
Цифровое проектирование и моделирование доклад
Обновлено: 18.05.2024
Внедрение микропроцессорной, и вообще цифровой, техники в устройства управления промышленными объектами требует от специалистов самого различного профиля быстрого освоения этой области знания. В процессе разработки функциональных схем цифровых устройств отчетливо выделяются два характерных этапа. На первом этапе, который можно назвать структурным проектированием, заданный неформально алгоритм разработчик представляет в виде последовательности некоторых операторов, таких, как получение результата, счет, преобразование кода, передача информации. При этом он старается использовать ограниченный набор общепринятых операторов. При использовании этих операторов, как правило, алгоритм можно представить довольно небольшим их числом. Структура алгоритма становится обозримой, понятной, легко читаемой и однозначной. На основе полученной структуры алгоритма формулируются технические требования к схемам, реализующим отдельные операторы. По техническим требованиям в качестве функциональных узлов схемы можно применить либо готовые блоки в интегральном исполнении, либо, если таких микросхем в наличии нет, синтезировать их из более простых элементов. Подобный синтез первоначально производится при помощи алгебры логики, после чего по полученным функциям строится эквивалентная схема. Однако, как правило, синтезированные схемы хуже их аналогов в интегральном исполнении. К этому приводят следующие обстоятельства: большее время задержки, большие габариты, большее потребление энергии. Поэтому результативного проектирования цифровых устройств разработчик должен уметь: выбрать наиболее приемлемый вариант решения поставленной задачи, работать с алгеброй логики, знать основные цифровые элементы и уметь их применять, по возможности знать наиболее простые и распространенные алгоритмы решения основных задач. Знание наиболее распространенных инженерных приемов в проектировании устройств позволит в будущем сразу воспользоваться готовой схемой, не занимаясь бесполезной работой. Необходимо заметить, что реализация схемы гораздо сложнее, чем простое решение задачи в алгебре логики и наборе полученной функции из логических элементов. В действительности даже, казалось бы, самые простые элементы, необходимо включать по определенной схеме, знать назначения всех выводов. Необходимо знать, чем различаются элементы в пределах серии. Понимание внутренней логики микросхемы особенно важно именно для специалистов по автоматике и промышленной электронике, поскольку цифровые микросхемы изначально создавались для выполнения строго определенных функций в составе ЭВМ. В условиях автоматики и радиотехники они часто выполняют функции, не запланированные в свое время их разработчиками, и грамотное использование микросхем в этих случаях прямо зависит от понимания логики их работы. Хорошее знание тонкостей функционирования схем узлов становится жизненно необходимым при поиске неисправностей, когда нужно определить, имеется ли неисправность в данном узле или же на его вход поступают комбинации сигналов, на которые схема узла не рассчитана. Составление тестов, а тем более разработка само проверяемых схем также требуют очень хороших знаний принципов работы узлов.
1.1 Разработка структурной схемы устройства
В состав структурной схемы войдут следующие элементы:
· Схема подсчета тактовых импульсов
· Схема преобразования параллельного кода в последовательный
Структурную схему можно представить так, как отображено на рисунке 2.
 |
Рисунок 1. Структурная схема
При поступлении переднего фронта измеряемого импульса детектор фронтов (ДФ) формирует управляющий сигнал на начало счета. Формируемые тактовым генератором (ТГ) импульсы поступают на схему подсчета тактовых импульсов (СУ). При поступлении заднего фронта измеряемого импульса ДФ формирует сигнал останавливающий .счет. При этом количество подсчитанных импульсов выводится на схему отображения (УО) и через схему преобразования параллельного кода в последовательный (ПК) в устройство обработки.
1.2 Разработка функциональной схемы устройства
Детектор фронтов состоит из двух ждущих мультивибраторов и триггера. Один ждущий мультивибратор предназначен для выделения заднего фронта импульса и сбрасывает триггер. Другой ждущий мультивибратор предназначен для выделения переднего фронта импульса и переключает триггер в единичное состояние и вырабатывает сигнал сброса счетчика. Оба мультивибратора вырабатывают импульсы длительности необходимой для надежного переключения триггера.
Схема отображения содержит регистр, дешифратор и индикаторы. Использование регистра позволяет избежать мерцания во время подсчета. Запись в регистр выполняется только по окончанию подсчета длительности импульса. Дешифратор необходим для преобразования двоично-десятичного кода в код обеспечивающий отображение соответствующей цифры.
 |
Рисунок 2. Функциональная схема
Схема преобразования параллельного кода в последовательный состоит из преобразования кода 8421 в код 8421+3 и сдвигового регистра обеспечивающего преобразование параллельного кода в последовательный.
В состав тактового генератора входит генератор прямоугольных импульсов заданной частоты и делитель частоты для сдвигового регистра.
Определим разрядность индикатора по формуле:

,
где - максимальное значение измеряемой величины; -точность измерения.

Разрядность регистра с параллельным вводом и последовательным выводом информации определим исходя из того, что для отображения каждого десятичного разряда требуется 4 бита:

2.1 Проектирование схемы детектора фронтов
Рисунок 6. Схема детектора фронтов
 |
Ждущий мультивибратор можно реализовать на основе микросхемы К155АГ3. Она содержит два ждущих мультивибратора с возможностью перезапуска. Каждый мультивибратор содержит выходы и , вход сброса и два входа запуска: - прямой и - инверсный, с активным низким уровнем.
Длительность импульса (при ) вычислим по формуле:

.
Паразитная емкость вывода RT на землю около 50пФ, поэтому максимальное время выходного импульса 40нс.
Потребляемый микросхемой К155АГ3 ток составляет 66мА, стекающий коллекторный ток выводов может быть до 40мА.
Триггер можно реализовать на основе микросхемы К555ТР2. Она содержит 4 независимых RS - триггера, имеющих общую шину питания. У каждого триггера есть входы и , а также комплиментарный выход .
2.2. Генератор тактовых импульсов
Рисунок 7. Схема тактового генератора
 |

Для работы счетчика и сдвигового регистра необходим генератор тактовых импульсов. Схема генератора приведена на рисунке 7. Он построен на двух элементах И-НЕ микросхемы К155ЛА3. Частота генерации определяется из соотношения:

,

где НОК - наименьшее общее кратное,

- точность измерения,
- скорость передачи.

Частота генерации определяется как:

.

Приняв , определим номинал резистора:



Примем значение из номинального ряда .
Для получения частот в 10000Гц и 1200Гц необходимо применить делители частоты. В качестве делителей удобно использовать счетчики К155ИЕ2 и К155ИЕ4. Для реализации деления на 5 используем счетчик К155ИЕ2 (DA3) подавая тактовые импульсы на вход C1 на выходе Q1 получим частоту деленную на 5. Для реализации деления на 6 используем счетчик К155ИЕ4.
2.3 Схема подсчета тактовых импульсов
Рисунок 8. Схема подсчета тактовых импульсов
 |
2.4 Схема преобразования параллельного кода в последовательный
Рисунок 9. Схема преобразования

Для реализации схемы преобразования параллельного кода в последовательный выберем параллельно-последовательный регистр сдвига с параллельной записью данных К155ИР1. К155ИР1 - четырехразрядный сдвиговый регистр.

Если на вход подано напряжение низкого уровня, то разрешается работа тактовому входу С1. Отрицательные фронты последовательности тактовых импульсов сдвигают данные от последовательности входа S1 на выход Q0, затем на Q1,Q2,Q3, т.е. вправо.
Для построения 12 разрядного регистра сдвига необходимо соединить 3 регистра последовательно, причем выход Q3 предыдущего регистра соединяется со входом S1 последующего.
2.5 Схема управления
 |
Рисунок 10. Схема управления
Для согласования отдельных узлов устройства необходима схема управления. В ее функции входит следующее:
· Управление записью данных в регистры сдвига
· Управление сдвигом данных записанных в регистры сдвига
· Прекращение передачи данных в устройство обработки после передачи 12 разрядов
Анализ вышесказанного, позволяет сделать следующие выводы о необходимых компонентах схемы управления:
1. Для управления сдвигом потребуется счетчик с пересчетом до 12
2. Для прекращения передачи потребуется электронный ключ на триггере
3. Для согласования по времени переключения логических элементов потребуются элементы задержки.
Предлагаемая схема управления изображена на рисунке 10.
 |
Рисунок 11. Временные диаграммы работы устройства
При выполнении данной курсовой работы были проведены расчет и построение узлов и комбинационных схем.
Учитывались основные параметры влияющие на работу цифрового устройства. Был произведен синтез структурной, функциональной и электрической принципиальной схем заданного устройства, выбраны и обоснованы критерии подбора интегральных микросхем, проведена их сравнительная оценка.
2. Шило В.Л. Популярные цифровые микросхемы: справочник, - Москва; металлургия, 1988,-352 с.
3. Орнадский П.П. Автоматические измерения и приборы. - К.; Техника,1990 - 448с.
4. Цифровые и аналоговые интегральные микросхемы: Справочник / С.В.Якубовский, Л.И.Нильсон, В.И.Кулешова и др./ Под ред. С.В.Якубовского.-М.: Радио и связь, 1990.-496с.
Проектирование цифровых устройств, выполняющих операции с плавающей точкой, а также проектирование и моделирование микропрограммных устройств управления с жесткой и программируемой логикой. Моделирование с использованием пакета PCAD на ПЭВМ типа IBM PC.
| Рубрика | Программирование, компьютеры и кибернетика |
| Вид | методичка |
| Язык | русский |
| Дата добавления | 28.06.2009 |
| Размер файла | 609,7 K |
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Министерство общего и профессионального образования Российской Федерации
Пензенский государственный технический университет
Н.П. Вашкевич, А.П.Захаров
Проектирование и моделирование микропрограммных цифровых устройств
Рассмотрены методы проектирования цифровых устройств, выполняющих операции с плавающей точкой, а также проектирование и моделирование микропрограммных устройств управления с жесткой и программируемой логикой. Моделирование выполняется с использованием пакета PCAD на ПЭВМ типа IBM PC.
Методические указания подготовлены на кафедре ”Вычислительная техника” Пензенского государственного технического университета и предназначены для студентов специальности 2201 и ряда смежных специальностей, занимающихся вопросами проектирования устройств вычислительной техники. Материалы указаний могут быть использованы в курсовом проектировании по дисциплинам ”Прикладная теория цифровых автоматов”, ”Схемотехника”, а также при выполнении лабораторных работ по курсам ”Моделирование” и ”Основы комплексной автоматизации проектирования”.
Рецензент Р.А.Бикташев, канд. техн. наук, зав. кафедрой ”Вычислительные машины и системы” Пензенского. технологического ин-та.
- 1.1 Операционный автомат с непосредственными связями
- 1.2 Микрооперации, реализуемые в операционном автомате с непосредственными связями
- 1.3 Операционный автомат с магистральной структурой
- 3.1 Моделирование микропрограммного устройства с программируемой логикой
- 4.1 Абстрактный синтез управляющего автомата
- 4.2 Структурный синтез управляющего автомата.
- 4.3 Моделирование управляющего автомата с жесткой логикой
Постоянно расширяющаяся сфера применения микропроцессорной техники требует разработки новых, более производительных средств обработки данных. Развитие данного направления связано как с разработкой сопроцессоров, использующих плавающую арифметику, так и с совершенствованием устройств управления, обеспечивающих более эффективное использование систем обработки.
Данные методические указания закладывают основу для создания высокопроизводительных вычислительных систем использующих опе-рации с плавающей точкой, а также определяют методику проекти-рования микропрограммных устройств управления с жесткой и про-граммируемой логикой. Излагаемая методика поддерживается разра-ботанной на базе пакета PCAD системой моделирования, позволяющей оценить работоспособность и эффективность устройств управления, реализованных как на основе микропрограммы записанной в ПЗУ, так и реализованных аппаратно на элементах цифровой логики.
Операционные автоматы
На рис. 1 приведена классификация операционных автоматов.
Рис. 1 Классификация операционных автоматов
В данных методических указаниях изложена методика проектирования операционного автомата с плавающей точкой, а также методика проектирования и моделирования на ПЭВМ микропрограммных управляющих автоматов с магистральной организацией построенных с использованием программируемой и жесткой логики.
1.1 Операционный автомат с непосредственными связями
Для иллюстрации принципов выполнения основных микроопераций (МО), необходимых для реализации арифметических операций над двоичными числами, представленными в различных кодах с фиксированной и плавающей точкой, в работе используется упрощенная структура операционного автомата (ОА), имеющая минимальное число функциональных узлов. Для подобной структуры ОА рассматриваются условия выполнения микроопераций, их представление в операторах присваивания и состав осведомительных сигналов (признаков), которые могут возникнуть при выполнении конкретных микроопераций. Такая информация о микрооперациях и их реализации позволит значительно упростить разработку алгоритмов выполнения заданного набора макроопераций для конкретной заданной структуры операционного автомата.
В состав ОА (рис. 2) входит основной сумматор СМ комбинационного действия с регистром сумматора РСМ, входной регистр Р1, вспомогательный регистр Р2 и счетчик тактов СчТ. Регистр РСМ предназначен для хранения результатов сложения (вычитания) в сумматоре. Сумматор СМ имеет как прямые, так и инверсные информационные входы от входного регистра Р1 и от собственных выходов. В связи с последним обстоятельством регистр РСМ, как и другие регистры, реализован на двухступенчатых триггерах с соответствующей системой синхронизации. Управление входами сумматора СМ осуществляется управляющими сигналами, реализующими микрооперации сложения и вычитания. Регистр РСМ связан двоичной передачей при сдвиге влево и вправо с одноразрядным регистром РС и вспомогательным регистром Р2, участвующим в реализации операций умножения и деления.
Рис. 2 Cтруктура операционного автомата с непосредственными связями для операций над мантиссами чисел
Одноразрядный регистр РС предназначен для хранения переноса из старшего разряда СМ. Под действием управляющих сигналов в регистрах ОА могут выполняться операции записи и сдвига информации, а также приведение регистров в нулевое состояние. Предполагается, что записываемая в регистры ОА информация поступает из ОЗУ через соответствующую магистраль. На рис. ? введены следующие сокращенные обозначения для исходных чисел, записываемых в регистры ОА перед выполнением арифметических операций:
Хcл.1, Усл.2 - первое и второе слагаемые;
Хмн-е, Умн-ль , Уд-ль - множимое, множитель и делитель;
Xд.ст., Xд.мл. - старшая и младшая часть делимого.
Для выполнения операции умножения и деления в ОА используется счетчик тактов СчТ, в который перед соответствующими операциями заносится число тактов, равное числу разрядов в множителе или частном.
Так как структура ОА для выполнения арифметических операций над числами с фиксированной точкой и структура ОА для операций над мантиссами чисел с плавающей точкой ничем не отличаются друг от друга, за исключением необходимости сдвига информации в регистре Р1 для чисел с плавающей точкой, то в дальнейшем все записи микроопераций для чисел с плавающей точкой, представленные в операторах присваивания, будут иметь индекс ”м” для мантисс и индекс ”p” для порядков.
Структура ОА для операций с порядками двоичных чисел с плавающей точкой представлена на рис. 3. Эта структура является упрощенной копией структуры ОА, представленной на рис. ?. Обозначениям отдельных составляющих структуры ОА для действий над порядками чисел присвоен индекс ”p”. Максимальное и минимальное значения допустимых порядков для чисел с плавающей точкой имеют вид:
для ”классического” формата чисел с плавающей точкой Pmax.доп.=+(2m - 1), Pmin.доп.=-(2m - 1);
для формата в стандарте ”короткий вещественный” (КВ)
Pmax.доп.=127, Pmin.доп.= -126.
В структуры ОА (см. рис. 2, 3) входят также узлы формирования признаков осведомительных сигналов с соответствующими регистрами признаков РП.
Рис. 3 Структура операционного автомата с непосредственными связями для операций с порядками чисел
1.0.1 Перечень используемых осведомительных сигналов и сокращенных обозначений
С - сигнал переноса из старшего разряда основного сумматора. C=1, при единичном значении переноса, иначе C=0.
П - сигнал переноса в старший разряд основного сумматора. П=1 при единичном значении переноса, иначе П=0.
V - сигнал переполнения в основном сумматоре. V=1, если в результате операции происходит переполнение разрядной сетки основного сумматора, иначе V=0.
S - признак знака числа в РСМ. S=1, если старший разряд результата операции равен 1, иначе S=0.
Z - сигнал нуля. Z=1 при нулевом значении результата операции, иначе Z=0.
ОV- cигнал переполнения порядка числа. OV=1, если в результате операции происходит переполнение разрядной сетки сумматора порядков, иначе OV=0.
Un - сигнал антипереполнения порядка числа. Un=1, если порядок результата операции над порядками стал меньше минимально допустимой величины, иначе Vn=0.
HR - сигнал нарушения нормализации вправо. HR=1, если значения кодов цифр в знаковом разряде и в старшем разряде после запятой совпадают, иначе HR=0.
x0 - код знака делимого (множимого, уменьшаемого).
y0 - код знака делителя (множителя, вычитаемого).
z0 - код знака результата арифметических операций.
z1 - код цифры первого разряда результата операции в сумматоре.
РСМ(0)1 - значение нулевого разряда РСМ после первого пробного вычитания(сложения).
1.2 Микрооперации, реализуемые в операционном автомате с непосредственными связями
Сведения о микрооперациях и принципах их выполнения (в операционном автомате) при реализации отдельных арифметических операций, представлены в виде таблиц (1-6).
Сложение и вычитание чисел с фиксированной точкой
Наименование МО, условия ее выполнения и представление в операторах присваивания
Признаки, вырабатываемые в результате выполнения МО и комментарии
Запись исходных чисел в регистры ОА:
- числа в дополнительном коде
- модули исходных чисел
Запись модулей исходных чисел производится для организации сложения и вычитания чисел без знака, поэтому в знаковом разряде регистров устанавливаются нули
Сложение и вычитание исходных чисел в дополнительном коде:
- сложение целых чисел и простых дробей
- вычитание целых чисел и простых дробей
Сигнал переполнения разрядной сетки сумматора определяется по формуле
При V=1 фиксируется переполнение. Единица, представляющая младший разряд имеет вес: для целых - 20, для простых дробей - 2-n
Наименование МО, условия ее выполнения и представление в операторах присваивания
Признаки,вырабатываемые в результате выполнения МО и комментарии
Сложение и вычитание исходных чисел без знака по модулю ( для целых по модулю 2n, для простых дробей по модулю 20):
- сложение целых чисел и простых дробей
- вычитание целых чисел и простых дробей
Сигнал переполнения разрядной сетки определяется как в п. 2. При V=0 знак регистра сумматора определяет знак результата:
- при РСМ(0)=0 результат положительный;
- при РСМ(0)=1 результат отрицательный и представлен в виде дополнения до модуля (2n или 20)
Получение отрицательного результата в прямом виде:
- для целых чисел и простых дробей
См. комментарий в п.2
Сложение и вычитание чисел с плавающей точкой
Наименование МО, условия ее выполнения и представление в операторах присваивания
Признаки, вырабатываемые в результате выполнения МО и комментарии
Запись исходных чисел в регистры мантисс и порядков ОА:
Исходные числа представлены в дополнительном коде
Вычитание порядков исходных чисел:
При Px - Py=0 выполняется сложение или вычитание мантисс без их денормализации.
При Px - Py>0 производится денормализация мантиссы My.
При Px-Py Pmax.доп. и
Px - Py Pmax.доп. результату операции z присваивается значение слагаемого x
- при Px - Py 0 мантисса My сдвигается вправо на k разрядов My:=ARS(My,k).
Для реализации k сдвигов в СчТ заносится величина k = Px - Py, СчТ:= РСМp. После каждого сдвига мантиссы My вправо Р1м := ARS(Р1м,1), из СчТ вычитается единица СчТ := CчТ - 1
Результату сложения (вычитания) присваивается порядок первого слагаемого Pz = Px. В связи с этим после занесения в СчТ величины k порядок Px в РСМp восстанавливается путем выполнения операций:
РСМp := РСМp + Р1p
Наименование МО, условия ее выполнения и представление в операторах присваивания
Признаки,вырабатываемые в результате выполнения МО и комментарии
Денормализация слагаемого x. При Px-Py Pmax.доп. вырабатывается сигнал переполнения порядка OV=1;
Нормализация мантиссы результата Mz влево при HR=1 и коррекция его порядка:
Возможны особые случаи как в п.8.
Вычитание константы i из порядка результата осуществляется за i тактов: в каждом такте вычитается по единице; такты вычитания выполняются до тех пор, пока сигнал HR не станет равным нулю
Таблица 3
Умножение чисел с фиксированной точкой
Наименование МО, условия ее выполнения и представление в операторах присваивания
Признаки, вырабатываемые в результате выполнения МО и комментарии
Запись исходных чисел в регистры ОА:
- числа в прямом коде (модули чисел)
Р1:=x, Р2:=y;
- числа в дополнительном коде
Для чисел в прямом коде в знаковые разряды регистров устанавливаются нули
Проверка исходных чисел на нуль
В результате проверки на нуль при x=0 или y=0 вырабатывается сигнал нулевого результата
Установка регистров РС и РСМ в нуль:
Установка регистров РС и РСМ в нуль связана с тем, что в первом такте умножения осуществляется сложение множимого с нулем
Запись в счетчик тактов числа тактов умножения
Продолжение табл. 3
Наименование МО, условия ее выполнения и представление в операторах присваивания
Признаки, вырабатываемые в результате выполнения МО и комментарии
Определение кода знака произведения и его запись в регистр произведения:
- для чисел в прямом коде код знака частного определяется по формуле
z0=x0 y0 и заносится в разряд знака регистра РСМ после выполнения тактов умножения
РСМ(0):=z0 ;
- для чисел в дополнительном коде код знака частичного и окончательного произведения формируется после очередного сдвига по формуле
Для чисел в дополнительном коде код знака частичного и окончательного произведений формируется автоматически после каждого арифметического сдвига вправо и корректируется при переполнении в сумматоре: при V=1 код знака РСМ(0) меняется на обратный
Наименование МО, условия ее выполнения и представление в операторах присваивания
Признаки, вырабатываемые в результате выполнения МО и комментарии
Сложение в сумматоре для чисел в прямом и дополнительном коде производится в каждом такте умножения, если очередная цифра множителя равна единице РСМ:=РСМ+Р1 при Р2(n)=1
Для чисел в дополнительном коде после каждого сложения определяется сигнал переполнения в сумматоре, по которому корректируется код знака в регистре РСМ после очередного сдвига (см.п.5)
Сдвиг вправо в регистрах РС, РСМ и Р2 производится:
- в каждом такте умножения после сложения в сумматоре или при наличии очередной цифры множителя, равной нулю
РСМ:=ARS (РСМ,1);
Р2:=RS (Р2,1);
- в конце тактов умножения для целых чисел в дополнительном коде, если в Р2 был записан множитель со знаком: (n+1)-й сдвиг
Сдвиг вправо в регистрах РСМ и Р2 арифметический для чисел в дополнительном коде. После каждого сдвига значение кода знака в РСМ(0) корректируется (см. п.5).
Дополнительный (n+1)-й сдвиг обеспечивает для целых чисел установку произведения в регистрах РСМ и Р2 так, чтобы в n-м разряде регистра Р2 был зафиксирован его младший разряд. Для простых дробей (n+1)-й сдвиг не производится
Продолжение табл. 3
Наименование МО, условия ее выполнения и представление в операторах присваивания
Признаки, вырабатываемые в результате выполнения МО и комментарии
Вычитание из счетчика тактов единицы
Коррекция произведения для чисел в дополнительном коде производится для отрицательного множителя после n-го сдвига путем вычитания из суммы частичных произведений величины [x]2 2n
Такая коррекция возникает в связи с представлением отрицательного множителя в дополнительном коде
Таблица 4
Умножение чисел с плавающей точкой
Наименование МО, условия ее выполнения и представление в операторах присваивания
Признаки, вырабатываемые в результате выполнения МО и комментарии
Запись исходных чисел в регистры:
- числа в прямом коде
Р1м:=Mx Р2м:=My;
РСМp:=Px2 Р1n:=Py2 ;
- числа в дополнительном коде
Р1м:=[Mx]2 Р2м:=[My]2;
РСМp:=[Px]2;
Для чисел в прямом коде в знаковые разряды регистров устанавливаются нули
Наименование МО, условия ее выполнения и представление в операторах присваивания
Признаки, вырабатываемые в результате выполнения МО и комментарии
Проверка исходных чисел на нуль
Осуществляется так же как и для чисел с фиксированной точкой
Установка регистров РСм и РСМм в нуль
Другие микрооперации, связанные с умножением мантисс сомножителей, выполняются так же как и для чисел с фиксированной точкой для p=0
Мантисса произведения Mz может быть получена с нарушением нормализации вправо. Сигнал нарушения нормализации вправо HR=1 вырабатывается при z0=z1

Предисловие
Глобальная цифровая трансформация – уже давно не абстрактный тренд, а современная реальность, в полной мере определяющая развитие компаний и глобальных рынков. Программа Industrie 4.0 была предложена в Германии в 2011 году, но этому моменту предшествовала многолетняя работа, в ходе которой транснациональные высокотехнологичные компании, фактически, формировали технологический отрыв от конкурентов. Это означает, что для обеспечения конкурентоспособности на глобальных рынках в перспективе 10–20 лет, – а именно на это ориентирует Национальная технологическая инициатива (НТИ), – высокотехнологичной компании нужно быть лидером уже сейчас, как минимум, иметь эффективные бизнес-модели для работы на различных сегментах глобальных рынков.
Уверен, что данный рабочий доклад предложит высокотехнологичным компаниям конкретные актуальные темы для размышлений, ориентиры в вопросах цифровой трансформации бизнес-моделей и бизнес-процессов, будет способствовать решению научно-технологических проблем-вызовов, с которыми они сталкиваются в контексте IV промышленной революции, и даст импульс к развитию лидерства российских высокотехнологичных компаний на глобальных рынках.
Резюме главы:
Новая парадигма цифрового проектирования и моделирования позволяет в кратчайшие сроки разрабатывать и создавать глобально конкурентоспособную продукцию нового поколения.
В основе новой парадигмы цифрового проектирования и моделирования лежит использование сложных мультидисциплинарных математических моделей с высоким уровнем адекватности реальным материалам, конструкциям и физико-механическим/производственным процессам, применение best-in-class технологий, разработка цифровых двойников как продукции, так и ее производства.
Глава 2. Новая парадигма цифрового проектирования и моделирования глобально конкурентоспособной продукции нового поколения
Перечисленные в предыдущей главе 15 ключевых компонентов цифрового производства позволяют компаниям быть конкурентоспособными, повышать производительность труда, снижать время вывода продуктов на рынки, себестоимость производимой продукции, повышать скорость управленческих решений и качества продуктов и сервисов. Вместе с тем можно утверждать, что применение этих компонентов является лишь необходимым, но никак не достаточным условием присутствия на глобальном рынке. Их наличие, вообще говоря, не обеспечивает инновационный прорыв и создание глобально конкурентоспособной продукции нового поколения.
Инновационный прорыв может обеспечить оптимальное и эффективное комплексирование различных лучших в мире (best-in-class) технологий с добавлением оригинальных кросс-отраслевых интеллектуальных ноу-хау, сформированных, как правило, в процессе работы с различными промышленными компаниями – мировыми лидерами в рамках международной системы разделения труда, участия в глобальных технологических цепочках. В итоге формируется комплексное высокотехнологичное решение, которое априори является лучшим в мире и которое, а это принципиально важно, обеспечивает в кратчайшие сроки проектирование и производство глобально конкурентоспособной продукции нового поколения.
По итогам опроса на первые пять строк вышли технологии, которые в целом аналитиками обычно связываются с Индустрией 4.0:
- цифровое проектирование и моделирование (этот комплекс технологий отметили 50% компаний);
- аддитивные технологии (3D-printing) (35%);
- материалы с заданными свойствами (27%);
- робототехника (27%);
- интернет вещей (IoT) (27%).
Источник: Центр НТИ СПбПУ по материалам [1, c. 28]
На первое место вышло цифровое проектирование и моделирование, важность которого отметила половина респондентов (стоит отметить, что основную часть респондентов составляют машиностроительные компании). Действительно, на сегодняшний день вряд ли возможно представить успешно функционирующее высокотехнологичное предприятие, не использующее цифровые технологии, по крайней мере, на некоторых этапах [1, с. 27–28].
Еще более 40 лет назад создание и применение в разработке технических систем и конструкций CAD-систем (систем автоматизированного проектирования, САПР) было признано Национальным научным фондом США (NSF) величайшим событием, позволившим резко повысить производительность труда и сравнимым в этом смысле, пожалуй, лишь с началом эпохи электричества [2, p. vii].
Однако сегодня перед высокотехнологичной промышленностью ставятся всё более амбициозные задачи, для решения которых требуются всё более совершенные подходы, технологии и инструменты. По данным опроса, проведенного специалистами аналитического агентства Aberdeen Group и включавшего более 550 респондентов – компаний-мировых лидеров из различных отраслей промышленности, за последние несколько лет производимая продукция стала значительно сложнее: возросло число механических и электронных компонентов, число строк программного кода, в результате чего проявились некоторые негативные тенденции, связанные с увеличением продолжительности и стоимости разработок и исследований, потерей качества изделий и, как следствие, снижением прибыли компаний-разработчиков, а в некоторых случаях – и репутационным ущербом [3, с. 19–20].
Рисунок 2. Слева: рост сложности разработок в 2015–2017 гг., справа: негативные тенденции, характерные для разработки новых продуктов в 2015–2017 гг.

Источник: Центр НТИ СПбПУ по материалам [3, с. 19]
В сложившейся ситуации требуется кардинальное изменение подхода к проектированию, что возможно благодаря применению технологий математического и численного моделирования. Использование данных технологий, начиная с самых ранних этапов, дает существенные преимущества для соблюдения трех основных критериев успешности исследований и разработок: сроков, стоимости и качества [3, c. 20].
Рисунок 3. Бизнес-преимущества применения многодисциплинарного моделирования

Источник: Центр НТИ СПбПУ по материалам [3, с. 20]
Рисунок 4. Сравнительный анализ традиционного и современного подходов к построению физических и математических моделей

Источник: Центр НТИ СПбПУ по материалам [4]
За счет применения новой парадигмы цифрового проектирования и моделирования стало возможным уйти от традиционной ситуации, когда число изменений изделия (в силу допущенных ошибок или полученных новых, ранее не учтенных сведений) и, соответственно, возрастающие затраты на их внесение распределяются на протяжении всего жизненного цикла разработки – от стадии проектирования до начала серийного производства (известно, что чем позже вносятся изменения, тем большие издержки несет компания). В итоге становится принципиально возможным сосредоточить основную долю изменений и затрат на стадии проектирования, тем самым значительно минимизировать общий объем затрат, сократить издержки и обеспечить создание наукоемких высокотехнологичных изделий нового поколения в кратчайшие сроки.
Рисунок 5. Сравнение традиционного и передового подходов к производству

Источник: Центр НТИ СПбПУ по материалам [5]
Так, условное начало можно отнести к 2004 году, когда по инициативе Министерства энергетики США был принят High-End Computing Revitalization Act, направленный на поддержку разработки систем высокопроизводительных вычислений (HPC-систем, включающих программное и аппаратное обеспечение) для промышленных и научных нужд путем создания специализированных центров, исследовательских команд, обеспечения трансфера технологий из науки в промышленность и обеспечения доступа научного сообщества к передовым промышленным HPC-системам (High Performance Computing системы – системы высокопроизводительных вычислений) [8].
Одновременно в 2011 году стартовала уже вышеуказанная инициатива Advanced Manufacturing Partnership, а также Materials Genome Initiative (MGI), цель которой – в два раза ускорить и удешевить процесс открытия, производства и массового внедрения передовых материалов за счет компьютерного проектирования на атомарном уровне.
Рисунок 6. Аддитивное комплексирование государственных инициатив по развитию HPC-систем, передовых материалов и передовых производственных технологий в США

Источник: Центр НТИ СПбПУ по материалам [8; 9; 10; 11; 12; 13]
В основе новой парадигмы цифрового проектирования и моделирования лежит использование сложных мультидисциплинарных математических моделей с высоким уровнем адекватности реальным материалам, конструкциям и физико-механическим процессам (включая технологические и производственные), описываемых уравнениями математической физики, в первую очередь, 3D нестационарными нелинейными дифференциальными уравнениями в частных производных.
1) фундаментальные законы и науки (математическая физика, теории колебаний, упругости, пластичности и т. д., механика разрушения, механика композиционых материалов и композитных структур, контактного взаимодействия, динамика и прочность машин, вычислительная механика, гидроаэродинамика, тепломассообмен, электромагнетизм, акустика, технологическая механика и др.);
2) геометрические (CAD) и вычислительные конечно-элементные (CAE) полномасштабные модели реальных объектов и физико-механических процессов;
3) полные данные о материалах, из которых изготавливается изделие, включая данные о поведении материалов при воздействии тепловых, электромагнитных и др. полей, скоростном деформировании, вибрационном, ударном, мало- и многоцикловом нагружении;
4) информацию об эксплуатационных режимах (нормальные условия эксплуатации, нарушения нормальных условий эксплуатации, аварийные ситуации и т. д.), включая информацию, которая обеспечивает заданное поведение конструкции в тех или иных ситуациях (так называемое программируемое поведение);
5) данные о технологиях производства и сборки как отдельных элементов, так и конструкций в целом;
6) прочие характеристики и параметры.
Наиболее полной и сложной оценкой качества и безопасности автомобиля является натурный краш-тест. Каждый автомобиль должен удовлетворять всем требованиям серии сертификационных и рейтинговых испытаний, для того чтобы обеспечить его глобальную конкурентоспособность на мировом рынке. При этом натурные испытания являются чрезвычайно дорогостоящими, поэтому единственным способом минимизировать затраты и сократить время вывода на рынок автомобиля является проведение виртуальных испытаний (подчеркнем, что у лидеров мирового автомобилестроения произошло радикальное изменение соотношения числа натурных и виртуальных испытаний: если в 2007 году соотношение было 100 к 100, то в 2017 году – уже 5 к 10 000!).
Виртуальный краш-тест автомобиля является мультидисциплинарной вершиной, в которой представлены практически все науки – от материаловедения, механики до технологий изготовления – и, конечно же, все физико-механические процессы, связанные с аэродинамикой, вибрациями, динамикой, прочностью и усталостью, все типы нелинейностей (геометрические, физические, контактные взаимодействия, накопление повреждений, локальные разрушения и т. д.), широко применяется весь спектр технологий оптимизации и т. д.
В целях уменьшения массы конструкции, снижения себестоимости, улучшения прочностных, вибрационных, акустических, эксплуатационных и других показателей в кузове автомобиля премиум-класса применяется ~ 200 различных материалов, среди которых металлы, сплавы, полимеры, композиционные материалы, наконец, метаматериалы с оптимальной микроструктурой. Для корректного описания физико-механических процессов, проходящих в конструкции при различных воздействиях, например, динамических, для каждого материала необходимо знать достаточно обширный набор параметров и характеристик, включая кривые упруго-пластического деформирования при различных скоростях деформирования, критерии начала разрушения, модели его развития, модели накопления повреждений в материалах и т. д.
Не менее важно учесть сопряжения элементов конструкции кузова между собой. Они осуществляются посредством сварных точек и швов, клеевых линий. Лишь в одном кузове автомобиля премиум-класса может присутствовать более 7 000 сварных точек и более 6 метров сварных швов, различные виды клеевых соединений – стекольный, структурный, полуструктурный, расширяющийся. Для каждого из них характерна своя модель поведения при различных воздействиях. От расположения сварных соединений сильно зависит поведение конструкции кузова (прочность, вибрации, усталость, долговечность, акустика, …), а при краш-тестах чрезвычайно важны зоны программируемого разрушения, благодаря чему в определенные моменты времени (на определенных миллисекундах) локально разрушаются строго определенные элементы конструкции в строго определенных зонах и, что принципиально важно, динамически разрушаются таким образом, чтобы обеспечить безопасность пассажиров.
Для проведения виртуальных краш-тестов необходимо иметь полные виртуальные аналоги всего испытательного оборудования, всех испытательных стендов, которые применяется при проведении натурных испытаний. Они составляют виртуальный испытательный полигон, в который входят модели антропоморфных манекенов, позволяющие с высокой степенью точности воспроизвести биомеханическое динамическое поведение тела человека при различных нестационарных воздействиях и оценить критерии травмирования, модели семейства манекенов для мужчин, женщин и детей содержат более 10 000 измерительных датчиков, более 20 барьеров для проведения различных сертификационных и рейтинговых испытаний, и 20 ударников различных частей тела человека для дополнительных оценок, в том числе оценок безопасности пешеходов при столкновении с автомобилем.
Принципиально важным представляется отличие SDS от понятия цифровой тени (Digital Shadow, DS). В этом случае под цифровой тенью понимается низкоадекватная 3D геометрическая модель, уровень адекватности которой пытаются повысить за счет длительных и дорогостоящих натурных испытаний или режимов эксплуатации и поступающих данных с избыточного количества датчиков на реальном объекте.
Рисунок 7. Традиционный и современный подход к построению физических и математических моделей

Источник: Центр НТИ СПбПУ
Источник: Центр НТИ СПбПУ
Понятно, что детально разработанная и эффективно применяемая для решения задач во многих отраслях высокотехнологичной промышленности новая парадигма проектирования чрезвычайно мало имеет общего с 3D геометрической моделью и простейшими расчетами, с которыми зачастую (неверно) ассоциируется цифровое проектирование и моделирование.
Рисунок 9. Экосистема технологий, испытательный полигон (TestBed), CML-Цифровая платформа CML-Bench, CML-Экспертная интеллектуальная система CML-AI, Цифровые фабрики

Рисунок 10. Отдельные производственные технологии на цикле зрелости технологии Гартнера 2016 и 2017 года (Gartner Hype Cycle for Emerging Technologies)

Источник: Центр НТИ СПбПУ по материалам [14; 15]

Комплексные услуги инжиниринга и поставки высокотехнологичного оборудования, программного обеспечения и материалов для промышленных предприятий, лабораторий, исследовательских центров и образовательных учреждений.
Цифровое проектирование высокотехнологичных изделий
Для производства XXI века невозможно создание новых конкурентоспособных изделий без применения современного программного обеспечения в связке с новейшим оборудованием. Цель данной статьи заключается в том, чтобы ознакомить читателя с современными инструментами цифрового проектирования, рассказать об их функционале, чтобы облегчить поиск в выборе нужного инструмента для решения поставленных задач.

После создания цифрового макета будущего изделия или отдельного элемента, наступает время использования систем компьютерного моделирования и анализа, или CAE (Computer-Aided-Engineering) систем. В CAE системах присутствуют различные математические модели (механики деформируемого твердого тела, механики жидкости и газа и др.), используя которые можно с высокой точностью смоделировать поведение реальных объектов. Благодаря этому, удалось уменьшить количество реальных испытаний и заменить их компьютерным моделированием.
Начнем с CAD систем. Существует большое количество как отечественных, так и зарубежных CAD систем. Можно выделить различные CAD системы по применению (машиностроение, строительство, электрические схемы и пр.), 2D или 3D системы, системы прямого моделирования или с деревом построения. Остановимся на рассмотрении CAD систем для 3D моделирования элементов машиностроения. В независимости от разработчика, данные инструменты позволяют создавать 3D детали, после чего объединять эти детали в 3D сборки, а на основе деталей и сборок создавать различные чертежи и спецификации. Основное отличие CAD систем заключается в различных встроенных функциях (дополнительные модули, элементы построения и пр.), удобству использования, а также цене. Подбор CAD систем очень индивидуален и зависит от многих факторов. Среди наиболее популярных решений можно выделить Siemens NX, Creo Parametric и др.
Так же, в связи с активным развитием аддитивных технологий, появляются абсолютно новые виды CAD систем, не похожие на традиционные. Их задача состоит в создании специальных сетчатых микроструктур (как наружных, так и внутренних), благодаря которым можно в несколько раз снизить массу изделия. Яркий представитель таких CAD систем – NTopology Element.
Теперь перейдем к рассмотрению CAE систем. Можно выделить несколько типов CAE систем: мощные системы с большим количеством математических моделей и легкие узконаправленные системы. Как правило, чем больше математических моделей встроено в CAE систему, тем сложнее и дольше необходимо обучать персонал для работы с ней, а также интегрировать ее в предприятие. Поэтому из всего многообразия CAE систем можно отметить ПО Catopo 3.4.0. компании CES Eckard (Германия). Ключевые особенности ПО Catopo:
- Простой и удобный пользовательский интерфейс, с основными управляющими элементами в виде древовидной структуры;
- Является полноценным инженерным расчетным пакетом, с возможностями проведения статических и температурных расчетов, модального анализа и топологической оптимизации;
- Качественный сеточный генератор, который в автоматическом режиме создает конечно-элементные сетки высокого качества, также возможно создание различных типов сгущения сетки (к поверхности, ребру, точке);
- Система лицензирования и особенности решателя позволяют проводить инженерные расчеты сложных составных конструкции (размерностью выше 10 млн. элементов) без ограничений по количеству расчетных ядер компьютера, возможен расчета на высокопроизводительных кластерах на ОС LINUX;
- Удобная система администрирования при использовании нескольких рабочих мест ПО Catopo.

ПО Catopo имеет необходимый функционал для простейшего инженерного анализа изделий, а с применением топологической оптимизации возможно существенное облегчение деталей с сохранением их механических характеристик. На рисунке 3 представлена топологическая оптимизация рычага автомобиля, для которого масса была снижена в два раза, при этом его прочность практически не изменилась.
Рисунок 3 – Применение топологической оптимизации в ПО Catopo 3.4.0: слева – первоначальный вариант рычага подвески автомобиля; справа – облегченный в два раза, оптимизированный вариант рычага.
Помимо математического моделирования поведения изделия при эксплуатации, с развитием сложных методов производства, таких как селективное лазерное сплавление металлических порошков, возникла необходимость в моделировании данного технологических процесса. Во время сплавления материал подвергается воздействию лазерного источника излучения с высокими термическими нагрузками, что приводит к формированию внутренних напряжений и последующему короблению заготовки.
Разработчик данного ПО компании GeonX (Бельгия) предоставляет пользователям моделировать целый ряд технологических процессов в том числе и аддитивное производство.

Подготовка архитектурно-строительных проектов в среде BIM – совокупность взаимосвязанных процессов по созданию информационной модели на основе требований заказчика. Технология проектирования, возведения и эксплуатации объекта в BIM рассматривается в разрезе жизненного цикла (от англ. product life cycle, PLM) изделия, в данном случае объекта строительства или сооружения. Информационная модель (ИМ), являясь цифровым аналогом, так же переживает все стадии ЖЦ: от идеи создания объекта до его реконструкции\демонтажа.

BIM можно рассматривать как сам процесс построения модели, так и саму конечную модель, насыщенную информацией. Информационная модель (ИМ) – это пригодная для компьютерной обработки информация о проектируемом или существующем строительном объекте, при этом:
нужным образом скоординированная, согласованная и взаимосвязанная;
имеющая геометрическую привязку;
пригодная для расчетов и анализа;
допускающая необходимые обновления;
интероперабельная.


Каждый элемент модели несет в себе геометрическую и атрибутивную информацию, об этом в соответствующей статье.
Единая информационная модель предполагает коллективную работу, которая объединяет специалистов всех разделов проектирования: технологов, архитекторов, конструкторов, инженеров внутренних и наружных сетей и т.д. Командная работа осуществляется в единой среде проектирования, СОД (СОД-среда общих данных) и должна соответствовать определенным правилам и взаимодействию между участниками процесса BIM моделирования, которые отражаются в BEP-документе.
Процесс создания BIM-модели схематично можно отобразить следующим алгоритмом:
запрос на создание (Заказчик);
формирование технического задания, EIR;
формирование исполнителем BEP- плана реализации проекта;
предпроект, компоновка оборудования;
конструкторские работы;
проектные работы;
утверждение, согласование;
разработка рабочей документации;
передача модели в строительство;
актуализация модели в течение ЖЦ;
архивирование.
Информация, поступающая в BIM модель, хранящаяся и обрабатываемая в этой модели, и получаемая из нее для дальнейшего использования показана на рисунке ниже:

Разработка и развитие модели производится в среде общих данных (CDE), это значит, что все заинтересованные лица имеют постоянный доступ к модели, наполненной полезной и актуальной информацией: инженерной, хронологической, финансовой и так далее:
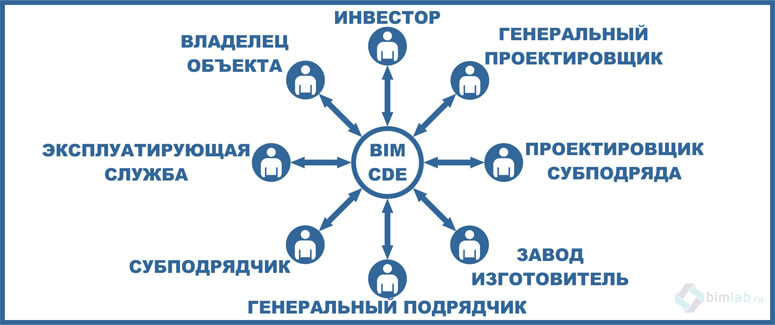
Делегирование уровней доступа для разного круга лиц, учавствующих в процессе взаимодействия при создании объекта обеспечивает чёткость и актуальность полученных данных для каждой задачи. Таким образом, BIM охватывает все стадии жизненного цикла здания или сооружения, непрерывно наполняя его ценной информацией, которая, в свою очередь существенно снижает стоимость его содержания (OPEX), сокращает скорость возведения, минимизирует проектные ошибки, позволяет всем заинтересованным лицам иметь оперативный доступ к информации.
Читайте также: