимых над горизонтом наблюдателя в идеальных условиях (чистое поле).
ГЛОНАСС

Российский аналог GPS — ГЛОНАСС (глобальная навигационная спутниковая система) — была развёрнута в 1995 году, но в связи с недостаточным финансированием и малым сроком службы спутников она не получила широкого распространения. Вторым рождением системы можно считать 2001 год, когда была принята целевая программа ее развития, благодаря которой ГЛОНАСС возобновил полноценную работу в 2010 году.
Сегодня на орбите работают 24 спутника ГЛОНАСС, они охватывают навигационным сигналом весь земной шар.
Новейшие потребительские устройства используют GPS и ГЛОНАСС как взаимодополняющие системы, подключаясь к ближайшим найденным спутникам, это значительно увеличивает скорость и точность их работы.

Пример: aвтомобильное GPS/ГЛОНАСС-навигационно-связное устройство на базе ОС Android, разработанное командой Promwad по заказу российского конструкторского бюро. Реализована поддержка GSM/GPRS/3G. Устройство автоматически обновляет информацию о дорожной обстановке в режиме реального времени и предлагает водителю оптимальный маршрут с учётом загруженности дорог.
Сейчас на стадии разработки находятся еще две спутниковые системы: европейская Galileo и китайская Compass.
Galileo

Галилео — совместный проект Европейского союза и Европейского космического агентства, анонсированный в 2002 году. Изначально рассчитывали, что уже в 2010 году в рамках этой системы на средней околоземной орбите будут работать 30 спутников. Но этот план не был реализован. Сейчас предположительной датой начала эксплуатации Galileo считается 2014 год. Однако ожидается, что полнофункциональное использование системы начнется не ранее 2020 года.
Compass

Это следующая ступень развития китайской региональной навигационной системы Beidou, которая была введена в эксплуатацию после запуска 10 спутников в конце 2011 года. Сейчас она обеспечивает покрытие в границах Азии и Тихоокеанского региона, но, как ожидается, к 2020 году система станет глобальной.

Сравнение орбит спутниковых навигационных систем GPS, ГЛОНАСС, Galileo и Compass (средняя околоземная орбита — MEO) с орбитами Международной космической станции (МКС), телескопа Хаббл и серии спутников Иридиум (Iridium) на низкой орбите, а также геостационарной орбиты и номинального размера Земли.
Поддержка ГНСС
- Smart Antenna — модуль, состоящий из керамической антенны и навигационного приемника. Преимущества: компактность, не требует согласования, удешевляет разработку за счет сокращения сроков.
- MCM (Multi Chip Module) — чип, включающий все компоненты навигационного приемника.
- OEM — экранированная плата, включающая ВЧ интерфейсный процессор и процессор частот основной полосы (RF-frontend + baseband), SAW-фильтры и обвязку. Это наиболее популярное решение на данный момент.
Ключевые параметры навигационных приемников
- Сигналы от спутников
- Альманах — информация о приблизительных параметрах орбит всех спутников, а также данные для калибровки часов и характеристики ионосферы
- Эфемериды — точные параметров орбит и часов каждого спутника
Производители приемников используют различные методы уменьшения TTFF, включая скачивание и сохранения альманаха и эфемерид по беспроводным сетям передачи данных (т.н. метод Assisted GPS или A-GPS), это быстрее чем извлечение этих данных из сигналов ГНСС.
Холодный старт описывает ситуацию, когда приемнику нужно получение всей информации для определения места. Это может занять до 12 минут.
Теплый старт описывает ситуацию, когда у приемника есть почти вся необходимая информация в памяти, и он определит место в течении минуты.
Одним из ключевых параметров навигационных модулей в мобильных устройствах является энергопотребление. В зависимости от режима работы модуль потребляет различное количество энергии. Фаза поиска спутников (TTFF) характеризуется большим, а слежение меньшим энергопотреблением. Также производители реализуют различные схемы уменьшения энергопотребления, например, путем периодического перевода модуля в режим сна.
Как правило, все модули выдают данные по текстовому протоколу NMEA-0183, но кроме указанного текстового протокола каждый производитель имеет свой собственный двоичный протокол (Binary), который позволяет изменять конфигурацию модуля под конкретное использование либо получать доступ к дополнительному функционалу, а также доступ к сырым измерениям. Двоичный протокол удобен для использования на микроконтроллерах, т.к. при этом нет необходимости выполнять преобразование из текста в двоичные данные, тем самым экономя программную память путем исключения библиотеки работы со строками и времени на преобразование.
Стандарт NMEA-2000 — это развитие протокола NMEA-0183. В качестве физического уровня в NMEA-2000 используется CAN-шина, которая была выбрана в виду большей защищенности по сравнению с RS-232. С точки зрения протокола передачи данныхNMEA-2000 существенно отличается от своего предшественника, т.к. использует двоичный протокол, базирующийся на стандарте SAE J1939.
Частота обновления данных о местоположении и скорости всех модулей составляет 1 Гц, но при необходимости ее можно поднять до 5 или 10 Гц.
В зависимости от области применения модуль можно сконфигурировать под определенные динамические характеристики, которые он должен отслеживать (например, максимальное ускорение объекта). Это позволяет использовать оптимальный алгоритм и улучшать качество измерений.
Для выполнения навигационной задачи модуль должен одновременно принимать сигналы от нескольких спутников, т.е. иметь несколько приемных каналов. На сегодняшний день это число лежит в диапазоне от 12 до 88.
Точность определения местоположения по GPS составляет в среднем 15 м, она обусловлена используемым неточным сигналом, влиянием атмосферы на распространение радиосигнала, качеством кварцевых генераторов в приемниках и пр. Но с помощью корректирующих методов возможно улучшить точность определения местоположения. Эта технология называется Differential GPS. Существует два метода коррекции: наземный и спутниковый DGPS.
В наземных методах коррекции наземные станции дифференциальных поправок постоянно сверяют свое заведомо известное местоположение и сигналы от навигационных спутников. На базе этой информации вычисляются корректирующие величины, которые могут быть переданы с помощью УКВ- или ДВ-передатчика на мобильные DGPS-приемники в формате RTCM. На основании полученной информации потребитель может корректировать процесс определения собственного местоположения. Точность этого метода составляет 1—3 метра и зависит от расстояния до передатчика корректирующей информации и качества сигнала.
Спутниковые методы, такие как система WAAS (Wide Area Augmentation System), доступная в Северной Америке, и система EGNOS (European Geostationary Navigation Overlay System), доступная в Европе, шлют корректирующие данные с геостационарных спутников, таким образом достигается большая область приема, чем при наземных методах.
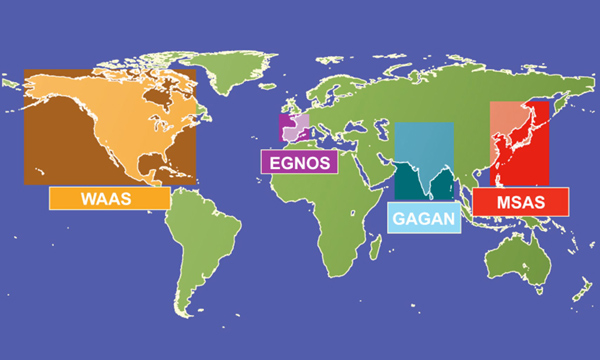
Спутниковые системы дифференциальной коррекции (SBAS — Space Based Augmentation Systems) позволяют улучшить точность, надежность и доступность навигационной системы за счет интеграции внешних данных в процессе расчета
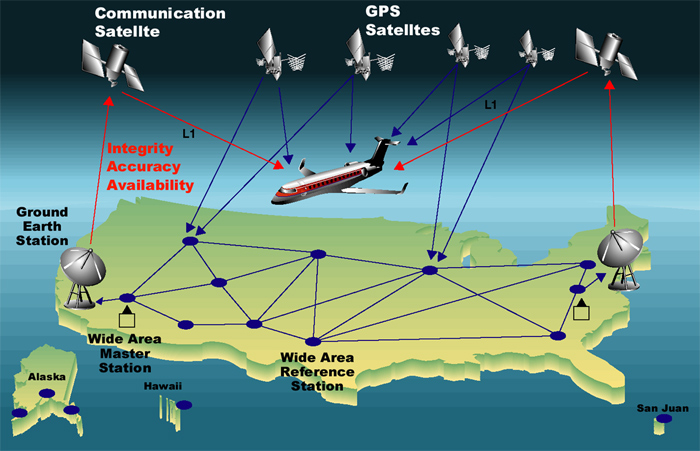
Демонстрация принципа работы системы WAAS (Wide Area Augmentation System) на территории США
Одним из основных параметров, влияющих на точность определения местоположения и стабильность приема является чувствительность. Она, как правило, определяется качеством малошумящего усилителя на входе приемника и сложностью реализованных алгоритмов цифровой обработки. Типовые значения современных приемников лежат в диапазоне 143 дБм для поиска и 160 дБм для слежения.
Кроме определения местоположения ГНСС предоставляют информацию о точном времени. Как правило, все приемники имеют выход PPS (pulse per second, импульсов в секунду) — секундная метка (1 Гц), которая точно синхронизирована с временной шкалой UTC.
Дополнительные функции навигационных устройств
Счисление пути. На основе информации о направлении движения и пройденном пути (предоставляется дополнительными датчиками) приемник может рассчитывать свои координаты при отсутствии сигналов от спутников (например, в туннелях, на подземных стоянках и в плотной городской застройке).
Некоторые модули имеют возможность напрямую подключать флэш-память (например, по SPI) к модулю для записи трека c необходимой периодичностью. Эта функция позволяет отказаться от использования отдельного микроконтроллера, либо она может быть полезной для минимизации энергопотребления (т.е. система на кристалле может находиться в состоянии сна).
На этом поверхностный обзор технологий глобальной спутниковой навигации завершен. Спасибо за внимание. Примеры реализованных проектов на базе этих ГЛОНАСС и GPS можно посмотреть на странице разработок компании Promwad.

Системы GPS слежения
GNSS – это спутниковая навигационная технология, использующаяся для ориентирования на местности и отслеживания объектов. С ее помощью можно определить координаты независимо от времени суток и погодных условий. Благодаря этой системе всю информацию можно получать без видимых ориентиров за короткое время и с высокой точностью. Спутниковые программы мировых стран работают в рамках ГНСС.
Общая характеристика GNSS
ГНСС, или глобальные навигационные спутниковые системы, передают информацию о расположении, времени и скорости пользующимся определенными приборами пользователям на Земле, в воздухе или космическом пространстве. Чтобы реализовать функции системы, используют спутники, которые выполняют измерение местоположения с точностью до метра.
Предназначение
Изначально технология разрабатывалась для отслеживания военных объектов. Позже для сигнала, получаемого от спутников, нашли применение в обычной жизни. Он облегчает передвижение на земле, в воздухе, водном пространстве. С помощью спутниковых систем выясняют также скорость, направление движения объекта. Еще они обеспечивают определение точного времени.
Функционирование технологии достигается устройствами управления, расположенными на Земле и в космосе. Регулярно специалисты осуществляют оценку точности ГНСС-наблюдений для повышения качества информации.
Принцип работы
Навигационные системы измеряют расстояние от антенны на объекте до спутника, положение которого точно известно. Информация о местонахождении последних внесена в таблицу, которую называют альманахом. Приемник сохраняет данные в памяти и использует их для работы.
Каждый сигнал спутника включает передачу и всего альманаха. Благодаря информации о расстоянии до нескольких спутников и применению геометрических построений оборудование вычисляет положение объекта. Измеряться данные будут с высокой точностью за счет того, что скорость движения радиоволн известна.
Чтобы определить время, которое распространяет радиосигнал, все спутниковые системы излучают сигналы с использованием атомных часов. Они синхронизируются с системным временем. Эта информация позволяет определить координаты антенны.
Основные составляющие
ГНСС состоит из нескольких элементов:
- спутников, двигающихся по орбите;
- оборудования на Земле для контроля работы и управления;
- спутниковых навигаторов;
- радиомаяков, обеспечивающих точные координаты;
- радиосистем, передающих поправки пользователям.
Обзор действующих спутниковых систем навигации
Глобальными спутниковыми системами являются ГЛОНАСС (Россия) и GPS (США). Разработкой технологий занимаются также страны Европы, Китай, Индия. Их основное оборудование не достигло уровня американских систем, но специалисты трудятся над этим.

Спутниковые системы
Спутники транслируют сигнал с космоса, приемники используют его для вычисления координат и наблюдения за объектом в режиме реального времени. В технологии применяется 32 спутника, которые вращаются по орбите Земли.
ГЛОНАСС
С помощью системы определяют расположение и скорость движения авиации, морского, наземного и космического транспорта. Испытание оборудования и строительство спутников начали в 1995 году, но недостаточное финансирование не позволило ГЛОНАСС обрести глобальный характер.
Полноценное функционирование началось в 2010 году. Сейчас спутники активно взаимодействуют с GPS. Они подключаются к ближайшим объектам, что увеличивает скорость работы, точность.
DORIS
Преимущество технологии – в высокоточном определении орбиты и отслеживании маяков. Это система микроволнового слежения, основанная на принципе Доплера. Цель ее работы – измерения для услуг POD и приложений геодезии. Также она способна в один заход определить координаты орбит, осуществить геофизическое моделирование и позиционирование наземных маяков.
Beidou
Это китайская технология для осуществления геодезических, метрологических и других наблюдений за объектом. Оборудование включает около 38 спутников. Планируется, что на полную мощность система выйдет в 2020 году, поэтому ее характеристики стараются улучшить. Обеспечивает геометрическую сеть GNSS-наблюдений.
Galileo
Использование системы распространено среди обычных граждан и служб стран Европы. Отличие от ГНСС США и России в том, что ее не контролируют национальные военные ведомства. Но допускается возможность использовать сигнал для операций для обеспечения политики безопасности.
К сведению. Регулярно выполняется поверка работы оборудования. Оно обеспечивает точность до метра, а временная погрешность составляет миллиардную долю секунды.
В перечисленных технологиях пользуются различными, чаще национальными, системами координат.
| Навигационная система | Система координат |
| ГЛОНАСС | ПЗ-90 (Параметры Земли 1990 года) |
| GPS | WGS-84 (World Geodetic System) |
| Система координат ГАЛИЛЕО | GTRF (Galileo Terrestrial Referenfce Frame) |
| БЕЙДОУ | CGCS2000 (China Geodetic Coordinate System 2000) |
Региональные спутниковые навигационные системы
Основное преимущество использования спутниковых ГНСС-технологий заключается в повышенной точности определения местонахождения объектов, скорости движения и времени. Существуют также региональные системы:
- IRNSS. Это индийская программа, которая подходит для эксплуатации только на территории страны. Технические параметры не позволяют охватывать большую площадь и частоту. Система состоит из пяти спутников.
- QZSS. Среди услуг, оказываемых японской технологией: подвижная связь, вещание и использование для навигации.
Планируется создание трех группировок, посадка которых предполагается на геосинхронные орбиты.
Поддержка ГНСС
Чтобы в айфонах и смартфонах функционировала технология ГНСС, в электронных устройствах должны присутствовать приемники определенного типа:
- Смарт-антенны. Датчик состоит из керамической антенны и навигационного приемника. Это компактный вариант, не требующий согласования.
- MCM. Это чип, в комплект с которым входят все элементы навигационных приемников.
- ОЕМ. Представляет собой экранированную плату с интерфейсным процессором и процессором частот.
Включение всех измерений технологии ГНСС не занимает много времени, настройка заключается в подключении к микроконтроллеру или системе на кристалле по соответствующему интерфейсу. В автомобилях эту функцию регистрации выполняет тахограф.
Ключевые параметры GNSS-приемников
Расшифровка требуемых показателей возможна после того, как приемник получит данные о:
- сигналах со спутника;
- альманахе, в котором указаны приблизительные параметры орбит всех спутников;
- эфемеридах, точных параметрах орбит и часов всех спутников.
Оценка характеристик зависит от TTFF. Этот параметр показывает, за какой период времени приемник найдет сигнал от спутника и определит координаты. Если это новое устройство, оно было отключено или длительное время перевозилось, после включения получить необходимые данные сразу невозможно.
Чтоб улучшить этот показатель и повысить эффективность циклического процесса, производители устанавливают возможность скачать и сохранить альманах и эфемериды по беспроводной сети передачи данных. Это занимает меньше времени, чем если извлекать показания из сигналов ГНСС. Скачивание доступно бесплатно.
Встречаются конфигурации с динамическими характеристиками. Например, он помогает узнать показатели ускорения объекта. Эти элементы часто имеют пару приемных каналов. Их число достигает 88.
Методы ГНСС-наблюдений
Расположение по спутниковым системам определяется с высокой точностью до 15 м. Такие показатели связаны с воздействием атмосферных явлений на распространение радиосигнала, уровнем качества кварцевого генератора в приемнике.
Различаются следующие методы наблюдений: абсолютный, относительный. В первом случае положение приемника определяется по пространственной засечке. При этом нужно знать координаты хотя бы 4 спутников, величину псевдодальности. Точность измерений составляет 3–15 м.
При относительном методе (DGPS) для наблюдений используется 2 приемника. Один находится в месте с известными координатами, другой – на определяемом. При этом рассчитывается псевдодальность, поправка передается на ровер. Метод подходит для решения задач в геодезии.
При обоих методах наблюдения используются постобработка, определение координат в реальном времени. В первом случае необходимы ПК, специальная программа. При определении координат в реальном времени обработка осуществляется сразу, в управляющем микропрограммном обеспечении приемника.
В настоящее время GNSS оборудование используется в военной сфере, геодезии и картографии.
Читайте также: