
Возможные проблемы использования роботов сообщение
Обновлено: 02.07.2024
Аннотация: Область исследования – применение робототехники в военном деле. Объектом исследование являются морально-этические и юридические проблемы, возникающие в данной предметной области, в первую очередь – в части автономного применения боевых роботов. Один из аспектов революции в военном деле - роботизация поля боя. Но реализация данной тенденции порождает определённые проблемы: в технологической, юридической и гуманитарной сфере. Как и для любого оружия, при применении боевых роботов могут происходить критичные ошибки, разделяемые специалистами на ошибки первого и второго рода. Но, если для обычного вооружения последствия этих ошибок предсказуемы, а ответственность за их результаты очевидна, то для случая применения боевых роботов ситуация намного сложнее. В статье, с применением общенаучных методов анализа и синтеза, исследованы основные аспекты данной проблемы. На основе обзорного анализа юридических и морально-этических проблем применения автономных боевых роботов, возможных последствий и причин появления ошибок первого и второго рода, возникающих при их боевом применении, в данной статье синтезирована постановка научной задачи решения проблемы разделения ответственности между разработчиками и эксплуатантами
Ключевые слова: морально-этические проблемы робототехники, юридические проблемы робототехники, применение оружия, применение боевых роботов, право и роботехника, автономные боевые роботы, роботизация поля боя, ошибочные решения, ошибки второго рода, разделение ответственности
Abstract: The scope of the research is the use of robots in the military. The object of the research is the moral, ethical and legal challenges that may arise in this sphere, first of all, in the use of automated battle robots. One of the revolutionary aspects in the military today is the robotization of the battle field. This trend creates certain technological, legal and humanitarian problems. Like any other weapons, robots may be used with crucial errors that experts divide into the errors of the first andn the second kinds. While consequences of such errors are quite predictable for usual weapons and it is no problem who bears a responsibility in case of errors being made, the situation is much more difficult for the use of military robots. The author of the article analyzes the main aspects of the matter using general research methods such as analysis and synthesis. Bsed on the review of legal, moral and aesthetical challenges of using automated military robots, possible consequences and errors of the first and the second kinds that may arise, the author of the article emphasizes the need to differentiate between responsibility of designers and responsibility of users.
erroneous decisions, moral and ethical problems of robotics, use of weapons, legal problems of robotics, the emergence of LARs, legal relations with robots, lethal autonomous robotics, robotics battlefield, errors of the second kind, sharing responsibility in robotics
Введение
Как показывает анализ исторического опыта, любые научные и технологические разработки рано или поздно находят применение в военной области. Не является исключением и такое направление, как робототехника. С учётом этого обстоятельства, писатели-фантасты и режиссёры утопий о будущем предсказывали потенциальную опасность, описывая случаи войны роботов с собственными создателями. Разумеется, это только фантастика. Да и роботы ранее никогда не применялись как боевые системы.
Конечно, можно возразить, что беспилотные средства как оружие применяются достаточно давно, с середины прошлого века. Но необходимо помнить, что эти средства - самонаводящиеся ракеты и управляемые бомбы, являются одноразовыми системами с ограниченными возможностями выбора цели. Это относится даже к самым совершенным из них, например, крылатым ракетам, оснащаемым системами управления с возможностью перенацеливания на конечном участке траектории. Все они являются не оружием, а боеприпасами, наводимыми в точку или на объект, указанный оператором. А под боевыми роботами [1] понимается именно оружие, участвующее в выборе цели и поражающее её дистанционно, в большинстве случаев без самоуничтожения. В этом заключается разница между ними.
1.Применение боевых роботизированных систем в современных вооруженных конфликтах
Организованное в полном соответствии с указанным принципом применение роботов на поле боя, например, в качестве разведывательных систем, позволило повысить эффективность ведения боевых действий. Но такое локальное решение, соответственно, обеспечивает и локальный прирост эффективности. В том числе, не решая проблему реализации одного из основных военно-технических принципов: поразить противника, находясь вне зоны его ответного поражения. Или, например, проблему сокращения длительности цикла поражения обнаруженных объектов, актуальность которой непрерывно растёт по мере повышения динамичности современных боевых действий.
Для решения указанных проблем логичным оказалось совместить вооружение и средства разведки на единой роботизированной платформе. Но что в таком случае делать с принятием решения на удар?
2.О некоторых проблемах развития боевой робототехники и источниках их возникновения
И пусть сейчас, хоть на простейшем уровне, разделение полномочий между машиной и человеком существует: до настоящего времени на всех этапах развития роботов от дистанционно управляемых к беспилотным аппаратам, решение на применение оружия всё-таки остаётся за человеком. Но в перспективе, эта функция может быть, и скорее всего будет, делегирована БЛА. Это решение объективно диктуется требованиями оперативности решения боевых задач, неразрывно связанное с возрастанием динамичности ведения современных военных действий. И его реализация изменит существующую ситуацию разделения полномочий и ответственности.
На практике реализация подобных решений, находящихся на грани юридических и морально-этических компетенций, ограничивается наличием ряда проблем, как технического, так и организационного характера. Проблем, без разрешения которых дальнейшее развитие боевой робототехники будет проблематично.
С научно точки зрения, наиболее очевидным алгоритмом решения подобных комплексных проблем является их декомпозиция на относительно автономные составные части с дальнейшим поиском путей локализации каждой из них.
Анализ особенностей составляющих процесса роботизации поля боя позволяет провести декомпозицию проблемы на составляющие, определяющие ряд нерешенных вопросов в рассматриваемых областях деятельности:
- проблемы безопасности роботизированного вооружения для эксплуатантов и мирного населения (некомбатантов);
- юридические и морально-этические вопросы в части разрешения на самостоятельные действия и применение робота против человека;
- проблема разделения ответственности за результаты и ошибки применения между разработчиками и эксплуатантами, и ряд других.
Впрочем, как отмечено ранее, проблема безопасности применения сопровождает любые сложные системы, в том числе роботизированные, и общие пути её решения активно разрабатываются: как технологические, так и организационные. С точки зрения разработки систем они регламентируются нормативными документами по производству [11,12] , а с точки зрения их использования, например, в гражданской сфере – правовыми документами по имущественным и неимущественным правам в соответствии с областью применения (Гражданским кодексом, Воздушным кодексом, Кодексами торгового мореплавания и внутреннего водного транспорта и т.п.).
С активным внедрением робототехнических систем в военном деле, с возрастанием мощности вооружения роботов, не менее актуальной стала проблема, характерная для боевых человеко-машинных систем: проблема парирования ошибок применения и ответственности в случае их возникновения. Напомним, что подобные ошибки в математической статистике принято разделять на ошибки первого и второго рода.
Таблица – Характер ошибок, возникающих в ходе принятия решений на применение оружия
Правильное решение на применение
Неверно использован (ошибка второго рода)
Неверно отменён (ошибка первого рода)
В военном деле к ошибкам первого рода (см.таблицу) относят необоснованный отказ от применения оружия, приводящий к невыполнению боевой задачи, непоражению важной цели. Эта ошибка, как показывает практика, типична для ведения военных действий и не вызывает особой тревоги, конечно, если не влечёт за собой крупного ущерба от непораженного противника. Меры предотвращения такой ошибки, как правило, организационные: повышение ситуационной осведомлённости, автоматизации поддержки принятия решений и т.п.
Как ни печально это констатировать, применение боевых (ударных) робототехнических систем неизбежно влечёт за собой ошибки как первого, так и второго рода. Указанные ошибки характерны как для применения автономных роботов, так и для разомкнутых систем с участием в контуре управления человека. Кроме того, опасности причинения вреда возникают не только в процессе применения оружия, но и при автономном маневрировании роботов, их небоевом применении как потенциально-опасных систем. Более того, ранее приведённые примеры [5,6] показывают, что подобные ошибки уже фиксируются в ходе локальных войн и вооруженных конфликтов. Соответственно, с развитием боевой робототехники масштаб ущерба от ошибок второго рода будет увеличиваться.
Неразрывно связана с указанной проблемой ещё одна спорная ситуация - это наличие юридического и этического права предоставлять машинам возможность самостоятельно принимать решение на поражение объектов, в которых может находиться и/или при поражении которых может пострадать человек.
Боевая необходимость делегации боевым роботам функции принятия решений, как отмечалось ранее, становится всё более актуальной. Увеличивается радиус действия этих машин, резко возрастают требования к оперативности поражения объектов противника. Одновременно, с развитием технологий искусственного интеллекта, создаётся технологическая возможность внедрения подобного решения.
В апреле 2013 и мае 2014 года указанная проблема обсуждалась на совещаниях, проводимых под эгидой ООН в рамках уточнения Конвенции о запрещении или ограничении применения различных видов вооружения [9] . Совет безопасности ООН рекомендовал установить мораторий на развитие автономных боевых роботов (Lethal autonomous robotics - LAR ).
Но указанное решение носит рекомендательный характер, оно не несёт статуса международного закона, обязательного к исполнению [13] . Пользуясь этим и методологической неопределённостью проблемы, ведущие промышленные государства продолжают разработку боевых роботов, в том числе – частично и полностью автономных.
Тем более, что, как указано ранее, процесс повышения автономности боевых робототехнических систем определяется объективными факторами развития вооруженного противоборства.
Во-первых , требованием кардинального сокращения длительности цикла разведки и поражения объектов противника в условиях современных высокодинамичных боевых действий. В современных конфликтах предельная величина этого цикла измеряется несколькими минутами и любая задержка при передаче и обработке команд может стать критичной.
Во-вторых , ростом уровня роботизации поля боя, определяющим кардинальное возрастание количества применяемых робототехнических систем при ограничении на максимальное число привлекаемых к управлению операторов.
И, в-третьих , повышением разнообразия и эффективности средств радиоэлектронного подавления каналов управления техническими системами. Для неавтономных роботов, действующих на большом удалении от пунктов управления ими, этот фактор весьма чувствителен. Повышение автономности существенно снижает эффективность радиоэлектронного противодействия. Особенно, если предусмотреть алгоритмическое парирование потери каналов связи и навигации робототехнической системы.
Возвращаясь к заявленной в статье проблеме: на кого будет возложена ответственность в случаях причинения роботами вреда своим военнослужащим или мирному населению? Разделение вины между изготовителем робототехнического средства, разработчиком программного обеспечения для него и оператором (эксплуатантом) системы становится актуальным как никогда. В то же время, юридически эта ситуация пока не отрегулирована.
Указанная проблема определяется самой структурой робототехнических систем, являющихся сложными изделиями, включающими технические средства и программное обеспечение, функционирующие в едином неразрывном цикле.
В свою очередь, программное обеспечение робототехнических систем разрабатывается целой кооперацией исполнителей: постановщиками задач, алгоритмистами, программистами, тестировщиками.
И это ещё для относительно простого случая, при отсутствии злонамеренного программно-аппаратного воздействия на робототехническую систему. В случае применения боевых роботов ситуация будет однозначно сложнее и характеризоваться попытками противника физически или программно нарушить целенаправленную работу боевых робототехнических систем. Соответственно, в цепочку ответственных добавятся разработчики защитных систем комплекса.
3.Формулировка задачи поиска решения проблемы
Таким образом, анализируя текущее состояние проблемы роботизации поля боя можно сделать ряд выводов:
1)Введение реально действующего запрета на применение автономных боевых роботов в обозримом будущем маловероятно, этот процесс, учитывая потребности ведения динамичных и высокотехнологичных боевых действий продолжится.
2)С ростом масштабов применения боевых робототехнических систем неизбежно увеличение количества ошибок их применения, как первого, так и второго рода. Организационно-технические меры по их снижению не будут давать полную гарантию от ошибок, лишь снижая вероятность их возникновения.
3)Первые два фактора неизбежно порождают морально-этическую и юридическую проблему определения ответственности за приносимый роботами вред и разделения её между разработчиками и эксплуатантами боевых роботов.
Акцентируясь на последней проблеме, можно сделать вывод о том, что проблема этичности создания автономных боевых роботов и юридической ответственности за возможные последствия их применения актуальна, но до настоящего времени не решена. То есть в настоящее время существует насущная научная задача, требующая скорейшего решения.
В общем виде данная задача может быть сформулирована как необходимость:
- разработки нормативных актов, регламентирующих принципы делегирования полномочий на применение оружия программному обеспечению автономных боевых робототехнических систем;
- уточнения системы нормативной документации по разработке и применению робототехнических систем в части юридического закрепления ответственности за различные этапы разработки и применения, а также за возникающие на них ошибки.
Сформулированная проблема является сложной научно-практической задачей, расположенной на стыке наук. Более того, решение задачи должно быть найдено не только и не столько для национальных правовых систем, сколько для системы международного права, обеспечив единые правила для всех. Для её решения требуется привлечение разнородных групп специалистов: юристов, техников, IT-специалистов. Но задача является актуальной и решение её объективно необходимо.
Все страны, включившиеся в гонку робототехнического вооружения, будут вынуждены решать сформулированную научную задачу. Россия – не исключение.
Заключение
В процессе развития вооружения, в том числе роботизированного, неизбежно придётся решать целый ряд технических [19,20,21] и организационных проблем [22,23,24,25] , в том числе и тех, на которые обращается внимание в данной статье и для парирования которых и в ней сформулирована, хоть и в обобщённой форме, постановка задачи.
Симулин А.А. и др. Некоторые аспекты использования робототехники в военном деле // Сборники конференций НИЦ Социосфера. 2015. –№27. – С.67-71.
ГОСТ Р 60.2.2.1-2016/ ИСО 13482: 2014 Роботы и робототехнические устройства. Требования по безопасности для роботов по персональному уходу. М.: Стандартинформ, 2016. – 78 с.
Вудворд С. Фолклендская война. Мемуары командующего Фолклендской ударной группы. — Симферополь: Доля, 2005. 415 c.
Чиров Д.С., Новак К.В. — Перспективные направления развития робототехнических комплексов специального назначения // Вопросы безопасности. – 2018. – № 2. – С. 50-59. DOI: 10.25136/2409-7543.2018.2.22737
Хрипунов С.П., Благодарящев И.В., Чиров Д.С. Военная робототехника: современные тренды и векторы развития // Тренды и управление. 2015. № 4. С. 410-422.
Выпасняк В.И., Тиханычев О.В. О повышении эффективности применения высокоточного оружия в военных конфликтах локального и регионального масштаба // Вестник Академии военных наук. – 2008. – №4(25). – С.43-48
Нестеров А. В. Возможны ли правоотношения и юридические взаимодействия между людьми и роботами? М.: Препринт, сентябрь 2016. – 14 с.
Лопатина Т. М. Некоторые аспекты проблемы моральной ответственности компьютерных систем // Правовые вопросы связи. – 2005. – №1. – с.12-13
Тиханычев О.В., Тиханычева Е.О. Проблемы использования потенциально опасных технологий в современном мире // Социосфера. – 2017. – № 2. – С. 33-36. DOI: 10.24044/sph.2017.2.6
Deborah G. Johnson. Computer Systems: Moral entities but not moral agents. In: Ethics and Information Technology. 2006. – №8. – pp.195-204. DOI 10.1007/s10676-006-9111-
Просто выделите и скопируйте ссылку на эту статью в буфер обмена. Вы можете также попробовать найти похожие статьи
При этом фантастические произведения, да и так сказать теоретическая концепция робототехники, рисовали нам радужные картины повсеместного использования роботов. Роботы должны были помогать людям, беря на себя сложную либо муторную работу.
Однако, когда дело дошло до собственно разработок, разработчики натолкнулись на отсутствие нормальных идей по использованию роботов. При том, что с технологической стороны всё, в общем, неплохо, но вот куда применять этот опыт не очень понятно, а те попытки, что есть, выглядят неубедительно.
Но все по порядку, и начну я, собственно, с того хорошего, что есть.

Роботы-конструкторы
Имея небольшую инструкцию и чутка упорства, из этих деталей можно собрать небольшого робота, хоть это и будет по сути лишь передвигающаяся машинка.
Используя же возможности Lego, можно собирать просто безумные механизмы. От гексаподов, до танков с ракетницами. От механизма для собирания кубика Рубика, до механического художника рисующего Мону Лизу.
Всем хороши такие конструкторы, и особенно хорош Lego. Однако есть одно но. Это ни разу не продукт для простых людей. Это продукты для инженеров. Инженеров, возможно, не по профессии, а по призванию, но все же инженеров, то есть для тех людей, которые любят конструировать механизмы, а таких по определению не так чтобы много, что означает, что эти конструкторы не сделают роботов чем-то естественным для общества. Чем-то естественным как, например, в свое время стали компьютеры.
Роботы-пылесосы
Самое, наверное, массовое использование роботов в быту на данный момент, это роботы-пылесосы. Притом, что стоимость их со временем все уменьшается, они вполне неплохо выполняют свою функцию, помогая в уборке в доме.
Конечно, полностью сделать уборку за человека они не способны, однако их использование точно повышает чистоту в доме. И вот это пока что наиболее удачное использование роботов в быту, о чем говорят и продажи таких роботов, люди их покупают миллионами.

В итоге у нас есть один действительно массовый продукт, и один продукт для обучения. И пока что это все, чем может похвастаться робототехника. Остальные представители роботов, уже не так впечатляют.
Роботы-собака
В свое время Sony выпустила забавную собаку-робота Aibo. Тогда казалось, что, наконец-то, роботы придут в дом каждого человека. Однако по итогу, хороших продаж эти собаки не показали, и дело было не только в не самой маленькой цене, сейчас аналогов дешевле хватает, да вот продажи у них тоже посредственные. Дело в том, что такие роботы являются всего лишь дорогой игрушкой, а у подобных вещей существует не самое хорошее свойства, с ними играют неделю – две, а потом забрасывают в дальний угол, за ненадобностью. Поэтому-то они и не стали массовым продуктом. Ими долго пользоваться не будут.

Nao, Darwin OP и ряд остальных. С одной стороны используется в качестве обучающих, и тогда выступают в одной категории с Lego mindstorms, а с другой используются для развлечения. В этом случае у них те же самые проблемы, как и у роботов-собак. Это дорогая игрушка, с которой играются неделю, а потом забрасывают куда подальше.

Выставочные роботы
Тут из личного опыта. Был на томском форуме молодых ученых U-novus, и там ездил робот от Московского технологического института. Про самого робота ничего не скажу, но так как я хотел на практике подтвердить свои теоретические догадки, то рядом с ним я провел достаточно много времени, наблюдая за людьми которые подходили к нему.
И народу заинтересованных было достаточно много! Одна проблема, поиграв с этим роботом пару минут, все теряли к нему интерес.
Справедливости ради, надо отметить, что в качестве экскурсоводов или передвижных справочных они вполне себе могут неплохо справляться, но тут вопрос в том, много ли нужно экскурсоводов или нужны ли передвижные справочные, когда есть просто таблички с информацией…

Квадрокоптеры
Условимся, что мы не рассматриваем те коптеры, которые управляются напрямую с пультов, а значит, роботами не являются.
Останется у нас не так уж много применений, которые пока что придумали.

Второе, это доставка грузов. От маленьких дронов в ресторане, до перевозки пиццы или других мелких посылок. Ну, дроны в ресторанах идея сразу плохая, все кто видел рваные раны от лопастей квадрокоптера, сразу поймут весь ужас использования их в закрытых помещениях.
Был бы, если бы не одна принципиальная проблема, стоящая в прочем не только перед именно индустрией роботов, но и, в общем, перед человечеством. И проблема это – низкая емкость современных аккумуляторов. Все нынешние квадрокоптеры могут летать около 30 минут. Некоторые умудряются до целого часа растянуть время полета, но не более. Много ли можно сделать за полчаса? Не очень.
Для тех же экстремалов, что грозит коптеру, когда пройдет эти полчаса? Он упадет куда-нибудь в пещеру/воду/вулкан/что угодно, а это потеря не самого дешевого коптера и уж точно дорогой камеры. Перевозка грузов также не шибко реалистичной видится, ты либо перевез одну посылку и потом сидишь заряжаешься, либо рискуешь уронить какой-нибудь фарфор на головы уличных прохожих.
Тут, правда, надо уточнить, что большие компании пытаются обойти это ограничение, например, создавая станции для подзарядки дронов, в которых коптер либо перезарядится и продолжит перевозить посылку, либо передаст ее другому дрону, который уже заряжен.
Но это все полумеры, и пока не смогут принципиально улучшить емкость аккумуляторов дроны навряд ли смогут выполнять свои функции так, как это задумывалось.
Есть еще несколько видов роботов, роботы телеприсутствия, роботы няньки, роботы учителя, и т.п. Но некоторые из них в принципе мало нужны, а другие пока что на слишком раннем этапе разработки, чтобы говорить об их успехе. Ну и в любом случае эти роботы, даже если получатся, будут занимать сильно узкую нишу.
Если же чего забыл или дурак и ничего не понимаю, пишите в комментариях.
Science Robotics провели опрос среди экспертов в робототехнике пытаясь выяснить, какие цели лежат на плечах разработчиков следующие 5-10 лет. Robot Report проанализировали результаты опроса и составили 10 проблем, с которыми столкнется индустрия в будущем.

Новые материалы и способы производства
Биороботы
Хотя последние 30 лет индустрия мало отошла от прежних правил, сейчас наступает переломный момент: исследователи все чаще засматриваются на механизмы, которые изобрела сама матушка-природа и стараются перенести их на роботов. Появятся аккумуляторы, которые работают по принципу метаболической конверсии. Приводы, работающие по типу мышц. Регенерирующие материалы. Адаптация к среде пребывания. Человеческое мышление. Разработка материалов, которые дадут возможность работам иметь все это уже запущена.
Совершенные источники энергии
Основная проблема роботов в том, что они энергозатратны. Поэтому улучшение акумуляторов и их эффективности главный приоритет в разработках, особенно если это касается дронов и других мобильных роботов. Разработки электрокаров повысили успешность и популярность этой области, но важно найти новые способы пополнения запасов энергии. Возможно, в будущем роботы научатся делать это с помощью солнечной энергии, вибраций или движения.

Групповое общение
Ориентирование на местности, которой нет на карте
Беспилотные автомобили, конечно, могут проехать тысячи километров без аварий, да только это с помощью карт. Как они будут действовать на местности, которая неизвестна? Новые дороги, которые не нанесены на карту, либо же дороги, которые закрыты на ремонт, а это не отмечено в навигаторе. Так что в будущем роботы должны будут научиться изучать местность перед ними и на основе этих данных решать, как им передвигаться. Умение адаптироваться, учиться и запоминать — важные вещи для будущих роботов.
Искусственный интеллект, которые реально интеллект
Все, что вы знаете о современных ИИ еще слишком далеко к тому, что действительно является интеллектом. В будущем ИИ смогу не только распознавать и осваивать объекты и образы, но и рассуждать на их основе и делать выводы, а для этого они должны ограничиться только небольшим массивом данных.
Нейрокомпьютерный интерфейс
Такая технология говорит о том, что люди смогут управлять компьютерами и девайсами мысленно. Но современное оборудование для считывания сигналов мозга слишком дорогое, больше и процесс работы довольно плохой. Сдвиги есть, уже сейчас разрабатывают протезы, которыми управляют при помощи разума. Например, Лес Боу имеет такой протез руки.
Роботы, способные к долгосрочному общению
Чем больше роботов будут доступны для людей в повседневной жизни, тем острее стоит вопрос об их социализации. Роботов придется научить общаться, коммуницировать, осваивать моральные нормы.
Автономные медицинские роботы
В медицине используют роботов для инвазивной хирургии, оптимизации больниц, мгновенной реакции при экстренных ситуациях, в протезах и, иногда, как компаньонов для больных. В будущем необходимо создать робота, который сможет самостоятельно проводить операции под присмотром хирурга, который будет подключаться к работе только в ответственный момент. Также роботы с помощью ИИ будут просчитывать возможные опасности и находить выходи из этих ситуаций с минимальными рисками для здоровья пациента.
Этические дилеммы
Об этом говорится уже не один десяток лет, но вот пять основных вопросов, актуальных сегодня:
Робототехники добились огромных успехов за последние годы, но у машин остается по-прежнему множество препятствий перед тем, чтобы плотно войти в нашу жизнь.

Журнал Science Robotics обозначил десять грандиозных задач, которые нужно решить, чтобы это стало реальностью. Редакторы журнала провели онлайн-опрос по нерешенным проблемам в робототехнике и опросили группу экспертов отрасли.
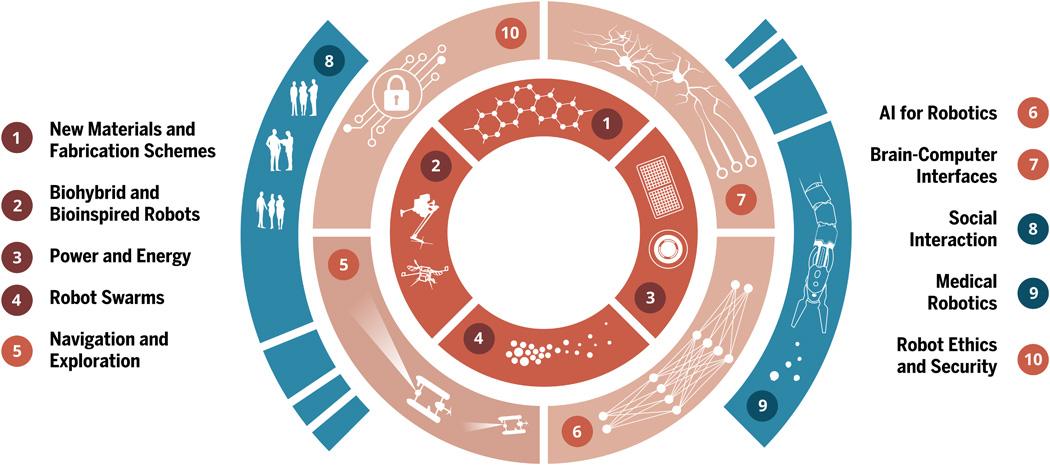
Новые материалы и схемы сборки
Робототехники начинают отходить от привычных двигателей, шестеренок и датчиков, экспериментируя с такими элементами, как искусственные мышцы, мягкая робототехника и новые методы сборки, которые совмещают множество функций в одном материале. Но большинство из списка этих достижений пока не прошли стадию демонстрации, а об объединении и вовсе рано говорить.
Многофункциональные материалы объединяют чувствительность, движение, сбор энергии или ее хранение и позволяют проектировать более эффективных роботов. Но сочетание этих свойств в одной машине потребует новых подходов, совмещающих микро- и макромасштабные техники сборки. Еще одним перспективным направлением стали материалы, которые могут меняться со временем, адаптируясь или восстанавливаясь, но в этой области требуется гораздо больше исследований.
Биовдохновленные и биогибридные роботы
Мощность и энергия
Хранение энергии — серьезный камень преткновения для мобильной робототехники. Растущий спрос на дронов, электромобили и возобновляемую энергию подталкивает прогресс в области батарей, но фундаментальные проблемы остаются по большей части неизменными долгие годы.
Из этого следует, что параллельно с развитием батарей есть необходимость минимизации потребления энергии роботами и оснащения их новыми источниками энергии. Дать роботам возможность использовать энергию своего окружения и передавать энергию им беспроводным путем — эти два перспективных подхода в настоящее время активно изучаются.
Рой роботов
Рой простых роботов, которые собираются в различные конфигурации для решения самых разных задач, может быть дешевой и гибкой альтернативой большим, специализированным роботам. Небольшие, недорогие и мощные элементы оборудования, позволяющие простым роботам чувствовать свое окружение и общаться, в сочетании с ИИ, который может моделировать этот вид поведения, уже существуют в природных роях.
Необходимо проводить больше работы над эффективными формами управления в разных масштабах — небольшие рои можно контролировать централизованно, но более крупные должны быть более централизованными. Они также должны быть прочными и адаптируемыми к изменяющимся условиям реального мира и устойчивыми к преднамеренному или случайному ущербу. Также необходимо больше работать над роями неоднородных роботов с дополнительными возможностями.
Навигация и разведка
Ключевым вариантом использования роботов является изучение мест, куда не могут попасть люди, например, в глубокое море, космос или зону бедствия. Это означает, что им нужно быть искусными в разведке и навигации без карт, зачастую в хаотичной и враждебной среде.
Основные проблемы включают создание систем, которые могут адаптироваться, учиться и восстанавливаться после сбоев в навигации, а также способны создавать и распознавать новые открытия. Это потребует автономии высокого уровня, которая позволит роботам отслеживать и перенастраивать самих себя, создавать картину мира из нескольких источников данных различной надежности и точности.
ИИ для роботов
Ключом к этому будет создание ИИ, который осознает свои собственные ограничения и может обучаться изучению новых вещей. Также важно создать системы, которые могут быстро учиться на основе ограниченных данных, а не на миллионах примеров, используемых в глубоком обучении. Дальнейшие успехи в нашем понимании человеческого интеллекта также будут необходимы для решения этих проблем.
Нейрокомпьютерные интерфейсы
Нейрокомпьютерные интерфейсы позволят незаметно управлять развитыми роботизированными протезами, а также обеспечат более быстрый и естественный способ передавать инструкции роботам или просто помогут им понимать психическое состояние человека.
Большинство современных подходов к измерению активности мозга дорогие и неуклюжие, поэтому мы нуждаемся в разработке компактных, эргономичных и беспроводных устройств. Они должны включать расширенное обучение, калибровку и адаптацию по причине того, что мы не можем точно считывать активность мозга. Кроме того, еще предстоит увидеть, смогут ли они сработать лучше, чем простые техники вроде отслеживания движения глаз или считывания мышечных сигналов.
Социальное взаимодействие
Если роботы хотят войти в человеческую среду, им нужно будет научиться общаться с людьми. Это сложно, потому что у нас не так много четко выраженных моделей поведения людей и мы склонны недооценивать сложность того, что кажется нам естественным.
Социальные роботы должны будут уметь воспринимать мельчайшие социальные сигналы, такие как выражение лица или интонация, понимать культурный и социальный контекст, в котором они работают, и моделировать психические состояния людей, с которыми взаимодействуют, адаптируя свои отношения в краткосрочной перспективе и проектируя долгосрочные отношения.
Медицинские роботы
Медицина — одна из областей, в которой роботы могут оказать существенное влияние уже в ближайшем будущем. Устройства, которые дополняют возможности хирурга, уже используются на повседневной основе, но дать им полную автономию мы пока не можем из-за высоких ставок и рисков.
Автономным ассистентам в лице роботов будет необходимо научиться распознавать человеческую анатомию в различных контекстах и использовать ситуативную осведомленность и голосовые команды для понимания того, что от них требуется. В хирургии автономные роботы могут выполнять обычные операции, освобождая хирурга для более тонкой и важной работы.
Микроботы, работающие в человеческом теле, тоже обещают многое, но находятся в зачаточной стадии своего развития.
Этика и безопасность роботов
По мере преодоления текущих задач и интеграции роботов в нашу жизнь, мы сталкиваемся с новыми этическими проблемами. Самое главное — мы можем стать чрезмерно зависимыми от роботов.
Это может привести к тому, что люди избавятся от определенных навыков и способностей и не смогут взять бразды правления в случае отказа роботизированной системы. Мы можем в конечном итоге делегировать задачи, которые по этическим соображениям неприятны для людей, и свалить все на автономные системы.
Читайте также: