Для чего нужен электродвигатель кратко
Обновлено: 18.05.2024
Электродвигатель является специальной машиной, которая электрическую энергию преобразует в механическую. Учитывая род тока электроустановки, в которой работает электрическая машина, используются основные типы электродвигателей — постоянного и переменного тока.
Электромоторы переменного тока подразделяются на синхронные и асинхронные. Асинхронные, в свою очередь, делятся на общепромышленные, взрывозащищенные и крановые.
Электромашины переменного тока бывают однофазными и трехфазными. На современном этапе довольно широкое применение находят трехфазные синхронные и асинхронные электромоторы.
Сегодня асинхронные электромоторы являются наиболее востребованными электрическими двигателями. Такую широкую популярность асинхронные устройства получили из-за своей простоты конструкции и довольно высокой эксплуатационной надежности. Асинхронный электродвигатель довольно часто применяют в бытовой технике и на промышленных предприятиях.
В тех случаях, когда в приводах не нужны большие пусковые моменты, применяют электродвигатель с короткозамкнутым ротором. А когда не требуется плавной регулировки скорости и мощность электродвигателя большая, используется асинхронный электродвигатель с фазным ротором. Электромоторы асинхронные с фазным ротором используются в тех случаях, когда нужно снизить пусковой ток и увеличить пусковой момент.
Асинхронные однофазные агрегаты применяются в сети переменного тока 220 вольт. Такие электромоторы нашли широкое применение в бытовых стиральных машинах, бетономешалках, строительном электроинструменте, кухонных многофункциональных комбайнах, в деревообрабатывающих и сверлильных станках и другом бытовом оборудовании.
Асинхронные электрические двигатели также применяются для приводов различных крановых установок промышленного назначения, всевозможных грузовых лебедок и прочих устройств, которые применяются в производстве. Электромоторы переменного тока имеют огромное значение для многих отраслей промышленности. Асинхронные агрегаты могут быть с преобразовательным устройством в виде коллектора (коллекторные электродвигатели) или не иметь его (бесколлекторные электромоторы).
Коллекторные и бесколлекторные электродвигатели переменного тока применяются в различных промышленных и бытовых электроустройствах (холодильниках, пылесосах, мясорубках, электрическом инструменте, вентиляторах, соковыжималках) и в медицинской технике. Они рассчитаны на работу как от сети постоянного тока, так и от сети переменного тока. Для коллекторных электродвигателей характерен большой пусковой момент и относительно малые размеры.
Бесколлекторные электромоторы имеют малый уровень электромагнитных излучений и низкий уровень шума. Для них характерен высокий ресурс эксплуатации. В большинстве случаев бесколлекторные электродвигатели эксплуатируются в местах со взрывоопасной средой, например в нефтегазовой промышленности.
Довольно широкое распространение среди электромоторов переменного тока получили асинхронные электромоторы с трехфазной симметричной обмоткой на сердечнике статора, которые запитываются от сети переменного тока
Примечательно, что асинхронные электродвигатели, как правило, используются как двигатели, а синхронные электромоторы чаще всего используются как генераторы.
Синхронные электродвигатели являются двухобмоточными электрическими машинами, в которых одна из обмоток подсоединена к электрической сети с определенной постоянной частотой вращения, при этом вторая регулярно возбуждается постоянным током с частотой вращения ротора, которая не зависит от нагрузки. Такие машины применяются в качестве электродвигателей в крупных установках, таких как приводы поршневых компрессоров и воздухопроводов и, как правило, используются в качестве генераторов.
Скорость вращения синхронных моторов находится в постоянном соотношении к определенной частоте электрической сети.
Рольганговые электромоторы применяются для приводов, которые эксплуатируются в условиях высоких температур различного металлургического производства. Взрывозащищенные электромоторы предназначены для привода разных механизмов в газовой, химической, нефтеперерабатывающей промышленности, где могут появляться различные взрывоопасные соединения газов и паров с воздухом. Различные крановые электромоторы в основном предназначены для всевозможных крановых механизмов всех типов. Они могут быть применены для привода других механизмов, которые работают в кратковременных режимах эксплуатации.
Общепромышленные электромоторы широко используются в деревообрабатывающей промышленности, станкостроении, всевозможных системах промышленной вентиляции, различных транспортерах, подъемниках, всевозможном насосном оборудовании.
Электродвигатель – устройство для преобразования электроэнергии во вращательное движение вращающейся части электрической машины. Преобразование энергии в двигателях происходит за счет взаимодействия магнитных полей обмоток статора и ротора. Эти электрические машины широко используются во всех отраслях промышленности, в качестве привода электротранспорта и инструментов, в системах автоматизации, бытовой техники и так далее.
Существует множество видов электродвигателей, различающихся по принципу действия, конструкции, исполнению и другим признакам. Рассмотрим основные типы этих электрических машин.
По принципу действия различают магнитоэлектрические и гистерезисные электрические машины. Несмотря на простоту конструкции, высокий пусковой момент, последние не получили широкого распространения. Эти электродвигатели имеют высокую цену, низкий коэффициент мощности, ограничивающие их применение. Подавляющее большинство выпускаемых электродвигателей – магнитоэлектрические.
По типу напряжения питания различают:
- Электродвигатели постоянного тока.
- Двигатели переменного тока.
- Универсальные электрические машины.
По конструкции различают электродвигатели с горизонтально и вертикально расположенным валом. Кроме того, электрические машины классифицируют по назначению, климатическому исполнению, степени защиты от попадания влаги и посторонних предметов, мощности и другим параметрам.
Классы электродвигателей:
- Постоянного тока
- Бесщеточные ЕС (электронно-коммутируемые)
- Со щетками
- С последовательным возбуждением
- С параллельным возбуждением
- Со смешанным возбуждением
- С постоянными магнитами
- Переменного тока
- Универсальные
- Синхронные
- Индукционные
- Однофазные
- Трехфазные
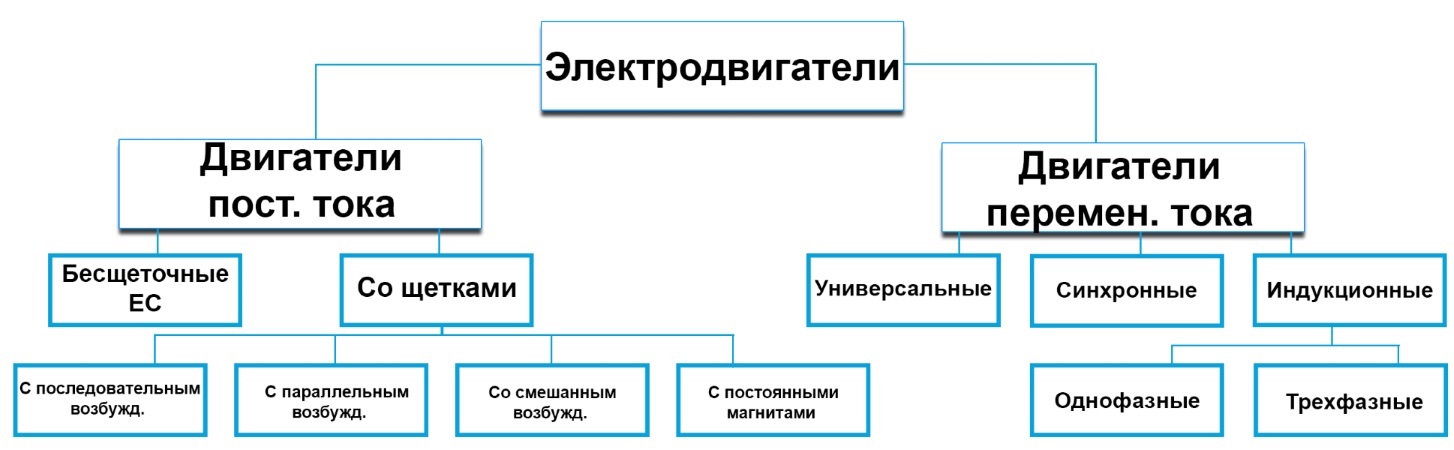
Таблица классификации электронных двигателей:
![]()
Электродвигатели постоянного тока
Двигатели постоянного тока широко применяются в качестве привода электротранспорта, промышленного оборудования, а также микропривода исполнительных механизмов. Такие электрические машины обладают следующими преимуществами:
- Возможность регулировки частоты вращения путем изменения напряжения в обмотке возбуждения. При этом крутящий момент на валу ДПТ (двигатели постоянного тока) остается неизменным.
- Высокий к.п.д. (коэффициент полезного действия) у машин постоянного тока несколько выше, чем у самых распространенных асинхронных двигателей переменного тока. При неполной нагрузке на валу к.п.д. ДПТ выше на 10-15%.
- Возможность изготовления ДПТ небольших габаритов. Практически все используемые микроприводы рассчитаны на постоянный ток.
- Простота схем управления. Для пуска, реверса и регулирования скорости и момента не требуется сложного электронного оборудования и большого количества аппаратов для коммутации.
- Возможность работы в режиме генератора. Электродвигатели такого типа можно использовать в качестве источников постоянного тока.
- Высокий пусковой момент. ДПТ используют в составе электроприводов кранов, тяговых и грузоподъемных механизмов, где требуется запуск под значительной нагрузкой.
ДПТ различают по способу возбуждения, они бывают:
- С постоянными магнитами. Такие двигатели отличаются малыми габаритами. Основная область их применения – микроприводы.
- С электромагнитным возбуждением.
Электрические машины с электромагнитами такого типа получили самое широкое распространение. Их классифицируют по способу подключения обмотки статора:
- Двигатели с параллельным возбуждением. Обмотки якоря и статора в электрической машине такого типа соединены параллельно. Такие электрические машины не требуют дополнительного источника питания для обмотки возбуждения, скорость вращения ротора практически не зависит от нагрузки. Их используют для привода металлорежущих станков и другого оборудования.
- Электродвигатели с последовательно включенной обмоткой статора. ДПТ этого типа имеют значительный пусковой момент. Их применяют в качестве привода электротранспорта и промышленных установок с необходимостью пуска под нагрузкой.
- Двигатели с независимым возбуждением. Для питания обмотки статора таких электромашин используется независимый источник постоянного тока. ДПТ такого типа отличаются широким диапазоном регулирования скоростей.
- Электрические машины со смешанным возбуждением. Электромагнит возбуждения в таких двигателях поделен на 2 части. Одна из них включена параллельно, вторая последовательно обмотке якоря. Электрические машины такого типа используются в механизмах и оборудовании, где необходим высокий пусковой момент, а также переменная и постоянная скорость при переменном моменте.
Электродвигатели переменного тока
Электрические машины такого типа широко используют для приводов всех типов технологического оборудования, электроинструментов, автоматических регуляторов. По наличию разности между скоростью вращения магнитного поля статора и частотой вращения ротора различают синхронные и асинхронные двигатели.
![]()
Асинхронные электродвигатели
Благодаря дешевизне и простоте конструкции электрические машины такого типа получили самое широкое распространение. Их принципиальное отличие – наличие так называемого скольжения. Это разность между частотой вращения магнитного поля неподвижной части электрической машины и скоростью вращение ротора. Напряжение на вращающейся части индуцируется за счет переменного магнитного поля обмоток статора двигателя. Вращение вызывает взаимодействие поля электромагнитов неподвижной части и магнитного поля ротора, возникающего под влиянием наведенных в нем вихревых токов. По особенностям обмоток статора выделяют:
- Однофазные двигатели переменного тока. Двигатели такого типа требуют для пуска наличия внешнего фазосдвигающего элемента. Это может быть пусковой конденсатор или индуктивное устройство. Область применения однофазных двигателей – маломощные приводы.
- Двухфазные электрические машины. Такие двигатели имеют 2 обмотки со смещенными относительно друг друга фазами. Их также используют для бытовых устройств и оборудования, имеющего небольшую мощность.
- Трех- и многофазные электродвигатели. Наиболее распространенный тип асинхронных машин. Электрические двигатели такого типа имеют от 3-х и более обмоток статора, сдвинутых по фазе на определенный угол.
По конструкции ротора асинхронные электрические машины делят на двигатели с короткозамкнутым и фазным ротором.
Обмотка ротора электрических машин первого типа представляет собой несколько неизолированных стержней, выполненных из сплавов меди или алюминия, замкнутых с двух сторон кольцами (конструкция “беличья клетка”). Асинхронные двигатели такого типа обладают следующими преимуществами:
- Достаточно простая схема пуска. Такие электрические машины можно подключать непосредственно к электрической сети через аппараты коммутации.
- Допустимость кратковременных перегрузок.
- Возможность изготавливать электрические машины высокой мощности. Двигатель такого типа не содержит скользящих контактов, препятствующих наращиванию мощности.
- Относительно простое ТО и ремонт. Асинхронные электромашины имеют несложную конструкцию.
- Невысокая цена. Двигатели асинхронного типа стоят дешевле синхронных машин и ДПТ.
Электрические машины с короткозамкнутым ротором имеют свои недостатки:
- Предельная скорость вращения составляет не более 3000 об/мин при входе в синхронный режим.
- Технически сложная реализация регулирования частоты вращения.
- Высокие пусковые токи при прямом запуске.
Электродвигатели с фазным ротором частично лишены недостатков, присущих машинам с ротором конструкции “беличья клетка”. Вращающаяся часть электрической машины такого типа имеет обмотки, соединенные в схему “звезда”. Напряжение подводится к обмотке через 3 контактных кольца, закрепленных на роторе и изолированных от него.
Такие электродвигатели обладают следующими достоинствами:
- Возможность ограничивать пусковые токи при помощи резистора, включенного в цепь электромагнитов ротора.
- Больший, чем у электромашин с короткозамкнутым ротором, пусковой момент.
- Возможность регулировки скорости.
Недостатками таких двигателей являются относительно большие габариты и масса, высокая цена, более сложный ремонт и сервисное обслуживание.
Синхронные двигатели переменного тока
Как и в асинхронных электродвигателях, вращение ротора в синхронных машинах достигается взаимодействием полей ротора и статора. Скорость вращения ротора таких электрических машин равна частоте магнитного поля, создаваемого обмотками статора.
Обмотка неподвижной части двигателя рассчитана на питание от трехфазного напряжения. К электромагнитам ротора подключается постоянное напряжение. Различают явнополюсные и неявнополюсные обмотки. В синхронных двигателях малой мощности используют постоянные магниты.
Запуск и разгон синхронной машины осуществляется в асинхронном режиме. Для этого на роторе двигателя имеется обмотка конструкции “беличья клетка”. Постоянное напряжение подается на электромагниты только после разгона до номинальной частоты асинхронного режима. Синхронные двигатели имеют следующие особенности:
- Постоянная скорость вращения при переменной нагрузке.
- Высокий к.п.д. и коэффициент мощности.
- Небольшая реактивная составляющая.
- Допустимость перегрузки.
К недостаткам синхронных электродвигателей относятся:
- Высокая цена, относительно сложная конструкция.
- Сложный пуск.
- Необходимость в источнике постоянного напряжения.
- Сложность регулировки скорости вращения и момента на валу.
Универсальные двигатели
В отдельную группу выделяют универсальные электродвигатели, которые могут работать от сети переменного тока и от источников постоянного напряжения. Они используются в электроинструментах, бытовой технике, а также других маломощных устройствах. Конструкция такой электрической машины принципиально не отличатся от двигателя постоянного тока. Главное отличие – конструкция магнитной системы и обмоток ротора. Магнитная система состоит из изолированных друг от друга секций для снижения магнитных потерь. Обмотка ротора такой машины поделена на 2 части. При питании от переменного тока напряжение подается только на ее половину. Это делается в целях снижения радиопомех, улучшения условий коммутации.
К преимуществам таких машин относятся:
- Высокая скорость вращения. Универсальные электродвигатели развивают скорость до 10 000 об/мин и более.
- Питание от переменного и постоянного напряжения. Двигатели такого типа широко применяют для электроинструментов, имеющих дополнительные аккумуляторные батареи.
- Возможность регулирования скорости без использования дополнительных устройств.
Однако, такие электромашины имеют свои недостатки:
- Ограниченная мощность.
- Необходимость обслуживания коллекторного узла.
- Тяжелые условия коммутации при питании от переменного напряжения из-за наличия трансформаторной связи между обмотками.
- Электромагнитные помехи при подключении к сети переменного тока.
Каждый тип двигателя имеет свои достоинства и недостатки. Выбор электрической машины для привода любого оборудования делается исходя из условий эксплуатации, требуемой частоты вращения, экономической целесообразности, типа нагрузки и других параметров.
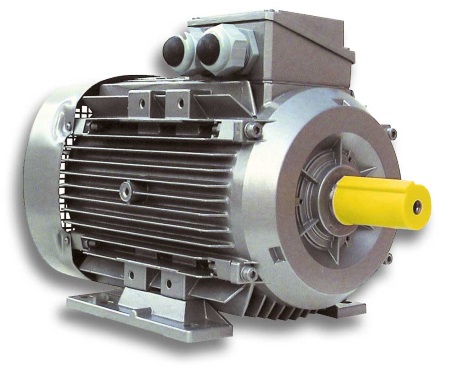
Говоря техническим языком, электродвигатель является элементом, который преобразует электричество в механическую энергию, что приводит в движение весь механизм. Поэтому двигатель и называют главным составляющим. Давайте же разберемся подробнее, для чего нужен электродвигатель, из чего он состоит и как работает.Первые модели были произведены еще в 19 ст. Но перед этим была четко сформулирована цель – получить механическую энергию для передвижения и других действий с помощью электричества.
Разберемся, из чего состоит электродвигатель. Главными элементами считаются статор – неподвижная часть (корпус) и ротор – подвижная часть механизма. Помимо этого, в состав двигателя входят еще десятки мелких деталей, таких как подшипники, обмотка из медной проволоки и так далее. На этой странице можно посмотреть все электрические характеристики электродвигателей.
![Что такое электродвигатель]()
Теперь давайте рассмотрим виды электрических двигателей. В основном они классифицируются по типу питания – это двигатели постоянного тока и переменного, и по принципу работы – синхронные и асинхронные. Двигатели постоянного тока так называются, так как работают от различных блоков питания, аккумуляторов и прочих батарей. Переменного, потому что соединяются напрямую с электрической сетью.
Синхронные механизмы имеют обмотки на роторе и подают на них напряжение для работы двигателя. Асинхронные – не имеют данных компонентов. Поэтому скорость вращения будет заметно медленнее, так отсутствует магнитное поле, созданного в статоре.
Как работает и что делает электродвигатель
Когда механизм соединяется с источником питания, на обмотке возникает магнитное поле, которое и вращает ротор в статоре. Это происходит по закону Ампера. Ведь создается отталкивающая сила, способная вращать вал и приводить в движение другие детали. Частота оборотов ротора напрямую зависит от частоты приходящего на витки электричества, а также от количества пар магнитных полюсов. Кстати, название данной разновидности пошло от того факта, что скорость вращения ротора различалась с частотой оборотов магнитного поля, то есть эти показатели были асинхронными.
Синхронные же двигатели немного отличаются строением ротора. В таком типе электродвигателей, ротор играет роль магнита, который и создает поле для вращения. Здесь магнитное поле статора и сам ротор вращаются с одинаковой частотой. Но есть один, очень значимый минус. Чтобы запустить синхронный электродвигатель, нужно воспользоваться помощью асинхронного. Ведь после простого подключения механизма к сети, ничего не произойдет.
К этому недостатку можно прибавить низкую скорость оборотов. К примеру, если взять асинхронный и синхронный двигатели и подключить их к источнику электричества одинакового напряжения, то первый тип будет вращаться заметно быстрее второго.
Для чего вообще написана эта статья? А дело в том, что в дальнейшем, в моих следующих статьях мы будем подключать различные типы двигателей в качестве исполнительных устройств к драйверам и контроллерам. "Мозгом" всего этого, конечно будет ESP8266. И для этого мы должны знать, а на что они, эти двигатели вообще способны и как ими управлять. Какой двигатель нам нужен в данном конкретном случае. Сразу скажу, наша классификация будет отличатся от классической (незначительно), так как нас интересует практика, а не теория. Ну а начнем как всегда с определения.
Определение
Электродвигатель - устройство с помощью которой электрическая энергия преобразуется в механическую, чаще всего во вращательное движение, но бывают и другие двигатели. И все же в 90% случаев имеются в виду вращающиеся двигатели.
Принцип действия
Лежит принцип электромагнитной индукции это, напомню, возникновение электрического поля (тока) под действием изменяющегося магнитного. Или другими словами изменяющиеся, магнитное поле порождает электрическое и наоборот. Поэтому любое изменяющиеся электрическое поле (а там где ток там и поле) породит магнитное, а оно при взаимодействие с "другим" магнитным полем вызовет отталкивание или притягивания элементов ротора и статора, а вот количество реализаций всего этого может быть огромное количество о чем и будет рассказано ниже.
Конструкция электродвигателя
Основными компонентами вращающегося электродвигателя являются две части статор и ротор.
- статор - неподвижная часть,
- ротор - вращающаяся часть.
Да и насчет якоря, с ним путаница. Якорем называется обмотка по которой протекает ток при работе (для работы) двигателя, он может быть и подвижным и не подвижным, а значит как статором так и ротором. Часто якорем называют подвижную часть во многих электромагнитных приборах. Но вот в синхронной машине, что назвать якорем я честно не знаю.
Классификация
Классификация большая, путанная и многообразная, но она нас будет интересовать с практической точки зрения.
По типу питающего тока двигатели делятся на:
- переменного тока;
- постоянного тока;
- универсальные двигатели
Ну это самое простое, скажите Вы, нет не совсем все так просто.
Двигатель переменного тока.
Подключаются и работают от переменного тока (AC). Разделяются на синхронные и асинхронные двигатели. Но сразу же возникает путаница, а вот двигатель компьютерного вентилятора к каким относится? Мы об этом поговорим ниже.
Двигатель постоянного тока
Вы скажите да тут все просто, подключаем двигатель к постоянному току (DC) и значит он постоянного тока, так то так, но не совсем и даже не из за примера выше с вентилятором компьютера. Какой двигатель применяется в известных нам сетевых дрелях, болгарках, перфораторах, шлиф машинах и так далее, в тех инструментах которые мы включаем в бытовую сеть "220 вольт"? Да там применяется двигатель постоянного тока! Как так, скажите Вы? Мы же втыкаем его в сеть переменного тока "220 вольт"? Все очень просто соединяем обмотки якоря и возбуждения последовательно или параллельно, чтобы полярность изменялась одинаково и на роторе и на статоре. Все представлено на схеме ниже.
Универсальные двигатели
Как видно из примера выше некоторые коллекторные двигатели переменного тока можно подключить и к постоянному току, но с более низким напряжением.
Классификация двигателей постоянного тока
В свою очередь двигатели постоянного тока так же разделяются п о способу формирования магнитного поля на роторе:
- коллекторные двигатели;
- бесколлекторные (вентильные двигатели)
Но(! опять путаница) щёточно - коллекторный узел может применятся не только в двигателях постоянного тока, а как мы увидим ниже и в двигателях переменного тока.
Коллекторные двигатели
Применяется специальный щеточный коммутатор - коллектор.
Коллекторный узел от двигателя полотера.
На фото ниже видны щетка и коллектор двигателя шуруповёрта
Именно с помощью коллекторного узла формируется сначала ток на обмотках ротора, а затем и переменное магнитное поле которое взаимодействует с постоянным магнитным полем статора полученным с помощью постоянных или переменных магнитов. Так чаще всего, но может быть все наоборот, ротор будет постоянным магнитом, а на обмотках статора будет формироваться переменное магнитное поле. Именно такие двигатели используют в болгарках, дрелях и большинстве шуруповёртах (не всех). Такие же двигатели только постоянного тока используются в агрегатах машин, например стеклоподъёмники и дворники. По вариантам подключение обмоток они так же разделяются, но дальше мы уже не будем рассматривать и залезать в дебри.
Бесколлекторные (вентильные двигатели)
Все то же самое, что выше, но щёточно-коллекторного узла нет, он заменён электроникой, Отсюда и слово вентильный - управляемый силовыми ключами (вентилями). Так как отказались от коллектора то ротор конструктивно сделали без обмоточным, вместо этого используют постоянные магниты что конечно увеличивает цену. Кроме того для коммутации нужно знать положении ротора (хотя не всегда), для этого применяют разные датчики (их много разных) поэтому большинство двигателей применяется в электронной промышленности, а бесколлекторные двигатели иногда называют шаговыми хотя это не одно и то же. Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя бесколлекторный двигатель который способен поворачиваться на определённый угол и работать с определённой скоростью это достигается тем что конструктивно в бесколлекторных двигателях уже есть вся электроника как силовая так и контролирующая для поворота вала на определенный угол.
Классификация двигателей переменного тока
Двигатели переменного тока по принципу работы делятся:
- синхронные двигатели - ротор вращается со скоростью вращения магнитного поля в статоре.
- асинхронные двигатели - магнитное поле вращается быстрее ротора. Частота вращения ротора отстает от частоты статора на величину скольжения, которая составляет 0,012-0,06 (при стандартом частоте в 50 Гц)
Чаще, особенно в быту встречаются асинхронные двигатели, но в последнее время все больше и больше развития получают синхронные двигатели в связи с развитием микропроцессорной техники и электромобилей.
Конструкция
Мы разберем конструктивные различия классических представителей этих двух классов, но тут могут быть нюансы (я же говорил, что классификация путанная) и о них ниже.
Конструкция и сравнение синхронных и асинхронных двигателей.
Статоры идентичны конструктивно и функционально (несут одну функцию — создание магнитного поля)
Читайте также: